


Journal of Computer Applications ›› 2024, Vol. 44 ›› Issue (8): 2558-2570.DOI: 10.11772/j.issn.1001-9081.2023081121
• Multimedia computing and computer simulation • Previous Articles Next Articles
Wentao JIANG1, Wanxuan LI1( ), Shengchong ZHANG2
), Shengchong ZHANG2
Received:2023-08-21
Revised:2023-11-07
Accepted:2023-11-15
Online:2023-12-18
Published:2024-08-10
Contact:
Wanxuan LI
About author:JIANG Wentao, born in 1986, Ph. D., associate professor. His research interests include image processing, pattern recognition, deep learning.Supported by:
姜文涛1, 李宛宣1(), 张晟翀2
通讯作者:
李宛宣
作者简介:姜文涛(1986—),男,辽宁大连人,副教授,博士,主要研究方向:图像处理、模式识别、深度学习基金资助:CLC Number:
Wentao JIANG, Wanxuan LI, Shengchong ZHANG. Correlation filtering based target tracking with nonlinear temporal consistency[J]. Journal of Computer Applications, 2024, 44(8): 2558-2570.
姜文涛, 李宛宣, 张晟翀. 非线性时间一致性的相关滤波目标跟踪[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2558-2570.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2023081121

Fig. 1 Tracking effect comparison between LADCF algorithm and human vision
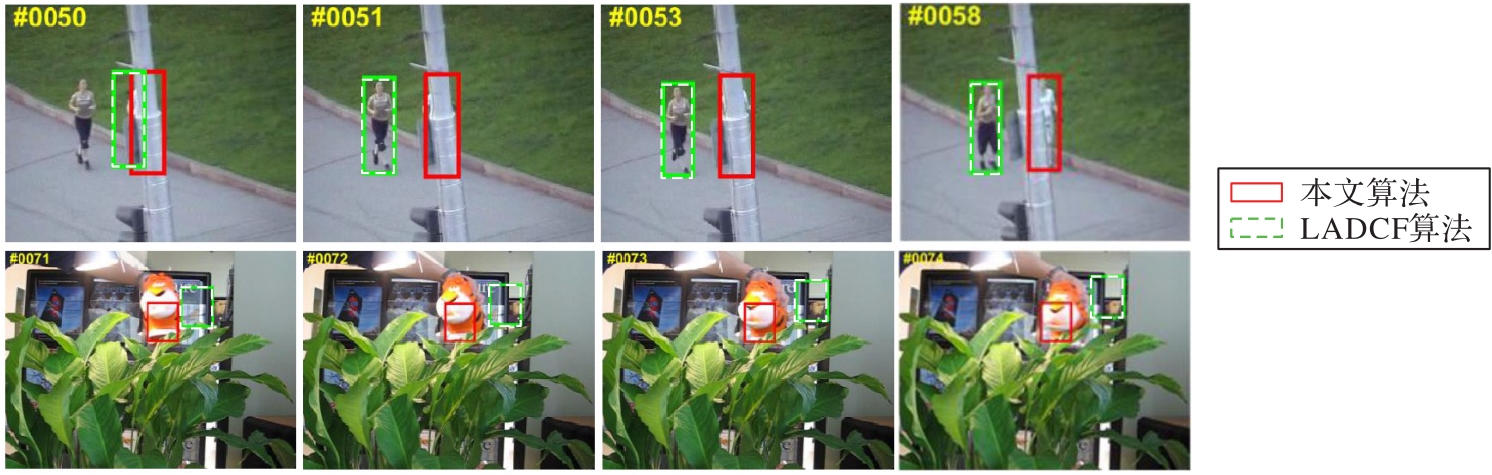
Fig. 2 Comparison of tracking effects between proposed algorithm and LADCF algorithm
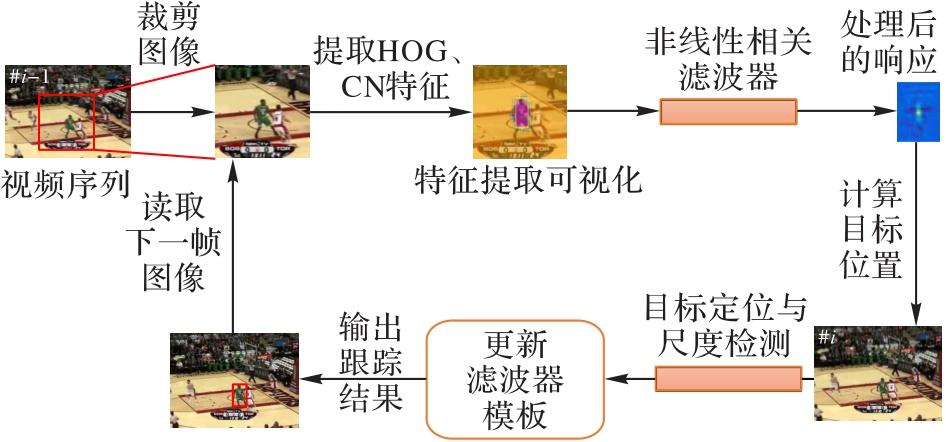
Fig. 3 Framework of proposed algorithm
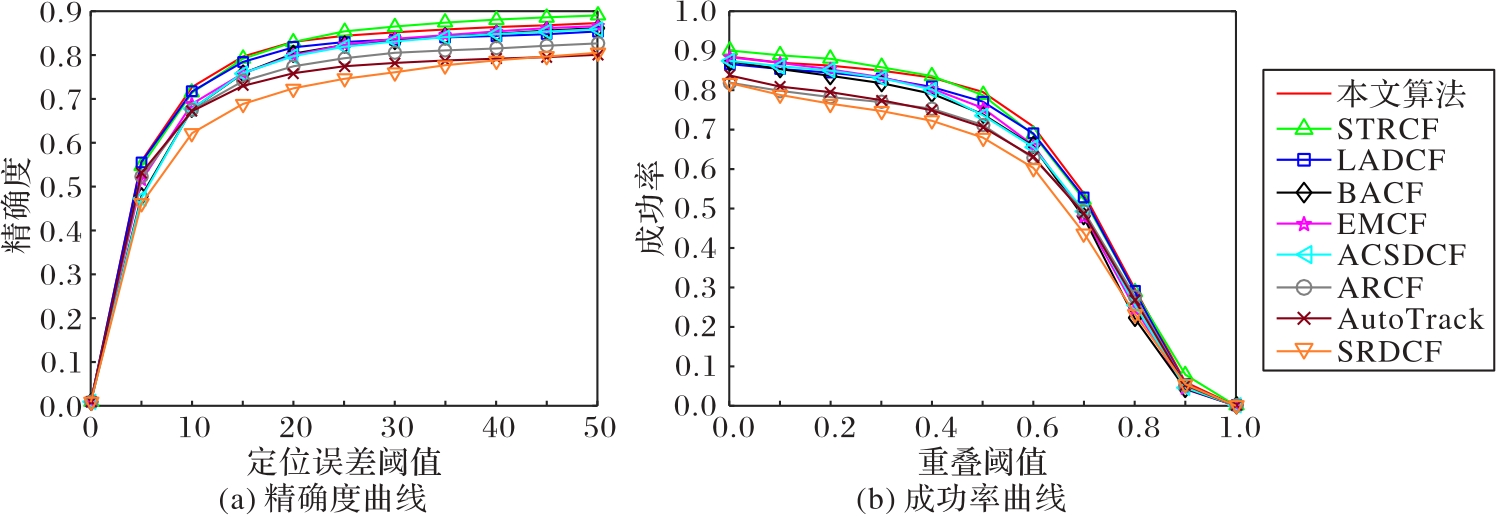
Fig. 4 Quantitative comparison results of various algorithms on OTB50
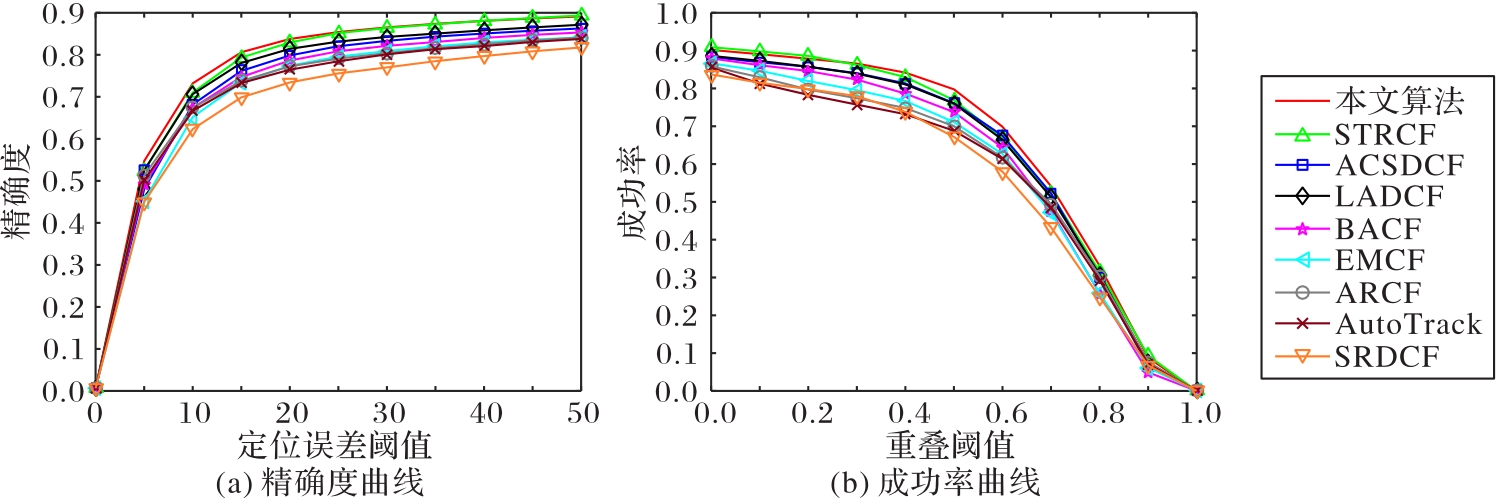
Fig. 5 Quantitative comparison results of various algorithms on OTB100
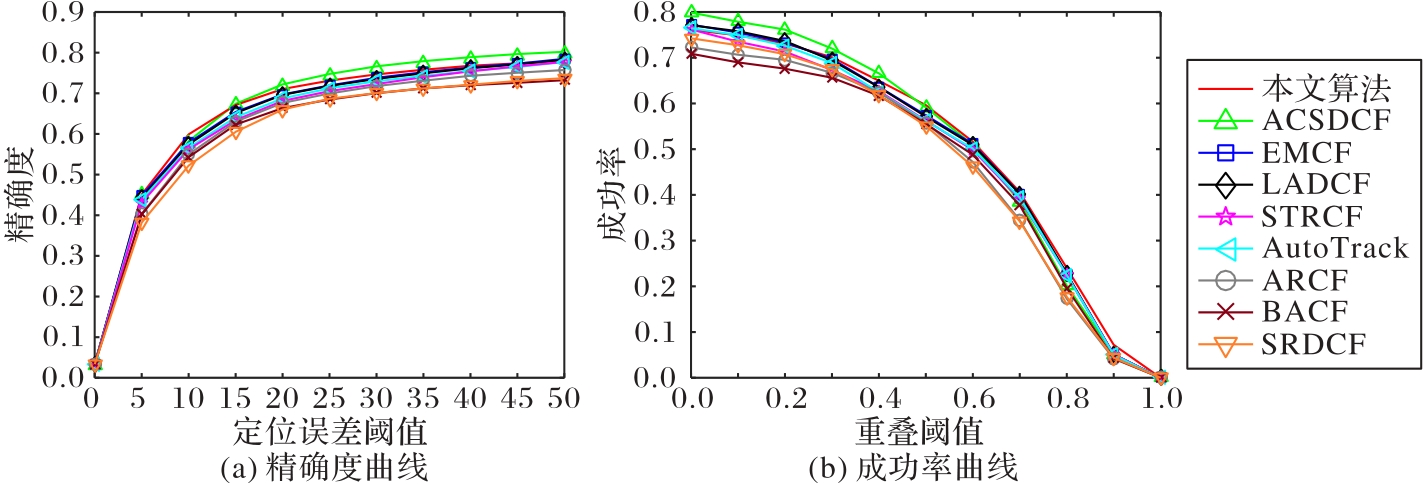
Fig. 6 Quantitative comparison resutls of various algorithms on UAV123

Fig. 7 Quantitative comparison results of various algorithms on DTB70
| 算法 | OTB50数据集 | OTB100数据集 | UAV123数据集 | DTB70数据集 | ||||
|---|---|---|---|---|---|---|---|---|
| DP | AUC | DP | AUC | DP | AUC | DP | AUC | |
| 本文算法 | 0.830 | 0.796 | 0.838 | 0.798 | 0.711 | 0.596 | 0.689 | 0.482 |
| STRCF算法 | 0.830 | 0.788 | 0.829 | 0.769 | 0.681 | 0.563 | 0.670 | 0.472 |
| LADCF算法 | 0.818 | 0.771 | 0.814 | 0.760 | 0.696 | 0.571 | 0.660 | 0.454 |
| EMCF算法 | 0.803 | 0.739 | 0.774 | 0.711 | 0.697 | 0.574 | 0.719 | 0.496 |
| BACF算法 | 0.800 | 0.755 | 0.786 | 0.738 | 0.664 | 0.555 | 0.582 | 0.398 |
| ACSDCF算法 | 0.798 | 0.737 | 0.799 | 0.761 | 0.719 | 0.591 | 0.649 | 0.437 |
| AutoTrack算法 | 0.744 | 0.707 | 0.765 | 0.688 | 0.688 | 0.562 | 0.717 | 0.479 |
| ARCF算法 | 0.759 | 0.712 | 0.773 | 0.700 | 0.660 | 0.557 | 0.629 | 0.428 |
| SRDCF算法 | 0.724 | 0.680 | 0.734 | 0.672 | 0.676 | 0.551 | 0.512 | 0.363 |
Tab. 1 Quantitative comparison results of various algorithms on 4 standard datasets
| 算法 | OTB50数据集 | OTB100数据集 | UAV123数据集 | DTB70数据集 | ||||
|---|---|---|---|---|---|---|---|---|
| DP | AUC | DP | AUC | DP | AUC | DP | AUC | |
| 本文算法 | 0.830 | 0.796 | 0.838 | 0.798 | 0.711 | 0.596 | 0.689 | 0.482 |
| STRCF算法 | 0.830 | 0.788 | 0.829 | 0.769 | 0.681 | 0.563 | 0.670 | 0.472 |
| LADCF算法 | 0.818 | 0.771 | 0.814 | 0.760 | 0.696 | 0.571 | 0.660 | 0.454 |
| EMCF算法 | 0.803 | 0.739 | 0.774 | 0.711 | 0.697 | 0.574 | 0.719 | 0.496 |
| BACF算法 | 0.800 | 0.755 | 0.786 | 0.738 | 0.664 | 0.555 | 0.582 | 0.398 |
| ACSDCF算法 | 0.798 | 0.737 | 0.799 | 0.761 | 0.719 | 0.591 | 0.649 | 0.437 |
| AutoTrack算法 | 0.744 | 0.707 | 0.765 | 0.688 | 0.688 | 0.562 | 0.717 | 0.479 |
| ARCF算法 | 0.759 | 0.712 | 0.773 | 0.700 | 0.660 | 0.557 | 0.629 | 0.428 |
| SRDCF算法 | 0.724 | 0.680 | 0.734 | 0.672 | 0.676 | 0.551 | 0.512 | 0.363 |
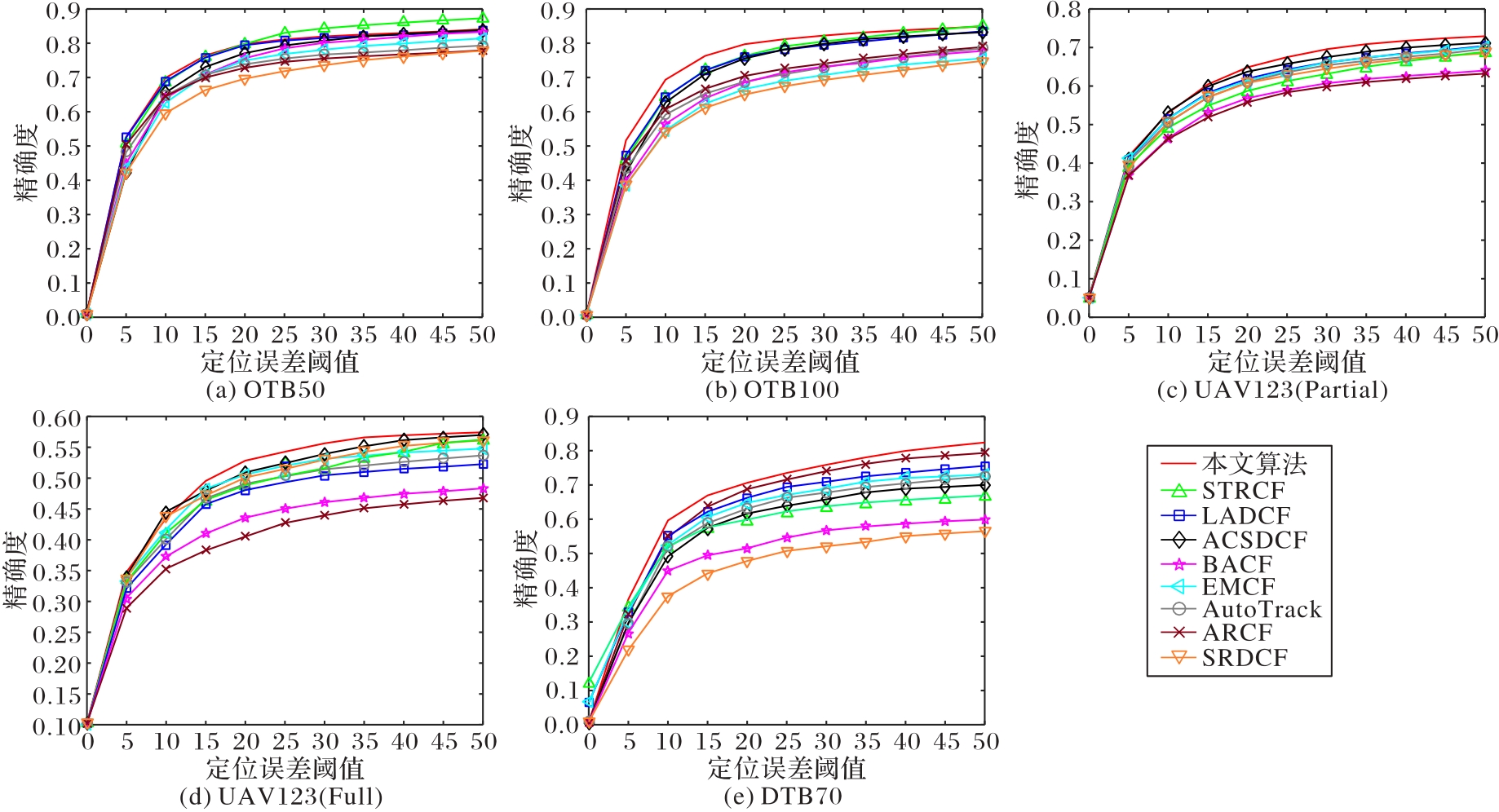
Fig. 8 Precision curves of various tracking algorithms for occlusion sequence
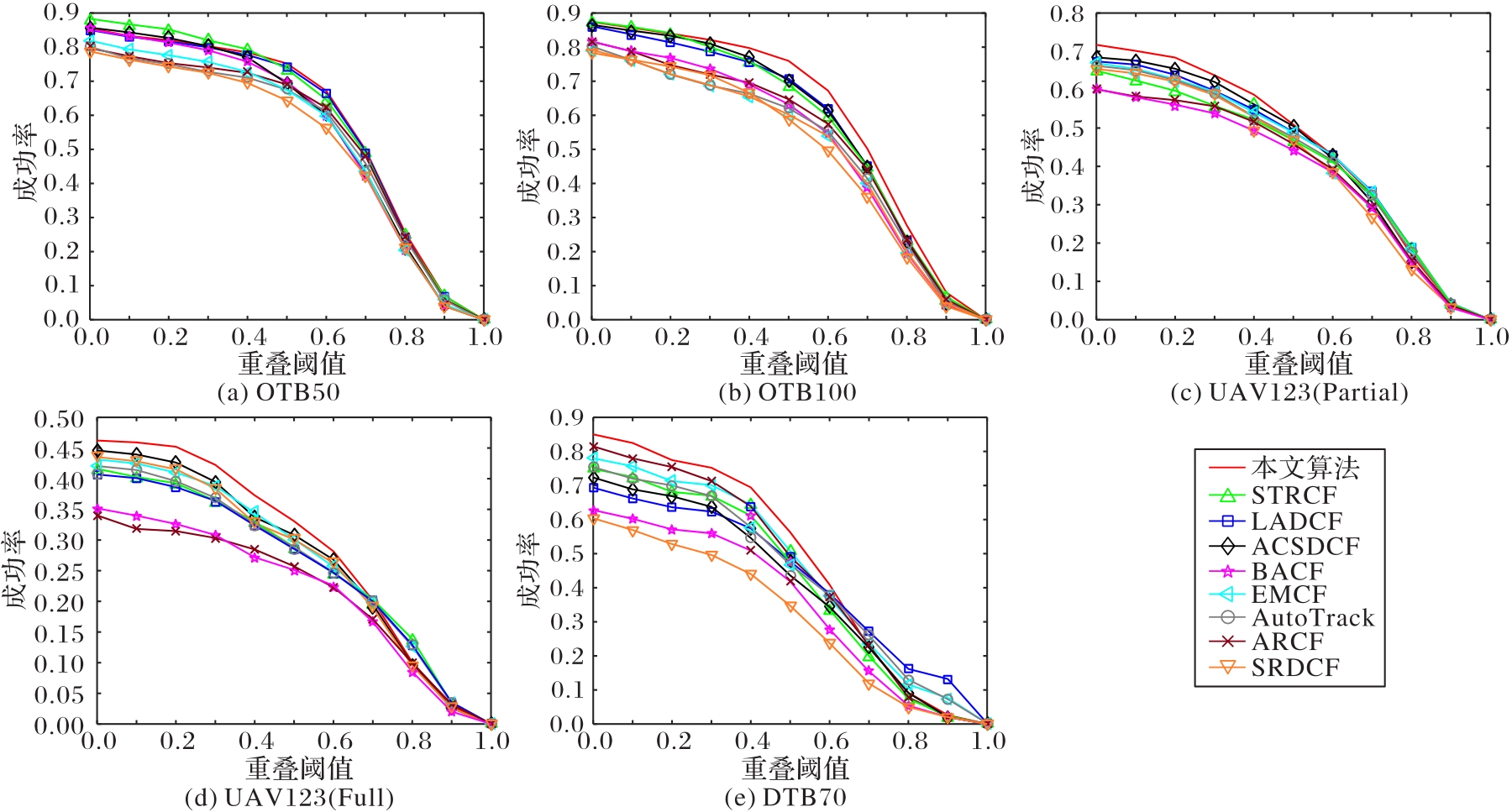
Fig. 9 Success rate curves of various tracking algorithms for occlusion sequence
| 算法 | OTB50数据集 | OTB100数据集 | UAV123数据集(Partail) | UAV123数据集(Full) | DTB70数据集 | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| DP | AUC | DP | AUC | DP | AUC | DP | AUC | DP | AUC | |
| 本文算法 | 0.798 | 0.752 | 0.797 | 0.760 | 0.645 | 0.506 | 0.518 | 0.321 | 0.706 | 0.476 |
| STRCF算法 | 0.798 | 0.736 | 0.763 | 0.689 | 0.587 | 0.468 | 0.488 | 0.289 | 0.599 | 0.425 |
| LADCF算法 | 0.794 | 0.743 | 0.761 | 0.707 | 0.619 | 0.489 | 0.481 | 0.285 | 0.663 | 0.434 |
| EMCF算法 | 0.750 | 0.675 | 0.666 | 0.602 | 0.614 | 0.488 | 0.506 | 0.301 | 0.648 | 0.449 |
| BACF算法 | 0.756 | 0.699 | 0.686 | 0.632 | 0.568 | 0.442 | 0.436 | 0.251 | 0.515 | 0.347 |
| ACSDCF算法 | 0.771 | 0.694 | 0.756 | 0.702 | 0.637 | 0.505 | 0.509 | 0.308 | 0.617 | 0.400 |
| AutoTrack算法 | 0.738 | 0.678 | 0.688 | 0.621 | 0.610 | 0.475 | 0.491 | 0.288 | 0.631 | 0.415 |
| ARCF算法 | 0.728 | 0.690 | 0.704 | 0.647 | 0.558 | 0.458 | 0.405 | 0.257 | 0.688 | 0.447 |
| SRDCF算法 | 0.697 | 0.643 | 0.650 | 0.588 | 0.608 | 0.468 | 0.501 | 0.301 | 0.478 | 0.310 |
Tab. 2 Comparison results of various algorithms on 4 standard datasets under occlusion property
| 算法 | OTB50数据集 | OTB100数据集 | UAV123数据集(Partail) | UAV123数据集(Full) | DTB70数据集 | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| DP | AUC | DP | AUC | DP | AUC | DP | AUC | DP | AUC | |
| 本文算法 | 0.798 | 0.752 | 0.797 | 0.760 | 0.645 | 0.506 | 0.518 | 0.321 | 0.706 | 0.476 |
| STRCF算法 | 0.798 | 0.736 | 0.763 | 0.689 | 0.587 | 0.468 | 0.488 | 0.289 | 0.599 | 0.425 |
| LADCF算法 | 0.794 | 0.743 | 0.761 | 0.707 | 0.619 | 0.489 | 0.481 | 0.285 | 0.663 | 0.434 |
| EMCF算法 | 0.750 | 0.675 | 0.666 | 0.602 | 0.614 | 0.488 | 0.506 | 0.301 | 0.648 | 0.449 |
| BACF算法 | 0.756 | 0.699 | 0.686 | 0.632 | 0.568 | 0.442 | 0.436 | 0.251 | 0.515 | 0.347 |
| ACSDCF算法 | 0.771 | 0.694 | 0.756 | 0.702 | 0.637 | 0.505 | 0.509 | 0.308 | 0.617 | 0.400 |
| AutoTrack算法 | 0.738 | 0.678 | 0.688 | 0.621 | 0.610 | 0.475 | 0.491 | 0.288 | 0.631 | 0.415 |
| ARCF算法 | 0.728 | 0.690 | 0.704 | 0.647 | 0.558 | 0.458 | 0.405 | 0.257 | 0.688 | 0.447 |
| SRDCF算法 | 0.697 | 0.643 | 0.650 | 0.588 | 0.608 | 0.468 | 0.501 | 0.301 | 0.478 | 0.310 |
| 算法 | IV | SV | OCC | DEF | MB | FM | IPR | OPR | OV | BC | LR |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 本文算法 | 0.813 | 0.797 | 0.771 | 0.816 | 0.835 | 0.778 | |||||
| LADCF算法 | 0.762 | 0.793 | 0.761 | 0.753 | 0.740 | 0.738 | 0.788 | 0.736 | 0.742 | 0.661 | |
| SRDCF算法 | 0.729 | 0.691 | 0.650 | 0.696 | 0.648 | 0.651 | 0.731 | 0.685 | 0.605 | 0.677 | 0.538 |
| BACF算法 | 0.754 | 0.748 | 0.686 | 0.752 | 0.667 | 0.748 | 0.755 | 0.746 | 0.684 | 0.727 | 0.669 |
| STRCF算法 | 0.780 | 0.788 | 0.765 | 0.752 | 0.789 | 0.797 | 0.717 | 0.798 | 0.672 | ||
| ARCF算法 | 0.715 | 0.757 | 0.704 | 0.702 | 0.725 | 0.715 | 0.715 | 0.723 | 0.693 | 0.663 | |
| AutoTrack算法 | 0.719 | 0.731 | 0.688 | 0.699 | 0.688 | 0.684 | 0.727 | 0.721 | 0.679 | 0.705 | 0.671 |
| ACSDCF算法 | 0.761 | 0.775 | 0.756 | 0.730 | 0.765 | 0.778 | 0.667 | 0.741 | 0.767 | ||
| EMCF算法 | 0.749 | 0.723 | 0.666 | 0.752 | 0.678 | 0.720 | 0.741 | 0.728 | 0.582 | 0.746 | 0.656 |
Tab. 3 DP scores of attributes in OTB100 for different comparison algorithms
| 算法 | IV | SV | OCC | DEF | MB | FM | IPR | OPR | OV | BC | LR |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 本文算法 | 0.813 | 0.797 | 0.771 | 0.816 | 0.835 | 0.778 | |||||
| LADCF算法 | 0.762 | 0.793 | 0.761 | 0.753 | 0.740 | 0.738 | 0.788 | 0.736 | 0.742 | 0.661 | |
| SRDCF算法 | 0.729 | 0.691 | 0.650 | 0.696 | 0.648 | 0.651 | 0.731 | 0.685 | 0.605 | 0.677 | 0.538 |
| BACF算法 | 0.754 | 0.748 | 0.686 | 0.752 | 0.667 | 0.748 | 0.755 | 0.746 | 0.684 | 0.727 | 0.669 |
| STRCF算法 | 0.780 | 0.788 | 0.765 | 0.752 | 0.789 | 0.797 | 0.717 | 0.798 | 0.672 | ||
| ARCF算法 | 0.715 | 0.757 | 0.704 | 0.702 | 0.725 | 0.715 | 0.715 | 0.723 | 0.693 | 0.663 | |
| AutoTrack算法 | 0.719 | 0.731 | 0.688 | 0.699 | 0.688 | 0.684 | 0.727 | 0.721 | 0.679 | 0.705 | 0.671 |
| ACSDCF算法 | 0.761 | 0.775 | 0.756 | 0.730 | 0.765 | 0.778 | 0.667 | 0.741 | 0.767 | ||
| EMCF算法 | 0.749 | 0.723 | 0.666 | 0.752 | 0.678 | 0.720 | 0.741 | 0.728 | 0.582 | 0.746 | 0.656 |
| 算法 | IV | SV | OCC | DEF | MB | FM | IPR | OPR | OV | BC | LR |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 本文算法 | 0.762 | 0.769 | 0.760 | 0.740 | 0.755 | 0.788 | 0.708 | ||||
| LADCF算法 | 0.728 | 0.737 | 0.684 | 0.722 | 0.711 | 0.708 | 0.729 | 0.670 | 0.700 | 0.569 | |
| SRDCF算法 | 0.678 | 0.603 | 0.588 | 0.644 | 0.626 | 0.634 | 0.655 | 0.622 | 0.528 | 0.632 | 0.384 |
| BACF算法 | 0.730 | 0.700 | 0.632 | 0.690 | 0.661 | 0.727 | 0.689 | 0.686 | 0.594 | 0.692 | 0.571 |
| STRCF算法 | 0.728 | 0.689 | 0.731 | 0.711 | 0.715 | 0.656 | 0.760 | 0.572 | |||
| ARCF算法 | 0.677 | 0.675 | 0.647 | 0.596 | 0.681 | 0.672 | 0.613 | 0.633 | 0.645 | 0.645 | 0.549 |
| AutoTrack算法 | 0.671 | 0.646 | 0.621 | 0.604 | 0.646 | 0.642 | 0.617 | 0.620 | 0.581 | 0.626 | 0.551 |
| ACSDCF算法 | 0.714 | 0.702 | 0.691 | 0.756 | 0.765 | 0.720 | 0.723 | 0.745 | |||
| EMCF算法 | 0.706 | 0.644 | 0.602 | 0.642 | 0.677 | 0.649 | 0.641 | 0.540 | 0.713 | 0.591 |
Tab. 4 AUC scores of attributes in OTB100 for different comparison algorithms
| 算法 | IV | SV | OCC | DEF | MB | FM | IPR | OPR | OV | BC | LR |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 本文算法 | 0.762 | 0.769 | 0.760 | 0.740 | 0.755 | 0.788 | 0.708 | ||||
| LADCF算法 | 0.728 | 0.737 | 0.684 | 0.722 | 0.711 | 0.708 | 0.729 | 0.670 | 0.700 | 0.569 | |
| SRDCF算法 | 0.678 | 0.603 | 0.588 | 0.644 | 0.626 | 0.634 | 0.655 | 0.622 | 0.528 | 0.632 | 0.384 |
| BACF算法 | 0.730 | 0.700 | 0.632 | 0.690 | 0.661 | 0.727 | 0.689 | 0.686 | 0.594 | 0.692 | 0.571 |
| STRCF算法 | 0.728 | 0.689 | 0.731 | 0.711 | 0.715 | 0.656 | 0.760 | 0.572 | |||
| ARCF算法 | 0.677 | 0.675 | 0.647 | 0.596 | 0.681 | 0.672 | 0.613 | 0.633 | 0.645 | 0.645 | 0.549 |
| AutoTrack算法 | 0.671 | 0.646 | 0.621 | 0.604 | 0.646 | 0.642 | 0.617 | 0.620 | 0.581 | 0.626 | 0.551 |
| ACSDCF算法 | 0.714 | 0.702 | 0.691 | 0.756 | 0.765 | 0.720 | 0.723 | 0.745 | |||
| EMCF算法 | 0.706 | 0.644 | 0.602 | 0.642 | 0.677 | 0.649 | 0.641 | 0.540 | 0.713 | 0.591 |
| 算法 | SV | ARC | LR | FM | FOC | POC | OV | BC | IV | VC | CM | SO |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 本文算法 | 0.610 | 0.564 | 0.518 | 0.645 | 0.592 | 0.517 | 0.637 | 0.694 | ||||
| LADCF算法 | 0.660 | 0.620 | 0.588 | 0.481 | 0.619 | 0.568 | 0.494 | 0.558 | 0.598 | 0.672 | ||
| SRDCF算法 | 0.639 | 0.587 | 0.579 | 0.524 | 0.501 | 0.608 | 0.576 | 0.600 | 0.593 | 0.627 | 0.678 | |
| BACF算法 | 0.621 | 0.579 | 0.526 | 0.525 | 0.436 | 0.568 | 0.543 | 0.513 | 0.531 | 0.590 | 0.642 | 0.680 |
| STRCF算法 | 0.643 | 0.586 | 0.589 | 0.554 | 0.488 | 0.587 | 0.570 | 0.502 | 0.538 | 0.581 | 0.658 | 0.648 |
| ARCF算法 | 0.617 | 0.579 | 0.540 | 0.505 | 0.405 | 0.558 | 0.494 | 0.526 | 0.559 | 0.573 | 0.618 | 0.662 |
| AutoTrack算法 | 0.650 | 0.614 | 0.574 | 0.491 | 0.610 | 0.556 | 0.520 | 0.573 | 0.595 | 0.693 | ||
| ACSDCF算法 | 0.686 | 0.650 | 0.655 | 0.600 | 0.630 | 0.638 | 0.657 | 0.694 | 0.704 | |||
| EMCF算法 | 0.662 | 0.610 | 0.599 | 0.562 | 0.506 | 0.614 | 0.570 | 0.493 | 0.536 | 0.589 | 0.672 | 0.716 |
Tab. 5 DP scores of attributes in UAV123 for different comparison algorithms
| 算法 | SV | ARC | LR | FM | FOC | POC | OV | BC | IV | VC | CM | SO |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 本文算法 | 0.610 | 0.564 | 0.518 | 0.645 | 0.592 | 0.517 | 0.637 | 0.694 | ||||
| LADCF算法 | 0.660 | 0.620 | 0.588 | 0.481 | 0.619 | 0.568 | 0.494 | 0.558 | 0.598 | 0.672 | ||
| SRDCF算法 | 0.639 | 0.587 | 0.579 | 0.524 | 0.501 | 0.608 | 0.576 | 0.600 | 0.593 | 0.627 | 0.678 | |
| BACF算法 | 0.621 | 0.579 | 0.526 | 0.525 | 0.436 | 0.568 | 0.543 | 0.513 | 0.531 | 0.590 | 0.642 | 0.680 |
| STRCF算法 | 0.643 | 0.586 | 0.589 | 0.554 | 0.488 | 0.587 | 0.570 | 0.502 | 0.538 | 0.581 | 0.658 | 0.648 |
| ARCF算法 | 0.617 | 0.579 | 0.540 | 0.505 | 0.405 | 0.558 | 0.494 | 0.526 | 0.559 | 0.573 | 0.618 | 0.662 |
| AutoTrack算法 | 0.650 | 0.614 | 0.574 | 0.491 | 0.610 | 0.556 | 0.520 | 0.573 | 0.595 | 0.693 | ||
| ACSDCF算法 | 0.686 | 0.650 | 0.655 | 0.600 | 0.630 | 0.638 | 0.657 | 0.694 | 0.704 | |||
| EMCF算法 | 0.662 | 0.610 | 0.599 | 0.562 | 0.506 | 0.614 | 0.570 | 0.493 | 0.536 | 0.589 | 0.672 | 0.716 |
| 算法 | SV | ARC | LR | FM | FOC | POC | OV | BC | IV | VC | CM | SO |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 本文算法 | 0.558 | 0.488 | 0.415 | 0.321 | 0.509 | 0.410 | 0.477 | 0.503 | 0.526 | 0.547 | ||
| LADCF算法 | 0.526 | 0.438 | 0.384 | 0.382 | 0.285 | 0.489 | 0.467 | 0.376 | 0.399 | 0.443 | 0.556 | |
| SRDCF算法 | 0.510 | 0.431 | 0.359 | 0.366 | 0.301 | 0.468 | 0.465 | 0.457 | 0.441 | 0.512 | 0.532 | |
| BACF算法 | 0.509 | 0.442 | 0.335 | 0.387 | 0.251 | 0.442 | 0.462 | 0.380 | 0.411 | 0.454 | 0.538 | 0.546 |
| STRCF算法 | 0.516 | 0.418 | 0.388 | 0.359 | 0.289 | 0.468 | 0.470 | 0.382 | 0.385 | 0.426 | 0.545 | 0.550 |
| ARCF算法 | 0.512 | 0.440 | 0.377 | 0.349 | 0.257 | 0.458 | 0.441 | 0.418 | 0.457 | 0.429 | 0.518 | 0.537 |
| AutoTrack算法 | 0.515 | 0.440 | 0.386 | 0.380 | 0.288 | 0.475 | 0.455 | 0.381 | 0.408 | 0.447 | 0.553 | 0.561 |
| ACSDCF算法 | 0.417 | 0.506 | 0.451 | 0.578 | 0.580 | |||||||
| EMCF算法 | 0.529 | 0.434 | 0.392 | 0.383 | 0.301 | 0.488 | 0.469 | 0.377 | 0.400 | 0.442 | 0.591 |
Tab. 6 AUC scores of attributes in UAV123 for different comparison algorithms
| 算法 | SV | ARC | LR | FM | FOC | POC | OV | BC | IV | VC | CM | SO |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 本文算法 | 0.558 | 0.488 | 0.415 | 0.321 | 0.509 | 0.410 | 0.477 | 0.503 | 0.526 | 0.547 | ||
| LADCF算法 | 0.526 | 0.438 | 0.384 | 0.382 | 0.285 | 0.489 | 0.467 | 0.376 | 0.399 | 0.443 | 0.556 | |
| SRDCF算法 | 0.510 | 0.431 | 0.359 | 0.366 | 0.301 | 0.468 | 0.465 | 0.457 | 0.441 | 0.512 | 0.532 | |
| BACF算法 | 0.509 | 0.442 | 0.335 | 0.387 | 0.251 | 0.442 | 0.462 | 0.380 | 0.411 | 0.454 | 0.538 | 0.546 |
| STRCF算法 | 0.516 | 0.418 | 0.388 | 0.359 | 0.289 | 0.468 | 0.470 | 0.382 | 0.385 | 0.426 | 0.545 | 0.550 |
| ARCF算法 | 0.512 | 0.440 | 0.377 | 0.349 | 0.257 | 0.458 | 0.441 | 0.418 | 0.457 | 0.429 | 0.518 | 0.537 |
| AutoTrack算法 | 0.515 | 0.440 | 0.386 | 0.380 | 0.288 | 0.475 | 0.455 | 0.381 | 0.408 | 0.447 | 0.553 | 0.561 |
| ACSDCF算法 | 0.417 | 0.506 | 0.451 | 0.578 | 0.580 | |||||||
| EMCF算法 | 0.529 | 0.434 | 0.392 | 0.383 | 0.301 | 0.488 | 0.469 | 0.377 | 0.400 | 0.442 | 0.591 |
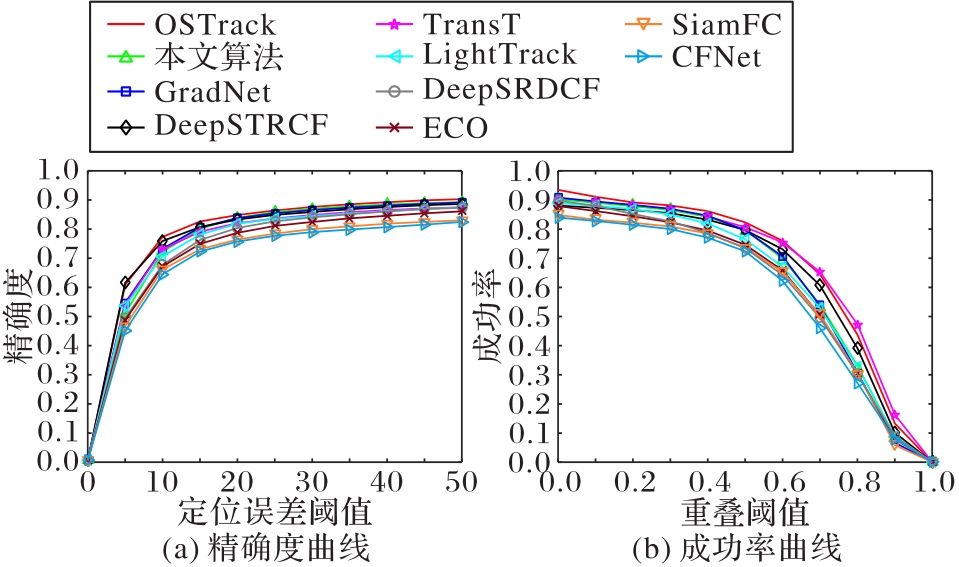
Fig. 10 Performance curves of proposed algorithm and deep learning tracking algorithms on OTB100 dataset
| OSTrack | 本文算法 | GradNet | DeepSTRCF | TransT | |||||
|---|---|---|---|---|---|---|---|---|---|
| DP | AUC | DP | AUC | DP | AUC | DP | AUC | DP | AUC |
| 0.848 | 0.823 | 0.838 | 0.789 | 0.837 | 0.796 | 0.833 | 0.797 | 0.820 | 0.807 |
| LightTrack | DeepSRDCF | ECO | SiamFC | CFNet | |||||
| DP | AUC | DP | AUC | DP | AUC | DP | AUC | DP | AUC |
| 0.818 | 0.765 | 0.804 | 0.735 | 0.787 | 0.746 | 0.764 | 0.736 | 0.757 | 0.724 |
Tab. 7 Quantitative comparison results between proposed algorithm and deep learning tracking algorithms on OTB100 dataset
| OSTrack | 本文算法 | GradNet | DeepSTRCF | TransT | |||||
|---|---|---|---|---|---|---|---|---|---|
| DP | AUC | DP | AUC | DP | AUC | DP | AUC | DP | AUC |
| 0.848 | 0.823 | 0.838 | 0.789 | 0.837 | 0.796 | 0.833 | 0.797 | 0.820 | 0.807 |
| LightTrack | DeepSRDCF | ECO | SiamFC | CFNet | |||||
| DP | AUC | DP | AUC | DP | AUC | DP | AUC | DP | AUC |
| 0.818 | 0.765 | 0.804 | 0.735 | 0.787 | 0.746 | 0.764 | 0.736 | 0.757 | 0.724 |

Fig. 11 Comparison of tracking results of various algorithms on OTB100 dataset

Fig. 12 Comparison of tracking results of various algorithms on UAV123 dataset
| 算法 | FPS | 算法 | FPS |
|---|---|---|---|
| 本文算法 | 26.20 | ARCF算法 | 37.30 |
| LADCF算法 | 24.60 | AutoTrack算法 | 25.20 |
| SRDCF算法 | 13.13 | ACSDCF算法 | 31.79 |
| BACF算法 | 51.48 | EMCF算法 | 66.89 |
| STRCF算法 | 26.18 |
Tab. 8 Comparison of average tracking speed among various algorithms on OTB100 dataset
| 算法 | FPS | 算法 | FPS |
|---|---|---|---|
| 本文算法 | 26.20 | ARCF算法 | 37.30 |
| LADCF算法 | 24.60 | AutoTrack算法 | 25.20 |
| SRDCF算法 | 13.13 | ACSDCF算法 | 31.79 |
| BACF算法 | 51.48 | EMCF算法 | 66.89 |
| STRCF算法 | 26.18 |
| 算法 | NTCT | NFU | DP | AUC |
|---|---|---|---|---|
| 算法1 | × | × | 0.814 | 0.760 |
| 算法2 | √ | × | 0.825 | 0.767 |
| 算法3 | × | √ | 0.820 | 0.782 |
| 算法4 | √ | √ | 0.838 | 0.798 |
Tab. 9 Results of ablation experiments
| 算法 | NTCT | NFU | DP | AUC |
|---|---|---|---|---|
| 算法1 | × | × | 0.814 | 0.760 |
| 算法2 | √ | × | 0.825 | 0.767 |
| 算法3 | × | √ | 0.820 | 0.782 |
| 算法4 | √ | √ | 0.838 | 0.798 |
| 1 | 韩瑞泽,冯伟,郭青,等.视频单目标跟踪研究进展综述[J].计算机学报, 2022,45(9):1877-1907. |
| HAN R Z, FENG W, GUO Q, et al. Single object tracking research: a survey[J]. Chinese Journal of Computers, 2022, 45(9): 1877-1907. | |
| 2 | 才华,寇婷婷,杨依宁,等.基于轨迹优化的三维车辆多目标跟踪[J/OL].吉林大学学报(工学版):1-9(2023-05-09)[2023-05-28].. |
| CAI H, KOU T T, YANG Y N,et al.Three-dimensional vehicle multi-target tracking based on trajectory optimization[J/OL]. Journal of Jilin University (Engineering and Technology Edition):1-9.(2023-05-09)[2023-05-28].. | |
| 3 | 张楠,史建华,亿吉,等.基于加权质心定位的井下移动目标实时跟踪方法[J].吉林大学学报(工学版),2023,53(5):1458-1464. |
| ZHANG N, SHI J H, YI J, et al. Real-time tracking method of underground moving target based on weighted centroid positioning[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(5): 1458-1464. | |
| 4 | 侯艳丽,王鑫涛,魏义仑,等.基于IMPSiamCAR孪生网络无人机目标跟踪算法[J].计算机应用研究,2023,40(1):315-320. |
| HOU Y L, WANG X T, WEI Y L, et al. Tracking algorithm of unmanned aerial vehicle targets based on IMPSiamCAR for siamese network[J]. Application Research of Computers, 2023, 40(1): 315-320. | |
| 5 | 刘艺,李蒙蒙,郑奇斌,等.视频目标跟踪算法综述[J].计算机科学与探索,2022,16(7):1504-1515. |
| LIU Y, LI M M, ZHENG Q B, et al. Survey on video object tracking algorithms[J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(7): 1504-1515. | |
| 6 | 黄月平,李小锋,杨小冈,等.基于相关滤波的视觉目标跟踪算法新进展[J].系统工程与电子技术,2021,43(8):2051-2065. |
| HUANG Y P, LI X F, YANG X G, et al. Advances in visual object tracking algorithm based on correlation filter[J]. Systems Engineering and Electronics, 2021, 43(8): 2051-2065. | |
| 7 | BOLME D S, BEVERIDGE J R, DRAPER B A, et al. Visual object tracking using adaptive correlation filters [C]// Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Washington, DC: IEEE Computer Society,2010: 2544-2550. |
| 8 | DANELLJAN M, HÄGER G, KHAN F S, et al. Accurate scale estimation for robust visual tracking [C]// Proceedings of the 2014 British Machine Vision Conference. Nottingham: British Machine Vision Association, 2014: 384-393. |
| 9 | HENRIQUES J F, CASEIRO R, MARTINS P, et al. High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(3): 583-596. |
| 10 | DALAL N, TRIGGS B. Histograms of oriented gradients for human detection [C]// Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Washington, DC: IEEE Computer Society, 2005: 886-893. |
| 11 | DANELLJAN M, HÄGER G, KHAN F S, et al. Learning spatially regularized correlation filters for visual tracking [C]// Proceedings of the 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2015: 4310-4318. |
| 12 | GALOOGAHI H K, FAGG A, LUCEY S. Learning background-aware correlation filters for visual tracking [C]∥ Proceedings of the 2017 International Conference on Computer Vision. Piscataway: IEEE, 2017: 1144-1152. |
| 13 | LI F, TIAN C, ZUO W, et al. Learning spatial-temporal regularized correlation filters for visual tracking [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 4904-4913. |
| 14 | HUANG Z, FU C, LI Y, et al. Learning aberrance repressed correlation filters for real-time UAV tracking [C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 2891-2900. |
| 15 | XU T, FENG Z-H, WU X-J, et al. Learning adaptive discriminative correlation filters via temporal consistency preserving spatial feature selection for robust visual object tracking[J]. IEEE Transactions on Image Processing, 2019, 28(11): 5596-5609. |
| 16 | LI Y, FU C, DING F, et al. AutoTrack: towards high-performance visual tracking for UAV with automatic spatio-temporal regularization [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 11920-11929. |
| 17 | XU T, FENG Z, WU X-J, et al. Adaptive channel selection for robust visual object tracking with discriminative correlation filters[J]. International Journal of Computer Vision, 2021, 129: 1359-1375. |
| 18 | ZHANG F, MA S, ZHANG Y, et al. Perceiving temporal environment for correlation filters in real-time UAV tracking[J]. IEEE Signal Processing Letters, 2022, 29: 6-10. |
| 19 | 孙子文,钱立志,杨传栋,等.基于Transformer的视觉目标跟踪方法综述[J].计算机应用, 2024, 44(5): 1644-1654. |
| SUN Z W, QIAN L Z, YANG C D, et al. Survey of visual object tracking methods based on Transformer[J]. Journal of Computer Applications, 2024, 44(5): 1644-1654. | |
| 20 | WANG G, LUO C, SUN X, et al. Tracking by instance detection: a meta-learning approach [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 6287-6296. |
| 21 | 徐健,张林耀,袁皓,等.ATOM多注意力融合工件跟踪方法研究[J].光电子·激光,2022,33(10):1047-1054. |
| XU J, ZHANG L Y, YUAN H, et al. Research on ATOM multi-attention fusion workpiece tracking method[J]. Journal of Optoelectronics·Laser, 2022, 33(10): 1047-1054. | |
| 22 | BERTINETTO L, VALMADRE J, HENRIQUES J F, et al. Fully convolutional siamese networks for object tracking [C]// Proceedings of the 14th European Conference on Computer Vision. Cham: Springer, 2016: 850-865. |
| 23 | VALMADRE J, BERTINETTO L, HENRIQUES J, et al. End-to-end representation learning for correlation filter based tracking [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 5000-5008. |
| 24 | CHEN X, YAN B, ZHU J, et al. Transformer tracking [C]// Proceedings of the 2021 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 8122-8131. |
| 25 | 张天路,张强.基于深度学习的RGB-T目标跟踪技术综述[J].模式识别与人工智能,2023,36(4):327-353. |
| ZHANG T L, ZHANG Q. A survey of RGB-T object tracking technologies based on deep learning[J]. Pattern Recognition and Artificial Intelligence, 2023, 36(4): 327-353. | |
| 26 | 张长弓,杨海涛,王晋宇,等.基于深度学习的视觉单目标跟踪综述[J].计算机应用研究,2021,38(10):2888-2895. |
| ZHANG C G, YANG H T, WANG J Y, et al. Survey on visual single object tracking based on deep learning[J]. Application Research of Computers, 2021, 38(10): 2888-2895. | |
| 27 | STEVENS S S. To honor Fechner and repeal his law: a power function, not a log function, describes the operating characteristic of a sensory system[J]. Science, 1961, 133(3446): 80-86. |
| 28 | 韦联福.再谈拉格朗日函数非唯一性的物理意义:广义规范变换和正则变换的等价性证明[J].物理与工程,2021,31(2):31-35,40. |
| WEI L F. Remarks on the non-uniqueness of Lagrange function: an equivalence proof between the gauge and canonical transformations[J]. Physics and Engineering, 2021, 31(2): 31-35, 40. | |
| 29 | 姜文涛,刘晓璇,涂潮,等.自适应空间异常的目标跟踪[J].电子与信息学报,2022,44(2):523-533. |
| JIANG W T, LIU X X, TU C, et al. Adaptive spatial and anomaly target tracking[J]. Journal of Electronics & Information Technology, 2022, 44(2): 523-533. | |
| 30 | WU Y, LIM J, YANG M-H. Online object tracking: a benchmark [C]// Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2013: 2411-2418. |
| 31 | WU Y, LIM J, YANG M-H. Object tracking benchmark[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1834-1848. |
| 32 | MUELLER M, SMITH N, GHANEM B. A benchmark and simulator for UAV tracking [C]// Proceedings of the 14th IEEE European Conference on Computer Vision. Cham: Springer, 2016: 445-461. |
| 33 | LI S, D-Y YEUNG. Visual object tracking for unmanned aerial vehicles: a benchmark and new motion models [J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2017, 31(1): 4140-4146. |
| 34 | DANELLJAN M, HAGER G, KHAN F S, et al. Convolutional features for correlation filter based visual tracking [C]// Proceedings of the 2015 IEEE International Conference on Computer Vision Workshop. Piscataway: IEEE, 2015:621-629. |
| 35 | DANELLJAN M, BHAT G, KHAN F S, et al. ECO: efficient convolution operators for tracking [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 6931-6939. |
| 36 | LI P, CHEN B, OUYANG W, et al. GradNet: gradient-guided network for visual object tracking [C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 6161-6170. |
| 37 | YAN B, PENG H, WU K, et al. LightTrack: finding lightweight neural networks for object tracking via one-shot architecture search [C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 15175-15184. |
| 38 | YE B, CHANG H, MA B, et al. Joint feature learning and relation modeling for tracking: a one-stream framework [C]// Proceedings of the 17th European Conference on Computer Vision. Cham: Springer, 2022: 341-357. |
| [1] | Cunyi LIAO, Yi ZHENG, Weijin LIU, Huan YU, Shouyin LIU. Decoupling-fusing algorithm for multiple tasks with autonomous driving environment perception [J]. Journal of Computer Applications, 2024, 44(2): 424-431. |
| [2] | Chenhui CUI, Suzhen LIN, Dawei LI, Xiaofei LU, Jie WU. Infrared dim small target tracking method based on Siamese network and Transformer [J]. Journal of Computer Applications, 2024, 44(2): 563-571. |
| [3] | Xin TANG, Bo PENG, Fei TENG. Infrared small target tracking method based on state information [J]. Journal of Computer Applications, 2023, 43(6): 1938-1942. |
| [4] | Mengting WANG, Wenzhong YANG, Yongzhi WU. Survey of single target tracking algorithms based on Siamese network [J]. Journal of Computer Applications, 2023, 43(3): 661-673. |
| [5] | JI Zhangjian, REN Xingwang. Object tracking algorithm of fully-convolutional Siamese networks with rotation and scale estimation [J]. Journal of Computer Applications, 2021, 41(9): 2705-2711. |
| [6] | WANG Ning, SONG Huihui, ZHANG Kaihua. Accurate object tracking algorithm based on distance weighting overlap prediction and ellipse fitting optimization [J]. Journal of Computer Applications, 2021, 41(4): 1100-1105. |
| [7] | ZHANG Jie, CHANG Tianqing, DAI Wenjun, GUO Libin, ZHANG Lei. Object tracking algorithm based on correlation filtering and color probability model [J]. Journal of Computer Applications, 2020, 40(6): 1774-1782. |
| [8] | HE Xiangyu, LI Jing, YANG Shuqiang, XIA Yujie. Extended target tracking algorithm based on ET-PHD filter and variational Bayesian approximation [J]. Journal of Computer Applications, 2020, 40(12): 3701-3706. |
| [9] | YANG Bo, LIN Suzhen, LU Xiaofei, LI Dawei, QIN Pinle, ZUO Jianhong. Multiple aerial infrared target tracking method based on multi-feature fusion and hierarchical data association [J]. Journal of Computer Applications, 2020, 40(10): 3075-3080. |
| [10] | HE Xiangyu, YU Bin, XIA Yujie. Solution method to anomalous smoothing problem in particle probability hypothesis density smoother [J]. Journal of Computer Applications, 2020, 40(1): 299-303. |
| [11] | YU Haofang, SUN Lifan, FU Zhumu. Multi-extended target tracking algorithm based on improved K-means++ clustering [J]. Journal of Computer Applications, 2020, 40(1): 271-277. |
| [12] | HAN Yulan, HAN Chongzhao. Multiple extended target tracking algorithm for nonliear system [J]. Journal of Computer Applications, 2019, 39(5): 1318-1324. |
| [13] | XIONG Xiaoxuan, WANG Wenwei. Kernelized correlation filtering method based on fast discriminative scale estimation [J]. Journal of Computer Applications, 2019, 39(2): 546-550. |
| [14] | YE Yuanzheng, LI Xiaoxia, LI Minze. Rapid stable detection of human faces in image sequence based on MS-KCF model [J]. Journal of Computer Applications, 2018, 38(8): 2192-2197. |
| [15] | DU Qiliang, LI Haozheng, TIAN Lianfang. Video monitoring method of escalator entrance area based on Adaboost and codebook model [J]. Journal of Computer Applications, 2017, 37(9): 2610-2616. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||