《计算机应用》唯一官方网站 ›› 2022, Vol. 42 ›› Issue (3): 804-809.DOI: 10.11772/j.issn.1001-9081.2021040912
• 2021年中国计算机学会人工智能会议(CCFAI 2021) • 上一篇
刘斌1,2, 李港庆1,2( ), 安澄全1, 王水根2, 王建生2
), 安澄全1, 王水根2, 王建生2
Bin LIU1,2, Gangqing LI1,2(), Chengquan AN1, Shuigen WANG2, Jiansheng WANG2
摘要:
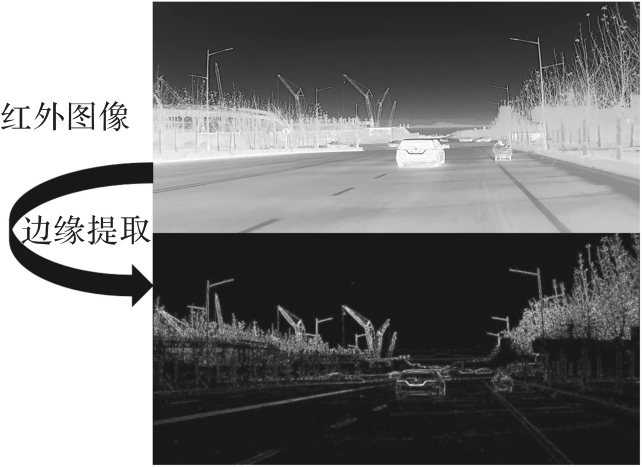
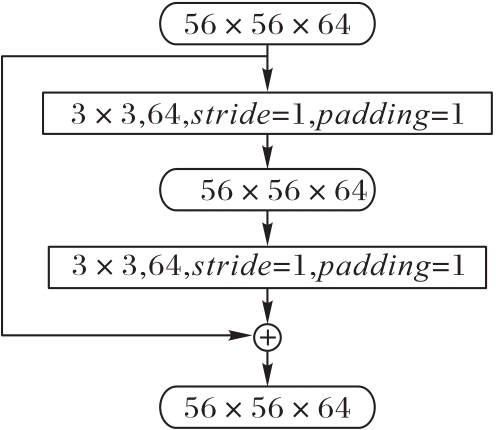
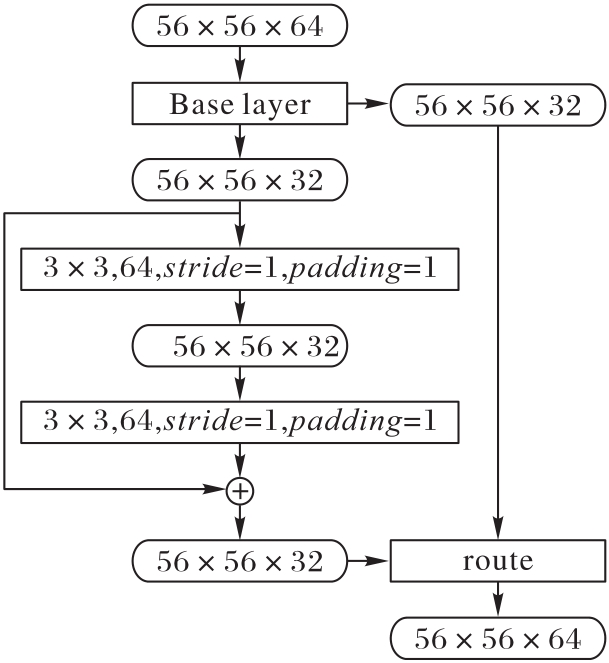
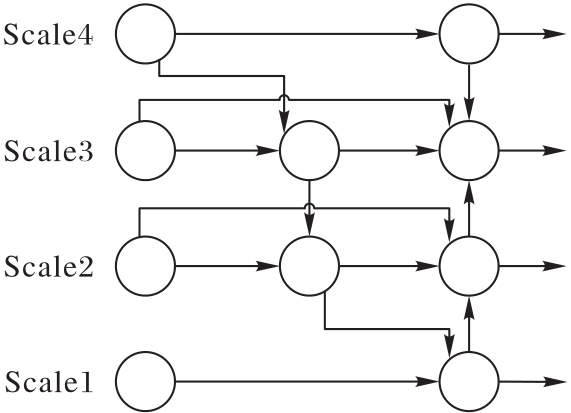
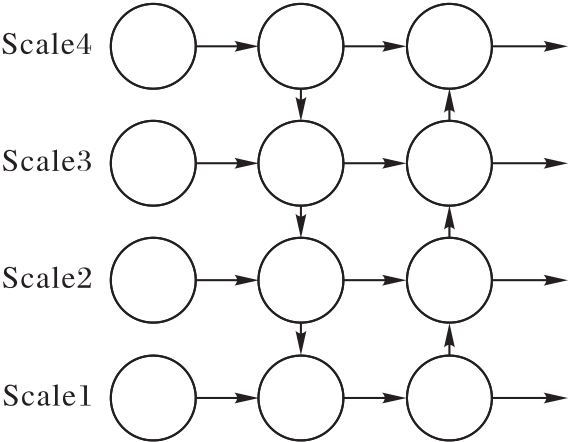
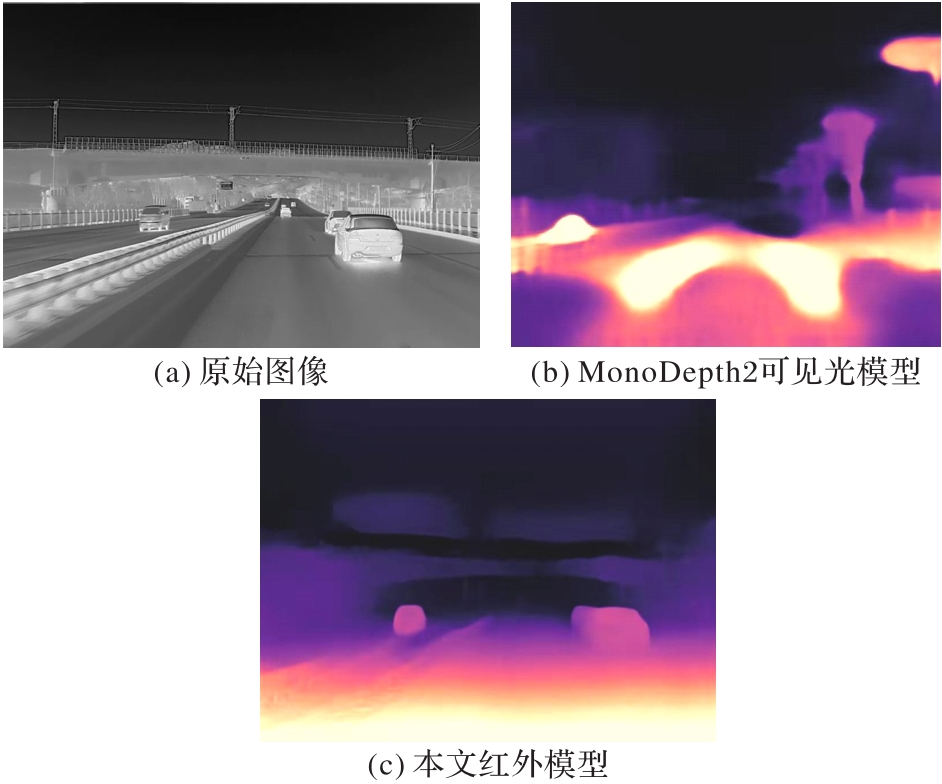
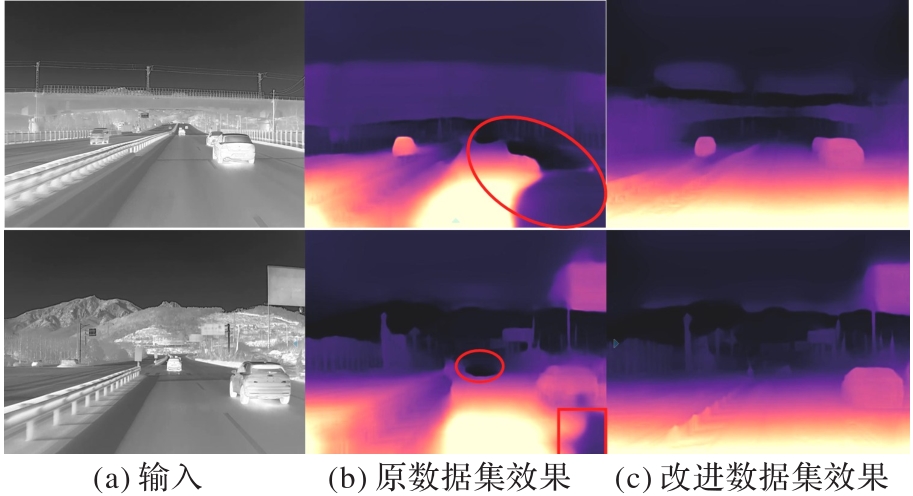
由于MonoDepth2的提出,无监督单目测距在可见光领域取得了重大发展;然而在某些场景例如夜间以及一些低能见度的环境,可见光并不适用,而红外热成像可以在夜间和低能见度条件下获得清晰的目标图像,因此对于红外图像的深度估计显得尤为必要。由于可见光和红外图像的特性不同,直接将现有可见光单目深度估计算法迁移到红外图像是不合理的。针对该问题,对MonoDepth2算法进行改进,提出了基于多尺度特征融合的红外单目测距算法。针对红外图像低纹理的特性设计了一项新的损失函数边缘损失函数,旨在降低图像重投影时的像素误匹配。不同于以往的无监督单目测距单纯地将四个尺度的深度图统一上采样到原图像分辨率计算投影误差而忽略了尺度之间的关联性以及不同尺度之间的贡献差异,将加权的双向特征金字塔网络(BiFPN)应用于多尺度深度图的特征融合,解决了深度图边缘模糊问题。另外用跨阶段部分网络(CSPNet)替换残差网络(ResNet)结构,以降低网络复杂度并提高运算速度。实验结果表明,边缘损失更适合红外图像测距,使得深度图质量更高;在加入BiFPN结构之后,深度图像的边缘更加清晰;将ResNet替换为CSPNet之后,推理速度提高了大约20个百分点。该算法能够准确估计出红外图像的深度,解决夜间低光照场景以及一些低能见度场景下的深度估计难题;该算法的应用也可以在一定程度上降低汽车辅助驾驶的成本。
中图分类号: