


Journal of Computer Applications ›› 2025, Vol. 45 ›› Issue (5): 1694-1702.DOI: 10.11772/j.issn.1001-9081.2024050632
• Multimedia computing and computer simulation • Previous Articles
Wenshuai WANG, Jun HAN( ), Guangyi HU, Keyu CHEN
), Guangyi HU, Keyu CHEN
Received:2024-05-17
Revised:2024-08-20
Accepted:2024-08-22
Online:2024-08-29
Published:2025-05-10
Contact:
Jun HAN
About author:WANG Wenshuai, born in 1996, M. S. candidate. His research interests include UAV inspection, depth estimation.Supported by:
王文帅, 韩军(), 胡广怡, 陈炣燏
通讯作者:
韩军
作者简介:王文帅(1996—),男,河南商丘人,硕士研究生,CCF会员,主要研究方向:无人机巡检、深度估计基金资助:CLC Number:
Wenshuai WANG, Jun HAN, Guangyi HU, Keyu CHEN. Refined inspection method for power transmission lines based on monocular vision[J]. Journal of Computer Applications, 2025, 45(5): 1694-1702.
王文帅, 韩军, 胡广怡, 陈炣燏. 基于单目视觉输电线路精细化巡检方法[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1694-1702.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2024050632

Fig. 1 Depth distance and azimuth perception phase of target for inspection
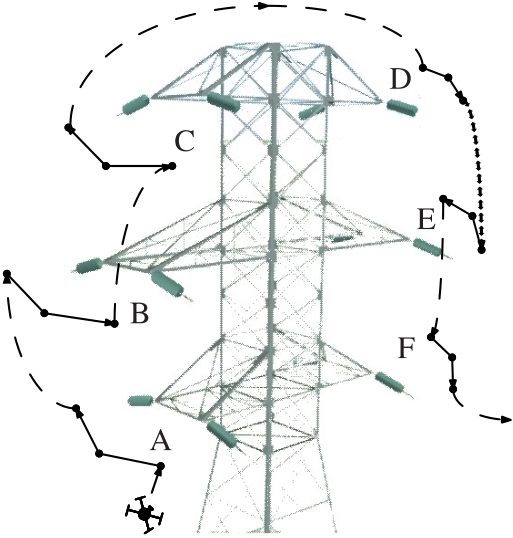
Fig. 2 Schematic diagram of UAV inspection for tower
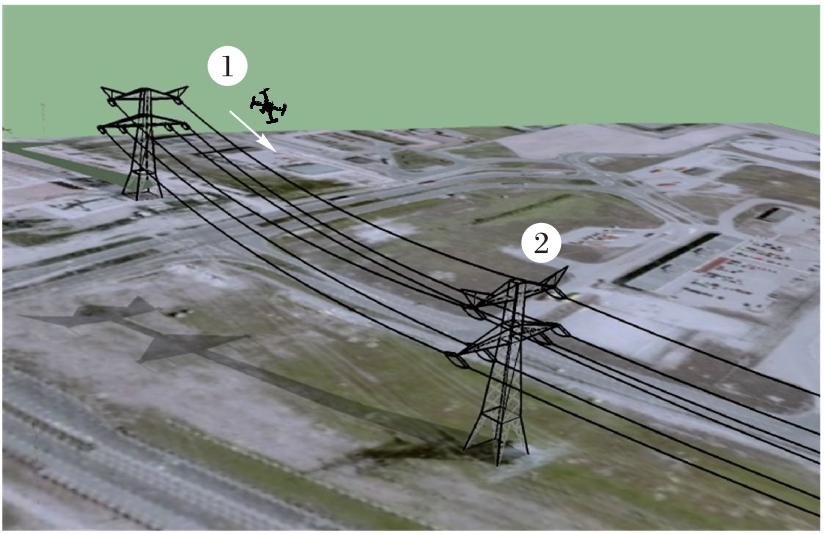
Fig. 3 Schematic diagram of UAV inspection for conductors
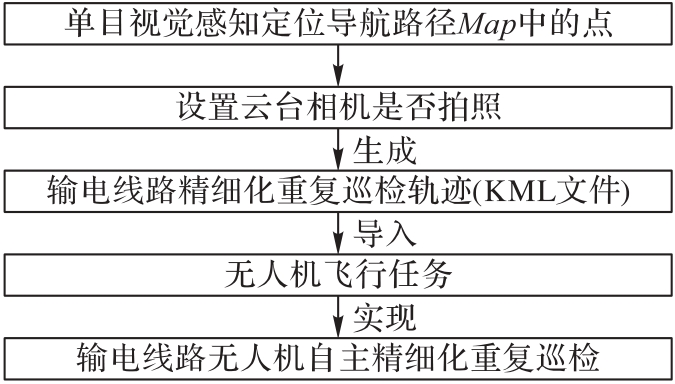
Fig. 4 Refined repetitive inspection trajectory generation phase for power transmission lines
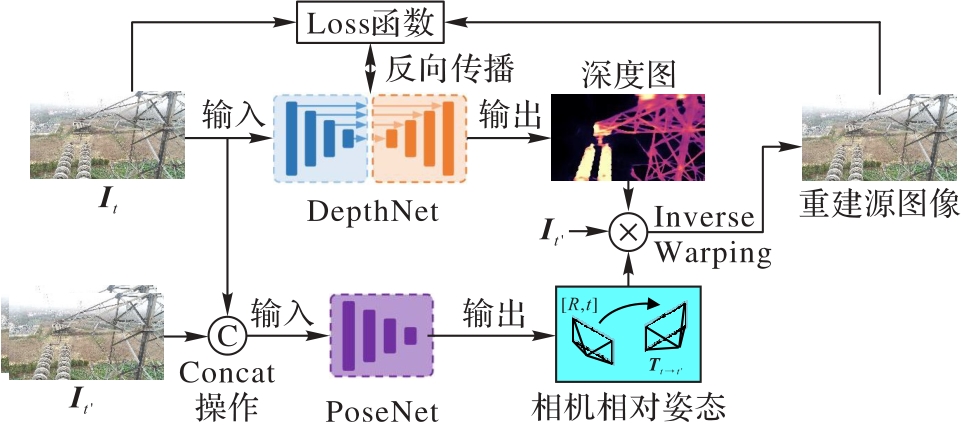
Fig. 5 Principle of monocular depth estimation algorithm
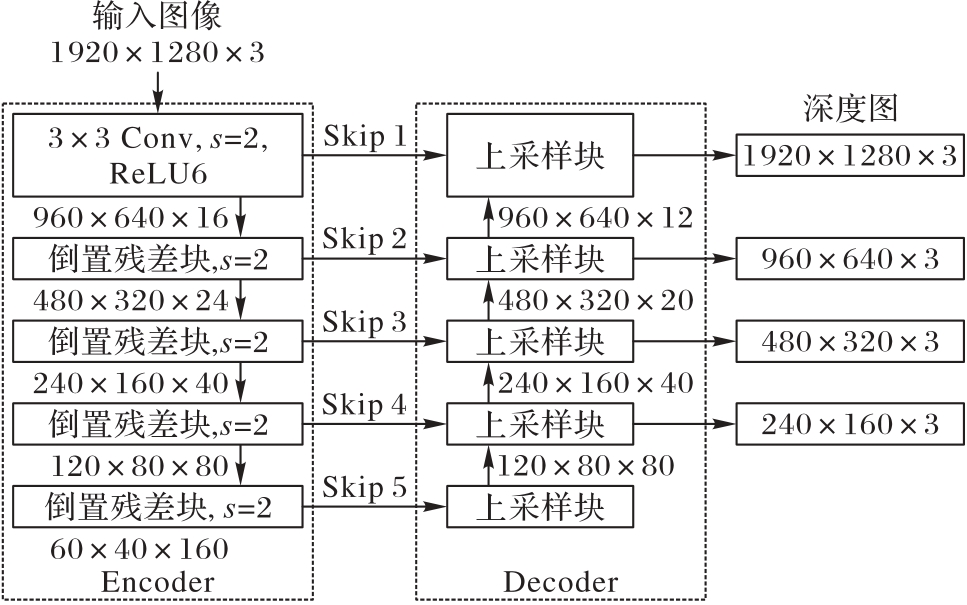
Fig. 6 Model of improved DepthNet
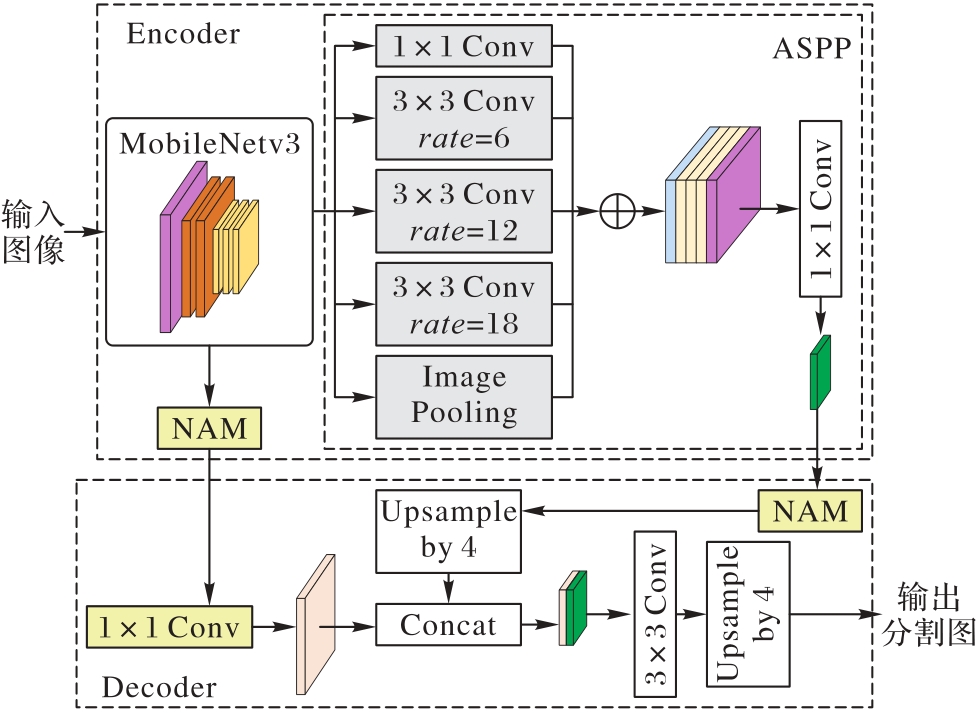
Fig. 7 Overall structure of Fast-DeepLabv3+

Fig. 8 Output results of Fast-DeepLabv3+
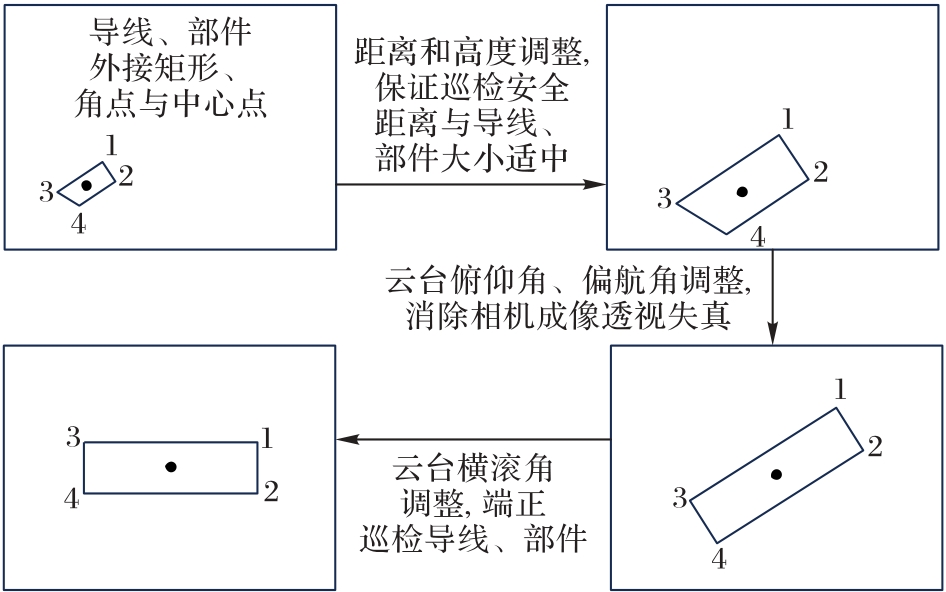
Fig. 9 Schematic diagram of overall adjustment process of UAV position and gimbal camera posture
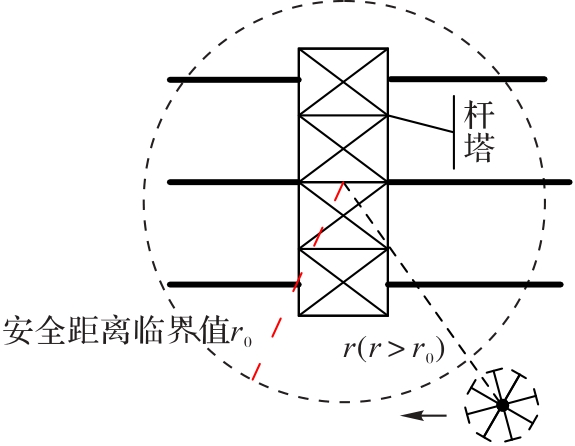
Fig. 10 Schematic diagram of UAV safe inspection
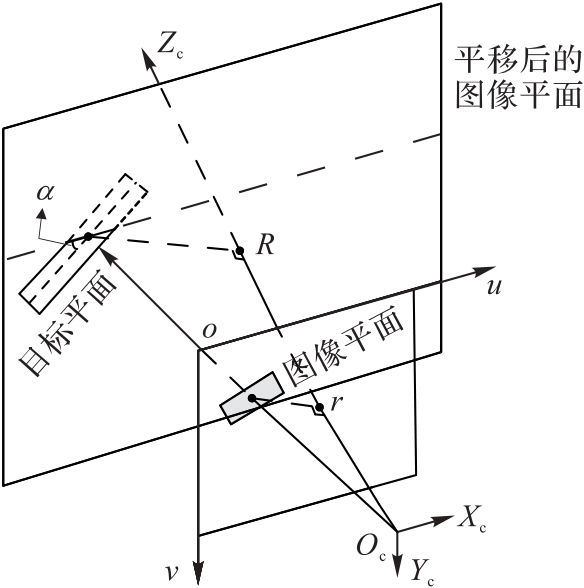
Fig. 11 Imaging principle of gimbal camera
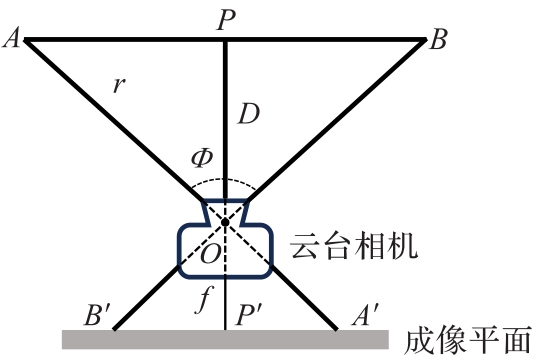
Fig. 12 Conductor inspection method
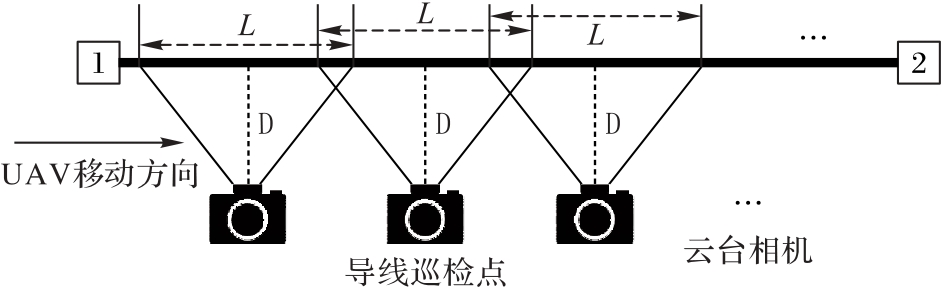
Fig. 13 Schematic diagram of conductor inspection points
| 名称 | 标签 | 值 |
|---|---|---|
| 航点 | <coordinates> | 经度、纬度、高度 |
| <data name="yaw"> | 无人机偏航角 | |
| <data name="pitch"> | 无人机俯仰角 | |
| <data name="roll"> | 无人机横滚角 | |
| <actions label="takePhoto"> | 是否拍照(True or False) | |
| <data name="cameraYaw"> | 云台相机偏航角 | |
| <data name="cameraPitch"> | 云台相机俯仰角 | |
| <data name="cameraRoll"> | 云台相机横滚角 | |
| 航线 | <coordinates> | 所有航点的经度、纬度、高度 |
| <flightSpeed> | 航线无人机飞行速度 | |
| <actionOnFinish> | 航线任务完成后无人机操作 |
Tab. 1 Information of KML file related settings
| 名称 | 标签 | 值 |
|---|---|---|
| 航点 | <coordinates> | 经度、纬度、高度 |
| <data name="yaw"> | 无人机偏航角 | |
| <data name="pitch"> | 无人机俯仰角 | |
| <data name="roll"> | 无人机横滚角 | |
| <actions label="takePhoto"> | 是否拍照(True or False) | |
| <data name="cameraYaw"> | 云台相机偏航角 | |
| <data name="cameraPitch"> | 云台相机俯仰角 | |
| <data name="cameraRoll"> | 云台相机横滚角 | |
| 航线 | <coordinates> | 所有航点的经度、纬度、高度 |
| <flightSpeed> | 航线无人机飞行速度 | |
| <actionOnFinish> | 航线任务完成后无人机操作 |
Fig. 14 Schematic diagram of refined inspection trajectory for power transmission lines
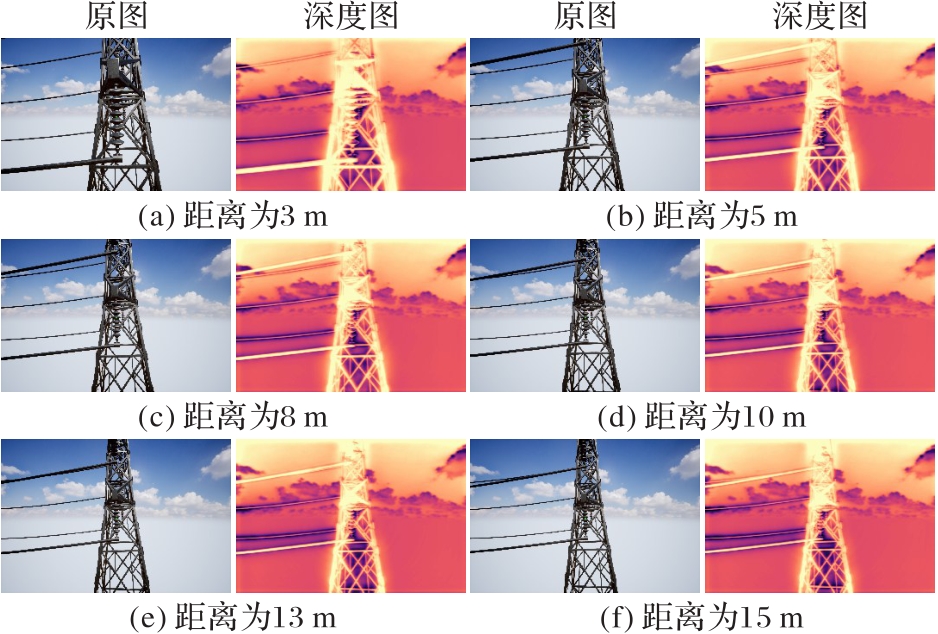
Fig. 15 Depth maps output by depth perception algorithm at different distances
| 样本序号 | 实际距离/m | 感知距离/m | 绝对误差/m | 相对误差/% |
|---|---|---|---|---|
| 1 | 3 | 3.15 | 0.15 | 5.0 |
| 2 | 5 | 5.18 | 0.18 | 3.6 |
| 3 | 8 | 7.80 | 0.20 | 2.5 |
| 4 | 10 | 10.21 | 0.21 | 2.1 |
| 5 | 13 | 12.81 | 0.19 | 1.5 |
| 6 | 15 | 15.32 | 0.32 | 2.1 |
Tab. 2 Insulator depth output by depth perception algorithm and true depth
| 样本序号 | 实际距离/m | 感知距离/m | 绝对误差/m | 相对误差/% |
|---|---|---|---|---|
| 1 | 3 | 3.15 | 0.15 | 5.0 |
| 2 | 5 | 5.18 | 0.18 | 3.6 |
| 3 | 8 | 7.80 | 0.20 | 2.5 |
| 4 | 10 | 10.21 | 0.21 | 2.1 |
| 5 | 13 | 12.81 | 0.19 | 1.5 |
| 6 | 15 | 15.32 | 0.32 | 2.1 |
| 算法 | 图像分辨率 | 设备 | 推理时间/ms | FPS |
|---|---|---|---|---|
| Monodepth2 | 512×512 | 3080ti | 11.1 | 90.1 |
| 512×512 | TX2 | 74.1 | 13.5 | |
| Fast-Monodepth2 | 512×512 | 3080ti | 5.8 | 172.4 |
| 512×512 | TX2 | 41.2 | 24.3 |
Tab. 3 Inference speed comparison of depth perception algorithm on servers and edge computing devices
| 算法 | 图像分辨率 | 设备 | 推理时间/ms | FPS |
|---|---|---|---|---|
| Monodepth2 | 512×512 | 3080ti | 11.1 | 90.1 |
| 512×512 | TX2 | 74.1 | 13.5 | |
| Fast-Monodepth2 | 512×512 | 3080ti | 5.8 | 172.4 |
| 512×512 | TX2 | 41.2 | 24.3 |
| 算法 | 参数量/106 | AbsRel | RMSE | |
|---|---|---|---|---|
| 基线(Monodepth2) | 14.40 | 0.125 | 6.109 | 0.861 |
| +倒置残差块 | 6.00 | 0.125 | 6.189 | 0.856 |
| +解码端上采样块 | 3.01 | 0.127 | 6.192 | 0.853 |
| +跳跃连接 | 3.07 | 0.124 | 6.156 | 0.857 |
Tab. 4 Ablation experimental results of Fast-Monodepth2
| 算法 | 参数量/106 | AbsRel | RMSE | |
|---|---|---|---|---|
| 基线(Monodepth2) | 14.40 | 0.125 | 6.109 | 0.861 |
| +倒置残差块 | 6.00 | 0.125 | 6.189 | 0.856 |
| +解码端上采样块 | 3.01 | 0.127 | 6.192 | 0.853 |
| +跳跃连接 | 3.07 | 0.124 | 6.156 | 0.857 |
| 算法 | 参数量/106 | AbsRel | RMSE | |
|---|---|---|---|---|
| MonoViT[ | 81.20 | 0.123 | 6.059 | 0.866 |
| MonoFormer[ | 138.00 | 0.114 | 5.896 | 0.872 |
| Fast-Monodepth2 | 3.07 | 0.124 | 6.156 | 0.857 |
Tab. 5 Performance comparison of different monocular depth perception algorithms
| 算法 | 参数量/106 | AbsRel | RMSE | |
|---|---|---|---|---|
| MonoViT[ | 81.20 | 0.123 | 6.059 | 0.866 |
| MonoFormer[ | 138.00 | 0.114 | 5.896 | 0.872 |
| Fast-Monodepth2 | 3.07 | 0.124 | 6.156 | 0.857 |
| 算法 | MIoU | MPA | MRecall |
|---|---|---|---|
| Fast-SCNN[ | 76.02 | 91.06 | 91.06 |
| Lightweight-DeepLabV3+[ | 77.81 | 91.24 | 91.24 |
| DeepLabv3+ | 80.38 | 91.59 | 91.59 |
| Fast-DeepLabv3+ | 78.38 | 91.32 | 91.32 |
Tab. 6 Performance comparison of segmentation and localization of different algorithms
| 算法 | MIoU | MPA | MRecall |
|---|---|---|---|
| Fast-SCNN[ | 76.02 | 91.06 | 91.06 |
| Lightweight-DeepLabV3+[ | 77.81 | 91.24 | 91.24 |
| DeepLabv3+ | 80.38 | 91.59 | 91.59 |
| Fast-DeepLabv3+ | 78.38 | 91.32 | 91.32 |
| 网络 | 图像分辨率 | 设备 | 推理时间/ms | FPS |
|---|---|---|---|---|
| DeepLabv3+ | 512×512 | 3080ti | 35.9 | 27.8 |
| 512×512 | TX2 | 322.6 | 3.1 | |
| Fast-DeepLabv3+ | 512×512 | 3080ti | 19.0 | 52.6 |
| 512×512 | TX2 | 121.9 | 8.2 |
Tab. 7 Comparison of inference speeds of different networks
| 网络 | 图像分辨率 | 设备 | 推理时间/ms | FPS |
|---|---|---|---|---|
| DeepLabv3+ | 512×512 | 3080ti | 35.9 | 27.8 |
| 512×512 | TX2 | 322.6 | 3.1 | |
| Fast-DeepLabv3+ | 512×512 | 3080ti | 19.0 | 52.6 |
| 512×512 | TX2 | 121.9 | 8.2 |
| 网络 | MIoU | MPA | MRecall |
|---|---|---|---|
| 基线(DeepLabv3+) | 80.38 | 91.59 | 91.59 |
| +MobileNetv3 | 77.06 | 91.18 | 91.18 |
| +NAM | 78.21 | 91.30 | 91.30 |
| +CE_Loss-Dice_Loss | 78.38 | 91.32 | 91.32 |
Tab. 8 Ablation experimental results of Fast-DeepLabv3+
| 网络 | MIoU | MPA | MRecall |
|---|---|---|---|
| 基线(DeepLabv3+) | 80.38 | 91.59 | 91.59 |
| +MobileNetv3 | 77.06 | 91.18 | 91.18 |
| +NAM | 78.21 | 91.30 | 91.30 |
| +CE_Loss-Dice_Loss | 78.38 | 91.32 | 91.32 |
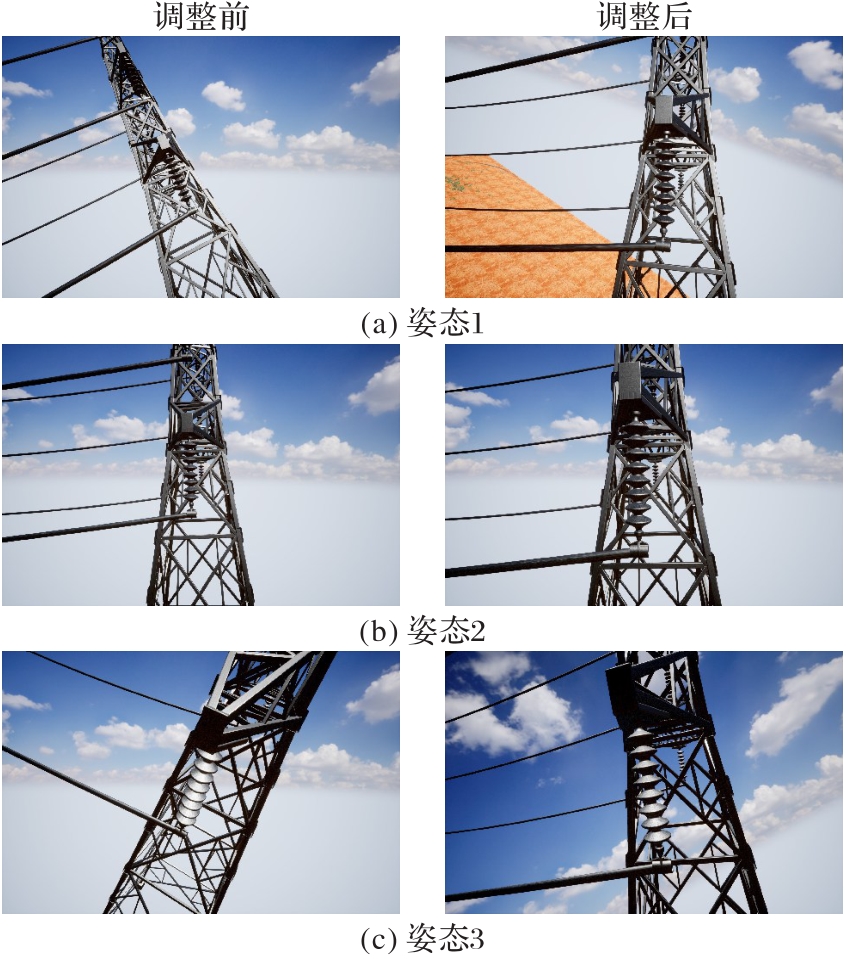
Fig. 16 Comparison of UAV position and gimbal camera posture before and after adjustment
| 姿态 | 调整前 | 调整后(最优巡检点) | 余弦相似度 |
|---|---|---|---|
| 1 | 经度:-122.140 777°,纬度:47.640 658°,高度:45 m | 经度:-122.142 318°,纬度:47.640 704°,高度:45 m 无人机姿态: | 0.989 |
| 2 | 经度:-122.140 745°,纬度:47.641 468°,高度:45 m 无人机姿态: 云台相机姿态: | 经度:-122.141 922°,纬度:47.641 461°,高度:45 m 无人机姿态: 云台相机姿态: | 0.999 |
| 3 | 经度:-122.139 102°,纬度:47.641 619°,高度:45 m 无人机姿态: 云台相机姿态: | 经度:-122.139 549°,纬度:47.641 470°,高度:45 m 无人机姿态: 云台相机姿态: | 0.979 |
Tab. 9 Information of UAV position and gimbal camera posture before and after adjustment
| 姿态 | 调整前 | 调整后(最优巡检点) | 余弦相似度 |
|---|---|---|---|
| 1 | 经度:-122.140 777°,纬度:47.640 658°,高度:45 m | 经度:-122.142 318°,纬度:47.640 704°,高度:45 m 无人机姿态: | 0.989 |
| 2 | 经度:-122.140 745°,纬度:47.641 468°,高度:45 m 无人机姿态: 云台相机姿态: | 经度:-122.141 922°,纬度:47.641 461°,高度:45 m 无人机姿态: 云台相机姿态: | 0.999 |
| 3 | 经度:-122.139 102°,纬度:47.641 619°,高度:45 m 无人机姿态: 云台相机姿态: | 经度:-122.139 549°,纬度:47.641 470°,高度:45 m 无人机姿态: 云台相机姿态: | 0.979 |

Fig. 17 Transmission lines with 5-grade towers
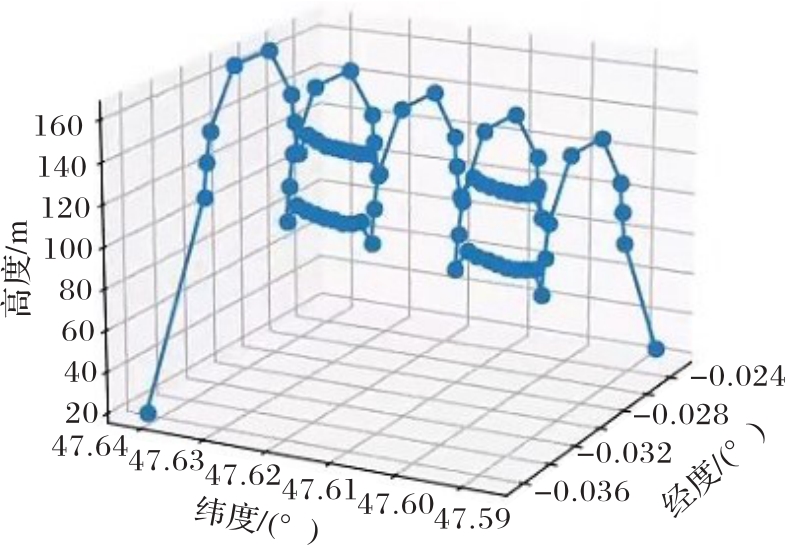
Fig. 18 Simulated refined autonomous inspection trajectory
| 1 | 甘鹏,方博,李博,等. 基于改进RRT的输电线路无人机自动巡检方法[J]. 电子设计工程, 2022, 30(21):39-42, 47. |
| GAN P, FANG B, LI B, et al. Automatic inspection method of transmission line by UAV based on improved RRT[J]. Electronic Design Engineering, 2022, 30(21): 39-42, 47. | |
| 2 | 徐其春,郭晨晨,刘志明,等. 无人机线路自主巡检的动态轨迹规划方法[J]. 电力系统及其自动化学报, 2022, 34(10):24-31. |
| XU Q C, GUO C C, LIU Z M, et al. Drone autonomous inspection method for transmission line based on dynamic trajectory planning[J]. Journal of the CSU-EPSA, 2022, 34(10): 24-31. | |
| 3 | 邓荣军,王斌,熊典,等. 基于遗传算法的输电线路无人机巡检路径规划[J]. 计算机测量与控制, 2015, 23(4):1299-1301. |
| DENG R J, WANG B, XIONG D, et al. A path planning for power transmission lines inspection with unmanned aerial vehicle based on genetic-pattern searching algorithm[J]. Computer Measurement and Control, 2015, 23(4): 1299-1301. | |
| 4 | CUI J, ZHANG Y, MA S, et al. Path planning algorithms for power transmission line inspection using unmanned aerial vehicles[C]// Proceedings of the 29th Chinese Control and Decision Conference. Piscataway: IEEE, 2017: 2304-2309. |
| 5 | 俞玉瑾,韩军,赵庆喜,等. 基于IHDR的自主学习巡检技术研究[J]. 计算机工程, 2019, 45(4):311-315, 320. |
| YU Y J, HAN J, ZHAO Q X, et al. Research on autonomous learning inspection technology based on IHDR[J]. Computer Engineering, 2019, 45(4): 311-315, 320. | |
| 6 | 戴永东,王永强,高超,等. 电力输电线路无人机巡检航线智能规划方法[J]. 重庆理工大学学报(自然科学), 2023, 37(9):253-260. |
| DAI Y D, WANG Y Q, GAO C, et al. Intelligent path planning method for unmanned serial vehicle inspection of power transmission lines[J]. Journal of Chongqing University of Technology (Natural Science), 2023, 37(9): 253-260. | |
| 7 | 金韬,王祎,杨洲. 基于高精度输电通道地图的无人机线路巡检航线规划方法研究[J]. 自动化与仪表, 2022, 37(4):1-5. |
| JIN T, WANG Y, YANG Z. Research on UAV line inspection route planning method based on high-precision transmission channel map[J]. Automation and Instrumentation, 2022, 37(4): 1-5. | |
| 8 | 彭炽刚.基于激光雷达点云数据的输电线路巡检航线自动规划方法[J].电子设计工程,2021,29(3):22-26. |
| PENG C G. Automatic planning method of transmission line inspection route based on lidar point cloud data[J]. Electronic Design Engineering, 2021, 29(3): 22-26. | |
| 9 | ALEXIOU D, TSIAKAS K, ZAMPOKAS G, et al. Cognitive fusion-based path planning for UAV inspection of power towers[C]// Proceedings of the 2023 IEEE International Conference on Imaging Systems and Techniques. Piscataway: IEEE, 2023: 1-6. |
| 10 | 梁文勇,吴大伟,谷山强,等. 输电线路多旋翼无人机精细化自主巡检航迹优化方法[J]. 高电压技术, 2020, 46(9):3054-3061. |
| LIANG W Y, WU D W, GU S Q, et al. Optimization method for fine autonomous inspection route of transmission lines by multi-rotor unmanned aerial vehicle[J]. High Voltage Engineering, 2020, 46(9): 3054-3061. | |
| 11 | HE T, ZENG Y, HU Z. Research of multi-rotor UAVs detailed autonomous inspection technology of transmission lines based on route planning[J]. IEEE Access, 2019, 7: 114955-114965. |
| 12 | GODARD C, AODHA O MAC, FIRMAN M, et al. Digging into self-supervised monocular depth estimation[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 3827-3837. |
| 13 | CHEN L C, ZHU Y, PAPANDREOU G, et al. Encoder-decoder with atrous separable convolution for semantic image segmentation[C]// Proceedings of the 2018 European Conference on Computer Vision, LNCS 11211. Cham: Springer, 2018: 833-851. |
| 14 | HOWARD A, SANDLER M, CHEN B, et al. Searching for MobileNetV3[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 1314-1324. |
| 15 | LIU Y, SHAO Z, TENG Y, et al. NAM: normalization-based attention module[EB/OL]. [2024-03-26].. |
| 16 | SHAH S, DEY D, LOVETT C, et al. AirSim: high-fidelity visual and physical simulation for autonomous vehicles[C]// Proceedings of 2017 International Conference on Field and Service Robotics, SPAR 5. Cham: Springer, 2018: 621-635. |
| 17 | ZHAO C, ZHANG Y, POGGI M, et al. MonoViT: self-supervised monocular depth estimation with a Vision Transformer[C]// Proceedings of the 2022 International Conference on 3D Vision. Piscataway: IEEE, 2022: 668-678. |
| 18 | BAE J, MOON S, IM S. Deep digging into the generalization of self-supervised monocular depth estimation[C]// Proceedings of the 37th AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2023: 187-196. |
| 19 | POUDEL R P K, LIWICKI S, CIPOLLA R. Fast-SCNN: fast semantic segmentation network[EB/OL]. [2024-03-26].. |
| 20 | 武锦龙,吴虹麒,李浩,等. 基于改进DeepLabV3+的荞麦苗期无人机遥感图像分割识别方法研究[J]. 农业机械学报, 2024, 55(5):186-195. |
| WU J L, WU H Q, LI H, et al. Segmentation of buckwheat by UAV based on improved lightweight DeepLabV3+ at seedling stage[J]. Transactions of the Chinese Society for Agricultural Machinery, 2024, 55(5): 186-195. |
| [1] | FU Zhenqi, SHAO Feng. Subjective and objective quality assessment for stereoscopic 3D retargeted images [J]. Journal of Computer Applications, 2019, 39(5): 1434-1439. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||