《计算机应用》唯一官方网站 ›› 2021, Vol. 41 ›› Issue (11): 3332-3336.DOI: 10.11772/j.issn.1001-9081.2021010021
Yusheng HU( ), Bingwei HE, Qingkang DENG
), Bingwei HE, Qingkang DENG
摘要:
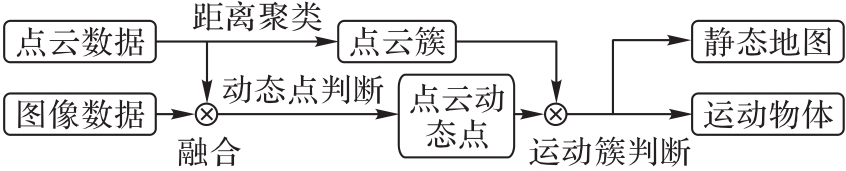
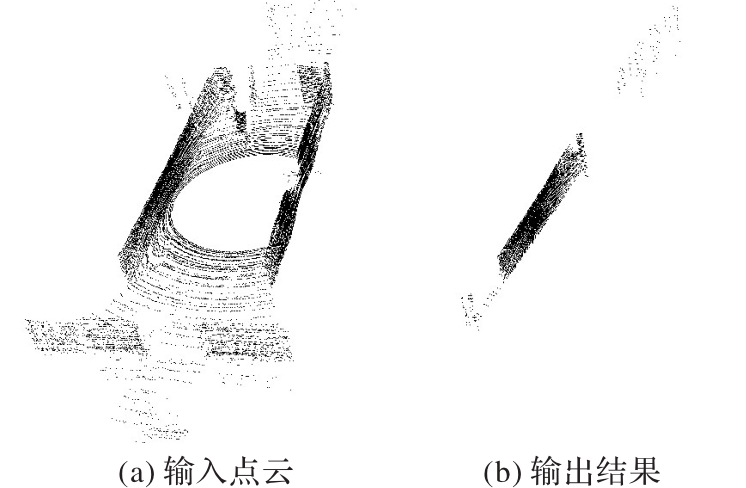
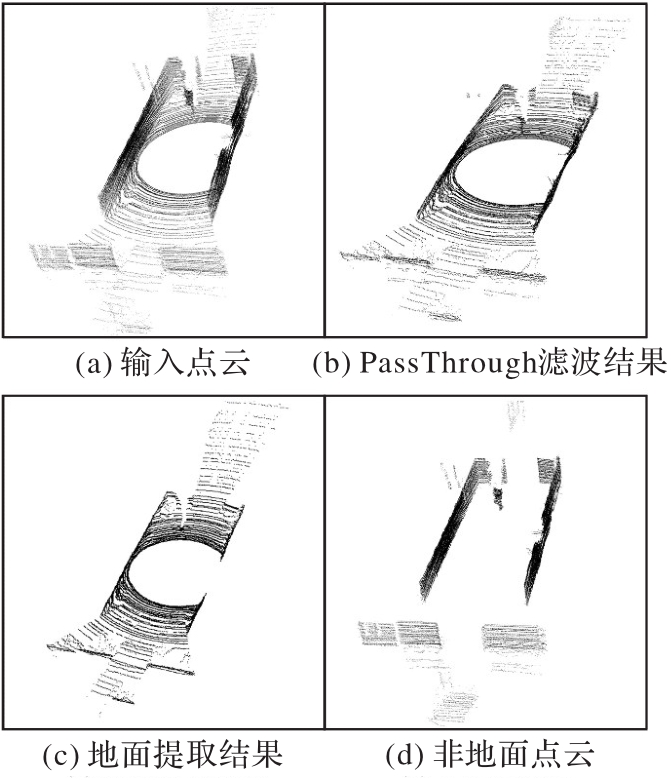
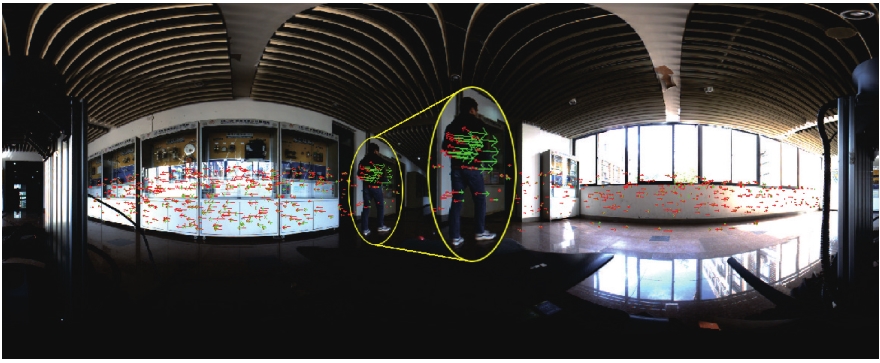
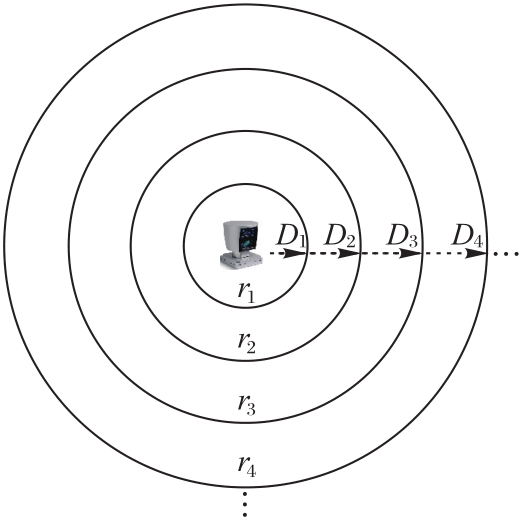
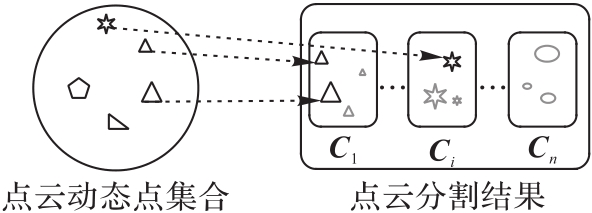
复杂动态背景环境下的运动物体检测和静态地图重建中容易出现运动物体检测不完整的问题。针对上述问题,提出了一种混合视觉系统下点云分割辅助的运动物体检测方法。首先,提出了直通滤波+随机采样一致性(PassThrough+RANSAC)方法来克服大面积墙壁干扰以实现点云地面点的识别;其次,将非地面点数据作为特征点投射到图像上,并估计其光流运动向量和人工运动向量,从而对动态点进行检测;然后,采用动态阈值策略对点云进行欧氏聚类;最后,整合动态点检测结果与点云分割结果来完整地提取出运动物体。此外,通过八叉树地图(Octomap)工具将点云地图转换为三维栅格地图以完成地图的构建。通过实验结果和数据分析可知,所提方法可以有效提高运动物体检测的完整性,同时重建出低损耗、高实用性的静态栅格地图。
中图分类号: