


Journal of Computer Applications ›› 2022, Vol. 42 ›› Issue (7): 2170-2176.DOI: 10.11772/j.issn.1001-9081.2021050749
• Multimedia computing and computer simulation • Previous Articles Next Articles
Gaofeng PAN, Yuan FAN( ), Yu RU, Yuchao GUO
), Yu RU, Yuchao GUO
Received:2021-05-11
Revised:2022-01-10
Accepted:2022-02-18
Online:2022-04-06
Published:2022-07-10
Contact:
Yuan FAN
About author:PAN Gaofeng, born in 1995, M. S. candidate. His research interests include visual simultaneous localization and mapping.Supported by:
潘高峰, 樊渊(), 汝玉, 郭予超
通讯作者:
樊渊
作者简介:潘高峰(1995—),男,河南许昌人,硕士研究生,主要研究方向:视觉同时定位与地图构建基金资助:CLC Number:
Gaofeng PAN, Yuan FAN, Yu RU, Yuchao GUO. Low-texture monocular visual simultaneous localization and mapping algorithm based on point-line feature fusion[J]. Journal of Computer Applications, 2022, 42(7): 2170-2176.
潘高峰, 樊渊, 汝玉, 郭予超. 基于点线特征融合的低纹理单目视觉同时定位与地图构建算法[J]. 《计算机应用》唯一官方网站, 2022, 42(7): 2170-2176.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2021050749

Fig. 1 Texture scene and low-texture scene in TUM dataset

Fig. 2 Relationship between spatial line projection and matched line segments
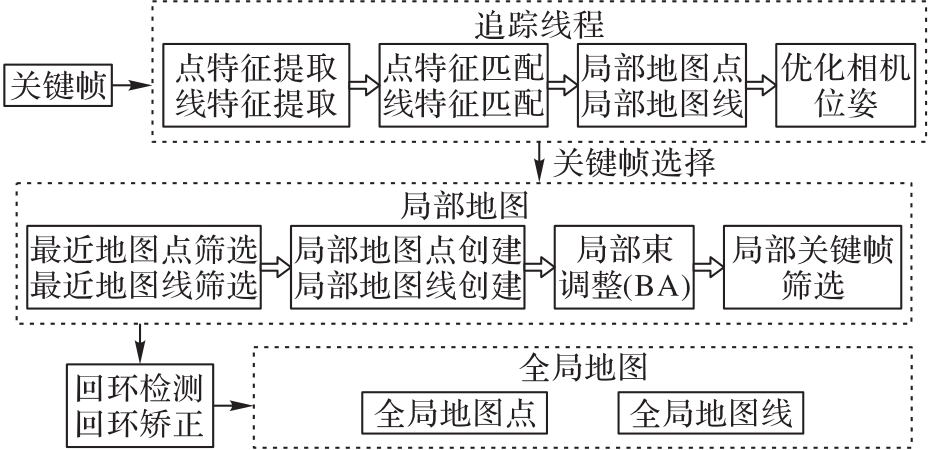
Fig. 3 Flow of monocular SLAM algorithm based on point-line feature fusion

Fig. 4 FAST corner point extraction
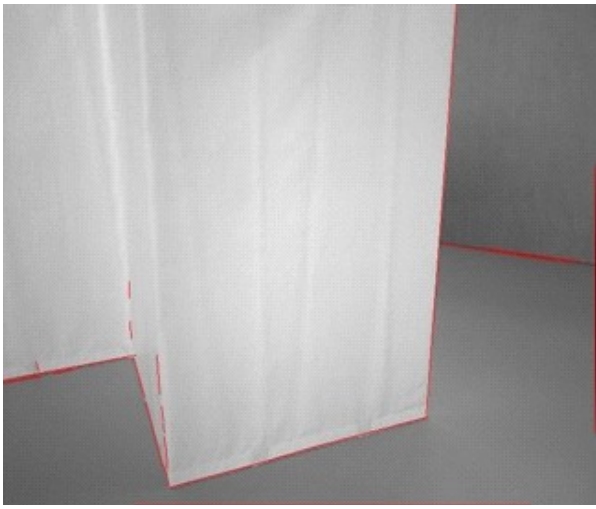
Fig. 5 LSD line feature extraction in low-texture scene
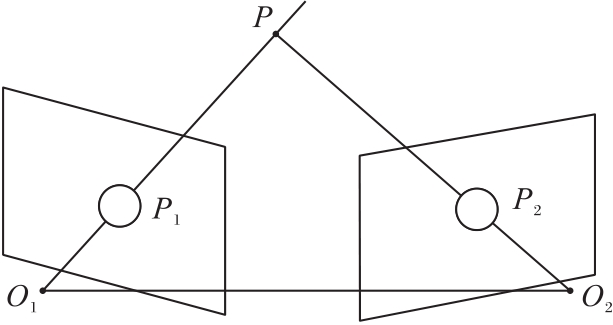
Fig. 6 Triangularization to obtain depths of map points
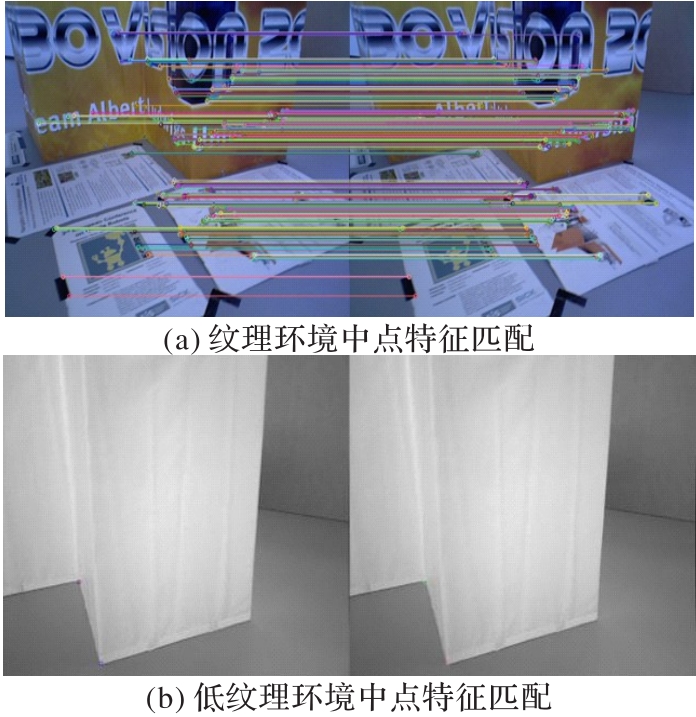
Fig. 7 Point matching effects
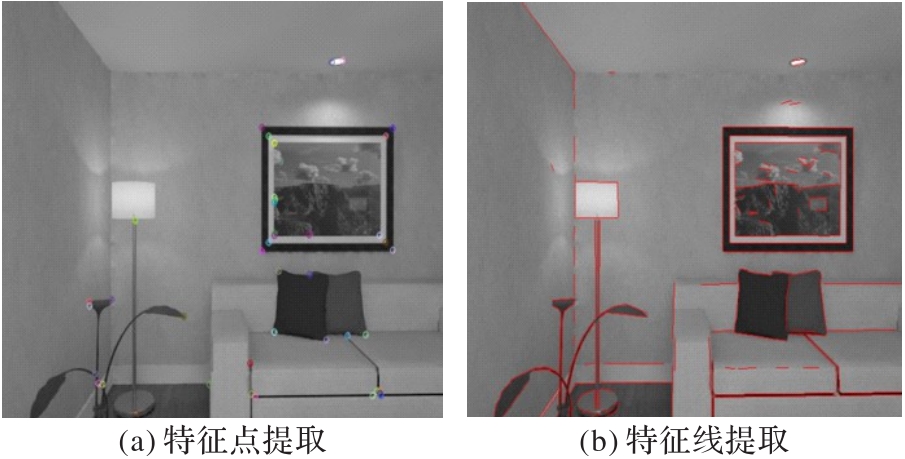
Fig. 8 Point and line extraction in low-texture scene

Fig. 9 Effects of point matching and line matching in low-texture scene
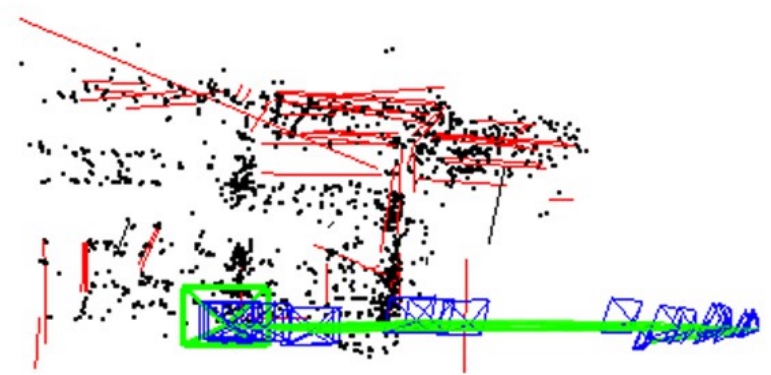
Fig. 10 Point-line sparse map in TUM dataset

Fig. 11 Camera trajectories in TUM low-texture sequences
| TUM数据集 | PL-SLAM | LSD-SLAM | ORB-SLAM2 | 本文算法 |
|---|---|---|---|---|
| fr3-nostructure-notexture-near-withloop | 1.56 | 1.67 | — | 1.42 |
| fr3-structure-notexture-near-withloop | 0.93 | 0.87 | 0.99 | 0.81 |
| fr3-structure-notexture-far | 1.06 | 1.44 | 1.55 | 1.12 |
| fr3-structure-notexture-far-validation | 1.34 | 1.38 | 1.42 | 1.23 |
Tab. 1 Absolute trajectory error comparison of the proposed algorithm and other algorithms
| TUM数据集 | PL-SLAM | LSD-SLAM | ORB-SLAM2 | 本文算法 |
|---|---|---|---|---|
| fr3-nostructure-notexture-near-withloop | 1.56 | 1.67 | — | 1.42 |
| fr3-structure-notexture-near-withloop | 0.93 | 0.87 | 0.99 | 0.81 |
| fr3-structure-notexture-far | 1.06 | 1.44 | 1.55 | 1.12 |
| fr3-structure-notexture-far-validation | 1.34 | 1.38 | 1.42 | 1.23 |
| 操作 | PL-SLAM | 本文算法 |
|---|---|---|
| 特征提取 | 2.911 | 1.985 |
| 位姿估计 | 1.000 | 1.000 |
| 点线特征剔除 | 1.180 | 1.178 |
| 局部BA | 1.842 | 1.769 |
| 关键帧剔除 | 4.441 | 4.332 |
Tab. 2 Running time of each operation
| 操作 | PL-SLAM | 本文算法 |
|---|---|---|
| 特征提取 | 2.911 | 1.985 |
| 位姿估计 | 1.000 | 1.000 |
| 点线特征剔除 | 1.180 | 1.178 |
| 局部BA | 1.842 | 1.769 |
| 关键帧剔除 | 4.441 | 4.332 |
| 1 | DAVISON A J, REID I D, MOLTON N D. MonoSLAM: real-time single camera SLAM[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(6): 1052-1067. 10.1109/tpami.2007.1049 |
| 2 | 张国良,姚二亮. 移动机器人的SLAM与VSLAM方法[M]. 西安:西安交通大学出版社, 2018: 10-15. |
| ZHANG G L, YAO E L. SLAM and VSLAM Methods for Mobile Robots [M]. Xi’an: Xi’an Jiaotong University Press, 2018: 10-15. | |
| 3 | KLEIN G, MURRAY D. Parallel tracking and mapping for small AR workspaces[C]// Proceedings of the 6th IEEE and ACM International Symposium on Mixed and Augmented Reality. Piscataway: IEEE, 2007: 225-234. 10.1109/ismar.2007.4538852 |
| 4 | MUR-ARTAL R, TARDÓS J D. ORB-SLAM2: an open-source SLAM system for monocular, stereo, and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262. 10.1109/tro.2017.2705103 |
| 5 | ZHANG L L, KOCH R. Hand-held monocular SLAM based on line segments[C]// Proceedings of the 2011 Irish Machine Vision and Image Processing Conference. Piscataway: IEEE, 2011: 7-14. 10.1109/imvip.2011.11 |
| 6 | ENGEL J, KOLTUN V, CREMERS D. Direct sparse odometry[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(3): 611-625. 10.1109/tpami.2017.2658577 |
| 7 | ENGEL J, SCHÖPS T, CREMERS D. LSD-SLAM: large-scale direct monocular SLAM[C]// Proceedings of the 2014 European Conference on Computer Vision, LNCS 8690. Cham: Springer, 2014: 834-849. |
| 8 | NEWCOMBE R A, LOVEGROVE S J, DAVISON A J. DTAM: dense tracking and mapping in real-time[C]// Proceedings of the 2011 International Conference on Computer Vision. Piscataway: IEEE, 2011: 2320-2327. 10.1109/iccv.2011.6126513 |
| 9 | PIZZOLI M, FORSTER C, SCARAMUZZA D. REMODE: probabilistic, monocular dense reconstruction in real time[C]// Proceedings of the 2014 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2014: 2609-2616. 10.1109/icra.2014.6907233 |
| 10 | PUMAROLA A, VAKHITOV A, AGUDO A, et al. PL-SLAM: real-time monocular visual SLAM with points and lines[C]// Proceedings of the 2017 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2017: 4503-4508. 10.1109/icra.2017.7989522 |
| 11 | ZUO X X, XIE X J, LIU Y, et al. Robust visual SLAM with point and line features[C]// Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2017: 1775-1782. 10.1109/iros.2017.8205991 |
| 12 | GOMEZ-OJEDA R, GONZALEZ-JIMENEZ J. Robust stereo visual odometry through a probabilistic combination of points and line segments[C]// Proceedings of the 2016 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2016: 2521-2526. 10.1109/icra.2016.7487406 |
| 13 | ZHANG G X, SUH I H. SoF-SLAM: segments-on-floor-based monocular SLAM[C]// Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2010: 2083-2088. |
| 14 | ZHANG G X, SUH I H. Building a partial 3D line-based map using a monocular SLAM[C]// Proceedings of the 2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2011:1497-1502. 10.1109/icra.2011.5979665 |
| 15 | R G von GIOI, JAKUBOWICZ J, MOREL J M, et al. LSD: a fast line segment detector with a false detection control[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(4): 722-732. 10.1109/tpami.2008.300 |
| 16 | ZHANG L L, KOCH R. An efficient and robust line segment matching approach based on LBD descriptor and pairwise geometric consistency[J]. Journal of Visual Communication and Image Representation, 2013, 24(7):794-805. 10.1016/j.jvcir.2013.05.006 |
| 17 | 高翔,张涛,刘毅,等. 视觉SLAM十四讲:从理论到实践[M]. 北京:电子工业出版社, 2017: 155-157. |
| GAO X, ZHANG T, LIU Y, et al. Vision SLAM 14 Lectures: From Theory to Practice[M]. Beijing: Publishing House of Electronics Industry, 2017: 155-157. | |
| 18 | BARTOLI A, STURM P. The 3D line motion matrix and alignment of line reconstructions[J]. International Journal of Computer Vision, 2004, 57(3):159-178. 10.1023/b:visi.0000013092.07433.82 |
| 19 | ROSTEN E, DRUMMOND T. Machine learning for high-speed corner detection[C]// Proceedings of the 2006 European Conference on Computer Vision, LNCS 3951. Berlin: Springer, 2006: 430-443. |
| 20 | HARTLEY R, ZISSERMAN A. Multiple View Geometry in Computer Vision[M]. 2nd ed. Cambridge: Cambridge University Press, 2003:33-36. 10.1017/cbo9780511811685 |
| 21 | 席志红,王洪旭,韩双全. 基于ORB-SLAM2系统的快速误匹配剔除算法与地图构建[J]. 计算机应用, 2020, 40(11): 3289-3294. |
| XI Z H, WANG H X, HAN S Q. Fast mismatch elimination algorithm and map-building based on ORB-SLAM2 system[J]. Journal of Computer Applications, 2020, 40(11): 3289-3294. |
| [1] | Tianyu HUANG, Yuanxing LI, Hao CHEN, Zijia GUO, Mingjun WEI. User cluster partitioning method based on weighted fuzzy clustering in ground-air collaboration scenarios [J]. Journal of Computer Applications, 2024, 44(5): 1555-1561. |
| [2] | CAI Ruiguang, ZHANG Desheng, XIAO Yanting. Parameter independent weighted local mean-based pseudo nearest neighbor classification algorithm [J]. Journal of Computer Applications, 2021, 41(6): 1694-1700. |
| [3] | YUAN Meng'en, CHEN Lijia, FENG Zikai. Path planning algorithm of multi-population particle swarm manipulator based on monocular vision [J]. Journal of Computer Applications, 2020, 40(10): 2863-2871. |
| [4] | ZHANG Wuyang, ZHANG Wei, SONG Fang, LONG Lin. Monocular vision obstacle avoidance method for quadcopter based on deep learning [J]. Journal of Computer Applications, 2019, 39(4): 1001-1005. |
| [5] | ZHU Jie, ZHANG Junsan, WU Shufang, DONG Yukun, LYU Lin. Multi-center convolutional feature weighting based image retrieval [J]. Journal of Computer Applications, 2018, 38(10): 2778-2781. |
| [6] | LUO Yuyang, XU Weimin, ZHANG Mengjie, LIU Yuqiang. Space positioning method of bridge crane payload based on monocular vision [J]. Journal of Computer Applications, 2016, 36(4): 1156-1162. |
| [7] | QIU Yunfei, LIU Shixing, LIN Mingming, SHAO Liangshan. Feature transfer weighting algorithm based on distribution and term frequency-inverse class frequency [J]. Journal of Computer Applications, 2015, 35(6): 1643-1648. |
| [8] | ZHI Xiaobin, XU Zhaohui. Robust soft subspace clustering algorithm with feature weight self-adjustment mechanism [J]. Journal of Computer Applications, 2015, 35(3): 770-774. |
| [9] | HE Shao-jia LIU Zi-yang SHI Jian-qing. Obstacle detection of indoor robots based on monocular vision [J]. Journal of Computer Applications, 2012, 32(09): 2556-2559. |
| [10] | LIU Lei CHEN Xing-shu YIN Xue-yuan DUAN Yi LV Zhao. Network User Identify On Feature Weighting Naive Bayes Classification Algorithm [J]. Journal of Computer Applications, 2011, 31(12): 3268-3270. |
| [11] | . Margin maximization feature weighting with better adaptability [J]. Journal of Computer Applications, 2010, 30(9): 2275-2278. |
| [12] | . Monocular vision-based vehicle collision warning system [J]. Journal of Computer Applications, 2007, 27(8): 2056-2058. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||