


《计算机应用》唯一官方网站 ›› 2022, Vol. 42 ›› Issue (9): 2885-2892.DOI: 10.11772/j.issn.1001-9081.2021071146
• 多媒体计算与计算机仿真 • 上一篇
收稿日期:2021-07-02
修回日期:2021-09-14
接受日期:2021-09-15
发布日期:2021-09-24
出版日期:2022-09-10
通讯作者:
马峻
作者简介:姚震(1996—),男,陕西商南人,硕士研究生,主要研究方向:深度学习、目标检测、目标跟踪;基金资助:
Jun MA1,2( ), Zhen YAO1, Cuifeng XU1,2, Shouhong CHEN1,2
), Zhen YAO1, Cuifeng XU1,2, Shouhong CHEN1,2
Received:2021-07-02
Revised:2021-09-14
Accepted:2021-09-15
Online:2021-09-24
Published:2022-09-10
Contact:
Jun MA
About author:YAO Zhen, born in 1996, M. S. candidate. His research interests include deep learning, target detection, target tracking.Supported by:摘要:
无人机(UAV)目标尺寸较小,多架无人机之间特征也不明显,且鸟类和飞虫的干扰给无人机目标的准确检测和稳定跟踪带来了巨大挑战。针对传统目标检测算法对小目标无人机检测性能差、跟踪不稳定的问题,提出一种基于改进PP-YOLO和Deep-SORT的多无人机实时跟踪算法。首先,将压缩-激励模块融入PP-YOLO检测算法中,以实现对无人机目标的特征提取和检测;其次,在ResNet50-vd结构中引入Mish激活函数,以解决反向传播过程中的梯度消失问题,并进一步提升检测精度;然后,采用Deep-SORT算法来实时跟踪无人机目标,并将提取外观特征的主干网络更换为ResNet50,从而改善原有网络对微小外观感知能力弱的状况;最后,引入损失函数Margin Loss,既提高了类别可分性,又加强了类内紧度和类间差异。实验结果表明,所提算法的检测平均精度均值(mAP)相比原始PP-YOLO算法提升了2.27个百分点,跟踪准确性相对于原始Deep-SORT算法提升了4.5个百分点。所提算法的跟踪准确性可达91.6%,能够实时跟踪600 m以内多架无人机目标,有效解决了跟踪过程中的“丢帧”问题。
中图分类号:
马峻, 姚震, 徐翠锋, 陈寿宏. 基于改进PP-YOLO和Deep-SORT的多无人机实时跟踪算法[J]. 计算机应用, 2022, 42(9): 2885-2892.
Jun MA, Zhen YAO, Cuifeng XU, Shouhong CHEN. Multi-UAV real-time tracking algorithm based on improved PP-YOLO and Deep-SORT[J]. Journal of Computer Applications, 2022, 42(9): 2885-2892.

图1 整体网络结构
Fig. 1 Overall network structure

图2 压缩-激励模块结构
Fig. 2 Squeeze-excitation module structure
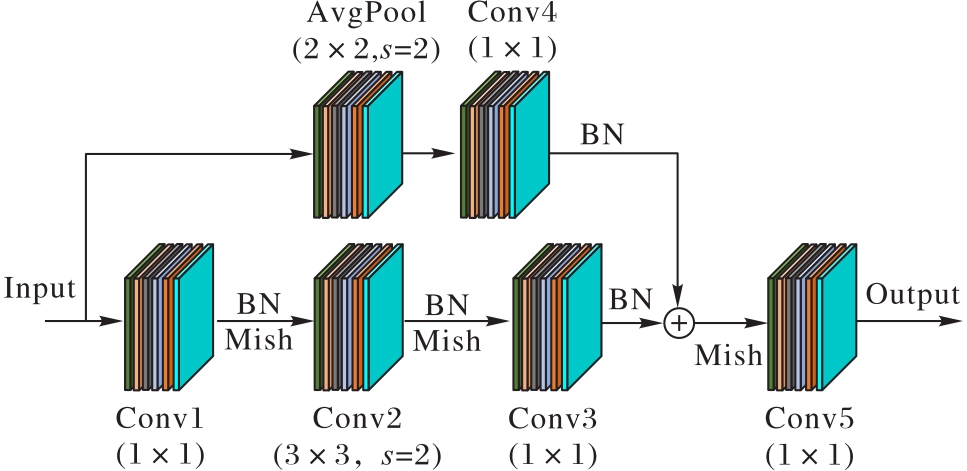
图3 引入Mish激活函数的ResNet50-vd结构
Fig. 3 ResNet50-vd structure with Mish activation function introduced

图4 自制无人机数据集
Fig. 4 Self-built UAV dataset

图5 无人机跨境识别的数据集
Fig. 5 Dataset of UAV cross-border identification
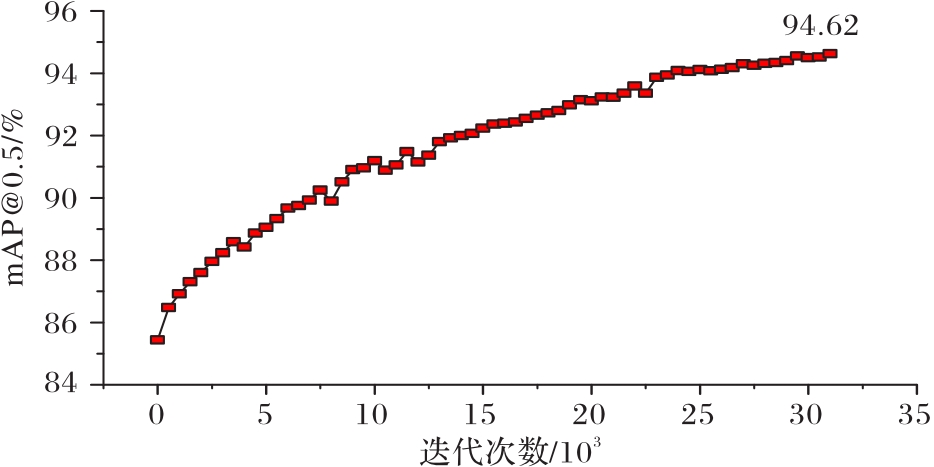
图6 平均精度曲线
Fig. 6 Average precision curve

图7 损失函数曲线
Fig. 7 Loss function curve
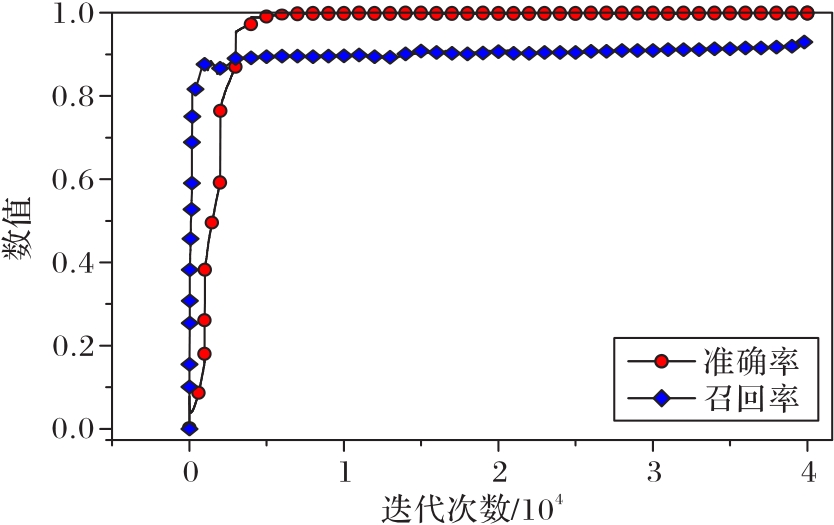
图8 度量学习准确率与召回率
Fig. 8 Measure learning precision and recall
| 算法 | TIB-Net | Drone-vs-Bird | 自制数据集(Homemade Dataset) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| mAP/% | Recall/% | FPS | mAP/% | Recall/% | FPS | mAP/% | Recall/% | FPS | |
| SSD | 87.28 | 92.35 | 12.1 | 90.25 | 91.05 | 13.5 | 90.32 | 92.34 | 14.3 |
| Faster RCNN | 89.31 | 91.18 | 15.2 | 90.12 | 92.20 | 18.2 | 90.41 | 92.75 | 17.6 |
| YOLOv3 | 84.36 | 90.24 | 36.1 | 89.15 | 91.68 | 35.8 | 90.30 | 92.68 | 39.4 |
| YOLOv4 | 85.44 | 90.35 | 35.2 | 89.61 | 92.35 | 37.5 | 90.47 | 90.05 | 40.2 |
| PP-YOLO | 87.12 | 91.29 | 48.8 | 89.86 | 92.61 | 45.3 | 92.82 | 93.28 | 47.2 |
| PP-YOLO+Mish | 88.25 | 93.17 | 47.6 | 90.36 | 92.89 | 44.5 | 93.36 | 93.75 | 45.9 |
| 本文算法 | 90.02 | 94.72 | 45.3 | 91.98 | 93.52 | 42.7 | 94.62 | 94.26 | 44.6 |
表1 常用目标检测算法在三种数据集上的表现
Tab. 1 Performance of common target detection algorithms on three datasets
| 算法 | TIB-Net | Drone-vs-Bird | 自制数据集(Homemade Dataset) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| mAP/% | Recall/% | FPS | mAP/% | Recall/% | FPS | mAP/% | Recall/% | FPS | |
| SSD | 87.28 | 92.35 | 12.1 | 90.25 | 91.05 | 13.5 | 90.32 | 92.34 | 14.3 |
| Faster RCNN | 89.31 | 91.18 | 15.2 | 90.12 | 92.20 | 18.2 | 90.41 | 92.75 | 17.6 |
| YOLOv3 | 84.36 | 90.24 | 36.1 | 89.15 | 91.68 | 35.8 | 90.30 | 92.68 | 39.4 |
| YOLOv4 | 85.44 | 90.35 | 35.2 | 89.61 | 92.35 | 37.5 | 90.47 | 90.05 | 40.2 |
| PP-YOLO | 87.12 | 91.29 | 48.8 | 89.86 | 92.61 | 45.3 | 92.82 | 93.28 | 47.2 |
| PP-YOLO+Mish | 88.25 | 93.17 | 47.6 | 90.36 | 92.89 | 44.5 | 93.36 | 93.75 | 45.9 |
| 本文算法 | 90.02 | 94.72 | 45.3 | 91.98 | 93.52 | 42.7 | 94.62 | 94.26 | 44.6 |
| 算法 | MOTA/% | MOTP/% | FN/帧 | FP/帧 | IDSW/帧 | FPS |
|---|---|---|---|---|---|---|
| JDE[ | 90.3 | 91.2 | 1 280 | 1 245 | 425 | 32.1 |
| Deep-SORT[ | 87.1 | 89.2 | 1 589 | 1 628 | 632 | 46.3 |
| CenterTrack[ | 90.9 | 92.3 | 1 306 | 1044 | 411 | 23.2 |
| SiamRPN++[ | 89.6 | 90.5 | 1 294 | 1 208 | 437 | 32.6 |
| FairMOT[ | 91.2 | 92.8 | 1 252 | 1 264 | 405 | 25.8 |
| 本文算法 | 91.6 | 92.6 | 1243 | 1 199 | 399 | 35.5 |
表2 本文算法在无人机视频中的跟踪结果
Tab. 2 Tracking results of the proposed algorithm in UAV videos
| 算法 | MOTA/% | MOTP/% | FN/帧 | FP/帧 | IDSW/帧 | FPS |
|---|---|---|---|---|---|---|
| JDE[ | 90.3 | 91.2 | 1 280 | 1 245 | 425 | 32.1 |
| Deep-SORT[ | 87.1 | 89.2 | 1 589 | 1 628 | 632 | 46.3 |
| CenterTrack[ | 90.9 | 92.3 | 1 306 | 1044 | 411 | 23.2 |
| SiamRPN++[ | 89.6 | 90.5 | 1 294 | 1 208 | 437 | 32.6 |
| FairMOT[ | 91.2 | 92.8 | 1 252 | 1 264 | 405 | 25.8 |
| 本文算法 | 91.6 | 92.6 | 1243 | 1 199 | 399 | 35.5 |

图9 跟踪效果对比
Fig. 9 Tracking results comparison
| 1 | PAWEŁCZYK M Ł, WOJTYRA M. Real world object detection dataset for quadcopter unmanned aerial vehicle detection[J]. IEEE Access, 2020, 8: 174394-174409. 10.1109/access.2020.3026192 |
| 2 | 闫若怡,熊丹,于清华,等. 基于并行跟踪检测框架与深度学习的目标跟踪算法[J]. 计算机应用, 2019, 39(2): 343-347. 10.11772/j.issn.1001-9081.2018061211 |
| YAN R Y, XIONG D, YU Q H, et al. Object tracking algorithm based on parallel tracking and detection framework and deep learning[J]. Journal of Computer Applications, 2019, 39(2): 343-347. 10.11772/j.issn.1001-9081.2018061211 | |
| 3 | HAO J X, ZHOU Y M, ZHANG G S, et al. A review of target tracking algorithm based on UAV[C]// Proceedings of the 2018 IEEE International Conference on Cyborg and Bionic Systems. Piscataway: IEEE, 2018: 328-333. 10.1109/cbs.2018.8612263 |
| 4 | HENRIQUES J F, CASEIRO R, MARTINS P, et al. Exploiting the circulant structure of tracking-by-detection with kernels[C]// Proceedings of the 2012 European Conference on Computer Vision, LNCS 7575. Cham: Springer, 2012: 702-715. |
| 5 | HENRIQUES J F, CASEIRO R, MARTINS P, et al. High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(3): 583-596. 10.1109/tpami.2014.2345390 |
| 6 | DANELLJAN M, HÄGER G, KHAN F S, et al. Discriminative scale space tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(8): 1561-1575. 10.1109/tpami.2016.2609928 |
| 7 | BEWLEY A, GE Z Y, OTT L, et al. Simple online and realtime tracking[C]// Proceedings of the 2016 IEEE International Conference on Image Processing. Piscataway: IEEE, 2016: 3464-3468. 10.1109/icip.2016.7533003 |
| 8 | WOJKE N, BEWLEY A, PAULUS D. Simple online and realtime tracking with a deep association metric[C]// Proceedings of the 2017 IEEE International Conference on Image Processing. Piscataway: IEEE, 2017: 3645-3649. 10.1109/icip.2017.8296962 |
| 9 | LIU Y C, LIAO L C, WU H, et al. Trajectory and image-based detection and identification of UAV[J]. The Visual Computer, 2021, 37(7): 1769-1780. 10.1007/s00371-020-01937-y |
| 10 | HE K M, ZHANG X Y, REN S Q, et al. Deep residual learning for image recognition[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 770-778. 10.1109/cvpr.2016.90 |
| 11 | DEMIR B, ERGUNAY S, NURLU G, et al. Real-time high-resolution omnidirectional imaging platform for drone detection and tracking[J]. Journal of Real-Time Image Processing, 2020, 17(5): 1625-1635. 10.1007/s11554-019-00921-7 |
| 12 | CRAYE C, ARDJOUNE S. Spatio-temporal semantic segmentation for drone detection[C]// Proceedings of the 16th IEEE International Conference on Advanced Video and Signal Based Surveillance. Piscataway: IEEE, 2019: 1-5. 10.1109/avss.2019.8909854 |
| 13 | RONNEBERGER O, FISCHER P, BROX T. U-Net: convolutional networks for biomedical image segmentation[C]// Proceedings of the 2015 International Conference on Medical Image Computing and Computer-Assisted Intervention, LNCS 9351. Cham: Springer, 2015: 234-241. |
| 14 | COLUCCIA A, FASCISTA A, SCHUMANN A, et al. Drone-vs-bird detection challenge at IEEE AVSS2019[C]// Proceedings of the 16th IEEE International Conference on Advanced Video and Signal Based Surveillance. Piscataway: IEEE, 2019: 1-7. 10.1109/avss.2019.8909876 |
| 15 | HU Y Y, WU X J, ZHENG G D, et al. Object detection of UAV for anti-UAV based on improved YOLO v3[C]// Proceedings of the 2019 Chinese Control Conference. Piscataway: IEEE, 2019: 8386-8390. 10.23919/chicc.2019.8865525 |
| 16 | REDMON J, FARHADI A. YOLOv3: an incremental improvement[EB/OL]. (2018-04-08) [2021-05-21].. |
| 17 | PHAM G N, NGUYEN P H. Drone detection experiment based on image processing and machine learning[J]. International Journal of Scientific and Technology Research, 2020, 9(2): 2965-2971. |
| 18 | TORVIK B, OLSEN K E, GRIFFITHS H. Classification of birds and UAVs based on radar polarimetry[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(9): 1305-1309. 10.1109/lgrs.2016.2582538 |
| 19 | COLUCCIA A, FASCISTA A, SCHUMANN A, et al. Drone vs. bird detection: deep learning algorithms and results from a grand challenge[J]. Sensors, 2021, 21(8): No.2824. 10.3390/s21082824 |
| 20 | SUN H, YANG J, SHEN J Q, et al. TIB-Net: drone detection network with tiny iterative backbone[J]. IEEE Access, 2020, 8: 130697-130707. 10.1109/access.2020.3009518 |
| 21 | LONG X, DENG K P, WANG G Z, et al. PP-YOLO: an effective and efficient implementation of object detector[EB/OL]. (2020-08-03) [2021-05-22].. |
| 22 | ZHANG Y F, WANG C Y, WANG X G, et al. FairMOT: on the fairness of detection and re-identification in multiple object tracking[J]. International Journal of Computer Vision, 2021, 129(11): 3069-3087. 10.1007/s11263-021-01513-4 |
| 23 | 金国栋,薛远亮,谭力宁,等. 基于双注意力混洗的无人机航拍目标跟踪算法[J/OL]. 北京航空航天大学学报. (2021-06-16) [2021-07-23].. |
| JIN G D, QUE Y L, TAN L N, et al. UAV aerial object tracking algorithm based on dual-attention shuffling[J/OL]. Journal of Beijing University of Aeronautics and Astronautics. (2021-06-16) [2021-07-23].. | |
| 24 | HU J, SHEN L, SUN G. Squeeze-and-excitation networks[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 7132-7141. 10.1109/cvpr.2018.00745 |
| 25 | SZANDAŁA T. Review and comparison of commonly used activation functions for deep neural networks[M]// BHOI A K, MALLICK P K, LIU C M, et al. Bio-inspired Neurocomputing, SCI 903. Singapore: Springer, 2021: 203-224. |
| 26 | ZHENG L, YANG Y, HAUPTMANN A G. Person re-identification: past, present and future[EB/OL]. (2016-10-10) [2021-05-28].. |
| 27 | DENG J K, GUO J, XUE N N, et al. ArcFace: additive angular margin loss for deep face recognition[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 4685-4694. 10.1109/cvpr.2019.00482 |
| 28 | ZHOU X Y, KOLTUN V, KRÄHENBÜHL P. Tracking objects as points[C]// Proceedings of the 2020 European Conference on Computer Vision, LNCS 12349. Cham: Springer, 2020: 474-490. |
| 29 | WANG Z D, ZHENG L, LIU Y X, et al. Towards real-time multi-object tracking[C]// Proceedings of the 2020 European Conference on Computer Vision, LNCS 12356. Cham: Springer, 2020: 107-122. |
| 30 | LI B, WU W, WANG Q, et al. SiamRPN++: evolution of Siamese visual tracking with very deep networks[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 4277-4286. 10.1109/cvpr.2019.00441 |
| [1] | 尹靖涵, 瞿绍军, 姚泽楷, 胡玄烨, 秦晓雨, 华璞靖. 基于YOLOv5的雾霾天气下交通标志识别模型[J]. 《计算机应用》唯一官方网站, 2022, 42(9): 2876-2884. |
| [2] | 魏海云, 郑茜颖, 俞金玲. 基于多尺度网络的运动模糊图像复原算法[J]. 《计算机应用》唯一官方网站, 2022, 42(9): 2838-2844. |
| [3] | 刘阳 陆志扬 王骏 施俊. 基于自注意力连接UNet的磁共振成像去吉布斯伪影算法[J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [4] | 朱周华 齐琦. 基于改进YOLOv5s电动车头盔的自动检测与识别[J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [5] | 王惠茹 李秀红 李哲 马春明 任泽裕 杨丹. 多模态预训练模型综述[J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [6] | 贾清玉 常亮 杨先一 强保华 张世豪 谢武 杨明浩. 面向机械臂操作的视觉信息实时重建方法[J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [7] | 李海丰 张凡 朴敏楠 王怀超 李南莎 桂仲成. 基于通道和空间注意力的机场道面地下目标自动检测[J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [8] | 尹丽华, 康亮, 朱文华. 融入时空显著性的高精度视频稳像算法[J]. 《计算机应用》唯一官方网站, 2022, 42(8): 2564-2570. |
| [9] | 张丽莹, 庞春江, 王新颖, 李国亮. 基于改进YOLOv3的多尺度目标检测算法[J]. 《计算机应用》唯一官方网站, 2022, 42(8): 2423-2431. |
| [10] | 王一宁, 赵青杉, 秦品乐, 胡玉兰, 宗春梅. 基于轻量密集神经网络的医学图像超分辨率重建算法[J]. 《计算机应用》唯一官方网站, 2022, 42(8): 2586-2592. |
| [11] | 唐鑫 彭博 滕飞. 基于状态信息的红外小目标跟踪方法[J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [12] | 申志军 穆丽娜 高静 史远航 刘志强. 细粒度图像分类综述[J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [13] | 刘辉 张琳玉 王复港 何如瑾. 基于注意力机制和上下文信息的目标检测算法[J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [14] | 张诗文, 邓春华, 张俊雯. 各向异性非极大值抑制在工业目标检测中的应用[J]. 《计算机应用》唯一官方网站, 2022, 42(7): 2210-2218. |
| [15] | 薛远亮, 金国栋, 谭力宁, 许剑锟. 基于像素分类的多尺度无人机航拍目标旋转跟踪算法[J]. 《计算机应用》唯一官方网站, 2022, 42(7): 2239-2247. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||