


Journal of Computer Applications ›› 2024, Vol. 44 ›› Issue (11): 3556-3564.DOI: 10.11772/j.issn.1001-9081.2023111661
• Multimedia computing and computer simulation • Previous Articles Next Articles
Lihua HU1( ), Xiaoping LI1, Jianhua HU2, Sulan ZHANG1
), Xiaoping LI1, Jianhua HU2, Sulan ZHANG1
Received:2023-12-04
Revised:2024-05-25
Accepted:2024-05-30
Online:2024-07-25
Published:2024-11-10
Contact:
Lihua HU
About author:LI Xiaoping, born in 1998, M. S. candidate. Her research interests include computer vision.Supported by:
胡立华1(), 李小平1, 胡建华2, 张素兰1
通讯作者:
胡立华
作者简介:李小平(1998—),女,山东青岛人,硕士研究生,主要研究方向:计算机视觉基金资助:CLC Number:
Lihua HU, Xiaoping LI, Jianhua HU, Sulan ZHANG. Multi-view stereo method based on quadtree prior assistance[J]. Journal of Computer Applications, 2024, 44(11): 3556-3564.
胡立华, 李小平, 胡建华, 张素兰. 基于四叉树先验辅助的多视图立体方法[J]. 《计算机应用》唯一官方网站, 2024, 44(11): 3556-3564.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2023111661
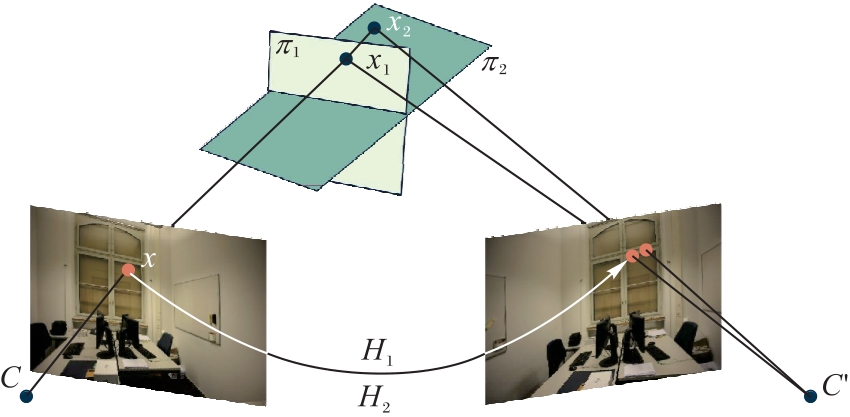
Fig. 1 Pixel matching process between reference image and source image

Fig. 2 Basic process of ACMH
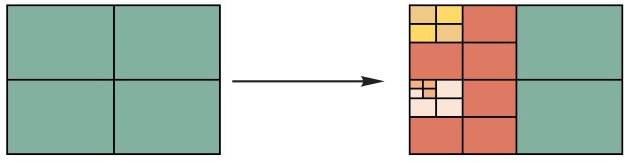
Fig. 3 Quadtree segmentation image

Fig. 4 Framework of the proposed method
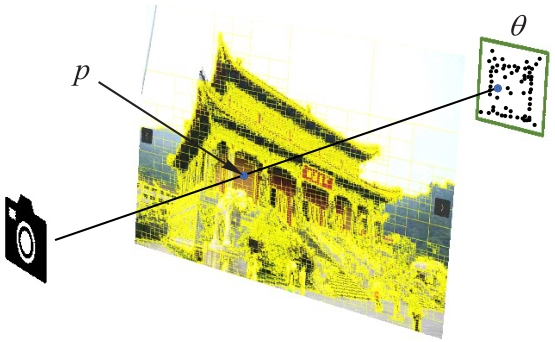
Fig. 5 Priori plane

Fig. 6 Examples of segmentation of ancient architecture dataset

Fig. 7 Probabilistic graphical model reasoning
| 参数 | 值 | 意义 |
|---|---|---|
| x | 5 | 窗口大小 |
| β | 0.12 | 先验平面系数 |
| α | 0.08 | 像素局部纹理度系数 |
| ε | 0.1 | 与先验平面相关的代价项权重系数 |
| ρ | 0.18 | 多视图匹配代价系数 |
| γ | 0.15 | 可靠点代价阈值 |
| thr | 0.2 | 平面置信度阈值 |
Tab. 1 Parameter setting of proposed method
| 参数 | 值 | 意义 |
|---|---|---|
| x | 5 | 窗口大小 |
| β | 0.12 | 先验平面系数 |
| α | 0.08 | 像素局部纹理度系数 |
| ε | 0.1 | 与先验平面相关的代价项权重系数 |
| ρ | 0.18 | 多视图匹配代价系数 |
| γ | 0.15 | 可靠点代价阈值 |
| thr | 0.2 | 平面置信度阈值 |

Fig. 8 Reconstructed point cloud visualization of ancient architecture
| 方法 | 所有场景 | 室内 | 室外 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| F1分数 | 准确性 | 完整性 | F1分数 | 准确性 | 完整性 | F1分数 | 准确性 | 完整性 | |
| 文献[ | 85.76 | 86.17 | 85.71 | 85.29 | 85.54 | 85.46 | 87.17 | 88.05 | 86.46 |
| 文献[ | 91.91 | 81.49 | 91.87 | 80.67 | 83.93 | ||||
| 文献[ | — | — | — | 82.59 | 77.39 | 79.50 | 82.58 | 87.64 | 85.03 |
| 文献[ | 81.51 | 90.54 | 75.58 | 80.57 | 90.60 | 74.23 | 84.36 | 90.35 | 79.62 |
| ACMH | 75.89 | 89.34 | 68.62 | 73.93 | 91.14 | 64.81 | 81.77 | 83.96 | 80.03 |
| 文献[ | 81.27 | 91.47 | 75.82 | 82.08 | 74.58 | 84.50 | 90.82 | 79.56 | |
| 文献[ | 81.84 | 80.24 | 80.70 | 78.74 | 83.43 | 85.27 | 84.73 | 86.44 | |
| 文献[ | 79.77 | 81.98 | 78.54 | 78.33 | 82.00 | 75.92 | 84.09 | 81.93 | 86.41 |
| 本文方法 | 87.18 | 83.87 | 86.91 | 91.36 | 88.00 | 92.08 | |||
Tab. 2 Comparisons of quantitative assessment on ETH3D high-resolution test dataset with default error threshold of 2 cm
| 方法 | 所有场景 | 室内 | 室外 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| F1分数 | 准确性 | 完整性 | F1分数 | 准确性 | 完整性 | F1分数 | 准确性 | 完整性 | |
| 文献[ | 85.76 | 86.17 | 85.71 | 85.29 | 85.54 | 85.46 | 87.17 | 88.05 | 86.46 |
| 文献[ | 91.91 | 81.49 | 91.87 | 80.67 | 83.93 | ||||
| 文献[ | — | — | — | 82.59 | 77.39 | 79.50 | 82.58 | 87.64 | 85.03 |
| 文献[ | 81.51 | 90.54 | 75.58 | 80.57 | 90.60 | 74.23 | 84.36 | 90.35 | 79.62 |
| ACMH | 75.89 | 89.34 | 68.62 | 73.93 | 91.14 | 64.81 | 81.77 | 83.96 | 80.03 |
| 文献[ | 81.27 | 91.47 | 75.82 | 82.08 | 74.58 | 84.50 | 90.82 | 79.56 | |
| 文献[ | 81.84 | 80.24 | 80.70 | 78.74 | 83.43 | 85.27 | 84.73 | 86.44 | |
| 文献[ | 79.77 | 81.98 | 78.54 | 78.33 | 82.00 | 75.92 | 84.09 | 81.93 | 86.41 |
| 本文方法 | 87.18 | 83.87 | 86.91 | 91.36 | 88.00 | 92.08 | |||

Fig. 9 F1 comparison on ETH3D high-resolution training dataset with different error thresholds

Fig. 10 Partial visualization assessment on ETH3D high-resolution dataset
| 方法 | 平均 F1分数 | Intermediate集合 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Family | Francis | Horse | Lighthouse | M60 | Panther | Playground | Train | ||
| 文献[ | 42.14 | 50.41 | 22.25 | 25.63 | 56.43 | 44.83 | 46.97 | 48.53 | 42.04 |
| 文献[ | 59.38 | 55.94 | 59.47 | 59.51 | 58.20 | ||||
| 文献[ | 70.30 | 54.06 | 54.11 | 61.65 | 54.16 | 57.60 | 58.12 | ||
| ACMH | 54.82 | 69.99 | 49.45 | 45.12 | 59.04 | 52.64 | 52.37 | 58.34 | 51.61 |
| 文献[ | 55.11 | — | — | — | — | — | — | — | — |
| 文献[ | 55.88 | 70.99 | 49.60 | 40.34 | 63.44 | 57.79 | 56.59 | 49.40 | |
| 本文方法 | 58.00 | 72.08 | 58.45 | 45.92 | 64.16 | 57.84 | 49.09 | ||
Tab. 3 Quantitative results of F1 score on Tanks and Temples dataset
| 方法 | 平均 F1分数 | Intermediate集合 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Family | Francis | Horse | Lighthouse | M60 | Panther | Playground | Train | ||
| 文献[ | 42.14 | 50.41 | 22.25 | 25.63 | 56.43 | 44.83 | 46.97 | 48.53 | 42.04 |
| 文献[ | 59.38 | 55.94 | 59.47 | 59.51 | 58.20 | ||||
| 文献[ | 70.30 | 54.06 | 54.11 | 61.65 | 54.16 | 57.60 | 58.12 | ||
| ACMH | 54.82 | 69.99 | 49.45 | 45.12 | 59.04 | 52.64 | 52.37 | 58.34 | 51.61 |
| 文献[ | 55.11 | — | — | — | — | — | — | — | — |
| 文献[ | 55.88 | 70.99 | 49.60 | 40.34 | 63.44 | 57.79 | 56.59 | 49.40 | |
| 本文方法 | 58.00 | 72.08 | 58.45 | 45.92 | 64.16 | 57.84 | 49.09 | ||
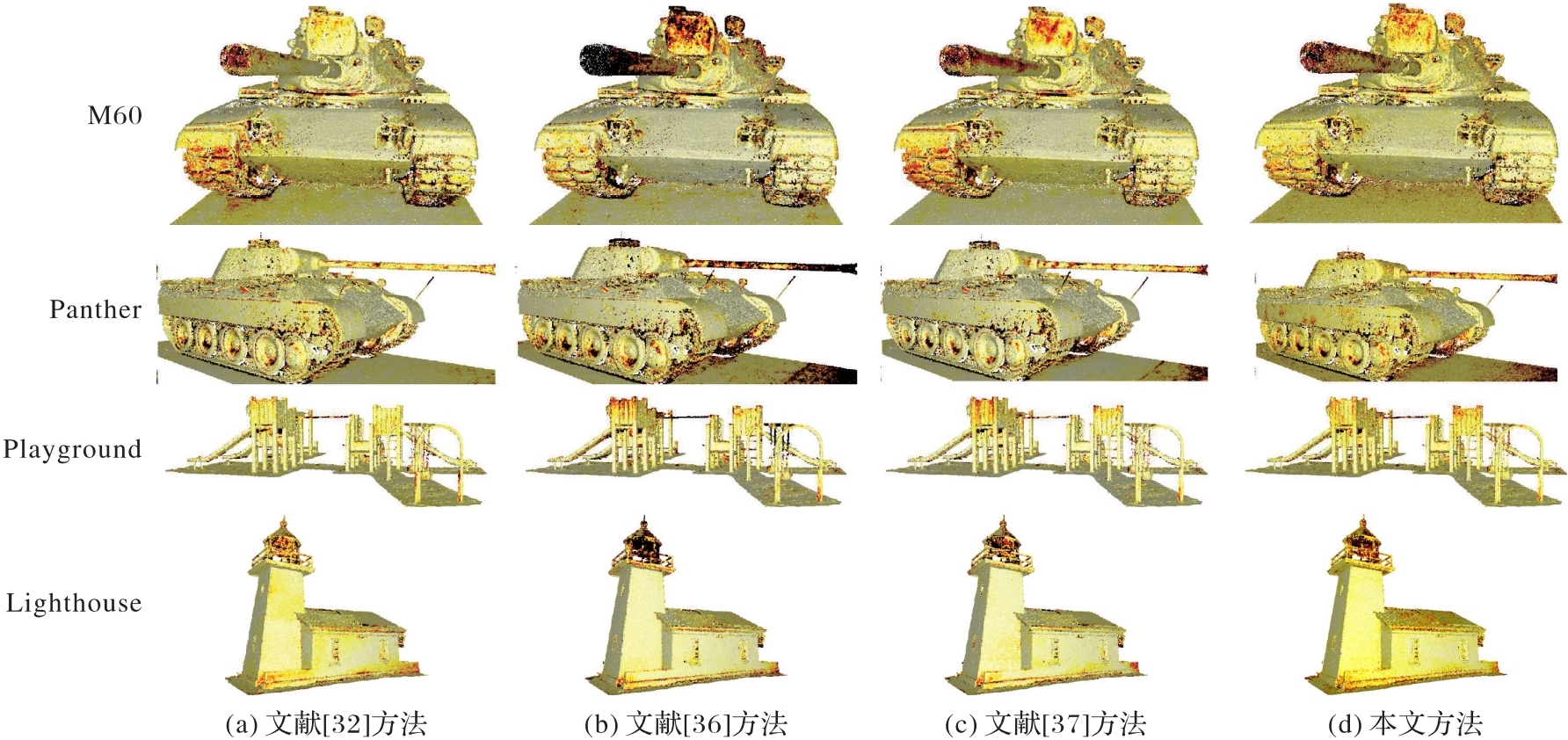
Fig. 11 Partial visualization assessment on Tanks and Temples dataset
| 方法 | F1分数 | 完整性 | 准确性 |
|---|---|---|---|
| 本文方法/EE | 81.51 | 75.58 | |
| 本文方法/Q | 89.47 | ||
| 本文方法 | 87.18 | 91.54 | 83.87 |
Tab. 4 Ablation experiment results
| 方法 | F1分数 | 完整性 | 准确性 |
|---|---|---|---|
| 本文方法/EE | 81.51 | 75.58 | |
| 本文方法/Q | 89.47 | ||
| 本文方法 | 87.18 | 91.54 | 83.87 |
| 数据集 | 场景 | 图像数 | 运行时间/s | |
|---|---|---|---|---|
| 基线方法 | 本文方法 | |||
| Strecha | fountain | 11 | 199.51 | 231.72 |
| entry | 10 | 173.02 | 209.16 | |
| ETH3D | electro | 45 | 488.58 | 551.19 |
| relief_2 | 31 | 648.75 | 739.72 | |
Tab. 5 Comparison of reconstruction running time
| 数据集 | 场景 | 图像数 | 运行时间/s | |
|---|---|---|---|---|
| 基线方法 | 本文方法 | |||
| Strecha | fountain | 11 | 199.51 | 231.72 |
| entry | 10 | 173.02 | 209.16 | |
| ETH3D | electro | 45 | 488.58 | 551.19 |
| relief_2 | 31 | 648.75 | 739.72 | |
| 1 | XIAO X, XU C, WANG J, et al. Enhanced 3-D modeling for landmark image classification[J]. IEEE Transactions on Multimedia, 2012, 14(4): 1246-1258. |
| 2 | MAIER-HEIN L, MOUNTNEY P, BARTOLI A, et al. Optical techniques for 3D surface reconstruction in computer-assisted laparoscopic surgery[J]. Medical Image Analysis, 2013, 17(8): 974-996. |
| 3 | NEWCOMBE R A, LOVEGROVE S J, DAVISON A J. DTAM: dense tracking and mapping in real-time[C]// Proceedings of the 2011 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2011: 2320-2327. |
| 4 | WANG W, GAO W. Efficient multi-plane extraction from massive 3D points for modeling large-scale urban scenes[J]. The Visual Computer, 2019, 35(5): 625-638. |
| 5 | KOSTRIKOV I, HORBERT E, LEIBE B. Probabilistic labeling cost for high-accuracy multi-view reconstruction[C]// Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2014: 1534-1541. |
| 6 | ESTEBAN C H, SCHMITT F. Silhouette and stereo fusion for 3D object modeling[C]// Proceedings of the 4th International Conference on 3-D Digital Imaging and Modeling. Piscataway: IEEE, 2003: 46-53. |
| 7 | FURUKAWA Y, PONCE J. Accurate, dense, and robust multiview stereopsis[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(8): 1362-1376. |
| 8 | WU P, LIU Y, YE M, et al. Fast and adaptive 3D reconstruction with extensively high completeness[J]. IEEE Transactions on Multimedia, 2017, 19(2): 266-278. |
| 9 | SHEN S. Accurate multiple view 3D reconstruction using patch-based stereo for large-scale scenes[J]. IEEE Transactions on Image Processing, 2013, 22(5): 1901-1914. |
| 10 | BLEYER M, RHEMANN C, ROTHER C. PatchMatch Stereo — stereo matching with slanted support windows[C]// Proceedings of the 2011 British Machine Vision Conference. Durham: BMVA Press, 2011: No.14. |
| 11 | XU Q, TAO W. Multi-scale geometric consistency guided multi-view stereo[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 5478-5487. |
| 12 | FISCHLER M A, BOLLES R C. Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography[J]. Communications of the ACM, 1981, 24(6): 381-395. |
| 13 | BARNES C, SHECHTMAN E, FINKELSTEIN A, et al. PatchMatch: a randomized correspondence algorithm for structural image editing[J]. ACM Transactions on Graphics, 2009, 28(3): No.24. |
| 14 | ZHENG E, DUNN E, JOJIC V, et al. PatchMatch based joint view selection and depthmap estimation[C]// Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2014: 1510-1517. |
| 15 | NEAL R M, HINTON G E. A view of the EM algorithm that justifies incremental, sparse, and other variants[M]// JORDAN M I. Learning in Graphical Models, ASID 89. Dordrecht: Springer, 1998: 355-368. |
| 16 | GALLIANI S, LASINGER K, SCHINDLER K. Massively parallel multiview stereopsis by surface normal diffusion[C]// Proceedings of the 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2015: 873-881. |
| 17 | SCHÖNBERGER J L, ZHENG E, FRAHM J M, et al. Pixelwise view selection for unstructured multi-view stereo[C]// Proceedings of the 2016 European Conference on Computer Vision, LNCS 9907. Cham: Springer, 2016: 501-518. |
| 18 | WOODFORD O, TORR P, REID I, et al. Global stereo reconstruction under second-order smoothness priors[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2009, 31(12): 2115-2128. |
| 19 | GALLUP D, FRAHM J M, POLLEFEYS M. Piecewise planar and non-planar stereo for urban scene reconstruction[C]// Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2010: 1418-1425. |
| 20 | XU Z, LIU Y, SHI X, et al. MARMVS: matching ambiguity reduced multiple view stereo for efficient large scale scene reconstruction[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 5980-5989. |
| 21 | SUN S, ZHENG Y, SHI X, et al. PHI-MVS: plane hypothesis inference multi-view stereo for large-scale scene reconstruction[EB/OL]. [2024-05-22].. |
| 22 | STATHOPOULOU E K, BATTISTI R, CERNEA D, et al. Semantically derived geometric constraints for MVS reconstruction of textureless areas[J]. Remote Sensing, 2021, 13(6): No.1053. |
| 23 | ROMANONI A, MATTEUCCI M. TAPA-MVS: textureless-aware PAtchMatch multi-view stereo[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 10412-10421. |
| 24 | XU Q, TAO W. Planar prior assisted PatchMatch multi-view stereo[C]// Proceedings of the 34th AAI Conference on Artificial Intelligence. Palo Alto, CA: AAAI Press, 2020: 12516-12523. |
| 25 | MOULON P, MONASSE P, PERROT R, et al. OpenMVG: open multiple view geometry[C]// Proceedings of the 2016 International Conference on Reproducible Research in Pattern Recognition, LNCS 10214. Cham: Springer, 2017: 60-74. |
| 26 | 中国科学院自动化研究所模式识别国家重点实验室. 中国古建筑三维重建数据集[DS/OL]. [2023-08-23].. |
| National Laboratory of Pattern Recognition of Institute of Automation of Chinese Academy of Sciences. Chinese ancient architecture 3D reconstruction dataset[DS/OL]. [2023-08-23].. | |
| 27 | SCHÖPS T, SCHÖNBERGER J L, GALLIANI S, et al. A multi-view stereo benchmark with high-resolution images and multi-camera videos[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 2538-2547. |
| 28 | KNAPITSCH A, PARK J, ZHOU Q Y, et al. Tanks and temples: benchmarking large-scale scene reconstruction[J]. ACM Transactions on Graphics, 2017, 36(4): No.78. |
| 29 | STRECHA C, VON HANSEN W, VAN GOOL L, et al. On benchmarking camera calibration and multi-view stereo for high resolution imagery[C]// Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2008: 1-8. |
| 30 | SEITZ S M, CURLESS B, DIEBEL J, et al. A comparison and evaluation of multi-view stereo reconstruction algorithms[C]// Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2006: 519-528. |
| 31 | FU C, HUANG N, HUANG Z, et al. Confidence-guided planar-recovering multiview stereo for weakly textured plane of high-resolution image scenes[J]. Remote Sensing, 2023, 15(9): No.2474. |
| 32 | XU Q, KONG W, TAO W, et al. Multi-scale geometric consistency guided and planar prior assisted multi-view stereo[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(4): 4945-4963. |
| 33 | STATHOPOULOU E K, BATTISTI R, CERNEA D, et al. Multiple view stereo with quadtree-guided priors[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2023, 196: 197-209. |
| 34 | KONG W, XU Q, SU W, et al. LGP-MVS: combined local and global planar priors guidance for indoor multi-view stereo[J]. The Visual Computer, 2023, 39(12): 6421-6433. |
| 35 | CERNEA D. OpenMVS: multi-view stereo reconstruction library[EB/OL]. [2024-05-22].. |
| 36 | WANG Y, ZENG Z, GUAN T, et al. Adaptive patch deformation for textureless-resilient multi-view stereo[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 1621-1630. |
| 37 | YUAN Z, CAO J, WANG Z, et al. TSAR-MVS: textureless-aware segmentation and correlative refinement guided multi-view stereo[J]. Pattern Recognition, 2024, 154: No.110565. |
| 38 | KUHN A, LIN S, ERDLER O. Plane completion and filtering for multi-view stereo reconstruction[C]// Proceedings of the 2019 DAGM German Conference on Pattern Recognition, LNCS 11824. Cham: Springer, 2019: 18-32. |
| 39 | Tanks and Temples Benchmark[DB/OL]. [2024-04-23]. . |
| [1] | Wei XIONG, Yibo CHEN, Lizhen ZHANG, Qian YANG, Qin ZOU. Self-supervised monocular depth estimation using multi-frame sequence images [J]. Journal of Computer Applications, 2024, 44(12): 3907-3914. |
| [2] | Meng ZHOU, Zhangjin HUANG. Focal stack depth estimation method based on defocus blur [J]. Journal of Computer Applications, 2023, 43(9): 2897-2903. |
| [3] | Wenju LI, Mengying LI, Liu CUI, Wanghui CHU, Yi ZHANG, Hui GAO. Monocular depth estimation method based on pyramid split attention network [J]. Journal of Computer Applications, 2023, 43(6): 1736-1742. |
| [4] | Wentao ZHANG, Yuanyu WANG, Saize LI. Depth estimation model of single haze image based on conditional generative adversarial network [J]. Journal of Computer Applications, 2022, 42(9): 2865-2875. |
| [5] | WEN Jing, LI Zhihong. Monocular image depth estimation method based on ResNeXt with squeeze-and-excitation module [J]. Journal of Computer Applications, 2021, 41(1): 215-219. |
| [6] | ZHANG Hao, ZHANG Qiang, SHAO Siyu, DING Haibin. Application of deep learning to 3D model reconstruction of single image [J]. Journal of Computer Applications, 2020, 40(8): 2351-2357. |
| [7] | LIAO Bin, LI Haowen. Image depth estimation model based on atrous convolutional neural network [J]. Journal of Computer Applications, 2019, 39(1): 267-274. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||