


Journal of Computer Applications ›› 2023, Vol. 43 ›› Issue (3): 962-971.DOI: 10.11772/j.issn.1001-9081.2022010037
• Frontier and comprehensive applications • Previous Articles
Xianbojun FAN1, Lijia CHEN1( ), Shen LI2, Chenlu WANG1, Min WANG1, Zan WANG1, Mingguo LIU1
), Shen LI2, Chenlu WANG1, Min WANG1, Zan WANG1, Mingguo LIU1
Received:2022-01-13
Revised:2022-03-14
Accepted:2022-03-22
Online:2022-04-14
Published:2023-03-10
Contact:
Lijia CHEN
About author:FAN Xianbojun, born in 1994, M. S. candidate. His research interests include swarm intelligence algorithm.Supported by:
范贤博俊1, 陈立家1(), 李珅2, 王晨露1, 王敏1, 王赞1, 刘名果1
通讯作者:
陈立家
作者简介:范贤博俊(1994—),男,河南义马人,硕士研究生,主要研究方向:群智能算法基金资助:CLC Number:
Xianbojun FAN, Lijia CHEN, Shen LI, Chenlu WANG, Min WANG, Zan WANG, Mingguo LIU. Robust joint modeling and optimization method for visual manipulators[J]. Journal of Computer Applications, 2023, 43(3): 962-971.
范贤博俊, 陈立家, 李珅, 王晨露, 王敏, 王赞, 刘名果. 鲁棒的视觉机械臂联合建模优化方法[J]. 《计算机应用》唯一官方网站, 2023, 43(3): 962-971.
Add to citation manager EndNote|Ris|BibTeX
URL: http://www.joca.cn/EN/10.11772/j.issn.1001-9081.2022010037
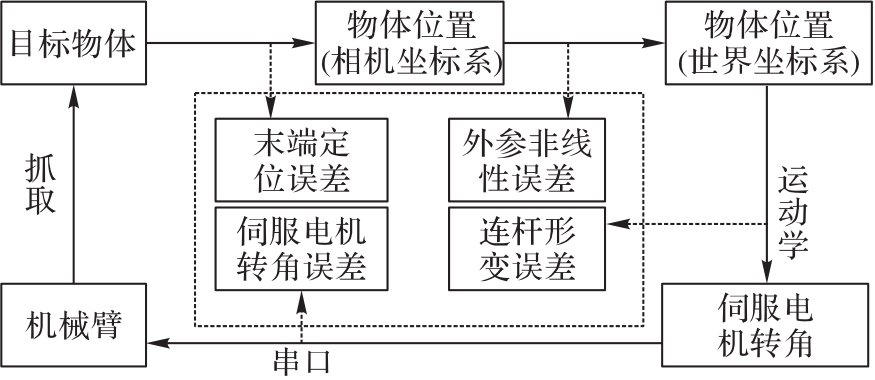
Fig.1 Grab process of visual manipulator system
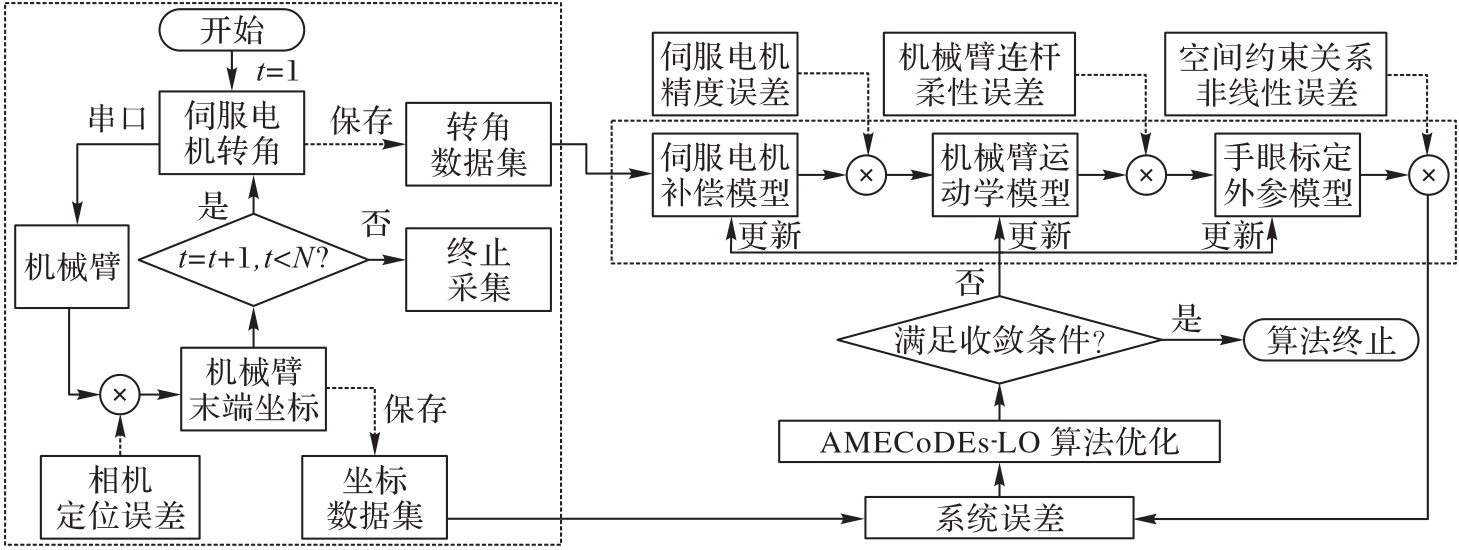
Fig.2 Overall system optimization strategy
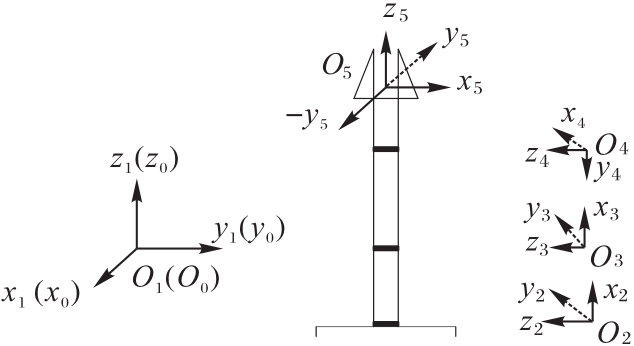
Fig.3 Joint coordinate system

Fig.4 Individual coding structure of AMECoDEs-LO

Fig.5 Switching between three optimization states
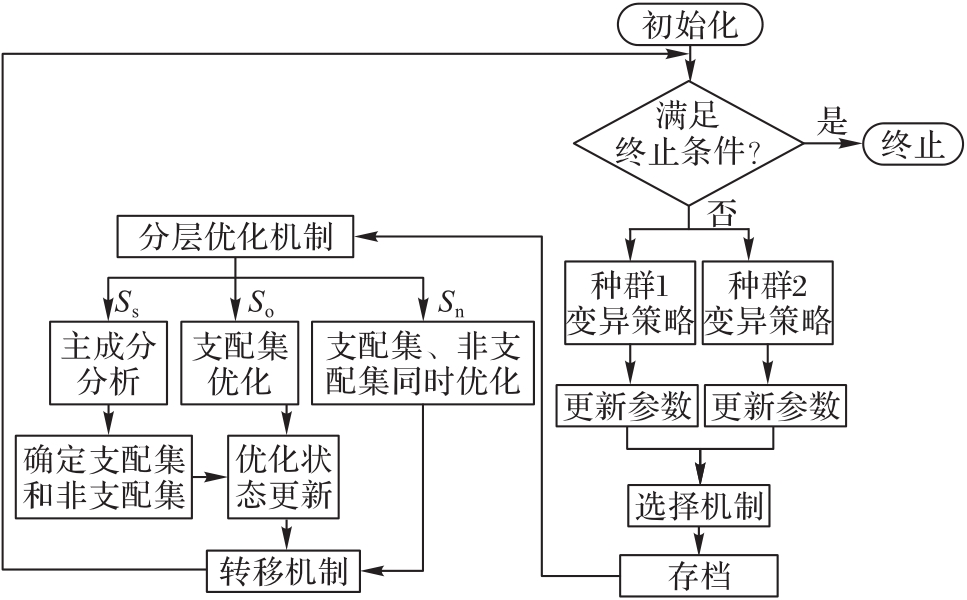
Fig.6 Flowchart of AMECoDEs-LO
| 编码类型 | 维度 | 配置 |
|---|---|---|
| Type 0 | 20 | |
| Type 1 | 20 | |
| Type 2 | 26 | |
| Type 3 | 26 | |
| Type 4 | 41 |
Tab.1 Five individual configurations
| 编码类型 | 维度 | 配置 |
|---|---|---|
| Type 0 | 20 | |
| Type 1 | 20 | |
| Type 2 | 26 | |
| Type 3 | 26 | |
| Type 4 | 41 |
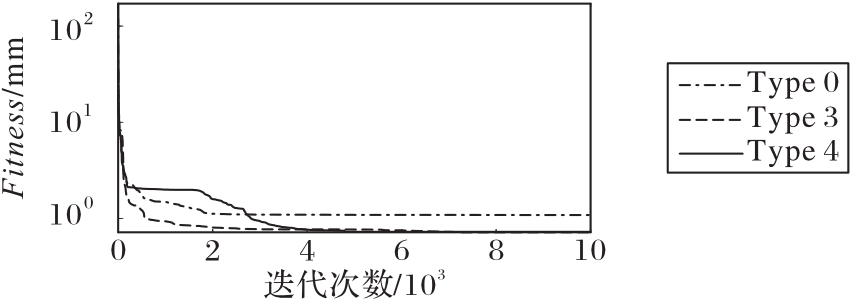
Fig.7 Convergence of three individual configurations under normal manipulator environment
| 编码类型 | 迭代次数 | 收敛时间/s | Fitness/mm |
|---|---|---|---|
| Type 0 | 2 137 | 39 | 1.086 935 |
| Type 3 | 4 948 | 92 | 0.718 967 |
| Type 4 | 7 679 | 145 | 0.726 831 |
Tab.2 Individual configuration under normal manipulator environment
| 编码类型 | 迭代次数 | 收敛时间/s | Fitness/mm |
|---|---|---|---|
| Type 0 | 2 137 | 39 | 1.086 935 |
| Type 3 | 4 948 | 92 | 0.718 967 |
| Type 4 | 7 679 | 145 | 0.726 831 |
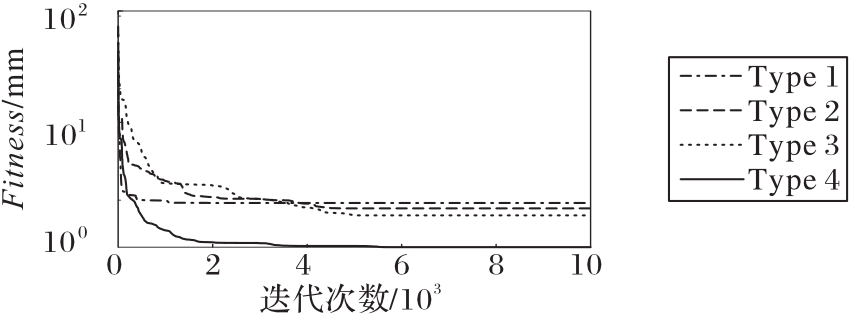
Fig.8 Convergence of four individual configurations under broken manipulator environment
| 编码类型 | 迭代次数 | 收敛时间/s | Fitness/mm |
|---|---|---|---|
| Type 1 | 1 944 | 37 | 1.886 338 |
| Type 2 | 4 758 | 88 | 1.685 230 |
| Type 3 | 4 988 | 93 | 1.458 970 |
| Type 4 | 7 835 | 149 | 0.755 262 |
Tab.3 Individual configurations under broken manipulator environment
| 编码类型 | 迭代次数 | 收敛时间/s | Fitness/mm |
|---|---|---|---|
| Type 1 | 1 944 | 37 | 1.886 338 |
| Type 2 | 4 758 | 88 | 1.685 230 |
| Type 3 | 4 988 | 93 | 1.458 970 |
| Type 4 | 7 835 | 149 | 0.755 262 |
| 趋平率阈值 | 切换率阈值 | 迭代次数 | Fitness/mm |
|---|---|---|---|
| 0.95 | 0.50 | 14 194 | 0.740 816 |
| 0.98 | 0.50 | 39 418 | 0.750 376 |
| 0.90 | 0.50 | 7 835 | 0.755 262 |
| 0.55 | 6 547 | 0.812 778 | |
| 0.60 | 6 072 | 0.881 793 | |
| 0.85 | 0.50 | 5 768 | 0.898 836 |
| 0.55 | 5 373 | 0.916 278 | |
| 0.60 | 5 174 | 1.361 520 | |
| 0.75 | 0.50 | 3 726 | 1.232 095 |
| 0.55 | 3 169 | 1.391 849 | |
| 0.60 | 2 479 | 1.513 099 |
Tab.4 Different combinations of two parameters
| 趋平率阈值 | 切换率阈值 | 迭代次数 | Fitness/mm |
|---|---|---|---|
| 0.95 | 0.50 | 14 194 | 0.740 816 |
| 0.98 | 0.50 | 39 418 | 0.750 376 |
| 0.90 | 0.50 | 7 835 | 0.755 262 |
| 0.55 | 6 547 | 0.812 778 | |
| 0.60 | 6 072 | 0.881 793 | |
| 0.85 | 0.50 | 5 768 | 0.898 836 |
| 0.55 | 5 373 | 0.916 278 | |
| 0.60 | 5 174 | 1.361 520 | |
| 0.75 | 0.50 | 3 726 | 1.232 095 |
| 0.55 | 3 169 | 1.391 849 | |
| 0.60 | 2 479 | 1.513 099 |
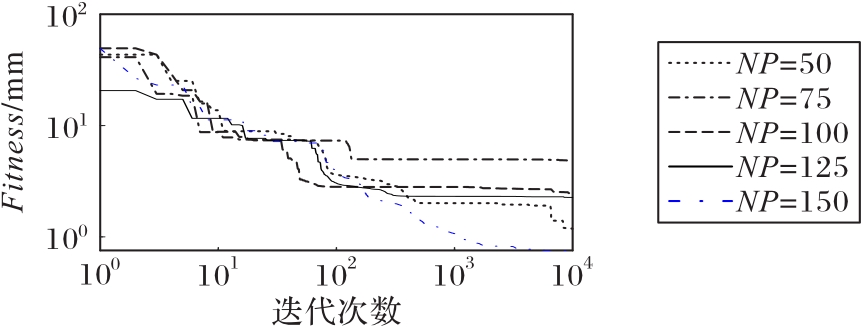
Fig.9 Comparison of fitness in populations with different scales

Fig.10 Performance of AMECoDEs-LO
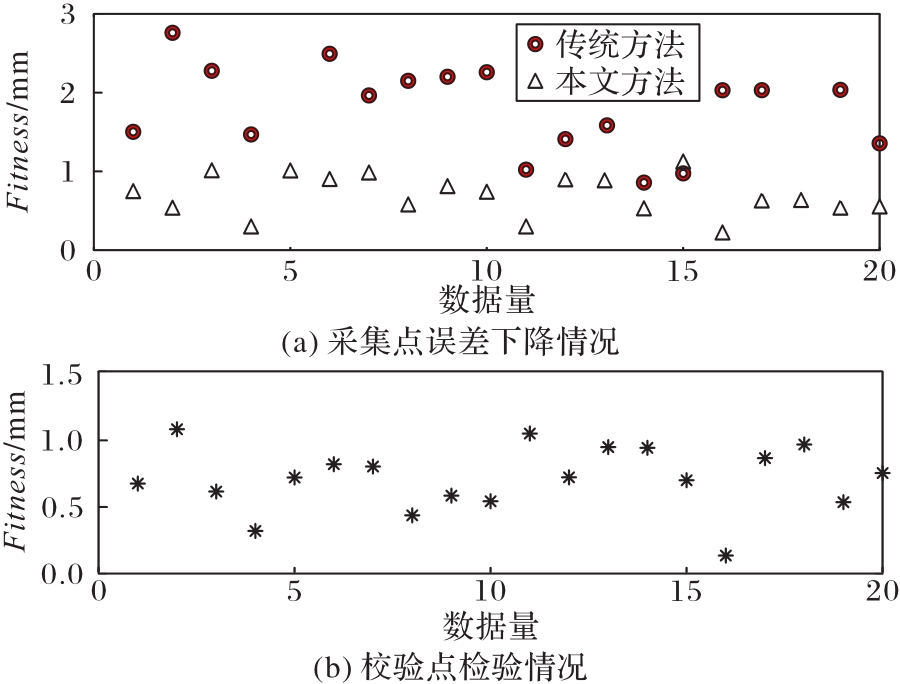
Fig.11 Accuracy verification comparison between joint system and traditional method

Fig.12 Performance of servo motor soft compensation
| 方案 | RSS | MAE | RMSE | SD |
|---|---|---|---|---|
| f1(x) | 54.932 | 0.609 | 0.741 | 0.422 |
| f2(x) | 14.248 | 0.281 | 0.377 | 0.252 |
| f3(x) | 11.727 | 0.265 | 0.342 | 0.217 |
Tab.5 Results of three schemes on different indexes
| 方案 | RSS | MAE | RMSE | SD |
|---|---|---|---|---|
| f1(x) | 54.932 | 0.609 | 0.741 | 0.422 |
| f2(x) | 14.248 | 0.281 | 0.377 | 0.252 |
| f3(x) | 11.727 | 0.265 | 0.342 | 0.217 |

Fig.13 Four different data collection areas
| 采集点数 | 机械臂 | 迭代次数 | 不同算法下的Fitness/mm | ||||||
|---|---|---|---|---|---|---|---|---|---|
| AMECoDEs-LO | AMECoDEs | PSO | GA | DE | IMPEDE | DESPS | |||
| 25 | R1 | 5 000 | 0.565 326 | 0.982 446 | 0.830 997 | 2.561 803 | 1.786 521 | 1.177 729 | 1.355 992 |
| 10 000 | 0.532 048 | 0.719 843 | 0.770 335 | 2.057 273 | 1.237 504 | 0.969 473 | 0.765 316 | ||
| 20 000 | 0.532 048 | 0.520 238 | 0.770 335 | 2.005 239 | 1.031 816 | 0.901 608 | 0.591 952 | ||
| R2 | 5 000 | 0.586 456 | 0.601 693 | 0.876 969 | 1.911 315 | 1.779 222 | 1.437 815 | 0.635 495 | |
| 10 000 | 0.585 898 | 0.573 826 | 0.741 698 | 1.852 563 | 1.092 410 | 1.135 834 | 0.599 992 | ||
| 20 000 | 0.585 463 | 0.568 397 | 0.718 350 | 1.787 653 | 1.086 331 | 0.872 544 | 0.599 821 | ||
| 50 | R1 | 5 000 | 0.726 315 | 1.148 595 | 1.870 231 | 3.041 135 | 1.593 779 | 0.744 047 | 2.842 765 |
| 10 000 | 0.716 056 | 0.980 794 | 1.683 181 | 2.551 561 | 1.517 333 | 0.668 578 | 2.753 945 | ||
| 20 000 | 0.677 934 | 0.744 180 | 1.644 061 | 2.550 204 | 1.329 803 | 0.665 560 | 0.933 366 | ||
| R2 | 5 000 | 0.664 622 | 1.983 563 | 1.975 506 | 3.164 919 | 2.273 540 | 0.665 486 | 2.731 112 | |
| 10 000 | 0.656 657 | 1.433 057 | 1.700 505 | 2.823 198 | 2.117 706 | 0.659 641 | 1.134 591 | ||
| 20 000 | 0.650 878 | 0.767 033 | 1.698 549 | 2.432 036 | 1.367 968 | 0.630 471 | 0.942 106 | ||
| 75 | R1 | 5 000 | 0.689 986 | 0.733 063 | 1.823 818 | 5.371 781 | 1.091 436 | 0.826 387 | 1.079 996 |
| 10 000 | 0.689 852 | 0.733 061 | 1.800 903 | 3.579 188 | 1.086 935 | 0.794 721 | 1.042 488 | ||
| 20 000 | 0.689 852 | 0.733 061 | 1.710 061 | 2.822 724 | 1.086 787 | 0.786 419 | 0.947 404 | ||
| R2 | 5 000 | 0.715 865 | 0.791 578 | 2.052 678 | 3.245 265 | 1.121 884 | 1.249 125 | 1.657 453 | |
| 10 000 | 0.690 582 | 0.707 336 | 1.832 811 | 3.087 309 | 1.121 884 | 1.161 167 | 1.158 240 | ||
| 20 000 | 0.689 395 | 0.707 065 | 1.690 035 | 2.948 902 | 1.121 884 | 0.799 485 | 0.983 625 | ||
| 100 | R1 | 5 000 | 0.774 702 | 1.172 915 | 3.391 321 | 2.591 554 | 1.719 753 | 1.893 676 | 2.185 051 |
| 10 000 | 0.755 262 | 0.798 311 | 2.135 919 | 2.423 959 | 1.594 458 | 1.797 107 | 1.613 516 | ||
| 20 000 | 0.755 262 | 0.798 311 | 1.484 260 | 2.423 633 | 1.511 633 | 1.162 780 | 1.336 374 | ||
| R2 | 5 000 | 0.767 045 | 0.850 048 | 1.590 780 | 2.787 817 | 2.201 815 | 2.319 529 | 2.590 174 | |
| 10 000 | 0.738 244 | 0.806 822 | 1.470 112 | 2.363 048 | 1.686 311 | 1.276 485 | 1.880 933 | ||
| 20 000 | 0.738 244 | 0.806 822 | 1.467 441 | 2.360 980 | 1.576 970 | 1.159 064 | 1.347 907 | ||
Tab.6 Fitness comparison of two manipulators under seven algorithms in four collection areas
| 采集点数 | 机械臂 | 迭代次数 | 不同算法下的Fitness/mm | ||||||
|---|---|---|---|---|---|---|---|---|---|
| AMECoDEs-LO | AMECoDEs | PSO | GA | DE | IMPEDE | DESPS | |||
| 25 | R1 | 5 000 | 0.565 326 | 0.982 446 | 0.830 997 | 2.561 803 | 1.786 521 | 1.177 729 | 1.355 992 |
| 10 000 | 0.532 048 | 0.719 843 | 0.770 335 | 2.057 273 | 1.237 504 | 0.969 473 | 0.765 316 | ||
| 20 000 | 0.532 048 | 0.520 238 | 0.770 335 | 2.005 239 | 1.031 816 | 0.901 608 | 0.591 952 | ||
| R2 | 5 000 | 0.586 456 | 0.601 693 | 0.876 969 | 1.911 315 | 1.779 222 | 1.437 815 | 0.635 495 | |
| 10 000 | 0.585 898 | 0.573 826 | 0.741 698 | 1.852 563 | 1.092 410 | 1.135 834 | 0.599 992 | ||
| 20 000 | 0.585 463 | 0.568 397 | 0.718 350 | 1.787 653 | 1.086 331 | 0.872 544 | 0.599 821 | ||
| 50 | R1 | 5 000 | 0.726 315 | 1.148 595 | 1.870 231 | 3.041 135 | 1.593 779 | 0.744 047 | 2.842 765 |
| 10 000 | 0.716 056 | 0.980 794 | 1.683 181 | 2.551 561 | 1.517 333 | 0.668 578 | 2.753 945 | ||
| 20 000 | 0.677 934 | 0.744 180 | 1.644 061 | 2.550 204 | 1.329 803 | 0.665 560 | 0.933 366 | ||
| R2 | 5 000 | 0.664 622 | 1.983 563 | 1.975 506 | 3.164 919 | 2.273 540 | 0.665 486 | 2.731 112 | |
| 10 000 | 0.656 657 | 1.433 057 | 1.700 505 | 2.823 198 | 2.117 706 | 0.659 641 | 1.134 591 | ||
| 20 000 | 0.650 878 | 0.767 033 | 1.698 549 | 2.432 036 | 1.367 968 | 0.630 471 | 0.942 106 | ||
| 75 | R1 | 5 000 | 0.689 986 | 0.733 063 | 1.823 818 | 5.371 781 | 1.091 436 | 0.826 387 | 1.079 996 |
| 10 000 | 0.689 852 | 0.733 061 | 1.800 903 | 3.579 188 | 1.086 935 | 0.794 721 | 1.042 488 | ||
| 20 000 | 0.689 852 | 0.733 061 | 1.710 061 | 2.822 724 | 1.086 787 | 0.786 419 | 0.947 404 | ||
| R2 | 5 000 | 0.715 865 | 0.791 578 | 2.052 678 | 3.245 265 | 1.121 884 | 1.249 125 | 1.657 453 | |
| 10 000 | 0.690 582 | 0.707 336 | 1.832 811 | 3.087 309 | 1.121 884 | 1.161 167 | 1.158 240 | ||
| 20 000 | 0.689 395 | 0.707 065 | 1.690 035 | 2.948 902 | 1.121 884 | 0.799 485 | 0.983 625 | ||
| 100 | R1 | 5 000 | 0.774 702 | 1.172 915 | 3.391 321 | 2.591 554 | 1.719 753 | 1.893 676 | 2.185 051 |
| 10 000 | 0.755 262 | 0.798 311 | 2.135 919 | 2.423 959 | 1.594 458 | 1.797 107 | 1.613 516 | ||
| 20 000 | 0.755 262 | 0.798 311 | 1.484 260 | 2.423 633 | 1.511 633 | 1.162 780 | 1.336 374 | ||
| R2 | 5 000 | 0.767 045 | 0.850 048 | 1.590 780 | 2.787 817 | 2.201 815 | 2.319 529 | 2.590 174 | |
| 10 000 | 0.738 244 | 0.806 822 | 1.470 112 | 2.363 048 | 1.686 311 | 1.276 485 | 1.880 933 | ||
| 20 000 | 0.738 244 | 0.806 822 | 1.467 441 | 2.360 980 | 1.576 970 | 1.159 064 | 1.347 907 | ||
| 采集点数 | 系统平均误差 | 校验点平均误差 | ||
|---|---|---|---|---|
| R1 | R2 | R1 | R2 | |
| 25 | 0.532 048 | 0.585 463 | 1.345 582 | 1.317 775 |
| 50 | 0.677 934 | 0.650 878 | 0.901 385 | 0.913 546 |
| 75 | 0.689 852 | 0.689 395 | 0.820 336 | 0.811 455 |
| 100 | 0.755 262 | 0.738 244 | 0.761 395 | 0.750 017 |
Tab.7 Convergence and verification results of system
| 采集点数 | 系统平均误差 | 校验点平均误差 | ||
|---|---|---|---|---|
| R1 | R2 | R1 | R2 | |
| 25 | 0.532 048 | 0.585 463 | 1.345 582 | 1.317 775 |
| 50 | 0.677 934 | 0.650 878 | 0.901 385 | 0.913 546 |
| 75 | 0.689 852 | 0.689 395 | 0.820 336 | 0.811 455 |
| 100 | 0.755 262 | 0.738 244 | 0.761 395 | 0.750 017 |
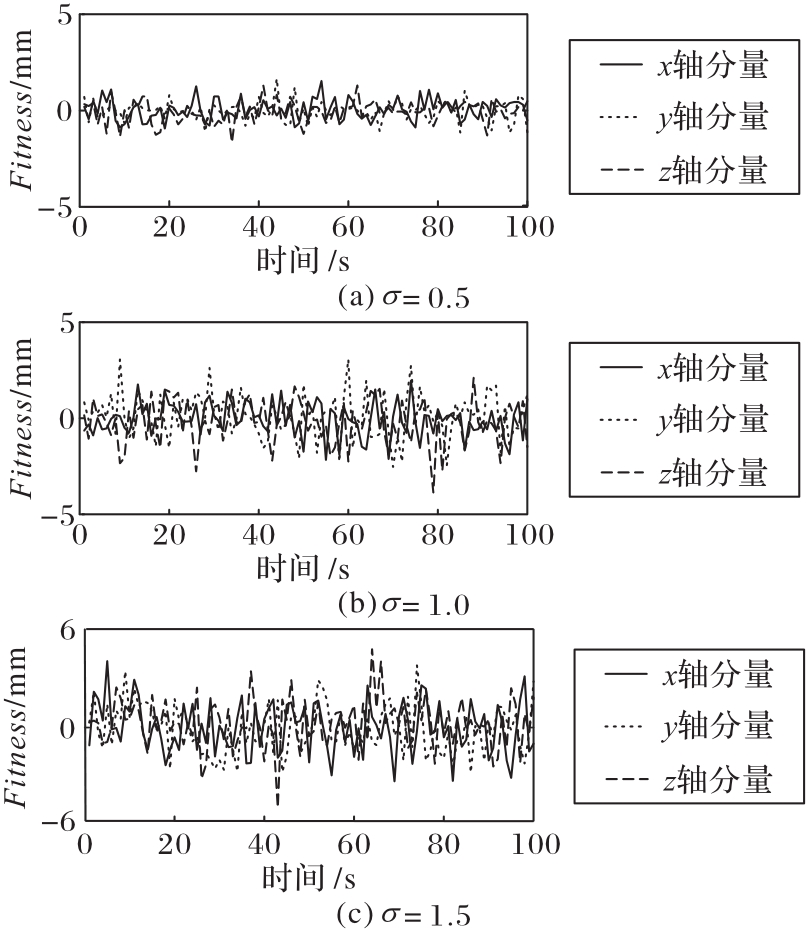
Fig.14 Three Gaussian white noise with different intensities
评价 对象 | σ=0.0 | σ=0.5 | σ=1.0 | σ=1.5 | |||
|---|---|---|---|---|---|---|---|
| 优化前 | 优化后 | 优化前 | 优化后 | 优化前 | 优化后 | ||
系统 整体 | 0.755 | 0.749 | 0.807 | 0.716 | 0.823 | 0.724 | 0.840 |
| x轴 | 0.366 | 0.367 | 0.398 | 0.352 | 0.414 | 0.373 | 0.410 |
| y轴 | 0.371 | 0.372 | 0.444 | 0.367 | 0.424 | 0.352 | 0.412 |
| z轴 | 0.385 | 0.382 | 0.412 | 0.393 | 0.366 | 0.397 | 0.464 |
Tab.8 Fitness of system model after adding noise with different intensities
评价 对象 | σ=0.0 | σ=0.5 | σ=1.0 | σ=1.5 | |||
|---|---|---|---|---|---|---|---|
| 优化前 | 优化后 | 优化前 | 优化后 | 优化前 | 优化后 | ||
系统 整体 | 0.755 | 0.749 | 0.807 | 0.716 | 0.823 | 0.724 | 0.840 |
| x轴 | 0.366 | 0.367 | 0.398 | 0.352 | 0.414 | 0.373 | 0.410 |
| y轴 | 0.371 | 0.372 | 0.444 | 0.367 | 0.424 | 0.352 | 0.412 |
| z轴 | 0.385 | 0.382 | 0.412 | 0.393 | 0.366 | 0.397 | 0.464 |

Fig.15 Convergence of AMECoDEs-LO under noise with different intensities
| 1 | WEN B, TAO B, LI G F. Research status and tendency of intelligent industrial robot [J]. Journal of Physics: Conference Series, 2019, 1302(3): No.032050. 10.1088/1742-6596/1302/3/032050 |
| 2 | LEVINE S, PASTOR P, KRIZHEVSKY A, et al. Learning hand-eye coordination for robotic grasping with deep learning and large-scale data collection [J]. The International Journal of Robotics Research, 2018, 37(4/5): 421-436. 10.1177/0278364917710318 |
| 3 | LI Q W, WANG Z Q, SHEN C W, et al. Method for horizontal alignment deviation measurement using binocular camera without common target [J]. IEEE Access, 2020, 8: 184540-184549. 10.1109/access.2020.3029593 |
| 4 | HAN Y, CHU Z N, ZHAO K. Target positioning method in binocular vision manipulator control based on improved Canny operator [J]. Multimeia Tools and Application, 2020, 79: 9599-9614. 10.1007/s11042-019-08140-9 |
| 5 | XIAO P F, JU H H, LI Q D, et al. A new fixed axis-invariant based calibration approach to improve absolute positioning accuracy of manipulators [J]. IEEE Access, 2020, 8: 134224-134232. 10.1109/ACCESS.2020.3011328 |
| 6 | LV Y F, NA J, YANG Q M, et al. Online adaptive optimal control for continuous-time nonlinear systems with completely unknown dynamics [J]. International Journal of Control, 2016, 89(1): 99-112. 10.1080/00207179.2015.1060362 |
| 7 | WANG K S. Application of genetic algorithms to robot kinematics calibration [J]. International Journal of Systems Science, 2009, 40(2): 147-153. 10.1080/00207720802630644 |
| 8 | XU X H, ZHU D H, ZHANG H Y, et al. TCP-based calibration in robot-assisted belt grinding of aero-engine blades using scanner measurements [J]. The International Journal of Advanced Manufacturing Technology, 2017, 90(1/2/3/4): 635-647. 10.1007/s00170-016-9331-8 |
| 9 | 吴庆华, 万偲, 李子奇,等. 机器人线结构光视觉引导系统的手眼标定方法[J]. 制造业自动化, 2021, 43(11):29-34,40. 10.3969/j.issn.1009-0134.2021.11.008 |
| WU Q H, WAN C, LI Z Q, et al. Hand eye calibration method of robot line structured light vision guidance system [J]. Manufacturing Automation,2021, 43(11):29-34,40. 10.3969/j.issn.1009-0134.2021.11.008 | |
| 10 | HUA J, ZENG L C. Hand-eye calibration algorithm based on an optimized neural network [J]. Actuators, 2021, 10(4): No.85. 10.3390/act10040085 |
| 11 | BAI J, ZHANG Y C, QIN X S, et al. Hybrid calibration and detection approach for mobile robotic manufacturing systems [J]. Industrial Robot, 2020, 47(4): 511-519. 10.1108/ir-09-2019-0194 |
| 12 | WANG H X, LU X, HU Z Y, et al. A vision-based fully-automatic calibration method for hand-eye serial robot [J]. Industrial Robot, 2015, 42(1): 64-73. 10.1108/ir-06-2014-0352 |
| 13 | MISEIKIS J, GLETTE K, ELLE O J, et al. Automatic calibration of a robot manipulator and multi 3D camera system [C]// Proceedings of the 2016 IEEE/SICE International Symposium on System Integration. Piscataway: IEEE, 2016: 735-741. 10.1109/sii.2016.7844087 |
| 14 | YIN S B, REN Y J, ZHU J G, et al. A vision-based self-calibration method for robotic visual inspection systems [J]. Sensors, 2013, 13(12): 16565-16582. 10.3390/s131216565 |
| 15 | YANG C G, JIANG Y M, HE W, et al. Adaptive parameter estimation and control design for robot manipulators with finite-time convergence [J]. IEEE Transactions on Industrial Electronics, 2018, 65(10): 8112-8123. 10.1109/tie.2018.2803773 |
| 16 | CUI L Z, LI G H, ZHU Z X, et al. Adaptive multiple-elites-guided composite differential evolution algorithm with a shift mechanism [J]. Information Sciences, 2018, 422: 122-143. 10.1016/j.ins.2017.09.002 |
| 17 | DENG W, SHANG S F, CAI X, et al. Quantum differential evolution with cooperative coevolution framework and hybrid mutation strategy for large scale optimization [J]. Knowledge-Based Systems, 2021, 224: No.107080. 10.1016/j.knosys.2021.107080 |
| 18 | AHN M S, CHAE H, NOH D, et al. Analysis and noise modeling of the Intel RealSense D435 for mobile robots [C]// Proceedings of the 2019 16th International Conference on Ubiquitous Robots . Piscataway: IEEE, 2019: 707-711. 10.1109/urai.2019.8768489 |
| 19 | ZHANG Z Y. A flexible new technique for camera calibration [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334. 10.1109/34.888718 |
| 20 | TONG L Y, DONG M G, JING C. An improved multi-population ensemble differential evolution [J]. Neurocomputing, 2018, 290: 130-147. 10.1016/j.neucom.2018.02.038 |
| 21 | GUO S M, YANG C C, HSU P H, et al. Improving differential evolution with a successful-parent-selecting framework [J]. IEEE Transactions on Evolutionary Computation, 2015, 19(5): 717-730. 10.1109/tevc.2014.2375933 |
| [1] | Mengdi SUN, Zhonggui SUN, Xu KONG, Hongyan HAN. Design of guided adaptive mathematical morphology for multimodal images [J]. Journal of Computer Applications, 2023, 43(2): 560-566. |
| [2] | Yuyu MENG, Jing GUO. Link prediction algorithm based on information entropy improved PCA model [J]. Journal of Computer Applications, 2022, 42(9): 2823-2829. |
| [3] | GAO Gong, YANG Hongyu, LIU Hong. 3D point cloud face recognition based on deep learning [J]. Journal of Computer Applications, 2021, 41(9): 2736-2740. |
| [4] | LI Xingfeng, HUANG Yuqing, REN Zhenwen, LI Yihong. Robust multi-view clustering algorithm based on adaptive neighborhood [J]. Journal of Computer Applications, 2021, 41(4): 1093-1099. |
| [5] | Hua LI, Guifu LU, Qinru YU. Manifold regularized nonnegative matrix factorization based on clean data [J]. Journal of Computer Applications, 2021, 41(12): 3492-3498. |
| [6] | Yunpeng GONG, Zhiyong ZENG, Feng YE. Person re-identification method based on grayscale feature enhancement [J]. Journal of Computer Applications, 2021, 41(12): 3590-3595. |
| [7] | LU Rongxiu, CHEN Mingming, YANG Hui, ZHU Jianyong. Element component content dynamic monitoring system based on time sequence characteristics of solution images [J]. Journal of Computer Applications, 2021, 41(10): 3075-3081. |
| [8] | PEI Yiyao, GUO Huiming, ZHANG Danpu, CHEN Wenbo. Robust 3D object detection method based on localization uncertainty [J]. Journal of Computer Applications, 2021, 41(10): 2979-2984. |
| [9] | XING Zhiwei, QIAO Di, LIU Hong’en, GAO Zhiwei, LUO Xiao, LUO Qian. Optimization method of airport gate assignment based on relaxation algorithm [J]. Journal of Computer Applications, 2020, 40(6): 1850-1855. |
| [10] | WANG Benjie, NONG Liping, ZHANG Wenhui, LIN Jiming, WANG Junyi. 3D point cloud classification and segmentation network based on Spider convolution [J]. Journal of Computer Applications, 2020, 40(6): 1607-1612. |
| [11] | LI Dongbo, HUANG Lyuwen. Reweighted sparse principal component analysis algorithm and its application in face recognition [J]. Journal of Computer Applications, 2020, 40(3): 717-722. |
| [12] | ZHANG Xiaobo, YANG Yan, LI Tianrui, LU Fan, PENG Lilan. Early diagnosis and prediction of Parkinson's disease based on clustering medical text data [J]. Journal of Computer Applications, 2020, 40(10): 3088-3094. |
| [13] | LAI Jie, WANG Xiaodan, LI Rui, ZHAO Zhenchong. Denoising autoencoder based extreme learning machine [J]. Journal of Computer Applications, 2019, 39(6): 1619-1625. |
| [14] | HUANG Guangqiu, XIE Rong. Cascading failure model of carbon emission spatial correlation system considering load overload [J]. Journal of Computer Applications, 2019, 39(6): 1829-1835. |
| [15] | ZHOU Fei, XIA Pengcheng. Signal strength difference fingerprint localization algorithm based on principal component analysis and chi-square distance [J]. Journal of Computer Applications, 2019, 39(5): 1405-1410. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||