


Journal of Computer Applications ›› 2022, Vol. 42 ›› Issue (12): 3924-3930.DOI: 10.11772/j.issn.1001-9081.2021101778
• Frontier and comprehensive applications • Previous Articles
Bingqi SHEN1,2, Zhiming ZHANG1( ), Shaolong SHU1
), Shaolong SHU1
Received:2021-10-18
Revised:2021-12-16
Accepted:2021-12-23
Online:2021-12-31
Published:2022-12-10
Contact:
Zhiming ZHANG
About author:SHEN Bingqi,born in 1999, M. S. candidate. His research interests include simultaneous localization and mapping, autonomous mobile robot.Supported by:通讯作者:
张志明
作者简介:申炳琦(1999—),男,河南安阳人,硕士研究生,CCF会员,主要研究方向:同步定位与地图构建、自主移动机器人基金资助:CLC Number:
Bingqi SHEN, Zhiming ZHANG, Shaolong SHU. UWB-VIO integrated indoor positioning algorithm for mobile robots[J]. Journal of Computer Applications, 2022, 42(12): 3924-3930.
申炳琦, 张志明, 舒少龙. 移动机器人超宽带与视觉惯性里程计组合的室内定位算法[J]. 《计算机应用》唯一官方网站, 2022, 42(12): 3924-3930.
Add to citation manager EndNote|Ris|BibTeX
URL: http://www.joca.cn/EN/10.11772/j.issn.1001-9081.2021101778
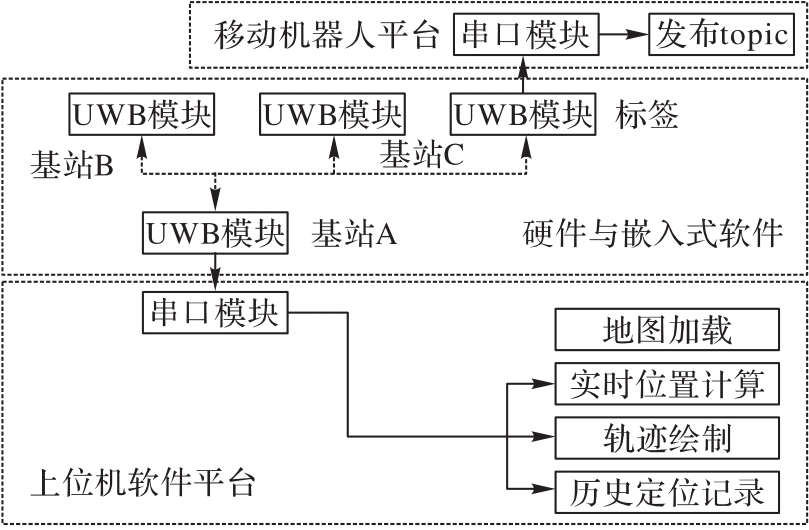
Fig. 1 UWB positioning system
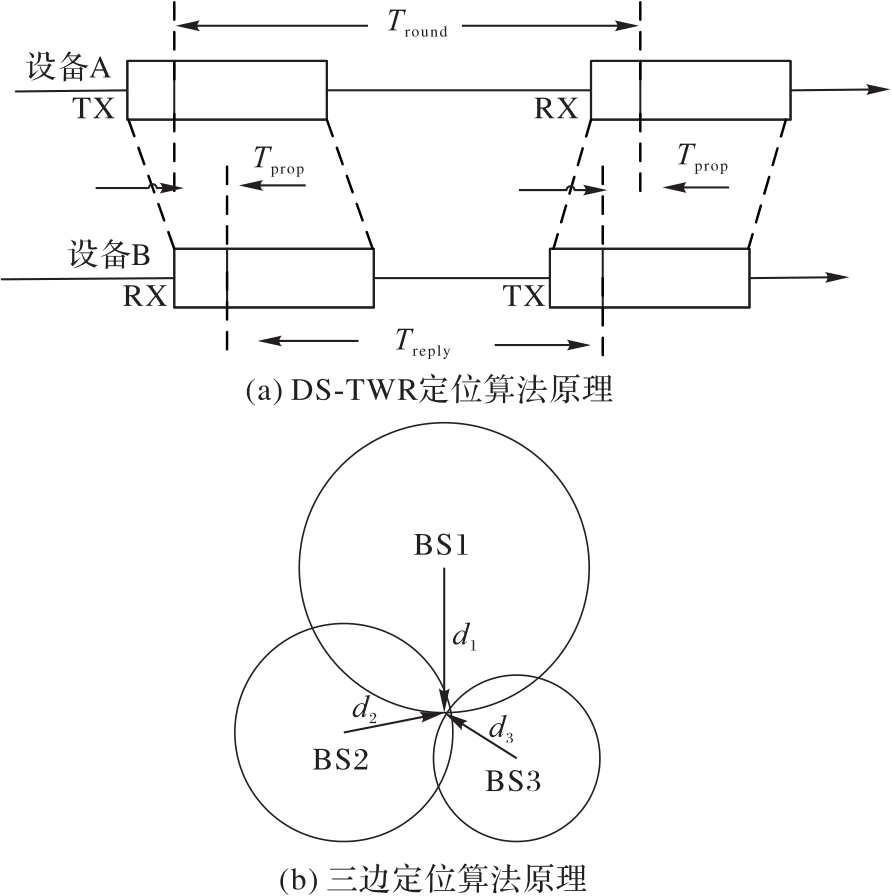
Fig. 2 Principles of UWB positioning algorithms

Fig. 3 Flow of VIO positioning module S-MSCKF algorithm
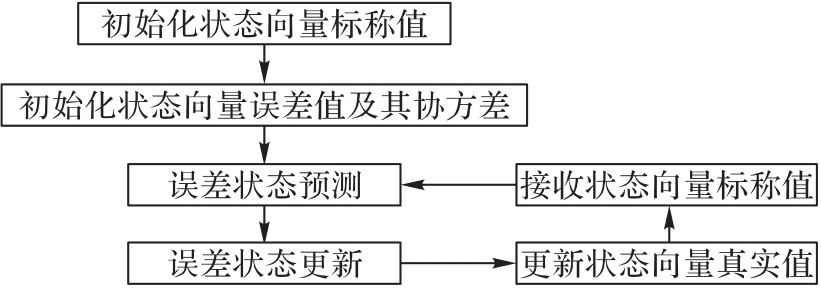
Fig. 4 Flow of ES-EKF algorithm

Fig.5 Overall architecture of UWB-VIO integrated positioning system

Fig. 6 Scenes of experiment sites
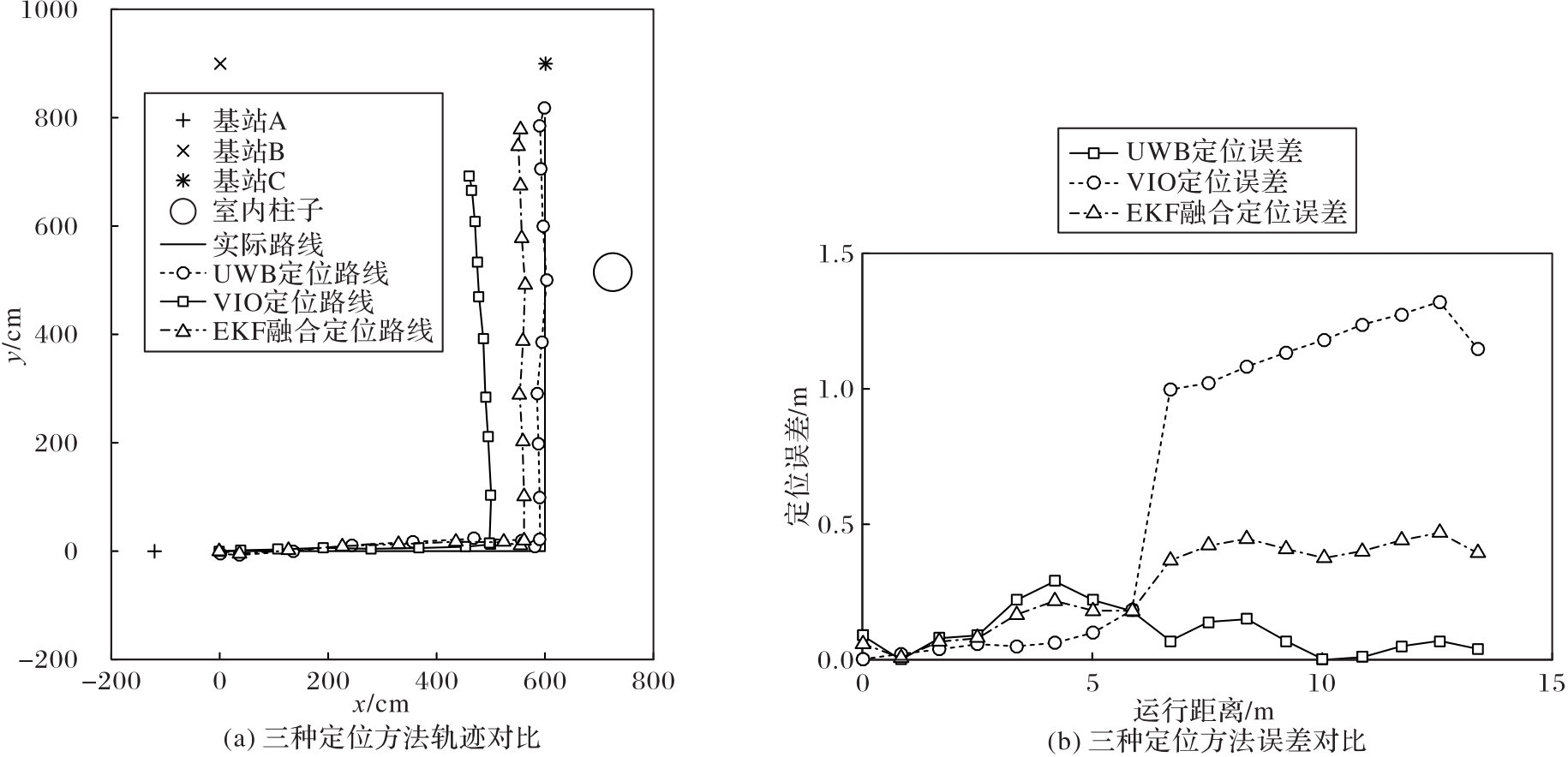
Fig. 7 Positioning effect comparison in obstacle-free small site
坐标轴 方向 | RMSE | MAX | ||||||
|---|---|---|---|---|---|---|---|---|
| UWB/m | VIO/m | UWB/VIO via ES-EKF/m | 性能提升/% | UWB/m | VIO/m | UWB/VIO via ES-EKF/m | 性能提升/% | |
| 总体 | 0.130 5 | 0.869 2 | 0.319 8 | -145.0 | 0.490 0 | 1.372 3 | 0.512 4 | -4.6 |
| x方向 | 0.084 9 | 1.172 3 | 0.423 4 | -398.7 | 0.180 0 | 1.372 3 | 0.512 4 | -184.6 |
| y方向 | 0.164 7 | 0.347 3 | 0.152 3 | 7.5 | 0.490 0 | 1.153 0 | 0.393 0 | 19.8 |
Tab.1 Error comparison for results of different positioning algorithms in obstacle-free small site
坐标轴 方向 | RMSE | MAX | ||||||
|---|---|---|---|---|---|---|---|---|
| UWB/m | VIO/m | UWB/VIO via ES-EKF/m | 性能提升/% | UWB/m | VIO/m | UWB/VIO via ES-EKF/m | 性能提升/% | |
| 总体 | 0.130 5 | 0.869 2 | 0.319 8 | -145.0 | 0.490 0 | 1.372 3 | 0.512 4 | -4.6 |
| x方向 | 0.084 9 | 1.172 3 | 0.423 4 | -398.7 | 0.180 0 | 1.372 3 | 0.512 4 | -184.6 |
| y方向 | 0.164 7 | 0.347 3 | 0.152 3 | 7.5 | 0.490 0 | 1.153 0 | 0.393 0 | 19.8 |

Fig. 8 Positioning effect comparison in large site with obstacles
坐标轴 方向 | RMSE | MAX | ||||||
|---|---|---|---|---|---|---|---|---|
| UWB/m | VIO/m | UWB/VIO via ES-EKF/m | 性能提升/% | UWB/m | VIO/m | UWB/VIO via ES-EKF/m | 性能提升/% | |
| 总体 | 0.359 5 | 0.848 6 | 0.337 0 | 6.3 | 1.240 0 | 1.730 0 | 1.185 9 | 4.4 |
| x方向 | 0.229 4 | 0.201 9 | 0.130 9 | 37.5 | 1.050 0 | 0.408 3 | 0.607 5 | -48.8 |
| y方向 | 0.486 9 | 1.296 2 | 0.501 3 | -2.9 | 1.240 0 | 1.730 0 | 1.185 9 | 4.4 |
Tab. 2 Error comparison for results of different positioning algorithms in large site with obstacles
坐标轴 方向 | RMSE | MAX | ||||||
|---|---|---|---|---|---|---|---|---|
| UWB/m | VIO/m | UWB/VIO via ES-EKF/m | 性能提升/% | UWB/m | VIO/m | UWB/VIO via ES-EKF/m | 性能提升/% | |
| 总体 | 0.359 5 | 0.848 6 | 0.337 0 | 6.3 | 1.240 0 | 1.730 0 | 1.185 9 | 4.4 |
| x方向 | 0.229 4 | 0.201 9 | 0.130 9 | 37.5 | 1.050 0 | 0.408 3 | 0.607 5 | -48.8 |
| y方向 | 0.486 9 | 1.296 2 | 0.501 3 | -2.9 | 1.240 0 | 1.730 0 | 1.185 9 | 4.4 |
| 1 | CADENA C, CARLONE L, CARRILLO H, et al. Past, present, and future of simultaneous localization and mapping: toward the robust-perception age[J]. IEEE Transactions on Robotics, 2016, 32(6):1309-1332. 10.1109/tro.2016.2624754 |
| 2 | BRESSON G, ALSAYED Z, YU L, et al. Simultaneous localization and mapping: a survey of current trends in autonomous driving[J]. IEEE Transactions on Intelligent Vehicles, 2017, 2(3):194-220. 10.1109/tiv.2017.2749181 |
| 3 | 丁斗建,赵晓林,王长根,等. 基于视觉的机器人自主定位与障碍物检测方法[J]. 计算机应用, 2019, 39(6):1849-1854. 10.11772/j.issn.1001-9081.2018102187 |
| DING D J, ZHAO X L, WANG C G, et al. Autonomous localization and obstacle detection method of robot based on vision[J]. Journal of Computer Applications, 2019, 39(6):1849-1854. 10.11772/j.issn.1001-9081.2018102187 | |
| 4 | 房德国,王伟,李自然,等. VIO-SLAM综述[J]. 电光与控制, 2020, 27(12):58-62, 100. 10.3969/j.issn.1671-637X.2020.12.013 |
| FANG D G, WANG W, LI Z R, et al. VIO-SLAM review[J]. Electronics Optics and Control, 2020, 27(12):58-62, 100. 10.3969/j.issn.1671-637X.2020.12.013 | |
| 5 | MOURIKIS A I, ROUMELIOTIS S I. A multi-state constraint Kalman filter for vision-aided inertial navigation[C]// Proceedings of the 2007 International Conference on Robotics and Automation. Piscataway: IEEE, 2007: 3565-3572. 10.1109/robot.2007.364024 |
| 6 | LEUTENEGGER S, LYNEN S, BOSSE M, et al. Keyframe-based visual-inertial odometry using nonlinear optimization[J]. The International Journal of Robotics Research, 2015, 34(3):314-334. 10.1177/0278364914554813 |
| 7 | QIN T, LI P L, SHEN S J. VINS-Mono: a robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4): 1004-1020. 10.1109/tro.2018.2853729 |
| 8 | SUSKI W, BANERJEE S, HOOVER A. Using a map of measurement noise to improve UWB indoor position tracking[J]. IEEE Transactions on Instrumentation and Measurement, 2013, 62(8): 2228-2236. 10.1109/tim.2013.2256714 |
| 9 | PROROK A, MARTINOLI A. Accurate indoor localization with ultra-wideband using spatial models and collaboration[J]. The International Journal of Robotics Research, 2014, 33(4):547-568. 10.1177/0278364913500364 |
| 10 | HANSSENS B, PLETS D, TANGHE E, et al. An indoor variance-based localization technique utilizing the UWB estimation of geometrical propagation parameters[J]. IEEE Transactions on Antennas and Propagation, 2018, 66(5): 2522-2533. 10.1109/tap.2018.2810340 |
| 11 | XU H, WANG L Q, ZHANG Y C, et al. Decentralized visual-inertial-UWB fusion for relative state estimation of aerial swarm[C]// Proceedings of the 2020 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2020: 8776-8782. 10.1109/icra40945.2020.9196944 |
| 12 | NGUYEN T H, NGUYEN T M, XIE L H. Range-focused fusion of camera-IMU-UWB for accurate and drift-reduced localization[J]. IEEE Robotics and Automation Letters, 2021, 6(2):1678-1685. 10.1109/lra.2021.3057838 |
| 13 | WANG C, ZHANG H D, NGUYEN T M, et al. Ultra-wideband aided fast localization and mapping system[C]// Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2017: 1602-1609. 10.1109/iros.2017.8205968 |
| 14 | NEIRYNCK D, LUK E, McLAUGHLIN M. An alternative double-sided two-way ranging method[C]// Proceedings of the 13th Workshop on Positioning, Navigation and Communications. Piscataway: IEEE, 2016:1-4. 10.1109/wpnc.2016.7822844 |
| 15 | JEON J, JUNG S, LEE E, et al. Run your visual-inertial odometry on NVIDIA Jetson: benchmark tests on a micro aerial vehicle[J]. IEEE Robotics and Automation Letters, 2021, 6(3):5332-5339. 10.1109/lra.2021.3075141 |
| 16 | MA S J, BAI X H, WANG Y L, et al. Robust stereo visual-inertial odometry using nonlinear optimization[J]. Sensors, 2019, 19(17): No.3747. 10.3390/s19173747 |
| 17 | SUN K, MOHTA K, PFROMMER B, et al. Robust stereo visual inertial odometry for fast autonomous flight[J]. IEEE Robotics and Automation Letters, 2018, 3(2): 965-972. 10.1109/lra.2018.2793349 |
| 18 | ZENG Q X, LIU D H, LV C D. UWB/binocular VO fusion algorithm based on adaptive Kalman filter[J]. Sensors, 2019, 19(18): No.4044. 10.3390/s19184044 |
| 19 | SHAUKAT N, ALI A, JAVED IQBAL M, et al. Multi-sensor fusion for underwater vehicle localization by augmentation of RBF neural network and error-state Kalman filter[J]. Sensors, 2021, 21(4): No.1149. 10.3390/s21041149 |
| 20 | MADYASTHA V, RAVINDRA V, MALLIKARJUNAN S. Extended-Kalman filter vs. error state Kalman filter for aircraft attitude estimation[C]// Proceedings of the 2011 AIAA Guidance, Navigation, and Control Conference. Reston, VA: AIAA, 2011: No.6615. 10.2514/6.2011-6615 |
| [1] | Lu ZHANG, Jiapeng LIU, Dongmei TIAN. Application of Stacking-Bagging-Vote multi-source information fusion model for financial early warning [J]. Journal of Computer Applications, 2022, 42(1): 280-286. |
| [2] | LI Kairong, LIU Shuang, HU Qianqian, TANG Yiyuan. Improved ant colony optimization algorithm for path planning based on turning angle constraint [J]. Journal of Computer Applications, 2021, 41(9): 2560-2568. |
| [3] | LU Guoqing, SUN Hao. Two-dimensional mapping of swarm robot based on random walk [J]. Journal of Computer Applications, 2021, 41(7): 2121-2127. |
| [4] | LUAN Jianing, ZHANG Wei, SUN Wei, ZHANG Ao, HAN Dong. High-accuracy localization algorithm based on fusion of two-dimensional code vision and laser lidar [J]. Journal of Computer Applications, 2021, 41(5): 1484-1491. |
| [5] | Erchao LI, Kuankuan QI. Robot path planning based on B-spline curve and ant colony algorithm [J]. Journal of Computer Applications, 2021, 41(12): 3558-3564. |
| [6] | ZHANG Jianming, SHI Yuanhao, XU Zhengyi, WEI Jianming. Adaptive UWB/PDR fusion positioning algorithm based on error prediction [J]. Journal of Computer Applications, 2020, 40(6): 1755-1762. |
| [7] | LIU Ang, JIANG Jin, XU Kefeng. Robot path planning based on improved ant colony and pigeon inspired optimization algorithm [J]. Journal of Computer Applications, 2020, 40(11): 3366-3372. |
| [8] | WANG Shouhua, LI Yunke, SUN Xiyan, JI Yuanfa. Dual-antenna attitude determination algorithm based on low-cost receiver [J]. Journal of Computer Applications, 2019, 39(8): 2381-2385. |
| [9] | ZHANG Bang, ZHU Jinxin, XU Zhengyi, LIU Pan, WEI Jianming. Bayesian network-based floor localization algorithm [J]. Journal of Computer Applications, 2019, 39(8): 2468-2474. |
| [10] | WANG Kun, ZENG Guohui, LU Dunke, HUANG Bo, LI Xiaobin. Path planning of mobile robot based on improved asymptotically-optimal bidirectional rapidly-exploring random tree algorithm [J]. Journal of Computer Applications, 2019, 39(5): 1312-1317. |
| [11] | CHEN Ruonan, WEN Congcong, PENG Ling, YOU Chengzeng. Application of improved A* algorithm in indoor path planning for mobile robot [J]. Journal of Computer Applications, 2019, 39(4): 1006-1011. |
| [12] | HUANG Chao, LIANG Shengtao, ZHANG Yi, ZHANG Jie. Path planning of mobile robot based on multi-objective grasshopper optimization algorithm [J]. Journal of Computer Applications, 2019, 39(10): 2859-2864. |
| [13] | DING Jianli, MU Tao, WANG Huaichao. Fast indoor positioning algorithm of airport terminal based on spectral regression kernel discriminant analysis [J]. Journal of Computer Applications, 2019, 39(1): 256-261. |
| [14] | TANG Qi, HE Lamei. Unscented Kalman filtering method with nonlinear equality constraint [J]. Journal of Computer Applications, 2018, 38(5): 1481-1487. |
| [15] | LUO Rui, SHI Wuxi, LI Baoquan. Active disturbance rejection control for mobile robot with skidding and slipping [J]. Journal of Computer Applications, 2018, 38(5): 1517-1522. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||