


Journal of Computer Applications ›› 2023, Vol. 43 ›› Issue (8): 2537-2545.DOI: 10.11772/j.issn.1001-9081.2022070972
• Multimedia computing and computer simulation • Previous Articles Next Articles
Dongying ZHU1, Yong ZHONG2, Guanci YANG1,3,4( ), Yang LI3
), Yang LI3
Received:2022-07-06
Revised:2022-09-19
Accepted:2022-09-19
Online:2023-01-15
Published:2023-08-10
Contact:
Guanci YANG
About author:ZHU Dongying, born in 1996, M. S. candidate. His research interests include intelligent autonomous system.Supported by:通讯作者:
杨观赐
作者简介:朱东莹(1996—),男,浙江杭州人,硕士研究生,CCF会员,主要研究方向:自主智能系统基金资助:CLC Number:
Dongying ZHU, Yong ZHONG, Guanci YANG, Yang LI. Research progress on motion segmentation of visual localization and mapping in dynamic environment[J]. Journal of Computer Applications, 2023, 43(8): 2537-2545.
朱东莹, 钟勇, 杨观赐, 李杨. 动态环境下视觉定位与建图的运动分割研究进展[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2537-2545.
Add to citation manager EndNote|Ris|BibTeX
URL: http://www.joca.cn/EN/10.11772/j.issn.1001-9081.2022070972
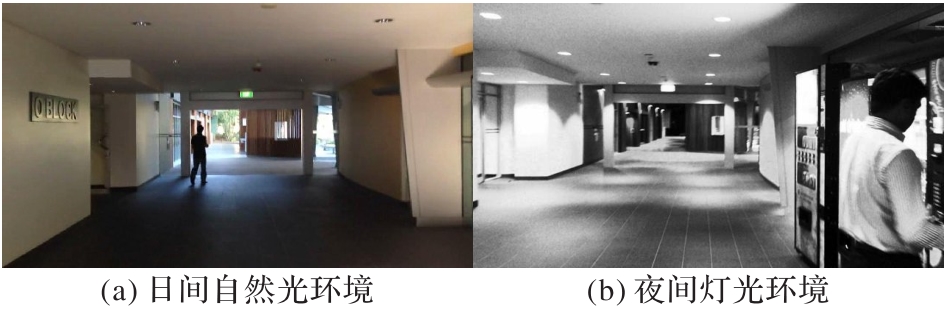
Fig. 1 Object movement and illumination change in dynamic environment
| 数据集 | 场景 | 采集方式 | 数据类型 | 动态物体 |
|---|---|---|---|---|
| TUM[ | 室内 | 手持/机器人 | RGB-D图像 | 人 |
| Bonn[ | 室内 | 手持 | RGB-D图像 | 人、物品 |
| OpenLORIS[ | 室内 | 机器人 | RGB-D图像、双目图像、2D/3D激光点云、IMU、轮式里程计 | 人、物品 |
| ADVIO[ | 室内/室外 | 手持 | 单目、IMU | 人、车、电梯 |
| KITTI[ | 室外道路 | 汽车 | 双目图像、激光点云、IMU | 行人、汽车 |
| Oxford[ | 室外道路 | 汽车 | 单/双目图像、激光点云、GPS/INS | 行人、汽车 |
Tab. 1 Commonly used visual SLAM datasets in dynamic environment
| 数据集 | 场景 | 采集方式 | 数据类型 | 动态物体 |
|---|---|---|---|---|
| TUM[ | 室内 | 手持/机器人 | RGB-D图像 | 人 |
| Bonn[ | 室内 | 手持 | RGB-D图像 | 人、物品 |
| OpenLORIS[ | 室内 | 机器人 | RGB-D图像、双目图像、2D/3D激光点云、IMU、轮式里程计 | 人、物品 |
| ADVIO[ | 室内/室外 | 手持 | 单目、IMU | 人、车、电梯 |
| KITTI[ | 室外道路 | 汽车 | 双目图像、激光点云、IMU | 行人、汽车 |
| Oxford[ | 室外道路 | 汽车 | 单/双目图像、激光点云、GPS/INS | 行人、汽车 |
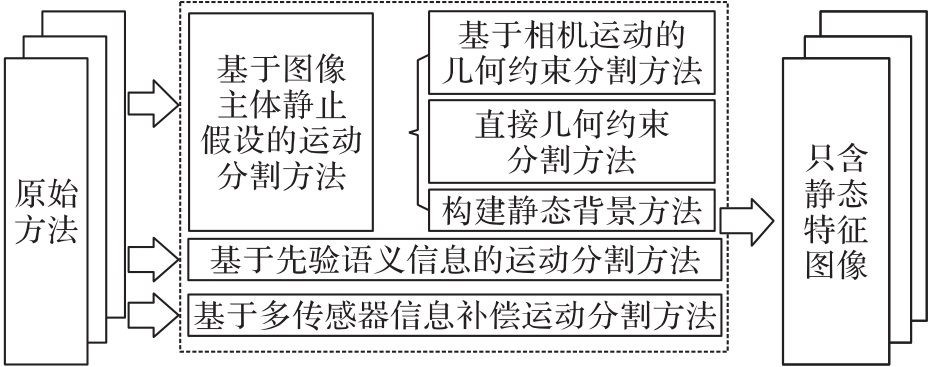
Fig. 2 Summary of dynamic feature screening methods
| 方法类别 | 环境 预设 | 传感器 安装要求 | 分割 精度 | 实时性 | 识别潜在运动物体 |
|---|---|---|---|---|---|
基于图像主体静止 假设的运动分割方法 | 环境 主体静止 | 低 | 低 | 中 | 否 |
| 基于先验语义信息的运动分割方法 | 先验 语义标注 | 低 | 高 | 较差 | 是 |
基于多传感器信息 补偿运动分割方法 | 无 | 高 | 中 | 好 | 否 |
Tab. 2 Performance comparison of three types of motion segmentation methods
| 方法类别 | 环境 预设 | 传感器 安装要求 | 分割 精度 | 实时性 | 识别潜在运动物体 |
|---|---|---|---|---|---|
基于图像主体静止 假设的运动分割方法 | 环境 主体静止 | 低 | 低 | 中 | 否 |
| 基于先验语义信息的运动分割方法 | 先验 语义标注 | 低 | 高 | 较差 | 是 |
基于多传感器信息 补偿运动分割方法 | 无 | 高 | 中 | 好 | 否 |
| 类别 | 优点 | 缺点 |
|---|---|---|
基于相机运动的 几何约束分割方法 | 精度较好 | 高动态 场景精度差 |
| 直接几何约束分割方法 | 计算量小 | 分割精度较差 |
| 构建静态背景方法 | 高动态场景精度较好 | 计算复杂 |
Tab. 3 Advantages and disadvantages of motion segmentation methods based on static assumption of image subject
| 类别 | 优点 | 缺点 |
|---|---|---|
基于相机运动的 几何约束分割方法 | 精度较好 | 高动态 场景精度差 |
| 直接几何约束分割方法 | 计算量小 | 分割精度较差 |
| 构建静态背景方法 | 高动态场景精度较好 | 计算复杂 |
| 方法 | 绝对轨迹均方根误差/m | 相机类型 | 运行环境 | 基础框架 | 单帧跟踪时间/ms |
|---|---|---|---|---|---|
| 文献[ | 0.037 1 | RGB-D | E3-1230+12 GB | 半直接法SLAM | 15 |
| 文献[ | 0.093 2 | RGB-D | i3+4 GB | DVO-SLAM | 500 |
| 文献[ | 0.035 4 | RGB-D | i5-4200H+8 GB | ORB-SLAM2 | 37 |
| 文献[ | 0.243 3 | RGB-D | i5+4 GB+GPU | 线特征里程计 | 50 |
| 文献[ | 0.310 3* | 双目 | i7-4720HQ+8 GB | ORB-SLAM | 114 |
| 文献[ | 0.079 9 | RGB-D | i7-6700+20 GB | ORB-SLAM2 | — |
| 文献[ | 0.036 0 | RGB-D | i7+16 GB | ORB-SLAM2 | 57 |
| 文献[ | 0.160 8 | RGB-D | i5-3470+8 GB | ORB-SLAM2 | 30 |
| 文献[ | 0.518 6 | RGB-D | i7+8 GB | DVO-SLAM | 43 |
| 文献[ | 0.065 7 | RGB-D | i7+16 GB | DVO-SLAM | 7 000 |
Tab. 4 Segmentation methods based on static assumption of image subject
| 方法 | 绝对轨迹均方根误差/m | 相机类型 | 运行环境 | 基础框架 | 单帧跟踪时间/ms |
|---|---|---|---|---|---|
| 文献[ | 0.037 1 | RGB-D | E3-1230+12 GB | 半直接法SLAM | 15 |
| 文献[ | 0.093 2 | RGB-D | i3+4 GB | DVO-SLAM | 500 |
| 文献[ | 0.035 4 | RGB-D | i5-4200H+8 GB | ORB-SLAM2 | 37 |
| 文献[ | 0.243 3 | RGB-D | i5+4 GB+GPU | 线特征里程计 | 50 |
| 文献[ | 0.310 3* | 双目 | i7-4720HQ+8 GB | ORB-SLAM | 114 |
| 文献[ | 0.079 9 | RGB-D | i7-6700+20 GB | ORB-SLAM2 | — |
| 文献[ | 0.036 0 | RGB-D | i7+16 GB | ORB-SLAM2 | 57 |
| 文献[ | 0.160 8 | RGB-D | i5-3470+8 GB | ORB-SLAM2 | 30 |
| 文献[ | 0.518 6 | RGB-D | i7+8 GB | DVO-SLAM | 43 |
| 文献[ | 0.065 7 | RGB-D | i7+16 GB | DVO-SLAM | 7 000 |
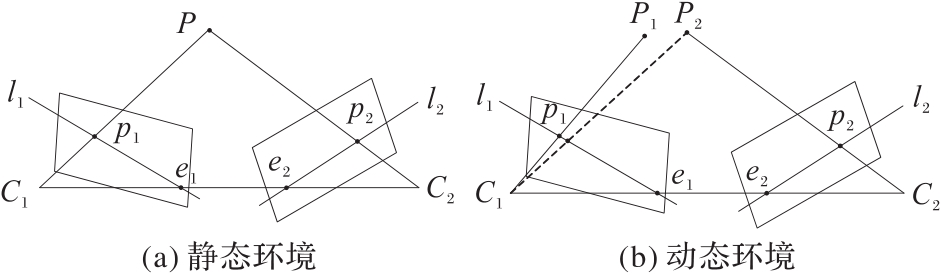
Fig. 3 Epipolar constraint in static environment and dynamic environment

Fig. 4 Motion segmentation method based on constraint relationship between feature points
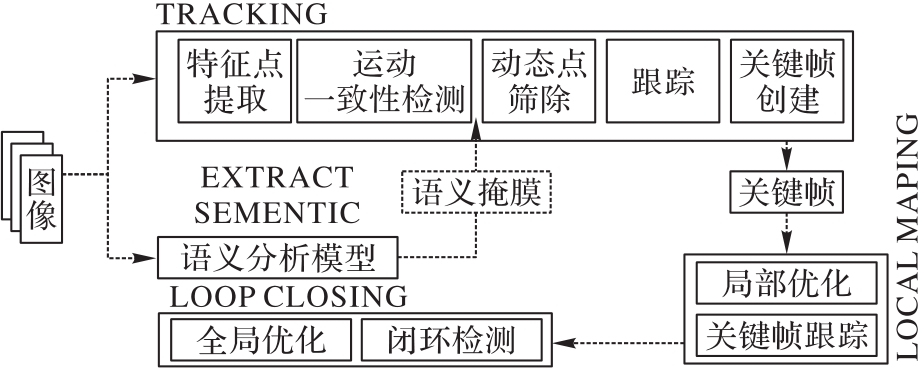
Fig. 5 Dynamic SLAM motion segmentation framework with semantic enhancement
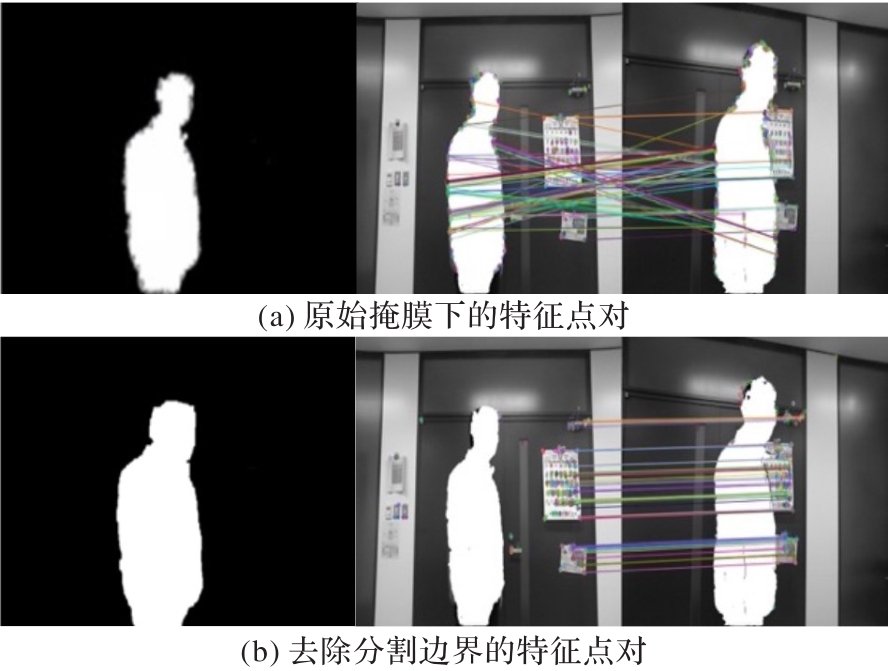
Fig. 6 Elimination of false matching of segmentation boundary
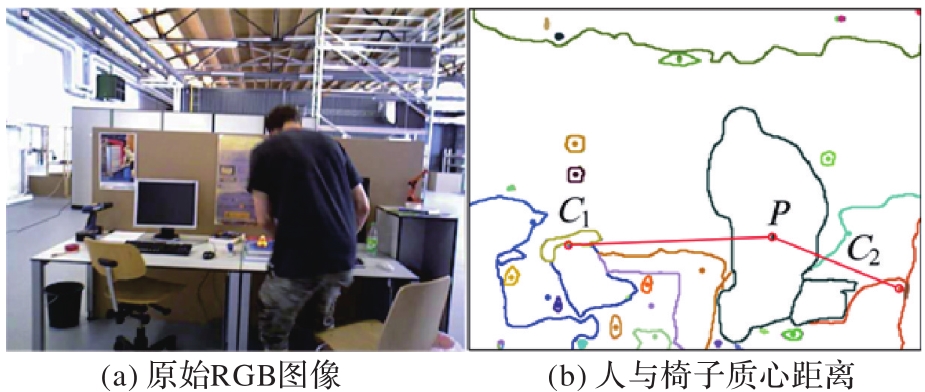
Fig. 7 Detection of potential moving objects based on semantic information
| 方法 | 语义帧选择 | 运动分割方法 | 相机类型 | 年份 | 运行环境 | 单帧跟踪时间/ms |
|---|---|---|---|---|---|---|
| DS-SLAM[ | 每帧 | SegNet | RGB-D | 2018 | i7+P4000 | 59 |
| DynaSLAM[ | 每帧 | Mask R-CNN+几何约束 | 单、双目及RGB-D | 2018 | Tesla M40 | 700 |
| Dynamic-SLAM[ | 每帧 | SSD | 单目 | 2019 | i5-7300HQ+GTX1050Ti | 100 |
| SDF-SLAM[ | 仅初始化 | SegNet+静态背景 | RGB-D | 2020 | i9-9940X+TITAN RTX | — |
| DDL-SLAM[ | 每帧 | DUNet | RGB-D | 2020 | i7+NVIDIA TITAN | 非实时 |
| Fan等[ | 每帧 | BlitzNet | RGB-D | 2020 | — | — |
| Miao等[ | 每帧 | PWC-Net+Deeplabv3 | RGB-D | 2021 | — | — |
| RS-SLAM[ | 每帧 | PSPNet | RGB-D | 2021 | i5-7500+GTX 1060 | 180 |
| YOLO-SLAM[ | 每帧 | YOLO | RGB-D | 2021 | i5-4288U | 696 |
| OC-SLAM[ | 每帧 | YOLO-Fastest+几何约束 | RGB-D | 2021 | — | — |
| Detect-SLAM[ | ORB-SLAM关键帧 | SSD+运动概率传播 | RGB-D | 2018 | i7-4700+ GTX960M | 实时 |
| Zhang等[ | ORB-SLAM关键帧 | Tiny YOLO | RGB-D | 2018 | GT730 | 20(仅YOLO) |
| Wen等[ | 每5个ORB-SLAM关键帧 | Mask R-CNN+三项误差 | RGB-D | 2021 | — | 非实时 |
| DE-SLAM[ | ORB-SLAM关键帧 | MobileNet V2 | RGB-D | 2022 | i5 | 37 |
| DGS-SLAM[ | 独立的语义帧选择策略 | YOLACT++ | RGB-D | 2022 | AMD 5900HX+ GTX3070 | 38 |
| RDS-SLAM[ | 首尾关键帧优先策略 | Mask R-CNN, SegNet运动概率 | RGB-D | 2021 | RTX 2080Ti | 30 |
| RDMO-SLAM[ | 首尾关键帧优先策略 | Mask R-CNN+光流 | RGB-D | 2021 | RTX 2080Ti | 22~35 |
Tab. 5 Dynamic SLAM motion segmentation methods based on semantic information
| 方法 | 语义帧选择 | 运动分割方法 | 相机类型 | 年份 | 运行环境 | 单帧跟踪时间/ms |
|---|---|---|---|---|---|---|
| DS-SLAM[ | 每帧 | SegNet | RGB-D | 2018 | i7+P4000 | 59 |
| DynaSLAM[ | 每帧 | Mask R-CNN+几何约束 | 单、双目及RGB-D | 2018 | Tesla M40 | 700 |
| Dynamic-SLAM[ | 每帧 | SSD | 单目 | 2019 | i5-7300HQ+GTX1050Ti | 100 |
| SDF-SLAM[ | 仅初始化 | SegNet+静态背景 | RGB-D | 2020 | i9-9940X+TITAN RTX | — |
| DDL-SLAM[ | 每帧 | DUNet | RGB-D | 2020 | i7+NVIDIA TITAN | 非实时 |
| Fan等[ | 每帧 | BlitzNet | RGB-D | 2020 | — | — |
| Miao等[ | 每帧 | PWC-Net+Deeplabv3 | RGB-D | 2021 | — | — |
| RS-SLAM[ | 每帧 | PSPNet | RGB-D | 2021 | i5-7500+GTX 1060 | 180 |
| YOLO-SLAM[ | 每帧 | YOLO | RGB-D | 2021 | i5-4288U | 696 |
| OC-SLAM[ | 每帧 | YOLO-Fastest+几何约束 | RGB-D | 2021 | — | — |
| Detect-SLAM[ | ORB-SLAM关键帧 | SSD+运动概率传播 | RGB-D | 2018 | i7-4700+ GTX960M | 实时 |
| Zhang等[ | ORB-SLAM关键帧 | Tiny YOLO | RGB-D | 2018 | GT730 | 20(仅YOLO) |
| Wen等[ | 每5个ORB-SLAM关键帧 | Mask R-CNN+三项误差 | RGB-D | 2021 | — | 非实时 |
| DE-SLAM[ | ORB-SLAM关键帧 | MobileNet V2 | RGB-D | 2022 | i5 | 37 |
| DGS-SLAM[ | 独立的语义帧选择策略 | YOLACT++ | RGB-D | 2022 | AMD 5900HX+ GTX3070 | 38 |
| RDS-SLAM[ | 首尾关键帧优先策略 | Mask R-CNN, SegNet运动概率 | RGB-D | 2021 | RTX 2080Ti | 30 |
| RDMO-SLAM[ | 首尾关键帧优先策略 | Mask R-CNN+光流 | RGB-D | 2021 | RTX 2080Ti | 22~35 |
| 方法 | 绝对轨迹均方根误差/m | 传感器 | 分割方法 | 运行环境 | 单帧跟踪时间/ms |
|---|---|---|---|---|---|
| 文献[ | 1.814 0* | 单目+IMU | 相机位姿估计后运动分割 | i7-7700HQ+16 GB | — |
| DRE-SLAM[ | 0.017 1 | RGB-D+轮式里程计 | 相机位姿估计后运动分割 | i7-8700+16 GB | 33±12 |
| AcousticFusion[ | 0.127 6 | RGB-D+麦克风阵列 | 依据声源方向直接判断动态区域 | i7-10875H +64 GB | 71 |
Tab. 6 Dynamic SLAM motion segmentation methods based on multi-sensor information compensation
| 方法 | 绝对轨迹均方根误差/m | 传感器 | 分割方法 | 运行环境 | 单帧跟踪时间/ms |
|---|---|---|---|---|---|
| 文献[ | 1.814 0* | 单目+IMU | 相机位姿估计后运动分割 | i7-7700HQ+16 GB | — |
| DRE-SLAM[ | 0.017 1 | RGB-D+轮式里程计 | 相机位姿估计后运动分割 | i7-8700+16 GB | 33±12 |
| AcousticFusion[ | 0.127 6 | RGB-D+麦克风阵列 | 依据声源方向直接判断动态区域 | i7-10875H +64 GB | 71 |
| 1 | 孙长银,吴国政,王志衡,等. 自动化学科面临的挑战[J]. 自动化学报, 2021, 47(2): 464-474. 10.16383/j.aas.c200904 |
| SUN C Y, WU G Z, WANG Z H, et.al. On challenges in automation science and technology[J]. Acta Automatica Sinica, 2021, 47(2): 464-474. 10.16383/j.aas.c200904 | |
| 2 | 陈虹宇,艾红,王晓,等. 社会交通中的社会信号分析与感知[J]. 自动化学报, 2021, 47(6): 1256-1272. 10.16383/j.aas.c200055 |
| CHEN H Y, AI H, WANG X, et al. Analysis and perception of social signals in social transportation[J]. Acta Automatica Sinica, 2021,47(6):1256-1272. 10.16383/j.aas.c200055 | |
| 3 | FUENTES-PACHECO J, RUIZ-ASCENCIO J, RENDÓN-MANCHA J M. Visual simultaneous localization and mapping: a survey[J]. Artificial Intelligence Review, 2015, 43(1): 55-81. 10.1007/s10462-012-9365-8 |
| 4 | 杨观赐,王霄远,蒋亚汶,等. 视觉与惯性传感器融合的SLAM技术综述[J]. 贵州大学学报(自然科学版), 2020, 37(6): 1-12. 10.15958/j.cnki.gdxbzrb.2020.06.01 |
| YANG G C, WANG X Y, JIANG Y W, et al. Review of SLAM technologies based on visual and inertial sensor fusion[J]. Journal of Guizhou University (Natural Sciences), 2020, 37(6): 1-12. 10.15958/j.cnki.gdxbzrb.2020.06.01 | |
| 5 | YANG G C, CHEN Z J, LI Y, et al. Rapid relocation method for mobile robot based on improved ORB-SLAM2 algorithm[J]. Remote Sensing, 2019, 11(2): No.149. 10.3390/rs11020149 |
| 6 | 李云天,穆荣军,单永志. 无人系统视觉SLAM技术发展现状简析[J]. 控制与决策, 2021, 36(3): 513-522. 10.13195/j.kzyjc.2019.1149 |
| LI Y T, MU R J, SHAN Y Z, et al. A survey of visual SLAM in unmanned systems[J]. Control and Decision, 2021, 36(3): 513-522. 10.13195/j.kzyjc.2019.1149 | |
| 7 | ELVIRA R, TARDÓS J D, MONTIEL J M M. ORBSLAM-Atlas: a robust and accurate multi-map system[C]// Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2019: 6253-6259. 10.1109/iros40897.2019.8967572 |
| 8 | 曹风魁,庄严,闫飞,等. 移动机器人长期自主环境适应研究进展和展望[J]. 自动化学报, 2020, 46(2): 205-221. |
| CAO F K, ZHUANG Y, YAN F, et al. Long-term autonomous environment adaptation of mobile robots: state-of-the-art methods and prospects[J]. Acta Automatica Sinica, 2020, 46(2): 205-221. | |
| 9 | 徐晓苏,安仲帅. 基于深度学习的室内动态场景下的VSLAM方法[J]. 中国惯性技术学报, 2020, 28(4): 480-486. 10.13695/j.cnki.12-1222/o3.2020.04.010 |
| XU X S, AN Z S. Vision SLAM method in indoor dynamic scene based on deep learning[J]. Journal of Chinese Inertial Technology, 2020, 28(4): 480-486. 10.13695/j.cnki.12-1222/o3.2020.04.010 | |
| 10 | 刘强,段富海,桑勇,等. 复杂环境下视觉SLAM闭环检测方法综述[J]. 机器人, 2019, 41(1): 112-123. 10.13973/j.cnki.robot.180004 |
| LIU Q, DUAN F H, SANG Y, et al. A survey of loop-closure detection method of visual SLAM in complex environments[J]. Robot, 2019, 41(1): 112-123. 10.13973/j.cnki.robot.180004 | |
| 11 | 王忠立,李文仪. 基于点云分割的运动目标跟踪与SLAM方法[J]. 机器人, 2021, 43(2): 177-192. |
| WANG Z L, LI W Y. Moving objects tracking and SLAM method based on point cloud segmentation[J]. Robot, 2021, 43(2): 177-192. | |
| 12 | 王柯赛,姚锡凡,黄宇,等. 动态环境下的视觉SLAM研究评述[J]. 机器人, 2021, 43(6): 715-732. 10.13973/j.cnki.robot.200468 |
| WANG K S, YAO X F, HUANG Y, et al. Review of visual SLAM in dynamic environment[J]. Robot, 2021, 43(6): 715-732. 10.13973/j.cnki.robot.200468 | |
| 13 | 兰凤崇,李继文,陈吉清. 面向动态场景复合深度学习与并行计算的DG-SLAM算法[J]. 吉林大学学报(工学版), 2021, 51(4): 1437-1446. |
| LAN F C, LI J W, CHEN J Q. DG-SLAM algorithm for dynamic scene compound deep learning and parallel computing[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(4): 1437-1446. | |
| 14 | STURM J, ENGELHARD N, ENDRES F, et al. A benchmark for the evaluation of RGB-D SLAM systems[C]// Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2012: 573-580. 10.1109/iros.2012.6385773 |
| 15 | PALAZZOLO E, BEHLEY J, LOTTES P, et al. ReFusion: 3D reconstruction in dynamic environments for RGB-D cameras exploiting residuals[C]// Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2019: 7855-7862. 10.1109/iros40897.2019.8967590 |
| 16 | SHI X S, LI D J, ZHAO P P, et al. Are we ready for service robots? the OpenLORIS-Scene datasets for lifelong SLAM[C]// Proceedings of the 2020 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2020: 3139-3145. 10.1109/icra40945.2020.9196638 |
| 17 | CORTÉS S, SOLIN A, RAHTU E, et al. ADVIO: an authentic dataset for visual-inertial odometry[C]// Proceedings of the 2018 European Conference on Computer Vision, LNCS 11214. Cham: Springer, 2018: 425-440. |
| 18 | GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving? the KITTI vision benchmark suite[C]// Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2012: 3354-3361. 10.1109/cvpr.2012.6248074 |
| 19 | MADDERN W, PASCOE G, LINEGAR C, et al. 1 year, 1000 km: the Oxford RobotCar dataset[J]. The International Journal of Robotics Research, 2017, 36(1): 3-15. 10.1177/0278364916679498 |
| 20 | 李帅鑫,李广云,王力,等. LiDAR/IMU紧耦合的实时定位方法[J]. 自动化学报, 2021, 47(6): 1377-1389. 10.16383/j.aas.c190424 |
| LI S X, LI G Y, WANG L, et al. LiDAR/IMU tightly coupled real-time localization method[J]. Acta Automatica Sinica, 2021, 47(6): 1377-1389. 10.16383/j.aas.c190424 | |
| 21 | 俞毓锋,赵卉菁. 基于相机与摇摆激光雷达融合的非结构化环境定位[J]. 自动化学报, 2019, 45(9): 1791-1798. |
| YU Y F, ZHAO H J. Off-road localization using monocular camera and nodding LiDAR[J]. Acta Automatica Sinica, 2019, 45(9): 1791-1798. | |
| 22 | 王硕,祝海江,李和平,等. 基于共面圆的距离传感器与相机的相对位姿标定[J]. 自动化学报, 2020, 46(6): 1154-1165. |
| WANG S, ZHU H J, LI H P, et al. Relative pose calibration between a range sensor and a camera using two coplanar circles[J]. Acta Automatica Sinica, 2020, 46(6): 1154-1165. | |
| 23 | 艾青林,刘刚江,徐巧宁. 动态环境下基于改进几何与运动约束的机器人RGB-D SLAM算法[J]. 机器人, 2021, 43(2): 167-176. |
| AI Q L, LIU G J, XU Q N. An RGB-D SLAM algorithm for robot based on the improved geometric and motion constraints in dynamic environment[J]. Robot, 2021, 43(2): 167-176. | |
| 24 | 高成强,张云洲,王晓哲,等. 面向室内动态环境的半直接法RGB-D SLAM算法[J]. 机器人, 2019, 41(3): 372-383. |
| GAO C Q, ZHANG Y Z, WANG X Z, et al. Semi-direct RGB-D SLAM algorithm for dynamic indoor environments[J]. Robot, 2019, 41(3): 372-383. | |
| 25 | SUN Y X, LIU M, MENG M Q H. Improving RGB-D SLAM in dynamic environments: a motion removal approach[J]. Robotics and Autonomous Systems, 2017, 89: 110-122. 10.1016/j.robot.2016.11.012 |
| 26 | 张慧娟,方灶军,杨桂林. 动态环境下基于线特征的RGB-D视觉里程计[J]. 机器人, 2019, 41(1): 75-82. |
| ZHANG H J, FANG Z J, YANG G L. RGB-D visual odometry in dynamic environments using line features[J]. Robot, 2019, 41(1): 75-82. | |
| 27 | 魏彤,李绪. 动态环境下基于动态区域剔除的双目视觉SLAM算法[J]. 机器人, 2020, 42(3): 336-345. |
| WEI T, LI X. Binocular vision SLAM algorithm based on dynamic region elimination in dynamic environment[J]. Robot, 2020, 42(3): 336-345. | |
| 28 | 杨世强,范国豪,白乐乐,等. 基于几何约束的室内动态环境视觉SLAM[J]. 计算机工程与应用, 2021, 57(16): 203-212. |
| YANG S Q, FAN G H, BAI L L, et al. Geometric constraint-based visual SLAM under dynamic indoor environment[J]. Computer Engineering and Applications, 2021, 57(16): 203-212. | |
| 29 | WEI H Y, ZHANG T, ZHANG L. GMSK-SLAM: a new RGB-D SLAM method with dynamic areas detection towards dynamic environments[J]. Multimedia Tools and Applications, 2021, 80(21/22/23): 31729-31751. 10.1007/s11042-021-11168-5 |
| 30 | DAI W C, ZHANG Y, LI P, et al. RGB-D SLAM in dynamic environments using point correlations[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(1): 373-389. 10.1109/tpami.2020.3010942 |
| 31 | KIM D H, KIM J H. Effective background model-based RGB-D dense visual odometry in a dynamic environment[J]. IEEE Transactions on Robotics, 2016, 32(6): 1565-1573. 10.1109/tro.2016.2609395 |
| 32 | SUN Y X, LIU M, MENG M Q H. Motion removal for reliable RGB-D SLAM in dynamic environments[J]. Robotics and Autonomous Systems, 2018, 108: 115-128. 10.1016/j.robot.2018.07.002 |
| 33 | 张岩,孙世宇,胡永江,等. 基于特征距离与内点的随机抽样一致性算法[J]. 电子与信息学报, 2018, 40(4): 928-935. 10.11999/JEIT170703 |
| ZHANG Y, SUN S Y, HU Y J, et al. Random sample consensus algorithm based on feature distance and inliers[J]. Journal of Electronics and Information Technology, 2018, 40(4): 928-935. 10.11999/JEIT170703 | |
| 34 | ALCANTARILLA P F, YEBES J J, ALMAZÁN J, et al. On combining visual SLAM and dense scene flow to increase the robustness of localization and mapping in dynamic environments[C]// Proceedings of the 2012 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2012: 1290-1297. 10.1109/icra.2012.6224690 |
| 35 | BARBER C B, DOBKIN D P, HUHDANPAA H. The Quickhull algorithm for convex hulls[J]. ACM Transactions on Mathematical Software, 1996, 22(4): 469-483. 10.1145/235815.235821 |
| 36 | CUI L Y, MA C W. SDF-SLAM: semantic depth filter SLAM for dynamic environments[J]. IEEE Access, 2020, 8: 95301-95311. 10.1109/access.2020.2994348 |
| 37 | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 779-788. 10.1109/cvpr.2016.91 |
| 38 | BADRINARAYANAN V, KENDALL A, CIPOLLA R. SegNet: a deep convolutional encoder-decoder architecture for image segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(12): 2481-2495. 10.1109/tpami.2016.2644615 |
| 39 | HE K M, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN[C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017: 2980-2988. 10.1109/iccv.2017.322 |
| 40 | YU C, LIU Z X, LIU X J, et al. DS-SLAM: a semantic visual SLAM towards dynamic environments[C]// Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2018: 1168-1174. 10.1109/iros.2018.8593691 |
| 41 | BESCOS B, FÁCIL J M, CIVERA J, et al. DynaSLAM: tracking, mapping, and inpainting in dynamic scenes[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 4076-4083. 10.1109/lra.2018.2860039 |
| 42 | XIAO L H, WANG J G, QIU X S, et al. Dynamic-SLAM: semantic monocular visual localization and mapping based on deep learning in dynamic environment[J]. Robotics and Autonomous Systems, 2019, 117: 1-16. 10.1016/j.robot.2019.03.012 |
| 43 | SUN L Y, KANEHIRO F, KUMAGAI I, et al. Multi-purpose SLAM framework for dynamic environment[C]// Proceedings of the 2020 IEEE/SICE International Symposium on System Integration. Piscataway: IEEE, 2020: 519-524. 10.1109/sii46433.2020.9026299 |
| 44 | FAN Y C, ZHANG Q C, LIU S F, et al. Semantic SLAM with more accurate point cloud map in dynamic environments[J]. IEEE Access, 2020, 8: 112237-112252. 10.1109/access.2020.3003160 |
| 45 | ZHAO X, ZUO T, HU X Y. OFM-SLAM: a visual semantic SLAM for dynamic indoor environments[J]. Mathematical Problems in Engineering, 2021, 2021: No.5538840. 10.1155/2021/5538840 |
| 46 | FAN Y C, ZHANG Q C, TANG Y L, et al. Blitz-SLAM: a semantic SLAM in dynamic environments[J]. Pattern Recognition, 2022, 121: No.108225. 10.1016/j.patcog.2021.108225 |
| 47 | MIAO S, LIU X X, WEI D Z, et al. A visual SLAM robust against dynamic objects based on hybrid semantic-geometry information[J]. ISPRS International Journal of Geo-Information, 2021, 10(10): No.673. 10.3390/ijgi10100673 |
| 48 | AI Y B, RUI T, LU M, et al. DDL-SLAM: a robust RGB-D SLAM in dynamic environments combined with deep learning[J]. IEEE Access, 2020, 8: 162335-162342. 10.1109/access.2020.2991441 |
| 49 | RAN T, YUAN L, ZHANG J B, et al. RS-SLAM: a robust semantic SLAM in dynamic environments based on RGB-D sensor[J]. IEEE Sensors Journal, 2021, 21(18): 20657-20664. 10.1109/jsen.2021.3099511 |
| 50 | WU W X, GUO L, GAO H L, et al. YOLO-SLAM: a semantic SLAM system towards dynamic environment with geometric constraint[J]. Neural Computing and Applications, 2022, 34(8): 6011-6026. 10.1007/s00521-021-06764-3 |
| 51 | WU Z Y, DENG X Y, LI S M, et al. OC-SLAM: steadily tracking and mapping in dynamic environments[J]. Frontiers in Energy Research, 2021, 9: No.803631. 10.3389/fenrg.2021.803631 |
| 52 | ZHONG F W, WANG S, ZHANG Z Q, et al. Detect-SLAM: making object detection and SLAM mutually beneficial[C]// Proceedings of the 2018 IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE, 2018: 1001-1010. 10.1109/wacv.2018.00115 |
| 53 | ZHANG L, WEI L Q, SHEN P Y, et al. Semantic SLAM based on object detection and improved Octomap[J]. IEEE Access, 2018, 6: 75545-75559. 10.1109/access.2018.2873617 |
| 54 | WEN S H, LI P J, ZHAO Y J, et al. Semantic visual SLAM in dynamic environment[J]. Autonomous Robots, 2021, 45(4): 493-504. |
| 55 | XING Z W, ZHU X R, DONG D C. DE-SLAM: SLAM for highly dynamic environment[J]. Journal of Field Robotics, 2022, 39(5): 528-542. 10.1002/rob.22062 |
| 56 | SANDLER M, HOWARD A, ZHU M L, et al. MobileNetV2: inverted residuals and linear bottlenecks[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 4510-4520. 10.1109/cvpr.2018.00474 |
| 57 | YAN L, HU X, ZHAO L, et al. DGS-SLAM: a fast and robust RGBD SLAM in dynamic environments combined by geometric and semantic information[J]. Remote Sensing, 2022, 14(3): 795-819. 10.3390/rs14030795 |
| 58 | LIU Y B, MIURA J. RDS-SLAM: real-time dynamic SLAM using semantic segmentation methods[J]. IEEE Access, 2021, 9: 23772-23785. 10.1109/access.2021.3050617 |
| 59 | CAMPOS C, ELVIRA R, GÓMEZ RODRÍGUEZ J J, et al. ORB-SLAM3: an accurate open-source library for visual, visual-inertial, and multimap SLAM[J]. IEEE Transactions on Robotics, 2021, 37(6): 1874-1890. 10.1109/tro.2021.3075644 |
| 60 | LIU Y B, MIURA J. RDMO-SLAM: real-time visual SLAM for dynamic environments using semantic label prediction with optical flow[J]. IEEE Access, 2021, 9: 106981-106997. 10.1109/access.2021.3100426 |
| 61 | FU D, XIA H, QIAO Y Y. Monocular visual-inertial navigation for dynamic environment[J]. Remote Sensing, 2021, 13(9): No.1610. 10.3390/rs13091610 |
| 62 | YAO E L, ZHANG H X, SONG H T, et al. Fast and robust visual odometry with a low-cost IMU in dynamic environments[J]. Industrial Robot, 2019, 46(6): 882-894. 10.1108/ir-01-2019-0001 |
| 63 | KIM D H, HAN S B, KIM J H. Visual odometry algorithm using an RGB-D sensor and IMU in a highly dynamic environment[M]// KIM J H, YANG W M, JO J, et al. Robot Intelligence Technology and Applications 3: Results from the 3th International Conference on Robot Intelligence Technology and Applications, AISC 345. Cham: Springer, 2015: 11-26. 10.1007/978-3-319-16841-8_2 |
| 64 | BLOESCH M, OMARI S, HUTTER M, et al. Robust visual inertial odometry using a direct EKF-based approach[C]// Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2015: 298-304. 10.1109/iros.2015.7353389 |
| 65 | NAM D V, GON-WOO K. Robust stereo visual inertial navigation system based on multi-stage outlier removal in dynamic environments[J]. Sensors, 2020, 20(10): No.2922. 10.3390/s20102922 |
| 66 | YANG D S, BI S S, WANG W, et al. DRE-SLAM: dynamic RGB-D encoder SLAM for a differential-drive robot[J]. Remote Sensing, 2019, 11(4): No.380. 10.3390/rs11040380 |
| 67 | 葛振华,王纪凯,王鹏,等. 室内环境SLAM过程中动态目标的检测与消除[C]// 第18届中国系统仿真技术及其应用学术年会论文集. 合肥:中国科学技术大学出版社, 2017: 259-265. |
| GE Z H, WANG J K, WANG P, et al. Detection and removal of moving objects in indoor environment SLAM[C]// Proceedings of the 18th CCSSTA. Hefei: University of Science and Technology of China Press, 2017: 259-265. | |
| 68 | ZHANG T W, ZHANG H Y, LI X F, et al. AcousticFusion: fusing sound source localization to visual SLAM in dynamic environments[C]// Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2021: 6868-6875. 10.1109/iros51168.2021.9636585 |
| 69 | YUAN Z A, XU K, ZHOU X Y, et al. SVG-Loop: semantic-visual-geometric information-based loop closure detection[J]. Remote Sensing, 2021, 13(17): No.3520. 10.3390/rs13173520 |
| 70 | HU M Y, LI S, WU J Y, et al. Loop closure detection for visual SLAM fusing semantic information[C]// Proceedings of the 38th Chinese Control Conference. Piscataway: IEEE, 2019: 4136-4141. 10.23919/chicc.2019.8866283 |
| [1] | Tianzouzi XIAO, Xiaobo ZHOU, Xin LUO, Qipeng TANG. Robust RGB-D SLAM system incorporating instance segmentation and clustering in dynamic environment [J]. Journal of Computer Applications, 2023, 43(4): 1220-1225. |
| [2] | Yongdi LI, Caihong LI, Yaoyu ZHANG, Guosheng ZHANG. Mobile robot path planning based on improved SAC algorithm [J]. Journal of Computer Applications, 2023, 43(2): 654-660. |
| [3] | Bingqi SHEN, Zhiming ZHANG, Shaolong SHU. UWB-VIO integrated indoor positioning algorithm for mobile robots [J]. Journal of Computer Applications, 2022, 42(12): 3924-3930. |
| [4] | LI Kairong, LIU Shuang, HU Qianqian, TANG Yiyuan. Improved ant colony optimization algorithm for path planning based on turning angle constraint [J]. Journal of Computer Applications, 2021, 41(9): 2560-2568. |
| [5] | LU Guoqing, SUN Hao. Two-dimensional mapping of swarm robot based on random walk [J]. Journal of Computer Applications, 2021, 41(7): 2121-2127. |
| [6] | LUAN Jianing, ZHANG Wei, SUN Wei, ZHANG Ao, HAN Dong. High-accuracy localization algorithm based on fusion of two-dimensional code vision and laser lidar [J]. Journal of Computer Applications, 2021, 41(5): 1484-1491. |
| [7] | Erchao LI, Kuankuan QI. Robot path planning based on B-spline curve and ant colony algorithm [J]. Journal of Computer Applications, 2021, 41(12): 3558-3564. |
| [8] | ZHENG Sicheng, KONG Linghua, YOU Tongfei, YI Dingrong. Semantic SLAM algorithm based on deep learning in dynamic environment [J]. Journal of Computer Applications, 2021, 41(10): 2945-2951. |
| [9] | LIU Ang, JIANG Jin, XU Kefeng. Robot path planning based on improved ant colony and pigeon inspired optimization algorithm [J]. Journal of Computer Applications, 2020, 40(11): 3366-3372. |
| [10] | WANG Kun, ZENG Guohui, LU Dunke, HUANG Bo, LI Xiaobin. Path planning of mobile robot based on improved asymptotically-optimal bidirectional rapidly-exploring random tree algorithm [J]. Journal of Computer Applications, 2019, 39(5): 1312-1317. |
| [11] | CHEN Ruonan, WEN Congcong, PENG Ling, YOU Chengzeng. Application of improved A* algorithm in indoor path planning for mobile robot [J]. Journal of Computer Applications, 2019, 39(4): 1006-1011. |
| [12] | HUANG Chao, LIANG Shengtao, ZHANG Yi, ZHANG Jie. Path planning of mobile robot based on multi-objective grasshopper optimization algorithm [J]. Journal of Computer Applications, 2019, 39(10): 2859-2864. |
| [13] | LUO Rui, SHI Wuxi, LI Baoquan. Active disturbance rejection control for mobile robot with skidding and slipping [J]. Journal of Computer Applications, 2018, 38(5): 1517-1522. |
| [14] | WANG Wei, PEI Dong, FENG Zhang. The shortest path planning for mobile robots using improved A* algorithm [J]. Journal of Computer Applications, 2018, 38(5): 1523-1526. |
| [15] | ZHANG Tao, MA Lei, MEI Lingyu. Indoor positioning method of warehouse mobile robot based on monocular vision [J]. Journal of Computer Applications, 2017, 37(9): 2491-2495. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||