


Journal of Computer Applications ›› 2025, Vol. 45 ›› Issue (10): 3342-3352.DOI: 10.11772/j.issn.1001-9081.2024101511
• Frontier and comprehensive applications • Previous Articles
Jiahui ZHANG, Xiaoming LI( ), Jiaxiang ZHANG
), Jiaxiang ZHANG
Received:2024-10-24
Revised:2025-01-07
Accepted:2025-01-10
Online:2025-01-15
Published:2025-10-10
Contact:
Xiaoming LI
About author:ZHANG Jiahui, born in 1999, M. S. candidate. Her research interests include computer vision, object detection.Supported by:
张佳慧, 李晓明(), 张嘉祥
通讯作者:
李晓明
作者简介:张佳慧(1999—),女,山西榆社人,硕士研究生,CCF会员,主要研究方向:计算机视觉、目标检测基金资助:CLC Number:
Jiahui ZHANG, Xiaoming LI, Jiaxiang ZHANG. Pavement defect detection algorithm with enhanced morphological perception[J]. Journal of Computer Applications, 2025, 45(10): 3342-3352.
张佳慧, 李晓明, 张嘉祥. 强化形态感知的路面缺陷检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(10): 3342-3352.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2024101511

Fig. 1 Network structure of improved YOLOv8_n

Fig. 2 Structure of EEFM
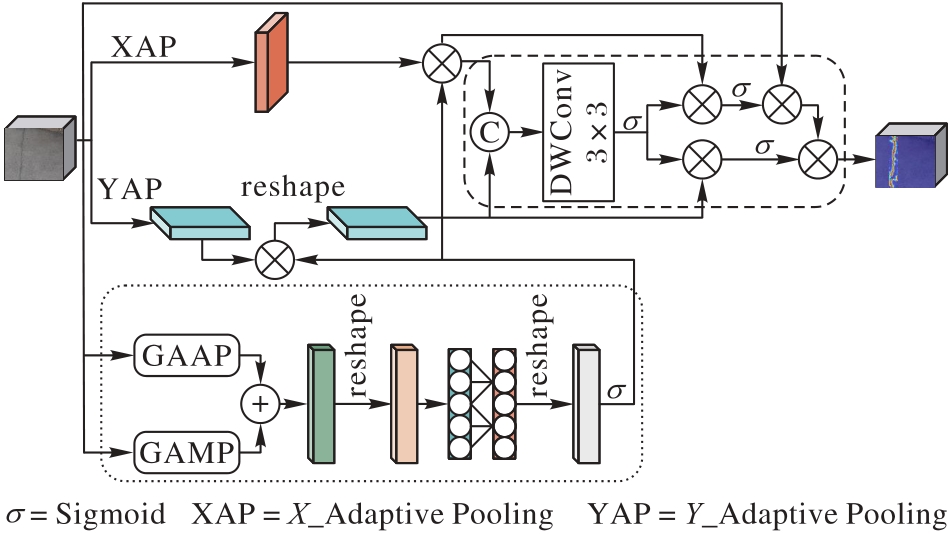
Fig. 3 Structure of MPCA
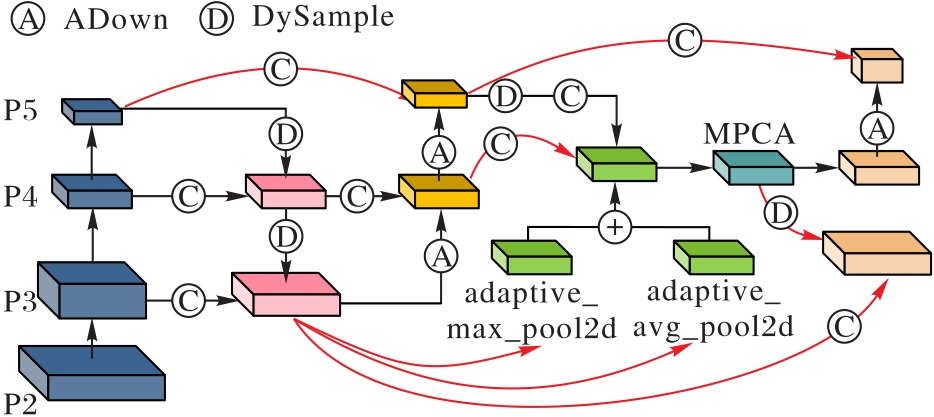
Fig. 4 Structure of DCFRPN
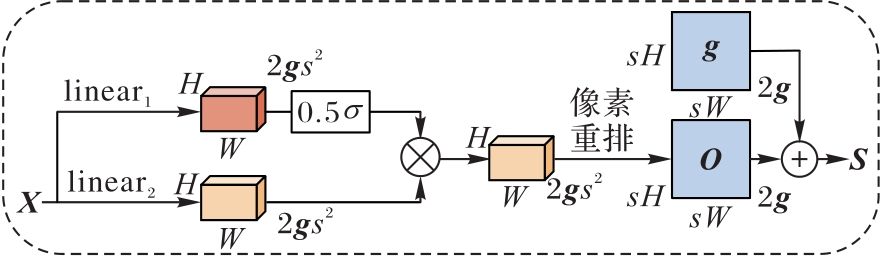
Fig. 5 Sampling point generator in DySample
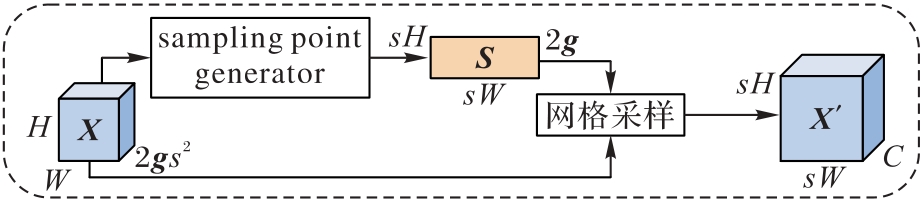
Fig. 6 Structure of DySample
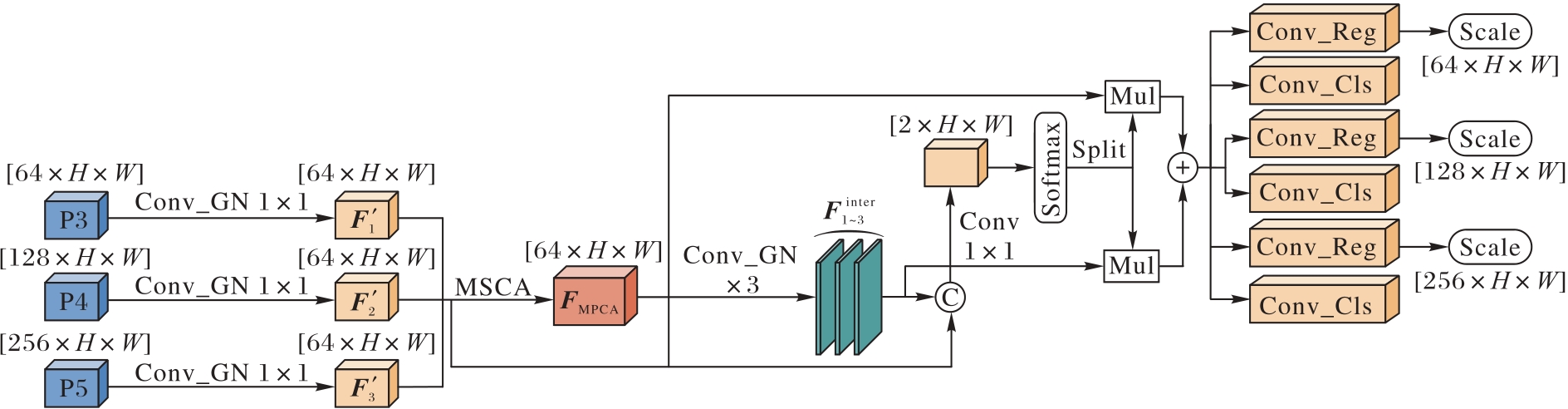
Fig. 7 Structure of MATIDH
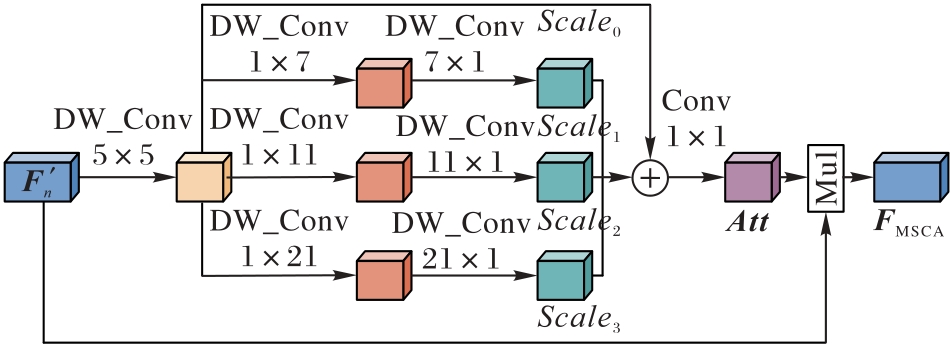
Fig. 8 Structure of MSCA
注意力 机制 | AP50 /% | mAP50 /% | mAP50:95 /% | Params/106 | |
|---|---|---|---|---|---|
| D00 | D10 | ||||
| Baseline | 59.2 | 59.9 | 58.9 | 30.3 | 3.01 |
| GAM | 60.3 | 58.5 | 58.1 | 30.3 | 5.28 |
| LSKA | 60.0 | 59.4 | 59.4 | 31.0 | 3.71 |
| DA | 56.8 | 57.1 | 57.5 | 28.3 | 3.91 |
| ConvFFN | 56.9 | 56.9 | 56.7 | 28.3 | 3.95 |
| AA | 57.4 | 57.4 | 57.7 | 28.6 | 3.98 |
| MPCA | 60.4 | 60.6 | 59.8 | 31.0 | 3.70 |
Tab. 1 Comparison of different attention mechanisms in EEFM
注意力 机制 | AP50 /% | mAP50 /% | mAP50:95 /% | Params/106 | |
|---|---|---|---|---|---|
| D00 | D10 | ||||
| Baseline | 59.2 | 59.9 | 58.9 | 30.3 | 3.01 |
| GAM | 60.3 | 58.5 | 58.1 | 30.3 | 5.28 |
| LSKA | 60.0 | 59.4 | 59.4 | 31.0 | 3.71 |
| DA | 56.8 | 57.1 | 57.5 | 28.3 | 3.91 |
| ConvFFN | 56.9 | 56.9 | 56.7 | 28.3 | 3.95 |
| AA | 57.4 | 57.4 | 57.7 | 28.6 | 3.98 |
| MPCA | 60.4 | 60.6 | 59.8 | 31.0 | 3.70 |
| 注意力机制 | AP50 /% | mAP50 /% | mAP50:95 /% | Params/106 | |
|---|---|---|---|---|---|
| D00 | D10 | ||||
| Baseline | 59.2 | 59.9 | 58.9 | 30.3 | 3.01 |
| LSKA | 60.7 | 60.5 | 59.8 | 30.9 | 2.37 |
| ConvFFN | 56.2 | 56.8 | 56.9 | 28.2 | 2.39 |
| MSCA | 60.9 | 60.7 | 60.1 | 31.1 | 2.38 |
Tab. 2 Comparison of different attention mechanisms in MATIDH
| 注意力机制 | AP50 /% | mAP50 /% | mAP50:95 /% | Params/106 | |
|---|---|---|---|---|---|
| D00 | D10 | ||||
| Baseline | 59.2 | 59.9 | 58.9 | 30.3 | 3.01 |
| LSKA | 60.7 | 60.5 | 59.8 | 30.9 | 2.37 |
| ConvFFN | 56.2 | 56.8 | 56.9 | 28.2 | 2.39 |
| MSCA | 60.9 | 60.7 | 60.1 | 31.1 | 2.38 |
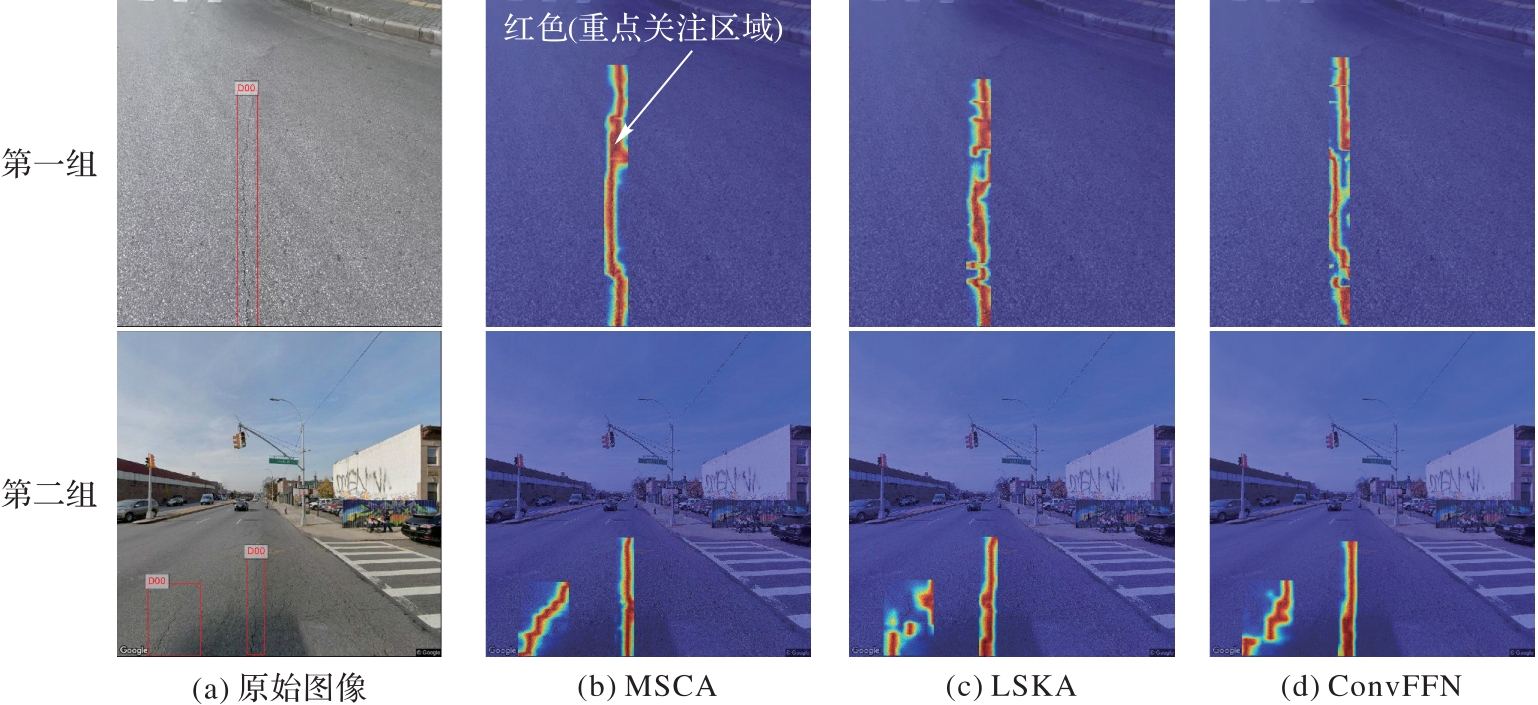
Fig. 9 Comparison of heat map visualization using different attention mechanisms in MATIDH
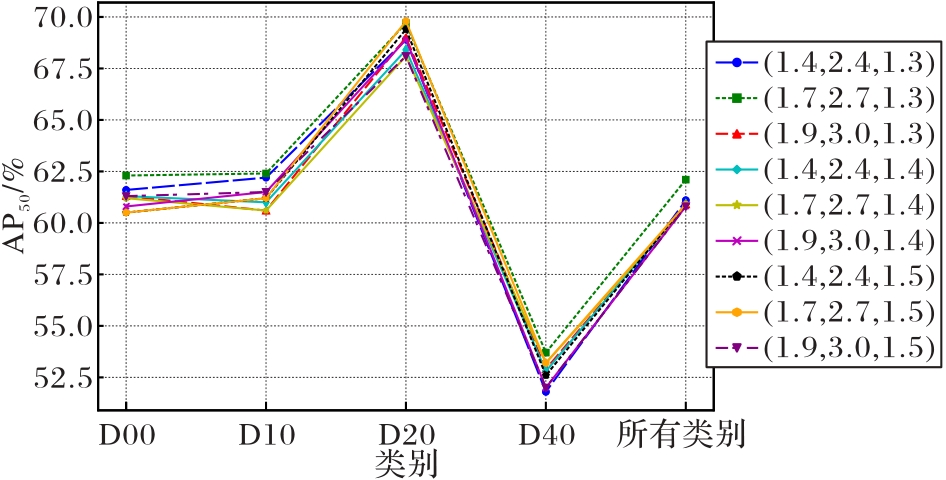
Fig. 10 Comparison experimental results of different hyperparameter combinations (α,δ,λ) in PWIoU
| IoU | AP50 | mAP50 | mAP50:95 | |||
|---|---|---|---|---|---|---|
| D00 | D10 | D20 | D40 | |||
| CIoU | 61.5 | 62.0 | 69.0 | 50.7 | 60.8 | 31.9 |
| WIoUv3 | 61.0 | 61.3 | 69.1 | 52.6 | 61.0 | 31.9 |
| WIoUv2 | 60.9 | 60.3 | 69.4 | 53.3 | 61.0 | 31.9 |
| WIoUv1 | 61.0 | 61.7 | 68.6 | 52.4 | 60.9 | 32.1 |
| PIoUv1 | 61.1 | 61.2 | 68.2 | 51.2 | 60.4 | 32.0 |
| PIoUv2 | 61.1 | 60.8 | 67.9 | 52.4 | 60.6 | 31.7 |
| PWIoU | 62.3 | 62.5 | 69.7 | 53.7 | 62.1 | 32.1 |
Tab. 3 Comparison experimental results on effectiveness of PWIoU loss function
| IoU | AP50 | mAP50 | mAP50:95 | |||
|---|---|---|---|---|---|---|
| D00 | D10 | D20 | D40 | |||
| CIoU | 61.5 | 62.0 | 69.0 | 50.7 | 60.8 | 31.9 |
| WIoUv3 | 61.0 | 61.3 | 69.1 | 52.6 | 61.0 | 31.9 |
| WIoUv2 | 60.9 | 60.3 | 69.4 | 53.3 | 61.0 | 31.9 |
| WIoUv1 | 61.0 | 61.7 | 68.6 | 52.4 | 60.9 | 32.1 |
| PIoUv1 | 61.1 | 61.2 | 68.2 | 51.2 | 60.4 | 32.0 |
| PIoUv2 | 61.1 | 60.8 | 67.9 | 52.4 | 60.6 | 31.7 |
| PWIoU | 62.3 | 62.5 | 69.7 | 53.7 | 62.1 | 32.1 |
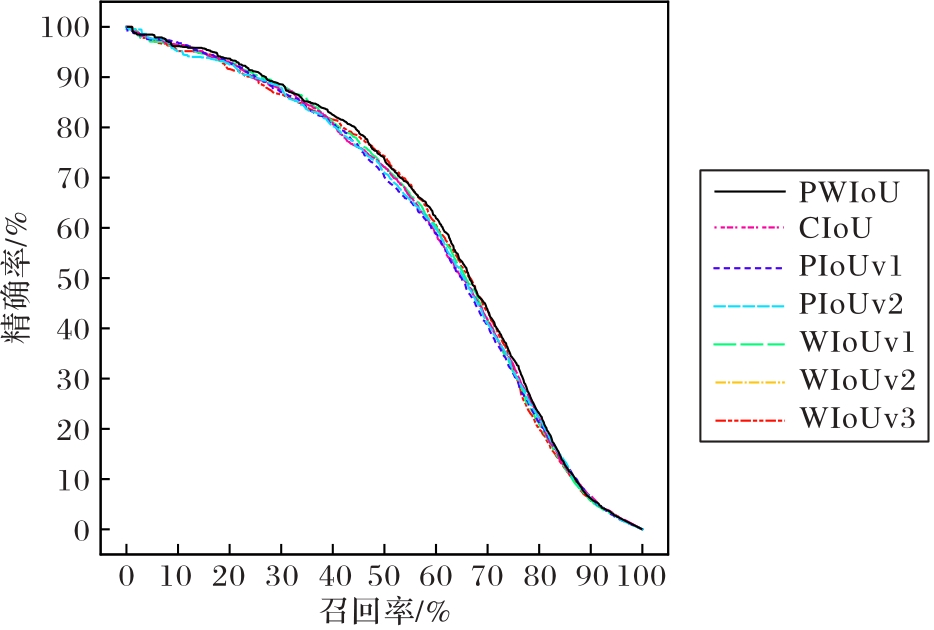
Fig. 11 Comparison of PR curves between PWIoU and six loss functions
| EEFM | PWIoU | MATIDH | DCFRPN | AP50 /% | P/% | R/% | mAP50 /% | 计算量/GFLOPS | Params/106 | |||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| D00 | D10 | D20 | D40 | |||||||||
| 59.2 | 59.9 | 67.9 | 48.6 | 63.8 | 54.4 | 58.9 | 8.2 | 3.01 | ||||
| √ | 60.4 | 60.6 | 67.8 | 50.2 | 65.0 | 54.4 | 59.8 | 8.8 | 3.70 | |||
| √ | 60.3 | 60.4 | 67.9 | 51.5 | 64.6 | 54.9 | 60.0 | 8.2 | 3.01 | |||
| √ | 60.9 | 60.7 | 68.1 | 50.7 | 64.8 | 54.4 | 60.1 | 8.0 | 2.45 | |||
| √ | 60.4 | 60.8 | 68.7 | 52.0 | 65.1 | 55.1 | 60.5 | 9.5 | 3.64 | |||
| √ | √ | 61.0 | 60.7 | 68.9 | 51.4 | 65.1 | 54.9 | 60.5 | 8.8 | 3.64 | ||
| √ | √ | √ | 61.7 | 61.8 | 69.1 | 52.6 | 67.2 | 56.4 | 61.3 | 7.6 | 3.02 | |
| √ | √ | √ | √ | 62.3 | 62.5 | 69.7 | 53.7 | 67.3 | 56.7 | 62.1 | 9.1 | 3.93 |
Tab. 4 Ablation experimental results of improved modules
| EEFM | PWIoU | MATIDH | DCFRPN | AP50 /% | P/% | R/% | mAP50 /% | 计算量/GFLOPS | Params/106 | |||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| D00 | D10 | D20 | D40 | |||||||||
| 59.2 | 59.9 | 67.9 | 48.6 | 63.8 | 54.4 | 58.9 | 8.2 | 3.01 | ||||
| √ | 60.4 | 60.6 | 67.8 | 50.2 | 65.0 | 54.4 | 59.8 | 8.8 | 3.70 | |||
| √ | 60.3 | 60.4 | 67.9 | 51.5 | 64.6 | 54.9 | 60.0 | 8.2 | 3.01 | |||
| √ | 60.9 | 60.7 | 68.1 | 50.7 | 64.8 | 54.4 | 60.1 | 8.0 | 2.45 | |||
| √ | 60.4 | 60.8 | 68.7 | 52.0 | 65.1 | 55.1 | 60.5 | 9.5 | 3.64 | |||
| √ | √ | 61.0 | 60.7 | 68.9 | 51.4 | 65.1 | 54.9 | 60.5 | 8.8 | 3.64 | ||
| √ | √ | √ | 61.7 | 61.8 | 69.1 | 52.6 | 67.2 | 56.4 | 61.3 | 7.6 | 3.02 | |
| √ | √ | √ | √ | 62.3 | 62.5 | 69.7 | 53.7 | 67.3 | 56.7 | 62.1 | 9.1 | 3.93 |
| 算法 | AP50 /% | mAP50 /% | mAP50:95 /% | P/% | R/% | 计算量/GFLOPS | Params/106 | |||
|---|---|---|---|---|---|---|---|---|---|---|
| D00 | D10 | D20 | D40 | |||||||
| Faster R-CNN[ | 61.9 | 60.1 | 63.8 | 52.4 | 59.5 | 27.5 | 52.3 | 52.9 | 121.45 | 60.13 |
| FCOS | 60.0 | 52.2 | 65.0 | 51.5 | 57.2 | 25.9 | 58.9 | 42.5 | 109.12 | 50.78 |
| VFNet[ | 61.8 | 58.6 | 64.1 | 50.2 | 58.7 | 28.6 | 48.0 | 52.4 | 106.04 | 51.48 |
| TOOD | 61.5 | 59.2 | 64.6 | 50.5 | 58.9 | 28.4 | 55.9 | 48.5 | 153.00 | 53.81 |
| YOLOv5_s | 60.9 | 59.9 | 68.4 | 51.8 | 60.2 | 30.9 | 65.7 | 55.3 | 24.00 | 9.12 |
| YOLOv5_n | 58.6 | 57.9 | 66.3 | 46.9 | 57.4 | 29.0 | 66.2 | 50.9 | 7.10 | 2.50 |
| YOLOX_s | 61.8 | 60.3 | 69.1 | 53.1 | 61.1 | 29.8 | 63.9 | 56.5 | 13.30 | 8.94 |
| YOLOv7_t[ | 60.7 | 56.7 | 65.4 | 52.2 | 58.8 | 27.7 | 63.6 | 54.5 | 13.20 | 6.02 |
| YOLOv8_n | 59.2 | 59.9 | 67.9 | 48.6 | 58.9 | 30.3 | 63.8 | 54.4 | 8.20 | 3.01 |
| Gold-YOLO[ | 60.2 | 59.9 | 67.8 | 51.8 | 59.9 | 29.7 | 63.5 | 56.4 | 12.05 | 5.61 |
| RT-DETR-l[ | 60.5 | 60.2 | 61.3 | 54.7 | 59.2 | 29.0 | 63.5 | 55.2 | 105.20 | 29.30 |
| Swin-T[ | 57.8 | 47.5 | 67.7 | 49.5 | 55.6 | 25.0 | 48.0 | 49.0 | 83.94 | 36.88 |
| YOLOv9_n | 59.9 | 59.2 | 65.7 | 44.4 | 57.3 | 29.1 | 64.1 | 52.3 | 10.70 | 2.62 |
| YOLOv10_n[ | 58.0 | 56.6 | 66.4 | 45.0 | 56.5 | 29.1 | 61.5 | 52.7 | 8.20 | 2.70 |
| YOLOv10_s | 60.1 | 58.0 | 67.8 | 50.4 | 59.1 | 30.8 | 65.9 | 53.0 | 24.50 | 8.04 |
| YOLOv11_n | 53.2 | 54.5 | 63.6 | 40.4 | 53.0 | 26.2 | 61.0 | 49.5 | 6.30 | 2.58 |
| YOLOv11_s | 56.6 | 57.5 | 65.3 | 47.9 | 56.8 | 28.2 | 62.4 | 54.2 | 21.30 | 9.41 |
| 本文算法 | 62.3 | 62.5 | 69.7 | 53.7 | 62.1 | 32.1 | 67.3 | 56.7 | 9.10 | 3.93 |
Tab. 5 Comparison experimental results of proposed algorithm and mainstream algorithms
| 算法 | AP50 /% | mAP50 /% | mAP50:95 /% | P/% | R/% | 计算量/GFLOPS | Params/106 | |||
|---|---|---|---|---|---|---|---|---|---|---|
| D00 | D10 | D20 | D40 | |||||||
| Faster R-CNN[ | 61.9 | 60.1 | 63.8 | 52.4 | 59.5 | 27.5 | 52.3 | 52.9 | 121.45 | 60.13 |
| FCOS | 60.0 | 52.2 | 65.0 | 51.5 | 57.2 | 25.9 | 58.9 | 42.5 | 109.12 | 50.78 |
| VFNet[ | 61.8 | 58.6 | 64.1 | 50.2 | 58.7 | 28.6 | 48.0 | 52.4 | 106.04 | 51.48 |
| TOOD | 61.5 | 59.2 | 64.6 | 50.5 | 58.9 | 28.4 | 55.9 | 48.5 | 153.00 | 53.81 |
| YOLOv5_s | 60.9 | 59.9 | 68.4 | 51.8 | 60.2 | 30.9 | 65.7 | 55.3 | 24.00 | 9.12 |
| YOLOv5_n | 58.6 | 57.9 | 66.3 | 46.9 | 57.4 | 29.0 | 66.2 | 50.9 | 7.10 | 2.50 |
| YOLOX_s | 61.8 | 60.3 | 69.1 | 53.1 | 61.1 | 29.8 | 63.9 | 56.5 | 13.30 | 8.94 |
| YOLOv7_t[ | 60.7 | 56.7 | 65.4 | 52.2 | 58.8 | 27.7 | 63.6 | 54.5 | 13.20 | 6.02 |
| YOLOv8_n | 59.2 | 59.9 | 67.9 | 48.6 | 58.9 | 30.3 | 63.8 | 54.4 | 8.20 | 3.01 |
| Gold-YOLO[ | 60.2 | 59.9 | 67.8 | 51.8 | 59.9 | 29.7 | 63.5 | 56.4 | 12.05 | 5.61 |
| RT-DETR-l[ | 60.5 | 60.2 | 61.3 | 54.7 | 59.2 | 29.0 | 63.5 | 55.2 | 105.20 | 29.30 |
| Swin-T[ | 57.8 | 47.5 | 67.7 | 49.5 | 55.6 | 25.0 | 48.0 | 49.0 | 83.94 | 36.88 |
| YOLOv9_n | 59.9 | 59.2 | 65.7 | 44.4 | 57.3 | 29.1 | 64.1 | 52.3 | 10.70 | 2.62 |
| YOLOv10_n[ | 58.0 | 56.6 | 66.4 | 45.0 | 56.5 | 29.1 | 61.5 | 52.7 | 8.20 | 2.70 |
| YOLOv10_s | 60.1 | 58.0 | 67.8 | 50.4 | 59.1 | 30.8 | 65.9 | 53.0 | 24.50 | 8.04 |
| YOLOv11_n | 53.2 | 54.5 | 63.6 | 40.4 | 53.0 | 26.2 | 61.0 | 49.5 | 6.30 | 2.58 |
| YOLOv11_s | 56.6 | 57.5 | 65.3 | 47.9 | 56.8 | 28.2 | 62.4 | 54.2 | 21.30 | 9.41 |
| 本文算法 | 62.3 | 62.5 | 69.7 | 53.7 | 62.1 | 32.1 | 67.3 | 56.7 | 9.10 | 3.93 |

Fig. 12 Visualization comparison of YOLOv8_n algorithm and proposed algorithm
| 算法 | AP50 /% | P/% | R/% | mAP50 /% | mAP50:95 /% | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| LC | TC | AC | PH | OC | RP | |||||
| Baseline | 80.5 | 82.3 | 89.2 | 46.6 | 75.7 | 91.7 | 81.2 | 73.5 | 77.7 | 46.8 |
| 本文算法 | 86.8 | 85.3 | 93.3 | 57.5 | 82.2 | 92.1 | 88.2 | 74.8 | 82.9 | 52.7 |
Tab. 6 Experimental results on UAV-PDD2023 dataset
| 算法 | AP50 /% | P/% | R/% | mAP50 /% | mAP50:95 /% | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| LC | TC | AC | PH | OC | RP | |||||
| Baseline | 80.5 | 82.3 | 89.2 | 46.6 | 75.7 | 91.7 | 81.2 | 73.5 | 77.7 | 46.8 |
| 本文算法 | 86.8 | 85.3 | 93.3 | 57.5 | 82.2 | 92.1 | 88.2 | 74.8 | 82.9 | 52.7 |

Fig. 13 Visualization comparison of two algorithms on UAV-PDD2023 dataset
| [1] | WANG X, GIRSHICK R, GUPTA A, et al. Non-local neural networks[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 7794-7803. |
| [2] | YU G, ZHOU X. An improved YOLOv5 crack detection method combined with a bottleneck Transformer[J]. Mathematics, 2023, 11(10): No.2377. |
| [3] | XIANG X, WANG Z, QIAO Y. An improved YOLOv5 crack detection method combined with Transformer[J]. IEEE Sensors Journal, 2022, 22(14): 14328-14335. |
| [4] | WANG S, CAI B, WANG W, et al. Automated detection of pavement distress based on enhanced YOLOv8 and synthetic data with textured background modeling[J]. Transportation Geotechnics, 2024, 48: No.101304. |
| [5] | 任安虎,姜子渊,马晨浩. 基于改进YOLOv5s的道路裂缝检测算法[J]. 激光杂志, 2024, 45(4): 88-94. |
| REN A H, JIANG Z Y, MA C H. Road crack detection algorithm based on improved YOLOv5s[J]. Laser Journal, 2024, 45(4): 88-94. | |
| [6] | LIU Y, SHAO Z, HOFFMANN N. Global attention mechanism: retain information to enhance channel-spatial interactions[EB/OL]. [2024-10-11].. |
| [7] | ZENG J, ZHONG H. YOLOv8-PD: an improved road damage detection algorithm based on YOLOv8n model[J]. Scientific Reports, 2024, 14: No.12052. |
| [8] | 王海群,王炳楠,葛超. 重参数化YOLOv8路面病害检测算法[J]. 计算机工程与应用, 2024, 60(5): 191-199. |
| WANG H Q, WANG B N, GE C. Re-parameterized YOLOv8 pavement disease detection algorithm[J]. Computer Engineering and Applications, 2024, 60(5): 191-199. | |
| [9] | DING X, ZHANG X, MA N, et al. RepVGG: making VGG-style ConvNets great again[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 13728-13737. |
| [10] | DING X, ZHANG X, HAN J, et al. Diverse branch block: building a convolution as an inception-like unit[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 10881-10890. |
| [11] | LIU S, QI L, QIN H, et al. Path aggregation network for instance segmentation[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 8759-8768. |
| [12] | WANG X, GAO H, JIA Z, et al. BL-YOLOv8: an improved road defect detection model based on YOLOv8[J]. Sensors, 2023, 23(20): No.8361. |
| [13] | TAN M, PANG R, LE Q V. EfficientDet: scalable and efficient object detection[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 10778-10787. |
| [14] | DUAN K, BAI S, XIE L, et al. CenterNet: keypoint triplets for object detection[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 6568-6577. |
| [15] | TIAN Z, SHEN C, CHEN H, et al. FCOS: a simple and strong anchor-free object detector[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(4): 1922-1933. |
| [16] | ZHANG S, CHI C, YAO Y, et al. Bridging the gap between anchor-based and anchor-free detection via adaptive training sample selection[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 9756-9765. |
| [17] | FENG C, ZHONG Y, GAO Y, et al. TOOD: task-aligned one-stage object detection[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 3490-3499. |
| [18] | GE Z, LIU S, WANG F, et al. YOLOX: exceeding YOLO series in 2021[EB/OL]. [2024-10-11].. |
| [19] | LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 936-944. |
| [20] | ZHENG Z, WANG P, REN D, et al. Enhancing geometric factors in model learning and inference for object detection and instance segmentation[J]. IEEE Transactions on Cybernetics, 2022, 52(8): 8574-8586. |
| [21] | HAN K, WANG Y, TIAN Q, et al. GhostNet: more features from cheap operations[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 1577-1586. |
| [22] | LIU W, LU H, FU H, et al. Learning to upsample by learning to sample[C]// Proceedings of the 2023 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2023: 6004-6014. |
| [23] | SHI W, CABALLERO J, HUSZÁR F, et al. Real-time single image and video super-resolution using an efficient sub-pixel convolutional neural network[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 1874-1883. |
| [24] | WANG C Y, YEH I H, LIAO H Y M. YOLOv9: learning what you want to learn using programmable gradient information[C]// Proceedings of the 2024 European Conference on Computer Vision, LNCS 15089. Cham: Springer, 2025: 1-21. |
| [25] | GUO M H, LU C Z, HOU Q, et al. SegNeXt: rethinking convolutional attention design for semantic segmentation[C]// Proceedings of the 36th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2022: 1140-1156. |
| [26] | WU Y, HE K. Group normalization[C]// Proceedings of the 2018 European Conference on Computer Vision, LNCS 11217. Cham: Springer, 2018: 3-19. |
| [27] | TONG Z, CHEN Y, XU Z, et al. Wise-IoU: bounding box regression loss with dynamic focusing mechanism[EB/OL]. [2024-10-11].. |
| [28] | LIU C, WANG K, LI Q, et al. Powerful-IoU: more straightforward and faster bounding box regression loss with a nonmonotonic focusing mechanism[J]. Neural Networks, 2024, 170: 276-284. |
| [29] | ARYA D, MAEDA H, GHOSH S K, et al. RDD2022: a multi-national image dataset for automatic road damage detection[J]. Geoscience Data Journal, 2024,11: 846-862. |
| [30] | YAN H, ZHANG J. UAV-PDD2023: a benchmark dataset for pavement distress detection based on UAV images[J]. Data in Brief, 2023, 51: No.109692. |
| [31] | LAU K W, PO L M, REHMAN Y A U. Large separable kernel attention: rethinking the large kernel attention design in CNN[J]. Expert Systems with Applications, 2024, 236: No.121352. |
| [32] | XIA Z, PAN X, SONG S, et al. Vision Transformer with deformable attention[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 4784-4793. |
| [33] | FAN Q, HUANG H, GUAN J, et al. Rethinking local perception in lightweight vision Transformer[EB/OL]. [2024-10-11].. |
| [34] | SHI D. TransNeXt: robust foveal visual perception for vision Transformers[C]// Proceedings of the 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2024: 17773-17783. |
| [35] | REN S, HE K, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| [36] | ZHANG H, WANG Y, DAYOUB F, et al. VarifocalNet: an IoU-aware dense object detector[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 8510-8519. |
| [37] | WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 7464-7475. |
| [38] | WANG C, HE W, NIE Y, et al. Gold-YOLO: efficient object detector via gather-and-distribute mechanism[C]// Proceedings of the 37th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2023: 51094-51112. |
| [39] | ZHAO Y, LV W, XU S, et al. DETRs beat YOLOs on real-time object detection[C]// Proceedings of the 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2024: 16965-16974. |
| [40] | LIU Z, LIN Y, CAO Y, et al. Swin Transformer: hierarchical vision Transformer using shifted windows[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 9992-10002. |
| [41] | WANG A, CHEN H, LIU L, et al. YOLOv10: real-time end-to-end object detection[C]// Proceedings of the 38th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2024: 107984-108011. |
| [1] | Yiming LIANG, Jing FAN, Wenze CHAI. Multi-scale feature fusion sentiment classification based on bidirectional cross attention [J]. Journal of Computer Applications, 2025, 45(9): 2773-2782. |
| [2] | Chengzhi YAN, Ying CHEN, Kai ZHONG, Han GAO. 3D object detection algorithm based on multi-scale network and axial attention [J]. Journal of Computer Applications, 2025, 45(8): 2537-2545. |
| [3] | Liang CHEN, Xuan WANG, Kun LEI. Helmet wearing detection algorithm for complex scenarios based on cross-layer multi-scale feature fusion [J]. Journal of Computer Applications, 2025, 45(7): 2333-2341. |
| [4] | Danyang CHEN, Changlun ZHANG. Multi-scale decorrelation graph convolutional network model [J]. Journal of Computer Applications, 2025, 45(7): 2180-2187. |
| [5] | Xiang WANG, Qianqian CUI, Xiaoming ZHANG, Jianchao WANG, Zhenzhou WANG, Jialin SONG. Wireless capsule endoscopy image classification model based on improved ConvNeXt [J]. Journal of Computer Applications, 2025, 45(6): 2016-2024. |
| [6] | Yingtao CHEN, Kangkang FANG, Jin’ao ZHANG, Haoran LIANG, Huanbin GUO, Zhaowen QIU. Segmentation network of coronary artery structure from CT angiography images based on multi-scale spatial features [J]. Journal of Computer Applications, 2025, 45(6): 2007-2015. |
| [7] | Tiantong ZHOU, Yanqi ZHENG, Tao WEI, Yakang DAI, Ling ZOU. Cognitive load EEG recognition model integrating variational graph autoencoder and local-global graph network [J]. Journal of Computer Applications, 2025, 45(6): 1849-1857. |
| [8] | Kunyuan JIANG, Xiaoxia LI, Li WANG, Yaodan CAO, Xiaoqiang ZHANG, Nan DING, Yingyue ZHOU. Boundary-cross supervised semantic segmentation network with decoupled residual self-attention [J]. Journal of Computer Applications, 2025, 45(4): 1120-1129. |
| [9] | Shiyue GUO, Jianwu DANG, Yangping WANG, Jiu YONG. 3D hand pose estimation combining attention mechanism and multi-scale feature fusion [J]. Journal of Computer Applications, 2025, 45(4): 1293-1299. |
| [10] | Xinyao LINGHU, Yan CHEN, Pengcheng ZHANG, Yi LIU, Zhiguo GUI, Wei ZHAO, Zhanhao DONG. Cervical cell nucleus image segmentation based on multi-scale guided filtering [J]. Journal of Computer Applications, 2025, 45(4): 1333-1339. |
| [11] | Baohua YUAN, Jialu CHEN, Huan WANG. Medical image segmentation network integrating multi-scale semantics and parallel double-branch [J]. Journal of Computer Applications, 2025, 45(3): 988-995. |
| [12] | Zhongwei ZHANG, Jun WANG, Shudong LIU, Zhiheng WANG. Object detection in remote sensing image based on multi-scale feature fusion and weighted boxes fusion [J]. Journal of Computer Applications, 2025, 45(2): 633-639. |
| [13] | Zhonghua LI, Gengxin ZHONG, Ping FAN, Hengliang ZHU. Camouflaged object detection by boundary mining and background guidance [J]. Journal of Computer Applications, 2025, 45(10): 3328-3335. |
| [14] | Ziyi WANG, Weijun LI, Xueyang LIU, Jianping DING, Shixia LIU, Yilei SU. Image caption method based on Swin Transformer and multi-scale feature fusion [J]. Journal of Computer Applications, 2025, 45(10): 3154-3160. |
| [15] | Shang LIU, Yuwei ZHOU, Rao DAI, Linfang DONG, Meng LIU. Small target detection algorithm in remote sensing images integrating attention and contextual information [J]. Journal of Computer Applications, 2025, 45(1): 292-300. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||