


Journal of Computer Applications ›› 2024, Vol. 44 ›› Issue (10): 3151-3157.DOI: 10.11772/j.issn.1001-9081.2023101414
• Advanced computing • Previous Articles Next Articles
Antai SUN, Ye LIU( ), Dongmei XU
), Dongmei XU
Received:2023-10-18
Revised:2024-03-03
Accepted:2024-03-08
Online:2024-10-15
Published:2024-10-10
Contact:
Ye LIU
About author:SUN Antai, born in 2000, M. S. candidate. His research interests include multi-agent system, adaptive control.Supported by:
孙安泰, 刘烨(), 徐冬梅
通讯作者:
刘烨
作者简介:孙安泰(2000—),男,山东菏泽人,硕士研究生,主要研究方向:多智能体系统、自适应控制基金资助:CLC Number:
Antai SUN, Ye LIU, Dongmei XU. Dynamic surface asymptotic compensation algorithm for multi-agent systems[J]. Journal of Computer Applications, 2024, 44(10): 3151-3157.
孙安泰, 刘烨, 徐冬梅. 多智能体系统的动态面渐近补偿算法[J]. 《计算机应用》唯一官方网站, 2024, 44(10): 3151-3157.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2023101414
Fig. 1 Communication topology structure
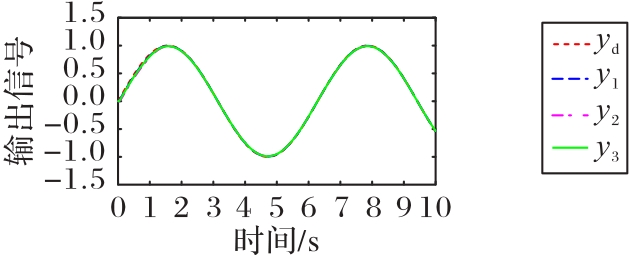
Fig. 2 Tracking performance of follower tracking leader output

Fig. 3 Consensus errors

Fig. 4 Dynamic pseudo inverse variables

Fig. 5 Control signals
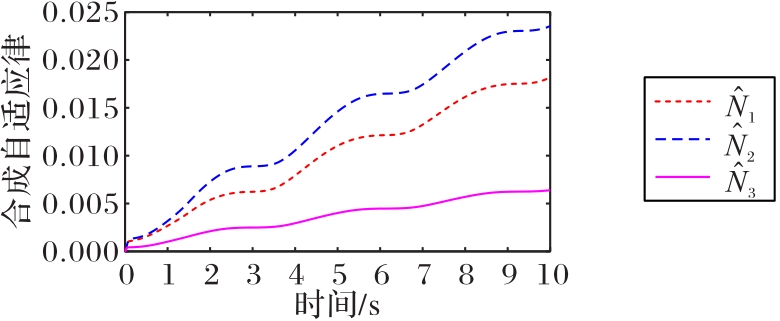
Fig. 6 Synthetic adaptive law
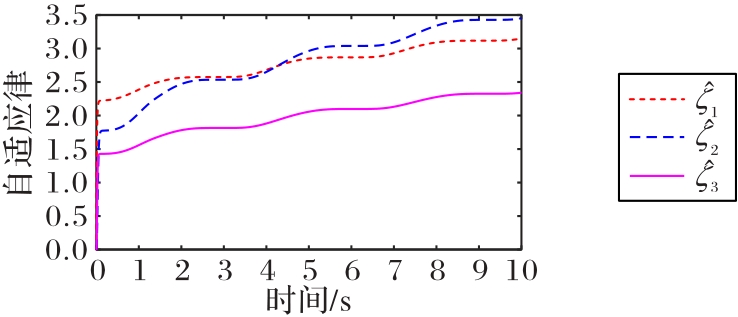
Fig. 7 Adaptive law
| 1 | XI C, DONG J. Event-triggered adaptive fuzzy distributed tracking control for uncertain nonlinear multi-agent systems[J]. Fuzzy Sets and Systems, 2021, 402: 35-50. |
| 2 | ZHANG Y, SUN J, LIANG H, et al. Event-triggered adaptive tracking control for multiagent systems with unknown disturbances[J]. IEEE Transactions on Cybernetics, 2020, 50(3): 890-901. |
| 3 | TANG Y, GAO H, ZOU W, et al. Distributed synchronization in networks of agent systems with nonlinearities and random switchings[J]. IEEE Transactions on Cybernetics, 2013, 43(1): 358-370. |
| 4 | SHEN Q, SHI P. Distributed command filtered backstepping consensus tracking control of nonlinear multiple-agent systems in strict-feedback form[J]. Automatica, 2015, 53: 120-124. |
| 5 | WANG L, DONG J, XI C. Event-triggered adaptive consensus for fuzzy output-constrained multi-agent systems with observers[J]. Journal of the Franklin Institute, 2020, 357(1): 82-105. |
| 6 | ZHANG X, WU J, ZHAN X, et al. Event-triggered adaptive time-varying formation tracking of multi-agent system with a leader of nonzero input[J]. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2023, 70(6): 2016-2020. |
| 7 | YU J, DONG X, LI Q, et al. Adaptive practical optimal time-varying formation tracking control for disturbed high-order multi-agent systems[J]. IEEE Transactions on Circuits and Systems Ⅰ: Regular Papers, 2022, 69(6): 2567-2578. |
| 8 | SHOU Y, XU B, LU H, et al. Finite‑time formation control and obstacle avoidance of multi‑agent system with application[J]. International Journal of Robust and Nonlinear Control, 2021, 32(5): 2883-2901. |
| 9 | JIANG M, YANG Y, GAO C, et al. Command filtered backstepping‑based containment control for a class of multi‑agent systems with uncertainty[J]. International Journal of Robust and Nonlinear Control, 2023, 33(17): 10567-10583. |
| 10 | ZHANG H, YANG H, YUAN J, et al. Observer-based adaptive neural networks bipartite containment control of multiagent systems with input quantization[C]// Proceedings of the 2nd International Conference on Artificial Intelligence, Big Data and Algorithms. Piscataway: IEEE, 2022: 1-6. |
| 11 | SU S, JI Y. Fixed-time adaptive neural network synchronization control for teleoperation system with position error constraints and time-varying delay[J]. Nonlinear Dynamics, 2023, 111: 13053-13072. |
| 12 | PENG Z, WANG D, CHEN Z, et al. Adaptive dynamic surface control for formations of autonomous surface vehicles with uncertain dynamics[J]. IEEE Transactions on Control Systems Technology, 2013, 21(2): 513-520. |
| 13 | SWAROOP D, HEDRICK J K, YIP P P, et al. Dynamic surface control for a class of nonlinear systems[J]. IEEE Transactions on Automatic Control,2000, 45(10): 1893-1899. |
| 14 | MA J, ZHENG Z, LI P. Adaptive dynamic surface control of a class of nonlinear systems with unknown direction control gains and input saturation[J]. IEEE Transactions on Cybernetics, 2015, 45(4): 728-741. |
| 15 | WANG L, WU J, SUN W. Adaptive event-triggered control for uncertain nonlinear systems based command filtering[C]// Proceedings of the 2021 13th International Conference on Advanced Computational Intelligence. Piscataway: IEEE, 2021: 34-39. |
| 16 | SUN W, WU Y-Q, SUN Z-Y. Command filter-based finite-time adaptive fuzzy control for uncertain nonlinear systems with prescribed performance[J]. IEEE Transactions on Fuzzy Systems, 2020, 28(12): 3161-3170. |
| 17 | LI Y-X. Command filter adaptive asymptotic tracking of uncertain nonlinear systems with time-varying parameters and disturbances[J]. IEEE Transactions on Automatic Control, 2022, 67(6): 2973-2980. |
| 18 | 楚东港,刘烨.未知非线性多智能体系统的分布式有限时间自适应神经网络控制[J].仪表技术与传感器,2023(5):112-117,126. |
| CHU D G, LIU Y. Distributed finite-time adaptive neural network control for multi-agent systems with unknown nonlinear[J]. Instrument Technique and Sensor, 2023(5): 112-117,126. | |
| 19 | LIU Y-H. Dynamic surface asymptotic tracking of a class of uncertain nonlinear hysteretic systems using adaptive filters[J]. Journal of the Franklin Institute, 2018, 355(1): 123-140. |
| 20 | 王清华,刘烨,李洪芹,等.PI磁滞非线性系统的动态伪逆补偿控制算法[J].传感器与微系统,2023,42(8):119-122. |
| WANG Q H, LIU Y, LI H Q, et al. Dynamic pesudo inverse compensation control algorithm for PI hysteresis nonlinear systems[J]. Transducer and Misrosystem Technologies, 2023, 42(8): 119-122. | |
| 21 | ZHOU J, WEN C Y, LI T. Adaptive output feedback control of uncertain nonlinear systems with hysteresis nonlinearity [J]. IEEE Transactions on Automatic Control, 2012, 57(10): 2627-2633. |
| 22 | ZHANG X, WANG Y, WANG C, et al. Adaptive estimated inverse output-feedback quantized control for piezoelectric positioning stage[J]. IEEE Transactions on Cybernetics, 2019, 49(6): 2106-2118. |
| 23 | ZHOU M, ZHANG Y, JI K, et al. Model reference adaptive control based on KP model for magnetically controlled shape memory alloy actuators[J]. Journal of Applied Biomaterials & Functional Materials, 2017, 15(): 31-37. |
| 24 | LI Z, SHAN J, GABBERT U. Inverse compensation of hysteresis using Krasnoselskii-Pokrovskii model[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(2): 966-971. |
| 25 | ZHANG X, LIN Y. An adaptive output feedback dynamic surface control for a class of nonlinear systems with unknown backlash‐like hysteresis[J]. Asian Journal of Control, 2013, 15(2): 489-500. |
| 26 | LIU Z, LAI G, ZHANG Y, et al. Adaptive neural control for a class of nonlinear time-varying delay systems with unknown hysteresis[J]. IEEE Transactions on Neural Networks and Learning Systems, 2014, 25(12): 2129-2140. |
| 27 | WANG H, SHEN H, XIE X, et al. Robust adaptive neural control for pure-feedback stochastic nonlinear systems with Prandtl-Ishlinskii hysteresis[J]. Neurocomputing, 2018, 314: 169-176. |
| 28 | HE W, MENG T. Adaptive control of a flexible string system with input hysteresis[J]. IEEE Transactions on Control Systems Technology, 2018, 26(2): 693-700. |
| 29 | ZHANG X, LI Z, SU C-Y, et al. Robust adaptive output‑feedback control for a class of nonlinear systems with hysteresis compensation controller[J]. International Journal of Adaptive Control and Signal Processing, 2017, 31(11): 1636-1654. |
| 30 | ZHANG X, WANG J, LIU C. Robust adaptive dynamic surface control for metal cutting system with hysteresis input[C]// Proceedings of the 11th World Congress on Intelligent Control and Automation. Piscataway: IEEE, 2014: 1534-1539. |
| 31 | LIU Y, FANG Z, LI Y. Global decentralized output feedback control for interconnected time delay systems with saturated PI hysteresis[J]. Journal of the Franklin Institute, 2020, 357(9): 5460-5484. |
| 32 | REN B, SAN P P, GE S S, et al. Adaptive dynamic surface control for a class of strict-feedback nonlinear systems with unknown backlash-like hysteresis[C]// Proceedings of the 2009 American Control Conference. Piscataway: IEEE, 2009: 4482-4487. |
| 33 | SUN W, DIAO S, SU S-F, et al. Fixed-time adaptive neural network control for nonlinear systems with input saturation[J]. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(4): 1911-1920. |
| 34 | WANG C, WEN C, HU Q. Event-triggered adaptive control for a class of nonlinear systems with unknown control direction and sensor faults[J]. IEEE Transactions on Automatic Control, 2020, 65(2): 763-770. |
| [1] | YU Jiaxing, WEI Haiping, JIN Lina, WEI Yufeng. Average consensus of heterogeneous multi-agent based on model reference [J]. Journal of Computer Applications, 2019, 39(4): 1240-1246. |
| [2] | LIU Chenchen, YIN Yanyan, LIU Fei. Consensus of heterogeneous multi-agent systems with input and velocity saturation [J]. Journal of Computer Applications, 2018, 38(8): 2431-2436. |
| [3] | CHAI Yun, XIONG Tao. Second-order information based formation control in multi-Agent system [J]. Journal of Computer Applications, 2017, 37(8): 2264-2269. |
| [4] | ZHENG Yanbin, LI Bo, AN Deyu, LI Na. Multi-Agent path planning algorithm based on hierarchical reinforcement learning and artificial potential field [J]. Journal of Computer Applications, 2015, 35(12): 3491-3496. |
| [5] | DENG Tao YAO Hong PAN Yunliang. Adaptive dynamic surface control for a class of high-order stochastic nonlinear systems [J]. Journal of Computer Applications, 2013, 33(10): 3000-3004. |
| [6] | ZHENG Yan-bin GUO Ling-yun LIU Jing-jing. Research on decentralized communication decision in multi-Agent system [J]. Journal of Computer Applications, 2012, 32(10): 2875-2878. |
| [7] | Xing-hua YANG Wen-jie WANG Xiao-feng WANG Zhong-zhi SHI. Trust evaluation based on community discovery in multi-Agent system [J]. Journal of Computer Applications, 2011, 31(08): 2068-2071. |
| [8] | Jia-fang WANG Xiao-bo LI Zhi-yong FENG. Enterprise application integration framework based on multi-agent system [J]. Journal of Computer Applications, 2009, 29(4): 1151-1154. |
| [9] | Wen-Qiang GUO Zhi-Guang QIN. Research on RBFNNaided adaptive UKF algorithm [J]. Journal of Computer Applications, 2009, 29(3): 858-861. |
| [10] | . Research and implementation of RBFNN classification algorithm for digital signal modulation recognition [J]. Journal of Computer Applications, 2009, 29(3): 798-800. |
| [11] | . Multi-attributes task allocation model in MAS and VIKOR based on interval grey number [J]. Journal of Computer Applications, 2009, 29(08): 2272-2275. |
| [12] | . Optimization algorithm for MAS construction based on reliability analysis [J]. Journal of Computer Applications, 2009, 29(06): 1532-1535. |
| [13] | . Research of pattern language for Agent-based application [J]. Journal of Computer Applications, 2007, 27(4): 868-871. |
| [14] | . A computational trust model based on MAS in E-commerce [J]. Journal of Computer Applications, 2007, 27(3): 601-604. |
| [15] | . Raw material configuration by multi-agent negotiation [J]. Journal of Computer Applications, 2006, 26(12): 3008-3011. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||