


《计算机应用》唯一官方网站 ›› 2022, Vol. 42 ›› Issue (3): 883-889.DOI: 10.11772/j.issn.1001-9081.2021030384
• 人工智能 • 上一篇
收稿日期:2021-03-15
修回日期:2021-06-22
接受日期:2021-06-23
发布日期:2022-04-09
出版日期:2022-03-10
通讯作者:
冒国韬
作者简介:邓天民(1979—),男,四川阆中人,副教授,博士,主要研究方向:交通大数据、交通环境感知基金资助:
Tianmin DENG, Guotao MAO( ), Zhenhao ZHOU, Zhijian DUAN
), Zhenhao ZHOU, Zhijian DUAN
Received:2021-03-15
Revised:2021-06-22
Accepted:2021-06-23
Online:2022-04-09
Published:2022-03-10
Contact:
Guotao MAO
About author:DENG Tianmin, born in 1979, Ph. D., associate professor. His research interests include traffic big data, traffic environment perception.Supported by:摘要:
针对现有道路车辆检测识别算法中存在的检测精度不高、实时性差以及小目标车辆漏检等问题,提出一种基于密集连接卷积神经网络的道路车辆检测与识别算法。首先,基于YOLOv4网络框架,通过采用密集连接的深度残差网络结构,加强特征提取阶段的特征复用,实现对浅层复杂度较低的特征的利用;然后,在多尺度特征融合网络引入跳跃连接结构,强化网络的特征信息融合和表征能力,以降低车辆漏检率;最后,采用维度聚类算法重新计算先验框尺寸,并按照合理的策略分配给不同检测尺度。实验结果表明,该算法在KITTI数据集上获得了98.21%的检测精度和48.05 frame/s的检测速度,对于BDD100K数据集中复杂恶劣环境中的车辆也有较好的检测效果,在满足实时检测要求的同时有效提升检测精度。
中图分类号:
邓天民, 冒国韬, 周臻浩, 段志坚. 基于密集连接卷积神经网络的道路车辆检测与识别算法[J]. 计算机应用, 2022, 42(3): 883-889.
Tianmin DENG, Guotao MAO, Zhenhao ZHOU, Zhijian DUAN. Road vehicle detection and recognition algorithm based on densely connected convolutional neural network[J]. Journal of Computer Applications, 2022, 42(3): 883-889.

图1 残差模块结构
Fig. 1 Residual block structure
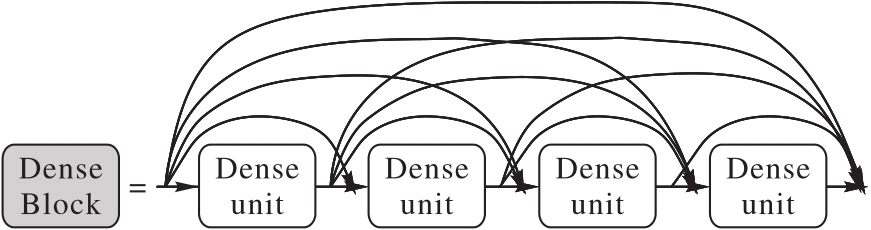
图2 DenseNet密集连接结构
Fig. 2 Dense connected structure of DenseNet
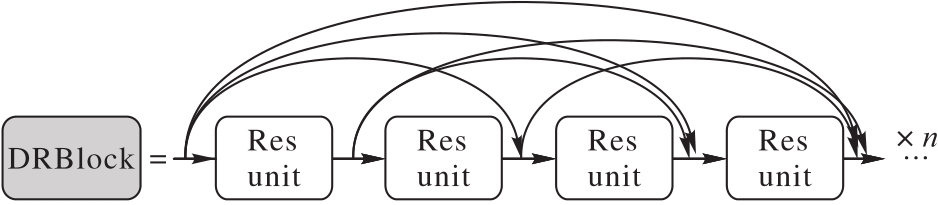
图3 DRNet结构
Fig. 3 Structure of DRNet

图4 三种不同的CSPBlock
Fig. 4 Three types of CSPBlock
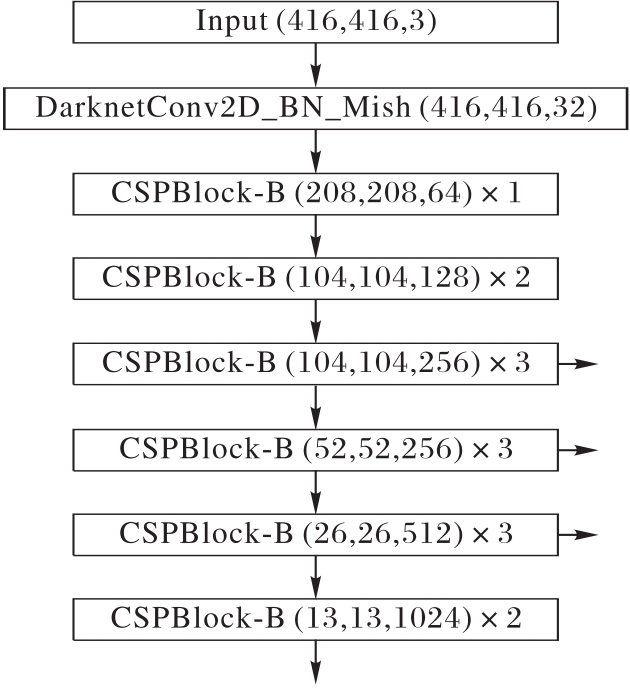
图5 CSPDRNet53结构
Fig. 5 Structure of CSPDRNet53
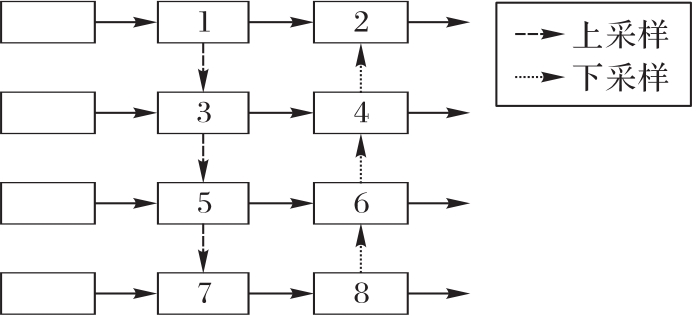
图6 PANet结构
Fig. 6 Structure of PANet
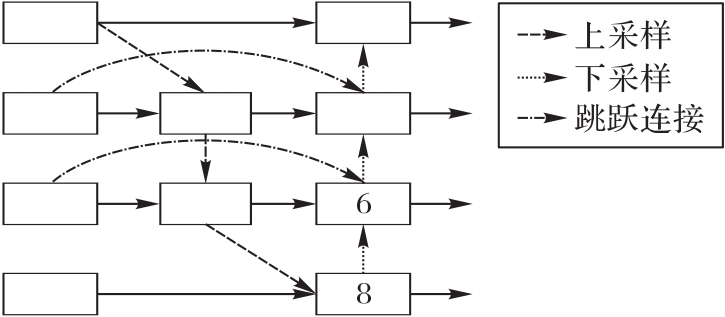
图7 引入跳跃连接结构的特征融合网络
Fig. 7 Feature fusion network introduced by skip connection structure
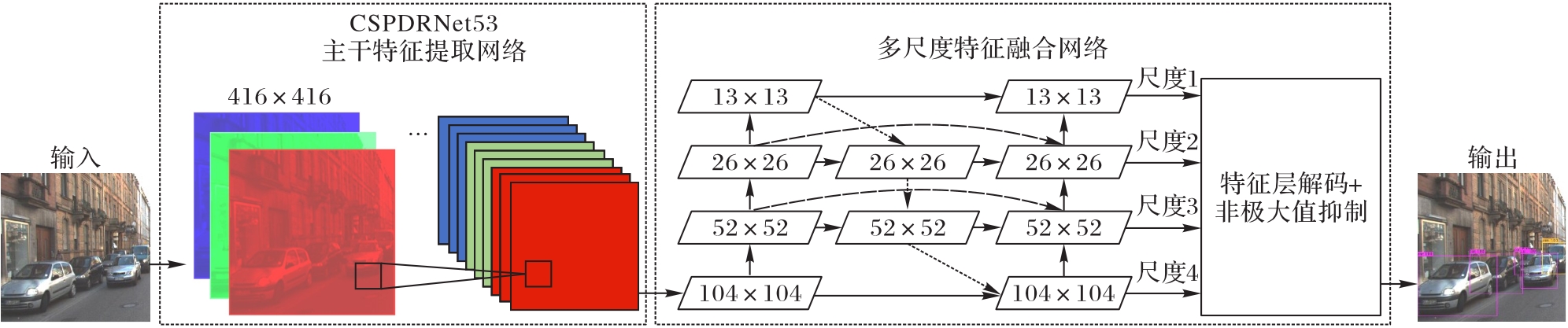
图8 提出的DR-YOLOv4算法结构
Fig. 8 Structure of proposed DR-YOLOv4 algorithm

图9 部分样本示意图
Fig. 9 Schematic diagram of partial samples
| 网络结构 | mAP/% | 检测速度/(frame·s-1) |
|---|---|---|
| YOLOv4 | 97.41 | 45.72 |
| YOLOv4+密集连接 | 97.89 | 40.35 |
| YOLOv4+跨层连接 | 97.35 | 46.41 |
| YOLOv4+深度残差 | 96.44 | 55.92 |
| DR-YOLOv4特征提取网络 | 96.93 | 51.39 |
表1 不同特征提取网络对模型性能影响对比
Tab. 1 Influence comparison of different feature extraction networks on model performance
| 网络结构 | mAP/% | 检测速度/(frame·s-1) |
|---|---|---|
| YOLOv4 | 97.41 | 45.72 |
| YOLOv4+密集连接 | 97.89 | 40.35 |
| YOLOv4+跨层连接 | 97.35 | 46.41 |
| YOLOv4+深度残差 | 96.44 | 55.92 |
| DR-YOLOv4特征提取网络 | 96.93 | 51.39 |
| 网络结构 | mAP/% | 检测速度/(frame·s-1) |
|---|---|---|
| YOLOv4 | 97.41 | 45.72 |
| YOLOv4+跳跃连接 | 97.47 | 45.39 |
| YOLOv4+多尺度特征检测 | 97.98 | 39.87 |
| DR-YOLOv4特征融合网络 | 98.09 | 39.68 |
表2 不同特征融合网络对模型性能影响对比
Tab. 2 Influence comparison of different feature fusion networks on model performance
| 网络结构 | mAP/% | 检测速度/(frame·s-1) |
|---|---|---|
| YOLOv4 | 97.41 | 45.72 |
| YOLOv4+跳跃连接 | 97.47 | 45.39 |
| YOLOv4+多尺度特征检测 | 97.98 | 39.87 |
| DR-YOLOv4特征融合网络 | 98.09 | 39.68 |
13×13 特征图 | 26×26 特征图 | 52×52 特征图 | 104×104 特征图 | mAP/% | 检测速度/ (frame·s-1) |
|---|---|---|---|---|---|
| 3 | 3 | 3 | 3 | 98.09 | 39.68 |
| 2 | 4 | 3 | 3 | 98.25 | 41.83 |
| 2 | 3 | 4 | 3 | 98.27 | 42.51 |
| 4 | 2 | 2 | 4 | 98.01 | 39.14 |
| 2 | 4 | 4 | 2 | 98.19 | 40.63 |
| 1 | 3 | 4 | 4 | 98.13 | 39.64 |
| 4 | 4 | 2 | 2 | 97.96 | 37.92 |
表3 不同先验框分配策略对模型性能影响对比
Tab. 3 Influence comparison of different anchor allocation strategies on model performance
13×13 特征图 | 26×26 特征图 | 52×52 特征图 | 104×104 特征图 | mAP/% | 检测速度/ (frame·s-1) |
|---|---|---|---|---|---|
| 3 | 3 | 3 | 3 | 98.09 | 39.68 |
| 2 | 4 | 3 | 3 | 98.25 | 41.83 |
| 2 | 3 | 4 | 3 | 98.27 | 42.51 |
| 4 | 2 | 2 | 4 | 98.01 | 39.14 |
| 2 | 4 | 4 | 2 | 98.19 | 40.63 |
| 1 | 3 | 4 | 4 | 98.13 | 39.64 |
| 4 | 4 | 2 | 2 | 97.96 | 37.92 |
| 实验序号 | 特征提取 网络改进 | 特征融合 网络改进 | 先验框 聚类与分配 | 各类别AP/% | mAP/% | 检测速度/ (frame·s-1) | ||
|---|---|---|---|---|---|---|---|---|
| Car | Van | Truck | ||||||
| A | ○ | ○ | ○ | 95.68 | 97.72 | 98.83 | 97.41 | 45.72 |
| B | ● | ○ | ○ | 95.22 | 97.23 | 98.35 | 96.93 | 51.39 |
| C | ○ | ● | ○ | 97.09 | 98.23 | 98.94 | 98.09 | 39.68 |
| D | ○ | ○ | ● | 96.60 | 98.37 | 98.92 | 97.96 | 48.54 |
| E | ● | ● | ○ | 96.69 | 97.76 | 98.49 | 97.65 | 46.17 |
| F | ○ | ● | ● | 98.08 | 98.91 | 99.09 | 98.69 | 41.88 |
| G | ● | ○ | ● | 96.17 | 97.89 | 98.45 | 97.50 | 53.92 |
| H | ● | ● | ● | 97.48 | 98.51 | 98.65 | 98.21 | 48.05 |
表4 不同实验方案对模型性能影响分析
Tab. 4 Analysis of influence of different experimental schemes on model performance
| 实验序号 | 特征提取 网络改进 | 特征融合 网络改进 | 先验框 聚类与分配 | 各类别AP/% | mAP/% | 检测速度/ (frame·s-1) | ||
|---|---|---|---|---|---|---|---|---|
| Car | Van | Truck | ||||||
| A | ○ | ○ | ○ | 95.68 | 97.72 | 98.83 | 97.41 | 45.72 |
| B | ● | ○ | ○ | 95.22 | 97.23 | 98.35 | 96.93 | 51.39 |
| C | ○ | ● | ○ | 97.09 | 98.23 | 98.94 | 98.09 | 39.68 |
| D | ○ | ○ | ● | 96.60 | 98.37 | 98.92 | 97.96 | 48.54 |
| E | ● | ● | ○ | 96.69 | 97.76 | 98.49 | 97.65 | 46.17 |
| F | ○ | ● | ● | 98.08 | 98.91 | 99.09 | 98.69 | 41.88 |
| G | ● | ○ | ● | 96.17 | 97.89 | 98.45 | 97.50 | 53.92 |
| H | ● | ● | ● | 97.48 | 98.51 | 98.65 | 98.21 | 48.05 |

图10 本文算法平均损失收敛曲线
Fig. 10 Average loss convergence curve of proposed algorithm
| 模型 | 各类别AP/% | mAP/% | 检测速度/(frames·s-1) | ||
|---|---|---|---|---|---|
| Car | Van | Truck | |||
| Faster R-CNN | 78.25 | 72.93 | 80.09 | 77.09 | 12.47 |
| SSD300 | 81.59 | 74.82 | 87.36 | 81.26 | 56.71 |
| SSD512 | 84.81 | 70.72 | 82.98 | 79.50 | 26.24 |
| YOLOv3 | 90.53 | 92.39 | 94.87 | 92.60 | 47.91 |
| YOLOv4 | 95.68 | 97.72 | 98.83 | 97.41 | 45.72 |
| DR-YOLOv4 | 97.48 | 98.51 | 98.65 | 98.21 | 48.05 |
表5 不同目标检测模型在KITTI数据集上效果对比
Tab. 5 Comparison of effects of different target detection models on KITTI dataset
| 模型 | 各类别AP/% | mAP/% | 检测速度/(frames·s-1) | ||
|---|---|---|---|---|---|
| Car | Van | Truck | |||
| Faster R-CNN | 78.25 | 72.93 | 80.09 | 77.09 | 12.47 |
| SSD300 | 81.59 | 74.82 | 87.36 | 81.26 | 56.71 |
| SSD512 | 84.81 | 70.72 | 82.98 | 79.50 | 26.24 |
| YOLOv3 | 90.53 | 92.39 | 94.87 | 92.60 | 47.91 |
| YOLOv4 | 95.68 | 97.72 | 98.83 | 97.41 | 45.72 |
| DR-YOLOv4 | 97.48 | 98.51 | 98.65 | 98.21 | 48.05 |
| 模型 | 各类别AP/% | mAP/% | 检测速度/ (frames·s-1) | ||
|---|---|---|---|---|---|
| Car | Bus | Truck | |||
| YOLOv4 | 61.35 | 56.92 | 53.71 | 57.32 | 41.26 |
| DR-YOLOv4 | 62.23 | 58.07 | 54.42 | 58.24 | 43.50 |
表6 模型改进前后在BDD100K数据集上测试结果
Tab. 6 Test results on BDD100K dataset before and after model improvement
| 模型 | 各类别AP/% | mAP/% | 检测速度/ (frames·s-1) | ||
|---|---|---|---|---|---|
| Car | Bus | Truck | |||
| YOLOv4 | 61.35 | 56.92 | 53.71 | 57.32 | 41.26 |
| DR-YOLOv4 | 62.23 | 58.07 | 54.42 | 58.24 | 43.50 |
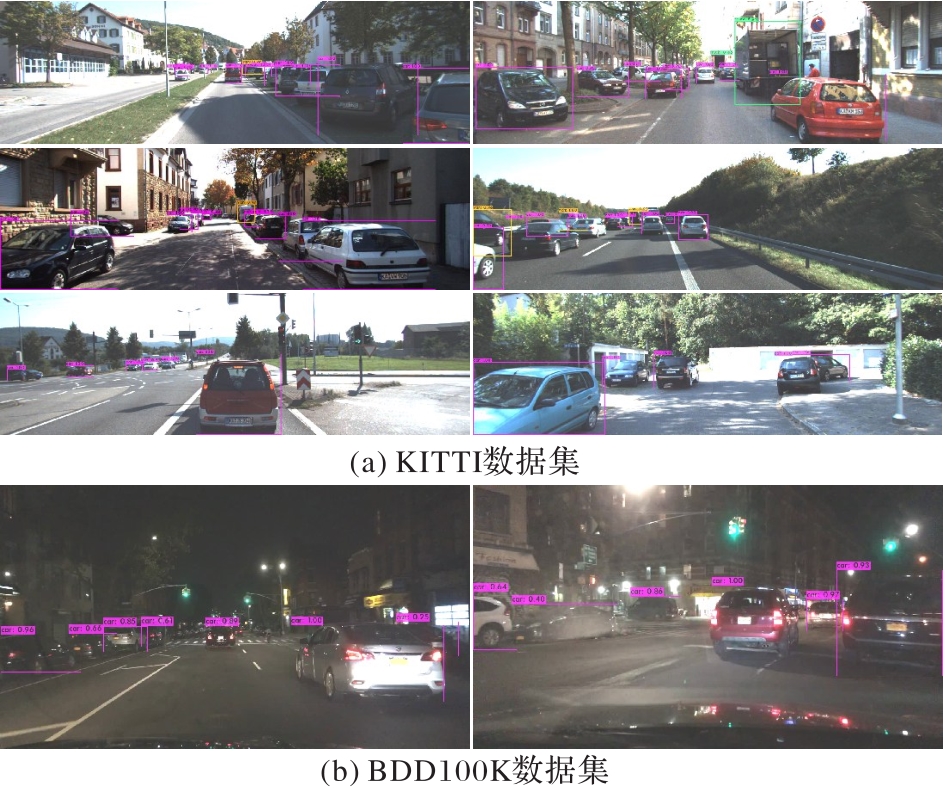
图11 部分检测结果示意图
Fig. 11 Partial schematic diagram of test results
| 1 | 张新钰, 高洪波, 赵建辉, 等.基于深度学习的自动驾驶技术综述[J].清华大学学报(自然科学版), 2018, 58(4):438-444. 10.16511/j.cnki.qhdxxb.2018.21.010 |
| ZHANG X Y, GAO H B, ZHAO J H, et al. Overview of deep learning intelligent driving methods [J]. Journal of Tsinghua University (Science and Technology), 2018, 58(4):438-444. 10.16511/j.cnki.qhdxxb.2018.21.010 | |
| 2 | KRIZHEVSKY A, SUTSKEVER I, HINTON G E. ImageNet classification with deep convolutional neural networks [J]. Communication of the ACM, 2017, 60(6): 84-90. 10.1145/3065386 |
| 3 | GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation [C]// Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2014: 580-587. 10.1109/cvpr.2014.81 |
| 4 | GIRSHICK R. Fast R-CNN [C]// Proceedings of the 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2015: 1440-1448. 10.1109/iccv.2015.169 |
| 5 | REN S, HE K, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 39(6):1137-1149. |
| 6 | NGUYEN H. Improving faster R-CNN framework for fast vehicle detection [J]. Mathematical Problems in Engineering, 2019,2019: 1-11. 10.1155/2019/3808064 |
| 7 | 杨薇, 王洪元, 张继, 等. 一种基于Faster-RCNN的车辆实时检测改进算法[J]. 南京大学学报(自然科学版), 2019, 55(2): 231-237. 10.13232/j.cnki.jnju.2019.02.008 |
| YANG W, WANG H Y, ZHANG J, et al. An improved vehicle real-time detection algorithm based on Faster-RCNN [J]. Journal of Nanjing University (Natural Science), 2019, 55(2): 231-237. 10.13232/j.cnki.jnju.2019.02.008 | |
| 8 | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection [C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 779-788. 10.1109/cvpr.2016.91 |
| 9 | 李珣, 刘瑶, 李鹏飞,等. 基Darknet框架下YOLOv2算法的车辆多目标检测方法[J]. 交通运输工程学报, 2018, 18(6): 146-162. 10.1155/2018/7075814 |
| LI X, LIU Y, LI P F, et al. Vehicle multitarget detection method based on YOLOv2 algorithm under Darknet framework [J]. Journal of Traffic and Transportation Engineering, 2018, 18(6): 146-162. 10.1155/2018/7075814 | |
| 10 | REDMON J, FARHADI A. YOLOv3: an incremental improvement [EB/OL]. [2019-12-15]. . 10.1145/3429945 |
| 11 | BOCHKOVSKIY A, WANG C Y, LIAO H Y M. YOLOv4: optimal speed and accuracy of object detection [EB/OL]. [2020-04-23]. . 10.1109/cvpr46437.2021.01283 |
| 12 | LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot multibox detector [C]// Proceedings of the 2016 European Conference on Computer Vision. Cham: Springer, 2016: 21-37. 10.1007/978-3-319-46448-0_2 |
| 13 | WANG X, WANG S, CAO J, et al. Data-driven based tiny-YOLOv3 method for front vehicle detection inducing SPP-net [J]. IEEE Access, 2020, 8: 110227-110236. 10.1109/access.2020.3001279 |
| 14 | 赵文清, 周震东, 翟永杰. 基于反卷积和特征融合的SSD小目标检测算法[J]. 智能系统学报, 2020, 15(2): 310-316. 10.11992/tis.201905035 |
| ZHAO W Q, ZHOU Z D, ZHAI Y J. SSD small target detection algorithm based on deconvolution and feature fusion [J]. CAAI Transactions on Intelligent Systems, 2020,15(2):310-316. 10.11992/tis.201905035 | |
| 15 | WANG C Y, LIAO H Y M, WU Y H, et al. CSPNet: a new backbone that can enhance learning capability of CNN [C]// Proceedings of the 2020 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 390-391. 10.1109/cvprw50498.2020.00203 |
| 16 | HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition [C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 770-778. 10.1109/cvpr.2016.90 |
| 17 | HUANG G, LIU Z, LAURENS V D M, et al. Densely connected convolutional networks [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 4700-4708. 10.1109/cvpr.2017.243 |
| 18 | LIU S, QI L, QIN H, et al. Path aggregation network for instance segmentation [C]// Proceedings of the 2018 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 8759-8768. 10.1109/cvpr.2018.00913 |
| 19 | ARTHUR D, VASSILVITSKII S. K-Means++: the advantages of careful seeding [C]// Proceedings of the 8th Annual ACM-SIAM Symposium on Discrete algorithms. Stroudsburg, PA: Association for Computational Linguistics, 2007: 1027-1035. |
| 20 | REDMON J. Darknet: open source neural networks in C [EB/OL]. [2019-07-15]. . |
| 21 | GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving? The KITTI vision benchmark suite [C]// Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2012: 3354-3361. 10.1109/cvpr.2012.6248074 |
| 22 | YU F, CHEN H, WANG X, et al. BDD 100K: a diverse driving video database with scalable annotation tooling [EB/OL]. [2020-01-15]. . |
| [1] | 谭兆一, 陈白帆. 基于坐标逆映射的增强型车辆三维全景影像[J]. 计算机应用, 2021, 41(4): 1165-1171. |
| [2] | 徐婉晴, 王保栋, 黄艺美, 李金屏. 基于人体骨骼关键点的吸烟行为检测算法[J]. 《计算机应用》唯一官方网站, 2021, 41(12): 3602-3607. |
| [3] | 楼豪杰, 郑元林, 廖开阳, 雷浩, 李佳. 基于Siamese-YOLOv4的印刷品缺陷目标检测[J]. 《计算机应用》唯一官方网站, 2021, 41(11): 3206-3212. |
| [4] | 高建, 毛莺池, 李志涛. 基于高斯混合时间序列模型的轨迹预测[J]. 计算机应用, 2019, 39(8): 2261-2270. |
| [5] | 陈龙杰, 张钰, 张玉梅, 吴晓军. 基于多注意力多尺度特征融合的图像描述生成算法[J]. 计算机应用, 2019, 39(2): 354-359. |
| [6] | 陈珂. 用于视频中车速自动检测的摄像机自动标定方法[J]. 计算机应用, 2017, 37(8): 2307-2312. |
| [7] | 徐晓伟, 杜一, 周园春. 基于多源出行数据的居民行为模式分析方法[J]. 计算机应用, 2017, 37(8): 2362-2367. |
| [8] | 郑林江, 刘旭, 易兵. 考虑时空特性的动态权重实时地图匹配算法[J]. 计算机应用, 2017, 37(8): 2381-2386. |
| [9] | 戚欣, 梁伟涛, 马勇. 基于出租车轨迹数据的最优路径规划方法[J]. 计算机应用, 2017, 37(7): 2106-2113. |
| [10] | 董峻妃, 郑伯川, 杨泽静. 基于卷积神经网络的车牌字符识别[J]. 计算机应用, 2017, 37(7): 2014-2018. |
| [11] | 张军, 胡震波, 朱新山. 基于AdaBoost分类器的实时交通事故预测[J]. 计算机应用, 2017, 37(1): 284-288. |
| [12] | 甘玲, 李瑞. 基于自适应虚拟线圈的多车道车流量检测算法[J]. 计算机应用, 2016, 36(12): 3511-3514. |
| [13] | 寇兰, 杨立娜, 刘科征, 胡敏, 毛一丁. 基于城市公共交通移动模型的协作延迟容忍网络路由策略[J]. 计算机应用, 2016, 36(11): 3021-3027. |
| [14] | 任鹏飞, 秦贵和, 董劲男, 李滨, 郑啸天. 具有交通规则约束的改进Dijkstra算法[J]. 计算机应用, 2015, 35(9): 2503-2507. |
| [15] | 曹波, 韩燕波, 王桂玲. 基于车牌识别大数据的伴随车辆组发现方法[J]. 计算机应用, 2015, 35(11): 3203-3207. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||