


Journal of Computer Applications ›› 2023, Vol. 43 ›› Issue (12): 3806-3815.DOI: 10.11772/j.issn.1001-9081.2022121882
• Advanced computing • Previous Articles Next Articles
Junyan LIU1, Feibo JIANG1( ), Yubo PENG1, Li DONG2
), Yubo PENG1, Li DONG2
Received:2022-12-22
Revised:2023-03-15
Accepted:2023-03-17
Online:2023-04-04
Published:2023-12-10
Contact:
Feibo JIANG
About author:LIU Junyan, born in 1998, M. S. candidate. His research interests include deep learning, combinatorial optimization.Supported by:通讯作者:
江沸菠
作者简介:柳隽琰(1998—),男,湖南岳阳人,硕士研究生,主要研究方向:深度学习、组合优化基金资助:CLC Number:
Junyan LIU, Feibo JIANG, Yubo PENG, Li DONG. Multi-objective optimization model for unmanned aerial vehicles trajectory based on decomposition and trajectory search[J]. Journal of Computer Applications, 2023, 43(12): 3806-3815.
柳隽琰, 江沸菠, 彭于波, 董莉. 基于分解法与轨迹搜索的无人机群轨迹多目标优化模型[J]. 《计算机应用》唯一官方网站, 2023, 43(12): 3806-3815.
Add to citation manager EndNote|Ris|BibTeX
URL: http://www.joca.cn/EN/10.11772/j.issn.1001-9081.2022121882
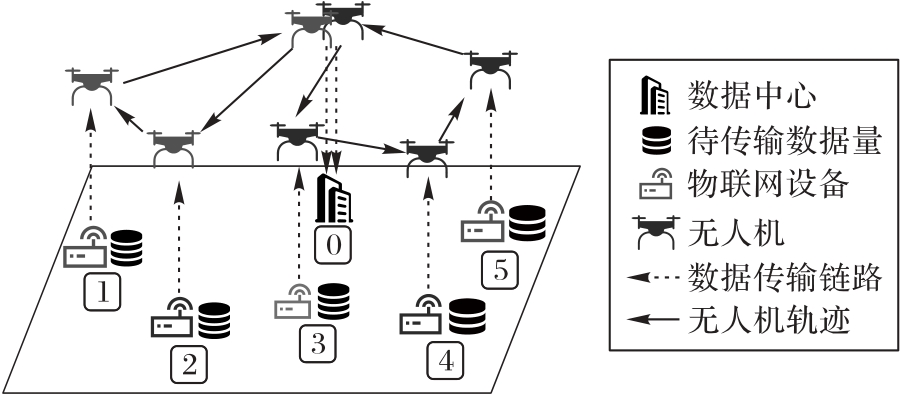
Fig.1 Multi-UAV-assisted data collection system
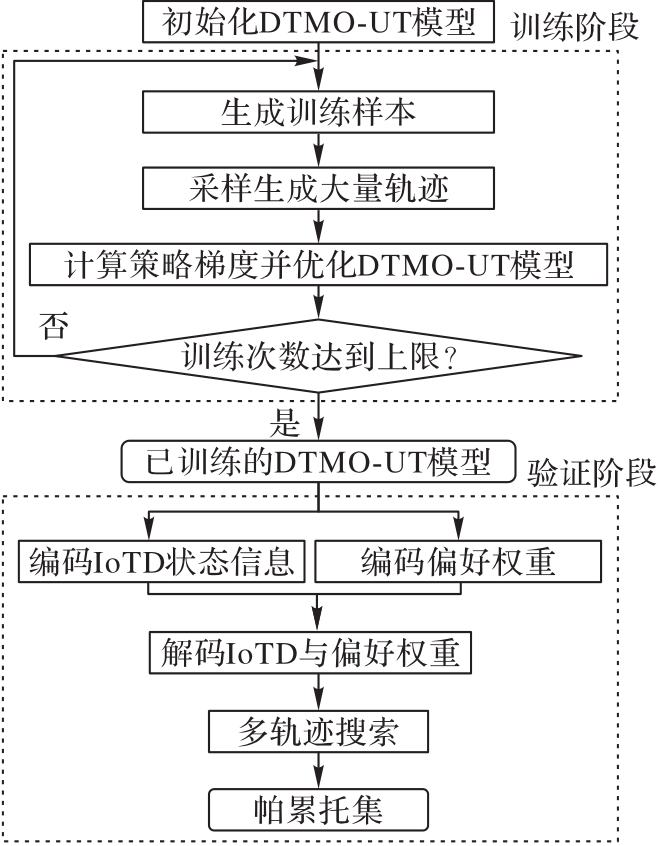
Fig.2 Flowchart of training and validation of DTMO-UT model
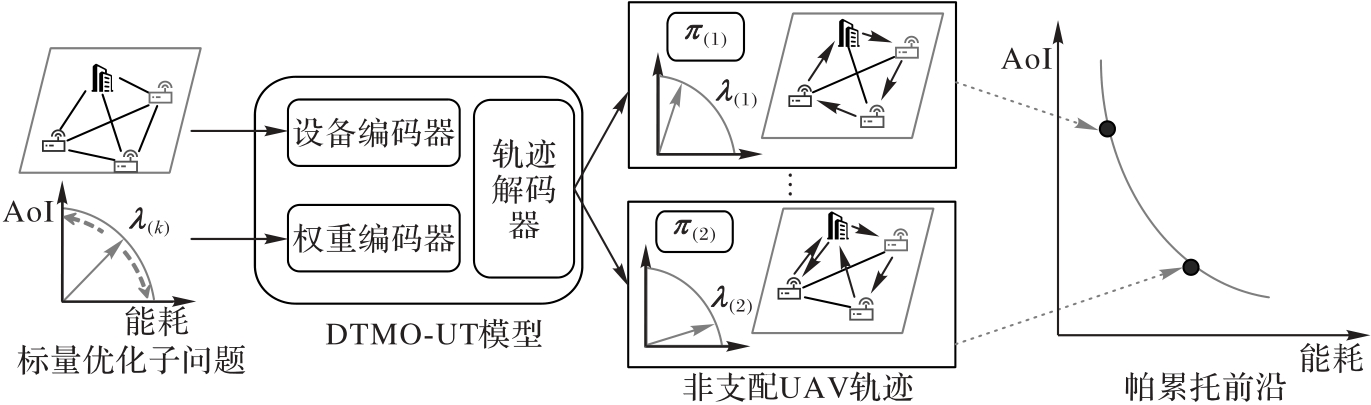
Fig.3 Process of obtaining Pareto frontier by DTMO-UT model

Fig.4 Structure of DTMO-UT model
| 模型 | 参数量/ | 子问题数 |
|---|---|---|
| MODRL/D-AM | 131.3 | 固定 |
| DTMO-UT | 1.6 | 不固定 |
Tab.1 Comparison of parameter quantities and solvable sub-problems
| 模型 | 参数量/ | 子问题数 |
|---|---|---|
| MODRL/D-AM | 131.3 | 固定 |
| DTMO-UT | 1.6 | 不固定 |
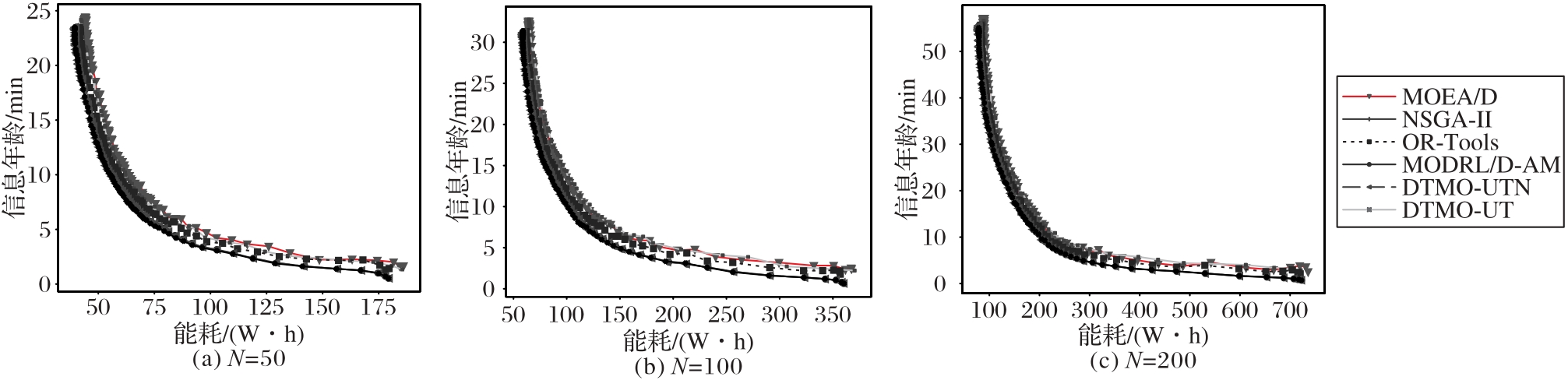
Fig. 5 Comparisons of Pareto frontiers obtained by all methods in different scenarios
| 模型 | ||
|---|---|---|
| MOEA/D | 1.015 6 | 114.917 1 |
| NSGA-Ⅱ | 1.502 4 | 110.569 7 |
| OR-Tools | 0.998 5 | 114.070 3 |
| MODRL/D-AM | 0.997 3 | 116.391 8 |
| DTMO-UTN | 0.995 1 | 116.427 3 |
| DTMO-UT | 0.987 9 | 116.557 8 |
Tab.2 Comparison of distribution and ductility indicators
| 模型 | ||
|---|---|---|
| MOEA/D | 1.015 6 | 114.917 1 |
| NSGA-Ⅱ | 1.502 4 | 110.569 7 |
| OR-Tools | 0.998 5 | 114.070 3 |
| MODRL/D-AM | 0.997 3 | 116.391 8 |
| DTMO-UTN | 0.995 1 | 116.427 3 |
| DTMO-UT | 0.987 9 | 116.557 8 |
| 模型 | HV值 | 运算 时间/s | |||
|---|---|---|---|---|---|
| 最大值 | 最小值 | 平均值 | 标准差 | ||
| MOEA/D | 0.376 4 | 0.309 6 | 0.343 9 | 0.016 9 | 3 616.04 |
| NSGA-Ⅱ | 0.375 9 | 0.308 2 | 0.331 4 | 0.016 3 | 1 873.26 |
| OR-Tools | 0.394 3 | 0.349 6 | 0.377 6 | 0.008 3 | 503.19 |
| MODRL/D-AM | 0.433 1 | 0.399 8 | 0.417 4 | 0.008 1 | 101.97 |
| DTMO-UTN | 0.435 4 | 0.394 3 | 0.419 2 | 0.009 4 | 108.74 |
| DTMO-UT | 0.4395 | 0.4070 | 0.4245 | 0.0079 | 114.06 |
Tab.3 Comparison of maximum, minimum, average andstandard deviation of HV value as well as algorithm running time
| 模型 | HV值 | 运算 时间/s | |||
|---|---|---|---|---|---|
| 最大值 | 最小值 | 平均值 | 标准差 | ||
| MOEA/D | 0.376 4 | 0.309 6 | 0.343 9 | 0.016 9 | 3 616.04 |
| NSGA-Ⅱ | 0.375 9 | 0.308 2 | 0.331 4 | 0.016 3 | 1 873.26 |
| OR-Tools | 0.394 3 | 0.349 6 | 0.377 6 | 0.008 3 | 503.19 |
| MODRL/D-AM | 0.433 1 | 0.399 8 | 0.417 4 | 0.008 1 | 101.97 |
| DTMO-UTN | 0.435 4 | 0.394 3 | 0.419 2 | 0.009 4 | 108.74 |
| DTMO-UT | 0.4395 | 0.4070 | 0.4245 | 0.0079 | 114.06 |
| 1 | CUI Q, WANG Y, CHEN K-C, et al. Big data analytics and network calculus enabling intelligent management of autonomous vehicles in a smart city [J]. IEEE Internet of Things Journal, 2019, 6(2): 2021-2034. 10.1109/jiot.2018.2872442 |
| 2 | VERMA P, SOOD S K. Fog assisted-IoT enabled patient health monitoring in smart homes [J]. IEEE Internet of Things Journal, 2018, 5(3): 1789-1796. 10.1109/jiot.2018.2803201 |
| 3 | PATHAK N, DEB P K, MUKHERJEE A, et al. IoT-to-the-rescue: A survey of IoT solutions for COVID-19-like pandemics [J]. IEEE Internet of Things Journal, 2021, 8(17): 13145-13164. 10.1109/jiot.2021.3082838 |
| 4 | HU H, XIONG K, QU G, et al. AoI-minimal trajectory planning and data collection in UAV-assisted wireless powered IoT networks [J]. IEEE Internet of Things Journal, 2021, 8(2): 1211-1223. 10.1109/jiot.2020.3012835 |
| 5 | YATES R D, SUN Y, BROWN D R, et al. Age of information: An introduction and survey [J]. IEEE Journal on Selected Areas in Communications, 2021, 39(5): 1183-1210. 10.1109/jsac.2021.3065072 |
| 6 | CHEN Z, CHI K, ZHENG K, et al. Minimization of transmission completion time in UAV-enabled wireless powered communication networks [J]. IEEE Internet of Things Journal, 2020, 7(2): 1245-1259. 10.1109/jiot.2019.2953691 |
| 7 | BOZORGCHENANI A, MASHHADI F, TARCHI D, et al. Multi-objective computation sharing in energy and delay constrained mobile edge computing environments [J]. IEEE Transactions on Mobile Computing, 2021, 20(10): 2992-3005. 10.1109/tmc.2020.2994232 |
| 8 | LIAO Y, FRIDERIKOS V. Energy and age Pareto optimal trajectories in UAV-assisted wireless data collection [J]. IEEE Transactions on Vehicular Technology, 2022, 71(8): 9101-9106. 10.1109/tvt.2022.3175318 |
| 9 | LIN X, YANG Z, ZHANG Q. Pareto set learning for neural multi-objective combinatorial optimization [EB/OL]. (2022-03-29) [2022-08-10]. . |
| 10 | HELSGAUN K. An effective implementation of the Lin–Kernighan traveling salesman heuristic [J]. European Journal of Operational Research, 2000, 126(1): 106-130. 10.1016/s0377-2217(99)00284-2 |
| 11 | 肖晓伟, 肖迪, 林锦国, 等. 多目标优化问题的研究概述[J]. 计算机应用研究, 2011, 28(3): 805-808, 827. 10.3969/j.issn.1001-3695.2011.03.002 |
| XIAO X W, XIAO D, LIN J G, et al. Overview on multi-objective optimization problem research [J]. Application Research of Computers, 2011, 28(3): 805-808,827. 10.3969/j.issn.1001-3695.2011.03.002 | |
| 12 | FLORIOS K, MAVROTAS G. Generation of the exact Pareto set in multi-objective traveling salesman and set covering problems [J]. Applied Mathematics and Computation, 2014, 237: 1-19. 10.1016/j.amc.2014.03.110 |
| 13 | SRINIVAS N, DEB K. Muiltiobjective optimization using nondominated sorting in genetic algorithms [J]. Evolutionary Computation, 1994, 2(3): 221-248. 10.1162/evco.1994.2.3.221 |
| 14 | DEB K, PRATAP A, AGARWAL S, et al. A fast and elitist multiobjective genetic algorithm: NSGA‑Ⅱ [J]. IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182-197. 10.1109/4235.996017 |
| 15 | GHAMBARI S, GOLABI M, LEPAGNOT J, et al. An enhanced NSGA‑Ⅱ for multiobjective UAV path planning in urban environments[C]// Proceedings of the 2020 IEEE 32nd International Conference on Tools with Artificial Intelligence. Piscataway: IEEE, 2020: 106-111. 10.1109/ictai50040.2020.00027 |
| 16 | ZHANG Q, LI H. MOEA/D: A multiobjective evolutionary algorithm based on decomposition [J]. IEEE Transactions on Evolutionary Computation, 2007, 11(6): 712-731. 10.1109/tevc.2007.892759 |
| 17 | 周爱民,张青富,张桂戌.一种基于混合高斯模型的多目标进化算法 [J]. 软件学报, 2014, 25(5): 913-928. 10.13328/j.cnki.jos.004514 |
| ZHOU A M, ZHANG Q F, ZHANG G X. Multi-objective evolutionary algorithm based on mixed Gaussian models[J]. Journal of Software, 2014, 25(5): 913-928. 10.13328/j.cnki.jos.004514 | |
| 18 | 侯薇, 董红斌, 印桂生.一种改进的基于分解的多目标进化算法[J]. 计算机科学, 2014, 41(2): 114-118. 10.3969/j.issn.1002-137X.2014.02.025 |
| HOU W, DONG H B, YIN G S. Enhanced multi-objective evolutionary algorithm based on decomposition [J]. Computer Science, 2014, 41(2): 114-118. 10.3969/j.issn.1002-137X.2014.02.025 | |
| 19 | LAURENT P, VINCENT F. OR-Tools [EB/OL]. (2022-11-25) [2023-11-29]. . |
| 20 | COOK W. Concorde [EB/OL]. (2003-11-05) [2022-12-05]. . |
| 21 | GU Z H, ROTHBERG E, BIXBY R. Gurobi [EB/OL]. (2021-11-16) [2022-12-05]. . |
| 22 | SUTSKEVER I, VINYALS O, LE Q V. Sequence to sequence learning with neural networks [C]// Proceedings of the 27th International Conference on Neural Information Processing Systems-Volume 2. New York: ACM, 2014: 3104-3112. |
| 23 | VINYALS O, FORTUNATO M, JAITLY N. Pointer networks [C]// Proceedings of the 28th International Conference on Neural Information Processing Systems-Volume 2. New York: ACM, 2015: 2692-2700. |
| 24 | KOOL W, VAN HOOF H, Attention WELLING M., learn to solve routing problems! [EB/OL]. (2018-03-22) [2022-08-29]. |
| 25 | LI K, ZHANG T, WANG R. Deep reinforcement learning for multiobjective optimization [J]. IEEE Transactions on Cybernetics, 2021, 51(6): 3103-3114. 10.1109/tcyb.2020.2977661 |
| 26 | WU H, WANG J, ZHANG Z. MODRL/D-AM: multiobjective deep reinforcement learning algorithm using decomposition and attention model for multiobjective optimization [C]// Proceedings of the 11th International Symposium on Artificial Intelligence Algorithms and Applications. Singapore: Springer, 2020: 575-589. 10.1007/978-981-15-5577-0_45 |
| 27 | ZHANG Y, WANG J, ZHANG Z, et al. MODRL/D-EL: multiobjective deep reinforcement learning with evolutionary learning for multiobjective optimization [C]// Proceedings of the 2021 International Joint Conference on Neural Networks. Piscataway: IEEE, 2021: 1-8. 10.1109/ijcnn52387.2021.9534083 |
| 28 | 董健, 钦文雯, 李莹娟, 等. 基于改进反向传播神经网络代理模型的快速多目标天线设计[J]. 电子与信息学报, 2018, 40(11): 2712-2719. 10.11999/JEIT180025 |
| DONG J, QIN W W, LI Y J, et al. Fast multi-objective antenna design based on improved back propagation neural network surrogate model [J]. Journal of Electronics & Information Technology, 2018, 40(11): 2712-2719. 10.11999/JEIT180025 | |
| 29 | 黄博南, 王勇, 李玉帅, 等. 基于分布式神经动态优化的综合能源系统多目标优化调度[J]. 自动化学报, 2022, 48(7): 1718-1736. |
| HUANG B N, WANG Y, LI Y S, et al. Multi-objective optimal scheduling of integrated energy systems based on distributed neurodynamic optimization [J]. Acta Automatica Sinica, 2022, 48(7): 1718-1736. | |
| 30 | KWON Y D, CHOO J, KIM B, et al. POMO: policy optimization with multiple optima for reinforcement learning [J]. Advances in Neural Information Processing Systems, 2020, 33: 21188-21198. |
| 31 | DAI H, KHALIL E, ZHANG Y, et al. Learning combinatorial optimization algorithms over graphs [C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 6351-6361. |
| 32 | YANG L, WANG S, CHEN X, et al. High-fidelity permeability and porosity prediction using deep learning with the self-attention mechanism [J]. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(7): 3429-3443. 10.1109/tnnls.2022.3157765 |
| 33 | NAIR V, HINTON G E. Rectified linear units improve restricted Boltzmann machines[C]// Proceedings of the 27th International Conference on Machine Learning. New York: ACM, 2010: 807-814. |
| 34 | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need [J]. Advances in Neural Information Processing Systems, 2017, 30: 6000-6010. |
| 35 | KATHAROPOULOS A, VYAS A, PAPPAS N, et al. Transformers are RNNs: fast autoregressive transformers with linear attention[C]// Proceedings of the 37th International Conference on Machine Learning. New York: ACM, 2020: 5156-5165. |
| 36 | D-A CLEVERT, UNTERTHINER T, HOCHREITER S. Fast and accurate deep network learning by exponential linear units (ELUs) [EB/OL]. (2015-11-23) [2022-12-26]. . |
| 37 | FANELLO S R, NOCETI N, CILIBERTO C, et al. Ask the image: supervised pooling to preserve feature locality [C]// Proceedings of the 27th IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2014: 851-858. 10.1109/cvpr.2014.114 |
| 38 | WILLIAMS R J. Simple statistical gradient-following algorithms for connectionist reinforcement learning[J]. Machine Learning, 1992, 8: 229-256. 10.1007/bf00992696 |
| 39 | ISHIBUCHI H, SAKANE Y, TSUKAMOTO N, et al. Adaptation of scalarizing functions in MOEA/D: an adaptive scalarizing function-based multiobjective evolutionary algorithm [C]// Proceedings of the 2009 International Conference on Evolutionary Multi-Criterion Optimization. Berlin: Springer, 2009: 438-452. 10.1007/978-3-642-01020-0_35 |
| 40 | NAZARI M, OROOJLOOY A, TAKÁČ M, et al. Reinforcement learning for solving the vehicle routing problem [C]// Proceedings of the 32nd International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2018: 9861-9871. 10.1109/aidas47888.2019.8970890 |
| 41 | RIQUELME N, VON LÜCKEN C, BARAN B. Performance metrics in multi-objective optimization [C]// Proceedings of the 41st Latin American Computing Conference. Piscataway: IEEE, 2015: 1-11. 10.1109/clei.2015.7360024 |
| 42 | ZITZLER E, THIELE L, LAUMANNS M, et al. Performance assessment of multiobjective optimizers: an analysis and review [J]. IEEE Transactions on Evolutionary Computation, 2003, 7(2): 117-132. 10.1109/tevc.2003.810758 |
| [1] | Saijuan XU, Zhenyu PEI, Jiawei LIN, Genggeng LIU. Constrained multi-objective evolutionary algorithm based on multi-stage search [J]. Journal of Computer Applications, 2023, 43(8): 2345-2351. |
| [2] | Min LIANG, Jiayi LIU, Jie LI. Image super-resolution reconstruction method based on iterative feedback and attention mechanism [J]. Journal of Computer Applications, 2023, 43(7): 2280-2287. |
| [3] | Kejun JIN, Hongtao YU, Yiteng WU, Shaomei LI, Jianpeng ZHANG, Honghao ZHENG. Improved defense method for graph convolutional network based on singular value decomposition [J]. Journal of Computer Applications, 2023, 43(5): 1511-1517. |
| [4] | Jin XIA, Zhengqun WANG, Shiming ZHU. Traffic flow prediction model based on time series decomposition [J]. Journal of Computer Applications, 2023, 43(4): 1129-1135. |
| [5] | Canghong JIN, Yuhua SHAO, Qinfang HE. Long-tail recommendation model based on adaptive group reranking [J]. Journal of Computer Applications, 2023, 43(4): 1122-1128. |
| [6] | Zhenliang LI, Bo LI. Improved method of convolution neural network based on matrix decomposition [J]. Journal of Computer Applications, 2023, 43(3): 685-691. |
| [7] | Chunfeng LIU, Zheng LI, Jufeng WANG. Multi-objective optimization of minicells in distributed factories [J]. Journal of Computer Applications, 2023, 43(12): 3824-3832. |
| [8] | Linkai HAN, Jiangwei YAO, Kunfeng WANG. Visible and infrared image fusion by preserving gradients and contours [J]. Journal of Computer Applications, 2023, 43(11): 3574-3578. |
| [9] | Erchao LI, Shenghui ZHANG. Dynamic multi-objective optimization algorithm based on adaptive prediction of new evaluation index [J]. Journal of Computer Applications, 2023, 43(10): 3178-3187. |
| [10] | LI Xingjia, YANG Qiuhui, HONG Mei, PAN Chunxia, LIU Ruihang. Test case prioritization approach based on historical data and multi-objective optimization [J]. Journal of Computer Applications, 2023, 43(1): 221-226. |
| [11] | MA Yanfang, ZHANG Wen, LI Zongmin, YAN Fang, GUO Lingyun. Two-echelon location-routing model and algorithm for waste recycling considering obnoxious effect [J]. Journal of Computer Applications, 2023, 43(1): 289-298. |
| [12] | Fengting ZHANG, Juhua YANG, Jinhui REN, Kun JIN. Container throughput prediction based on optimal variational mode decomposition and kernel extreme learning machine [J]. Journal of Computer Applications, 2022, 42(8): 2333-2342. |
| [13] | Bao CHEN, Zupeng ZHOU, Huan WEI, Yanzhao LYU, Zhicheng SUI. Control method of quadrotor UAV with manipulator based on expert PID [J]. Journal of Computer Applications, 2022, 42(8): 2637-2642. |
| [14] | Xiangyu ZHANG, Yang YANG, Guohui FENG, Chuan QIN. Reversible data hiding in encrypted image based on multi-objective optimization [J]. Journal of Computer Applications, 2022, 42(6): 1716-1723. |
| [15] | Jinquan ZHANG, Shouwei XU, Xincheng LI, Chongyang WANG, Jingzhi XU. Cloud computing task scheduling based on orthogonal adaptive whale optimization [J]. Journal of Computer Applications, 2022, 42(5): 1516-1523. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||