| 1 |
孟琭,杨旭. 目标跟踪算法综述[J]. 自动化学报, 2019, 45(7): 1244-1260.
|
|
MENG L, YANG X. A survey of object tracking algorithms[J]. Acta Automatica Sinica, 2019, 45(7): 1244-1260.
|
| 2 |
卢湖川,李佩霞,王栋. 目标跟踪算法综述[J]. 模式识别与人工智能, 2018, 31(1): 61-76.
|
|
LU H C, LI P X, WANG D. Visual object tracking: a survey[J]. Pattern Recognition and Artificial Intelligence, 2018, 31(1): 61-76.
|
| 3 |
BOLME D S, BEVERIDGE J R, DRAPER B A, et al. Visual object tracking using adaptive correlation filters[C]// Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2010: 2544-2550. 10.1109/cvpr.2010.5539960
|
| 4 |
HENRIQUES J F, CASEIRO R, MARTINS P, et al. High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(3): 583-596. 10.1109/tpami.2014.2345390
|
| 5 |
DANELLJAN M, HÄGER G, KHAN F S, et al. Accurate scale estimation for robust visual tracking[C]// Proceedings of the 2014 British Machine Vision Conference. Durham: BMVA Press, 2014: No.38. 10.5244/c.28.65
|
| 6 |
LI Y, ZHU J K. A scale adaptive kernel correlation filter tracker with feature integration[C]// Proceedings of the 2014 European Conference on Computer Vision, LNCS 8926 . Cham: Springer, 2015: 254-265.
|
| 7 |
DANELLJAN M, HÄGER G, KHAN F S, et al. Learning spatially regularized correlation filters for visual tracking[C]// Proceedings of the 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2015: 4310-4318. 10.1109/iccv.2015.490
|
| 8 |
TAO R, GAVVES E, SMEULDERS A W M. Siamese instance search for tracking[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 1420-1429. 10.1109/cvpr.2016.158
|
| 9 |
BERTINETTO L, VALMADRE J, HENRIQUES J F, et al. Fully-convolutional Siamese networks for object tracking[C]// Proceedings of the 2016 European Conference on Computer Vision, LNCS 9914 . Cham: Springer, 2016: 850-865.
|
| 10 |
LI B, YAN J J, WU W, et al. High performance visual tracking with Siamese region proposal network[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 8971-8980. 10.1109/cvpr.2018.00935
|
| 11 |
REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[C]// Proceedings of the 28th International Conference on Neural Information Processing Systems. Cambridge: MIT Press, 2015: 91-99.
|
| 12 |
LI B, WU W, WANG Q, et al. SiamRPN++: evolution of Siamese visual tracking with very deep networks[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 4277-4286. 10.1109/cvpr.2019.00441
|
| 13 |
HE K M, ZHANG X Y, REN S Q, et al. Deep residual learning for image recognition[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 770-778. 10.1109/cvpr.2016.90
|
| 14 |
HE A F, LUO C, TIAN X M, et al. A twofold Siamese network for real-time object tracking[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 4834-4843. 10.1109/cvpr.2018.00508
|
| 15 |
VOIGTLAENDER P, LUITEN J, TORR P H S, et al. Siam R-CNN: visual tracking by re-detection[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 6577-6587. 10.1109/cvpr42600.2020.00661
|
| 16 |
WANG Q, ZHANG L, BERTINETTO L, et al. Fast online object tracking and segmentation: a unifying approach[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision Pattern Recognition. Piscataway: IEEE, 2019: 1328-1338. 10.1109/cvpr.2019.00142
|
| 17 |
LUKEŽIČ A, MATAS J, KRISTAN M. D3S — a discriminative single shot segmentation tracker[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 7131-7140. 10.1109/cvpr42600.2020.00716
|
| 18 |
HUANG Z Y, FU C H, LI Y M, et al. Learning aberrance repressed correlation filters for real-time UAV tracking[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 2891-2900. 10.1109/iccv.2019.00298
|
| 19 |
LI Y M, FU C H, DING F Q, et al. AutoTrack: towards high-performance visual tracking for UAV with automatic spatio-temporal regularization[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 11920-11929. 10.1109/cvpr42600.2020.01194
|
| 20 |
FU C H, CAO Z A, LI Y M, et al. Siamese anchor proposal network for high-speed aerial tracking[C]// Proceedings of the 2021 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2021: 510-516. 10.1109/icra48506.2021.9560756
|
| 21 |
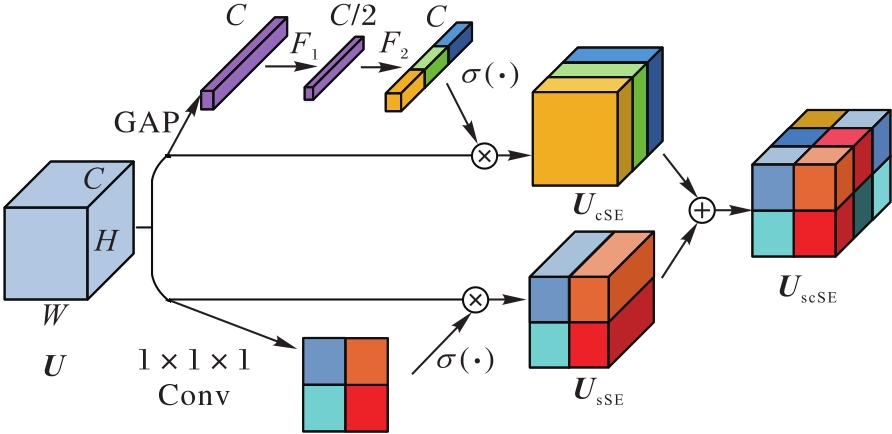
ROY A G, NAVAB N, WACHINGER C. Concurrent spatial and channel ‘squeeze & excitation’ in fully convolutional networks[C]// Proceedings of the 2018 International Conference on Medical Image Computing and Computer-Assisted Intervention, LNCS 11070. Cham: Springer, 2018: 421-429.
|
| 22 |
KRIZHEVSKY A, SUTSKEVER I, HINTON G E. ImageNet classification with deep convolutional neural networks[C]// Proceedings of the 25th International Conference on Neural Information Processing Systems. Red Hook, NY: Curran Associates Inc., 2012: 1097-1105.
|
| 23 |
GAO S H, CHENG M M, ZHAO K, et al. Res2Net: a new multi-scale backbone architecture[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021, 43(2): 652-662. 10.1109/tpami.2019.2938758
|
| 24 |
KRISTAN M, LEONARDIS A, MATAS J, et al. The visual object tracking VOT2016 challenge results [C]// Proceedings of the 2016 European Conference on Computer Vision, LNCS 9914. Cham: Springer, 2016: 777-823.
|
| 25 |
KRISTAN M, LEONARDIS A, MATAS J, et al. The sixth visual object tracking VOT2018 challenge results [C]// Proceedings of the 2018 European Conference on Computer Vision, LNCS 11129. Cham: Springer, 2019: 3-53.
|
| 26 |
KAEHLER A, BRADSKI G. Learning OpenCV 3: Computer Vision in C++ with the OpenCV Library[M]. Sebastopol, CA: O’Reilly Media Inc., 2016:407-413.
|
| 27 |
HU J, SHEN L, ALBANIE S, et al. Squeeze-and-excitation networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020, 42(8): 2011-2023. 10.1109/tpami.2019.2913372
|
| 28 |
LIN T Y, MAIRE M, BELONGIE S, et al. Microsoft COCO: common objects in context[C]// Proceedings of the 2014 European Conference on Computer Vision, LNCS 8693. Cham: Springer, 2014: 740-755.
|
| 29 |
RUSSAKOVSKY O, DENG J, SU H, et al. ImageNet large scale visual recognition challenge[J]. International Journal of Computer Vision, 2015, 115(3): 211-252. 10.1007/s11263-015-0816-y
|
| 30 |
XU N, YANG L J, FAN Y C, et al. YouTube-VOS: sequence-to-sequence video object segmentation[C]// Proceedings of the 2018 European Conference on Computer Vision, LNCS 11209. Cham: Springer, 2018: 603-619.
|
| 31 |
MUELLER M, SMITH N, GHANEM B. A benchmark and simulator for UAV tracking[C]// Proceedings of the 2016 European Conference on Computer Vision, LNCS 9905. Cham: Springer, 2016: 445-461.
|
| 32 |
ZHANG J M, MA S G, SCLAROFF S. MEEM: robust tracking via multiple experts using entropy minimization[C]// Proceedings of the 2014 European Conference on Computer Vision, LNCS 8694. Cham: Springer, 2014: 188-203.
|
| 33 |
HARE S, GOLODETZ S, SAFFARI A, et al. Struck: structured output tracking with kernels[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 38(10): 2096-2109. 10.1109/tpami.2015.2509974
|
| 34 |
WU Y, LIM J, YANG M H. Object tracking benchmark[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1834-1848. 10.1109/tpami.2014.2388226
|


 ), Lining TAN, Jiankun XU
), Lining TAN, Jiankun XU