


Journal of Computer Applications ›› 2022, Vol. 42 ›› Issue (10): 3177-3183.DOI: 10.11772/j.issn.1001-9081.2021091614
• Multimedia computing and computer simulation • Previous Articles
Qiwen WU, Jianhua WANG, Xiang ZHENG, Ju FENG, Hongyan JIANG, Yubo WANG
Received:2021-09-13
Revised:2021-12-24
Accepted:2022-01-04
Online:2022-04-15
Published:2022-10-10
Contact:
Jianhua WANG
About author:WU Qiwen, born in 1997, M. S. candidate. Her research interests include machine vision.Supported by:通讯作者:
王建华
作者简介:第一联系人:吴奇文(1997—),女,江西上饶人,硕士研究生,主要研究方向:机器视觉基金资助:CLC Number:
Qiwen WU, Jianhua WANG, Xiang ZHENG, Ju FENG, Hongyan JIANG, Yubo WANG. Waterweed image segmentation method based on improved U-Net[J]. Journal of Computer Applications, 2022, 42(10): 3177-3183.
吴奇文, 王建华, 郑翔, 冯居, 姜洪岩, 王昱博. 基于改进U-Net的水草图像分割方法[J]. 《计算机应用》唯一官方网站, 2022, 42(10): 3177-3183.
Add to citation manager EndNote|Ris|BibTeX
URL: http://www.joca.cn/EN/10.11772/j.issn.1001-9081.2021091614

Fig. 1 Data acquisition equipment and images of different types of waterweeds

Fig. 2 Different types of waterweeds and corresponding label images

Fig. 3 Improved U-Net network structure

Fig. 4 Multi-scale feature extraction

Fig. 5 Hybrid attention module
| 实际标签 | 预测标签 | |
|---|---|---|
| 是水草 | 不是水草 | |
| 是水草 | 真正TP(True Positive) | 假正FP(False Positive) |
| 不是水草 | 假负FN(False Negative) | 真负TN(True Negative) |
Tab. 1 Evaluation index basis
| 实际标签 | 预测标签 | |
|---|---|---|
| 是水草 | 不是水草 | |
| 是水草 | 真正TP(True Positive) | 假正FP(False Positive) |
| 不是水草 | 假负FN(False Negative) | 真负TN(True Negative) |
| 方法 | 准确率 | mIoU | mPA |
|---|---|---|---|
| FCN(VGG16)[ | 89.22 | 75.98 | 86.90 |
| SegNet[ | 90.78 | 79.80 | 88.12 |
| U-Net(VGG16)[ | 92.18 | 87.35 | 92.17 |
| U-Net(ResNet18)[ | 93.52 | 89.42 | 94.27 |
| DeepLabv3[ | 95.93 | 89.96 | 94.86 |
| 本文方法 | 96.80 | 91.22 | 95.29 |
Tab. 2 Comparison of segmentation results of different methods
| 方法 | 准确率 | mIoU | mPA |
|---|---|---|---|
| FCN(VGG16)[ | 89.22 | 75.98 | 86.90 |
| SegNet[ | 90.78 | 79.80 | 88.12 |
| U-Net(VGG16)[ | 92.18 | 87.35 | 92.17 |
| U-Net(ResNet18)[ | 93.52 | 89.42 | 94.27 |
| DeepLabv3[ | 95.93 | 89.96 | 94.86 |
| 本文方法 | 96.80 | 91.22 | 95.29 |

Fig. 6 Comparison of visualized waterweed segmentation results of different methods
| 方法 | 准确率 | mIoU | mPA |
|---|---|---|---|
| U-Net(ResNet18) | 93.52 | 89.42 | 94.27 |
| +混合注意力模块 | 95.89 | 90.05 | 94.71 |
| +多尺度图像输入 | 95.79 | 89.45 | 94.29 |
| +多尺度图像输入+混合损失函数 | 96.13 | 90.66 | 94.67 |
| 本文方法 | 96.80 | 91.22 | 95.29 |
Tab. 3 Comparison of ablation experimental results on waterweed dataset
| 方法 | 准确率 | mIoU | mPA |
|---|---|---|---|
| U-Net(ResNet18) | 93.52 | 89.42 | 94.27 |
| +混合注意力模块 | 95.89 | 90.05 | 94.71 |
| +多尺度图像输入 | 95.79 | 89.45 | 94.29 |
| +多尺度图像输入+混合损失函数 | 96.13 | 90.66 | 94.67 |
| 本文方法 | 96.80 | 91.22 | 95.29 |
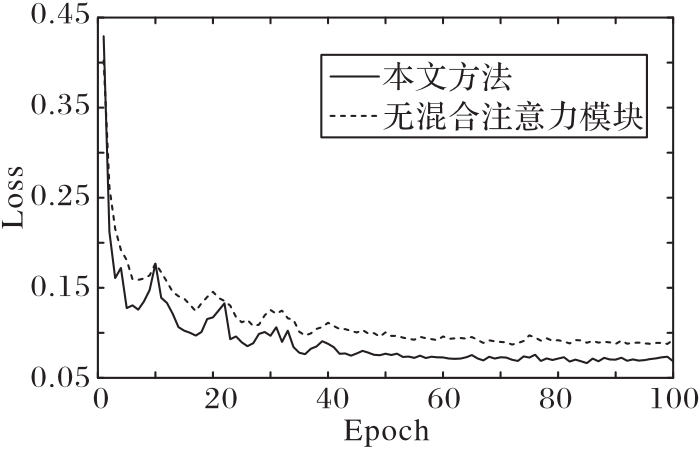
Fig. 7 Comparison of loss decrease with and without hybrid attention module
| 1 | 罗艾娜,郑骏. 基于深度神经网络的复杂光照下的蓝藻图片语义分割[J]. 计算机应用与软件, 2018, 35(4):254-259. 10.3969/j.issn.1000-386x.2018.04.047 |
| LUO A N, ZHENG J. Semantic segmentation of cyanobacteria pictures based on DCNN under complicated illumination[J]. Computer Applications and Software, 2018, 35(4):254-259. 10.3969/j.issn.1000-386x.2018.04.047 | |
| 2 | 杨朔,陈丽芳,石瑀,等. 基于深度生成式对抗网络的蓝藻语义分割[J]. 计算机应用, 2018, 38(6):1554-1561. 10.11772/j.issn.1001-9081.2017122872 |
| YANG S, CHEN L F, SHI Y, et al. Semantic segmentation of blue-green algae based on deep generative adversarial net[J]. Journal of Computer Applications, 2018, 38(6):1554-1561. 10.11772/j.issn.1001-9081.2017122872 | |
| 3 | 李国进,姚冬宜,艾矫燕,等. 基于改进Faster R-CNN的水面漂浮物识别与定位[J]. 信阳师范学院学报(自然科学版), 2021, 34(2):292-299. |
| LI G J, YAO D Y, AI J Y, et al. Detection and localization of floating objects via improved Faster R-CNN[J]. Journal of Xinyang Normal University (Natural Science Edition), 2021, 34(2):292-299. | |
| 4 | ZHAO R Y, WANG J H, ZHENG X, et al. Maritime visible image classification based on double transfer method[J]. IEEE Access, 2020, 8: 166335-166346. 10.1109/access.2020.3022883 |
| 5 | 邹宜洋. 基于卷积神经网络的船舶识别跟踪技术研究[D]. 大连:大连海事大学, 2020:68-88. |
| ZOU Y J. Research on ship identification and tracking technology based on convolutional neural network[D]. Dalian: Dalian Maritime University, 2020: 68-88. | |
| 6 | 涂昊,刁云峰,程文明,等. 基于深度学习的实时集装箱箱号识别算法[J]. 起重运输机械, 2021(13):58-63. 10.3969/j.issn.1001-0785.2021.13.018 |
| TU H, DIAO Y F, CHENG W M, et al. Real-time container number recognition algorithm based on deep learning[J]. Hoisting and Conveying Machinery, 2021(13):58-63. 10.3969/j.issn.1001-0785.2021.13.018 | |
| 7 | LONG J, SHELHAMER E, DARRELL T. Fully convolutional networks for semantic segmentation[C]// Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2015: 3431-3440. 10.1109/cvpr.2015.7298965 |
| 8 | RONNEBERGER O, FISCHER P, BROX T. U-Net: convolutional networks for biomedical image segmentation[C]// Proceedings of the 2015 International Conference on Medical Image Computing and Computer-Assisted Intervention, LNCS 9351. Cham: Springer, 2015: 234-241. |
| 9 | HU J, SHEN L, SUN G. Squeeze-and-excitation networks[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 7132-7141. 10.1109/cvpr.2018.00745 |
| 10 | WOO S, PARK J, LEE J Y, et al. CBAM: convolutional block attention module[C]// Proceedings of the 2018 European Conference on Computer Vision, LNCS 11211. Cham: Springer, 2018: 3-19. |
| 11 | LI X, WANG W H, HU X L, et al. Selective kernel networks[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 510-519. 10.1109/cvpr.2019.00060 |
| 12 | YU F, KOLTUN V. Multi-scale context aggregation by dilated convolutions [EB/OL]. (2016-04-30) [2021-08-11]. . |
| 13 | CHEN L C, PAPANDREOU G, SCHROFF F, et al. Rethinking atrous convolution for semantic image segmentation [EB/OL]. (2017-12-05) [2021-08-15].. 10.1007/978-3-030-01234-2_49 |
| 14 | WANG P Q, CHEN P F, YUAN Y, et al. Understanding convolution for semantic segmentation[C]// Proceedings of the 2018 IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE, 2018: 1451-1460. 10.1109/wacv.2018.00163 |
| 15 | TAO A, SPARA K, CATANZARO B. Hierarchical multi-scale attention for semantic segmentation[J]. (2020-05-21) [2021-08-15].. 10.48550/arXiv.2005.10821 |
| 16 | HADSELL R, CHOPRA S, LeCUN Y. Dimensionality reduction by learning an invariant mapping[C]// Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2006: 1735-1742. 10.1109/cvpr.2006.9 |
| 17 | WU C Y, MANMATHA R, SMOLA A J, et al. Sampling matters in deep embedding learning[C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017: 2859-2867. 10.1109/iccv.2017.309 |
| 18 | MILLETARI F, NAVAB N, AHMADI S A. V-Net: fully convolutional neural networks for volumetric medical image segmentation[C]// Proceedings of the 4th International Conference on 3D Vision. Piscataway: IEEE, 2016: 565-571. 10.1109/3dv.2016.79 |
| 19 | KLINE D M, BERARDI V L. Revisiting squared-error and cross-entropy functions for training neural network classifiers[J]. Neural Computing and Applications, 2005, 14(4): 310-318. 10.1007/s00521-005-0467-y |
| 20 | BADRINARAYANAN V, KENDALL A, CIPOLLA R. SegNet: a deep convolutional encoder-decoder architecture for image segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(12): 2481-2495. 10.1109/tpami.2016.2644615 |
| [1] | Haiyun WEI, Qianying ZHENG, Jinling YU. Motion blurred image restoration algorithm based on multi-scale network [J]. Journal of Computer Applications, 2022, 42(9): 2838-2844. |
| [2] | Wentao ZHANG, Yuanyu WANG, Saize LI. Depth estimation model of single haze image based on conditional generative adversarial network [J]. Journal of Computer Applications, 2022, 42(9): 2865-2875. |
| [3] | Yaoshun LI, Lizhi LIU. Lightweight network for rebar detection with attention mechanism [J]. Journal of Computer Applications, 2022, 42(9): 2900-2908. |
| [4] | Hongjun HENG, Tianbao XU. Attention sentiment analysis model based on multi-scale convolution and gating mechanism [J]. Journal of Computer Applications, 2022, 42(9): 2674-2679. |
| [5] | Yuefeng LIU, Xiaoyan ZHANG, Wei GUO, Haodong BIAN, Yingjie HE. Remaining useful life prediction method of aero-engine based on optimized hybrid model [J]. Journal of Computer Applications, 2022, 42(9): 2960-2968. |
| [6] | Kai WEN, Weiwei TANG, Junchen XIONG. Real-time segmentation algorithm based on attention mechanism and effective factorized convolution [J]. Journal of Computer Applications, 2022, 42(9): 2659-2666. |
| [7] | Xudong HOU, Fei TENG, Yi ZHANG. Medical named entity recognition model based on deep auto-encoding [J]. Journal of Computer Applications, 2022, 42(9): 2686-2692. |
| [8] | Kun LI, Qing HOU. Lightweight human pose estimation based on attention mechanism [J]. Journal of Computer Applications, 2022, 42(8): 2407-2414. |
| [9] | Huazhong JIN, Xiuyang ZHANG, Zhiwei YE, Wenqi ZHANG, Xiaoyu XIA. Image denoising model based on approximate U-shaped network structure [J]. Journal of Computer Applications, 2022, 42(8): 2571-2577. |
| [10] | Liying ZHANG, Chunjiang PANG, Xinying WANG, Guoliang LI. Multi-scale object detection algorithm based on improved YOLOv3 [J]. Journal of Computer Applications, 2022, 42(8): 2423-2431. |
| [11] | Xinyu ZHANG, Sheng DING, Zhipei YANG. Traffic sign detection algorithm based on improved attention mechanism [J]. Journal of Computer Applications, 2022, 42(8): 2378-2385. |
| [12] | Yinglü XUAN, Yuan WAN, Jiahui CHEN. Time series classification by LSTM based on multi-scale convolution and attention mechanism [J]. Journal of Computer Applications, 2022, 42(8): 2343-2352. |
| [13] | Minghui WU, Guangjie ZHANG, Canghong JIN. Time series prediction model based on multimodal information fusion [J]. Journal of Computer Applications, 2022, 42(8): 2326-2332. |
| [14] | Zhenhu LYU, Xinzheng XU, Fangyan ZHANG. Lightweight attention mechanism module based on squeeze and excitation [J]. Journal of Computer Applications, 2022, 42(8): 2353-2360. |
| [15] | Chengxia XU, Qing YAN, Teng LI, Kaichao MIAO. De-raining algorithm based on joint attention mechanism for single image [J]. Journal of Computer Applications, 2022, 42(8): 2578-2585. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||