


Journal of Computer Applications ›› 2023, Vol. 43 ›› Issue (12): 3848-3855.DOI: 10.11772/j.issn.1001-9081.2022121923
Special Issue: 先进计算
• Advanced computing • Previous Articles Next Articles
Received:2023-01-04
Revised:2023-03-21
Accepted:2023-03-22
Online:2023-04-12
Published:2023-12-10
Contact:
Hairong XUE
About author:HAN Xiaolong, born in 1978, Ph. D., associate professor. His research interests include logistics and supply chain management.
薛海蓉( ), 韩晓龙
), 韩晓龙
通讯作者:
薛海蓉
作者简介:韩晓龙(1978—),男,山东潍坊人,副教授,博士,主要研究方向:物流与供应链管理。
CLC Number:
Hairong XUE, Xiaolong HAN. Integrated scheduling considering automated guided vehicle charging strategy based on improved NSGA-Ⅱ[J]. Journal of Computer Applications, 2023, 43(12): 3848-3855.
薛海蓉, 韩晓龙. 基于改进NSGA-Ⅱ的考虑自动引导车充电策略的集成调度[J]. 《计算机应用》唯一官方网站, 2023, 43(12): 3848-3855.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2022121923
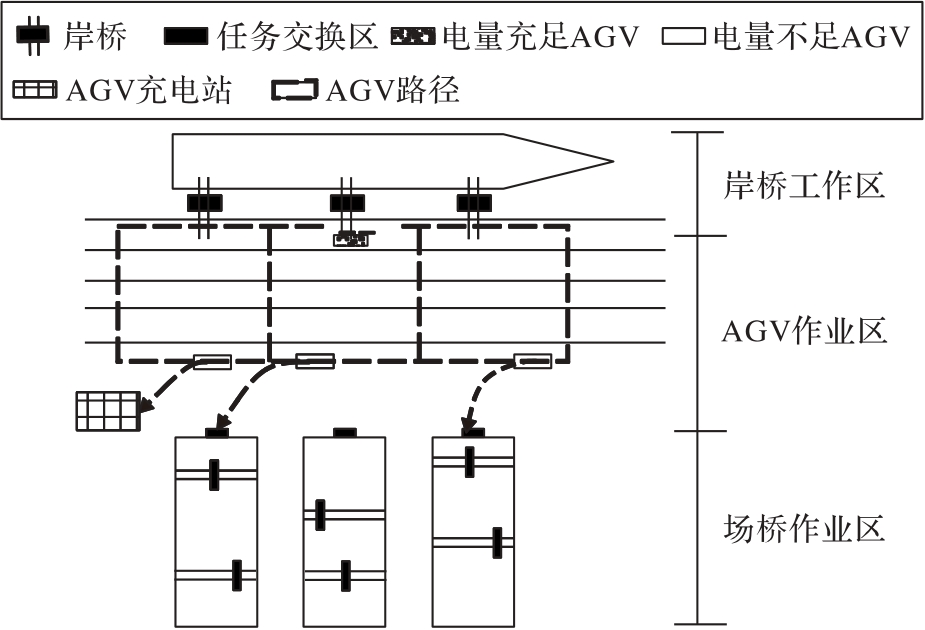
Fig.1 ACT actual layout
| 参数 | 说明 |
|---|---|
| V | AGV集合,v∈V |
| K | 岸桥集合,k∈K |
| H | 场桥集合,h∈H |
| I | 作业任务集合,I=1,2,…,l(l是作业任务) |
| Ik | 岸桥k∈K的任务集合 |
| Ih | 场桥h∈H的任务集合 |
| Ic | 充电任务集合,Ic=l+1,l+2,…,l+l。如果AGV v在执行 任务i∈I后前往充电站充电,那么该充电任务为任务l+i |
| I* | 所有任务集合,I*= I ∪ Ic, i,j∈ I* |
| I+ | 装载作业任务集合 |
| I- | 卸载作业任务集合 |
| M | 一个足够大的数 |
| G | AGV的最大电池容量,G为常数 |
| β | 作业性质,任务i为装载任务时,βi =1,反之为0 |
| g | AGV的充电阈值,当AGVv的电量小于g时,需要到充电站进行充电 |
| δ1,δ2 | AGVv分别处于空载行驶状态、负载行驶状态下的单位耗电量 |
| 岸桥、场桥和AGV从任务i的结束位置移动到任务j的开始位置所需的时间,当j=i时表示岸桥、场桥从任务i的开始位置移动到结束位置所需的时间 | |
| μ | 单位时间AGV充电速率,单位为A·h/s |
Tab.1 Parameters description
| 参数 | 说明 |
|---|---|
| V | AGV集合,v∈V |
| K | 岸桥集合,k∈K |
| H | 场桥集合,h∈H |
| I | 作业任务集合,I=1,2,…,l(l是作业任务) |
| Ik | 岸桥k∈K的任务集合 |
| Ih | 场桥h∈H的任务集合 |
| Ic | 充电任务集合,Ic=l+1,l+2,…,l+l。如果AGV v在执行 任务i∈I后前往充电站充电,那么该充电任务为任务l+i |
| I* | 所有任务集合,I*= I ∪ Ic, i,j∈ I* |
| I+ | 装载作业任务集合 |
| I- | 卸载作业任务集合 |
| M | 一个足够大的数 |
| G | AGV的最大电池容量,G为常数 |
| β | 作业性质,任务i为装载任务时,βi =1,反之为0 |
| g | AGV的充电阈值,当AGVv的电量小于g时,需要到充电站进行充电 |
| δ1,δ2 | AGVv分别处于空载行驶状态、负载行驶状态下的单位耗电量 |
| 岸桥、场桥和AGV从任务i的结束位置移动到任务j的开始位置所需的时间,当j=i时表示岸桥、场桥从任务i的开始位置移动到结束位置所需的时间 | |
| μ | 单位时间AGV充电速率,单位为A·h/s |
| 变量 | 说明 |
|---|---|
| xvij | 若AGVv在执行完任务i∈I* 后执行任务j∈I*,则xvij =1;否则xvij =0 |
| ykij | 若岸桥k在执行完任务i∈Ik 后执行任务j∈Ik,则ykij =1;否则ykij =0 |
| zhij | 若场桥h在执行完任务i∈Ih 后执行任务j∈Ih,则zhij=1;否则zhij =0 |
| φvi | 若AGVv执行任务i∈I*,则φvi =1;否则φvi =0 |
| avi,Avi | 若任务i∈I*是AGVv的开始(结束)任务,则为1;反之为0 |
| bi,Bi | 若任务i∈I是岸桥k的开始(结束)任务,则为1;反之为0 |
| di,Di | 若任务i∈I是场桥h的开始(结束)任务,则为1;反之为0 |
| fi1 | 岸桥k执行作业任务 |
| fi2 | 场桥h执行作业任务 |
| fi3 | AGVv完成充电任务 |
| 岸桥k执行作业任务 | |
| 场桥h执行作业任务 | |
| rvi | AGVv到达开始执行任务 |
| qvi | AGVv执行充电任务 |
| AGVv到达执行任务 | |
| AGVv到达执行任务 | |
| AGVv执行充电任务 | |
| Evi | AGVv完成任务 |
Tab.2 Variable description
| 变量 | 说明 |
|---|---|
| xvij | 若AGVv在执行完任务i∈I* 后执行任务j∈I*,则xvij =1;否则xvij =0 |
| ykij | 若岸桥k在执行完任务i∈Ik 后执行任务j∈Ik,则ykij =1;否则ykij =0 |
| zhij | 若场桥h在执行完任务i∈Ih 后执行任务j∈Ih,则zhij=1;否则zhij =0 |
| φvi | 若AGVv执行任务i∈I*,则φvi =1;否则φvi =0 |
| avi,Avi | 若任务i∈I*是AGVv的开始(结束)任务,则为1;反之为0 |
| bi,Bi | 若任务i∈I是岸桥k的开始(结束)任务,则为1;反之为0 |
| di,Di | 若任务i∈I是场桥h的开始(结束)任务,则为1;反之为0 |
| fi1 | 岸桥k执行作业任务 |
| fi2 | 场桥h执行作业任务 |
| fi3 | AGVv完成充电任务 |
| 岸桥k执行作业任务 | |
| 场桥h执行作业任务 | |
| rvi | AGVv到达开始执行任务 |
| qvi | AGVv执行充电任务 |
| AGVv到达执行任务 | |
| AGVv到达执行任务 | |
| AGVv执行充电任务 | |
| Evi | AGVv完成任务 |
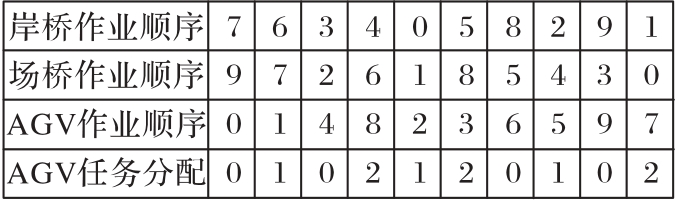
Fig.2 Chromosome coding
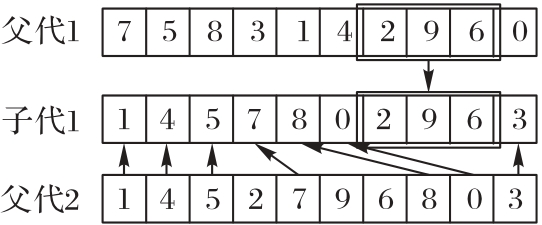
Fig.3 Order crossover of chromosome
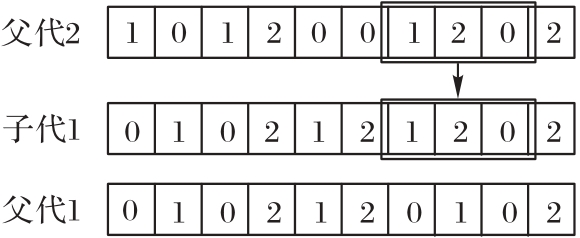
Fig.4 Two-point crossover of chromosome
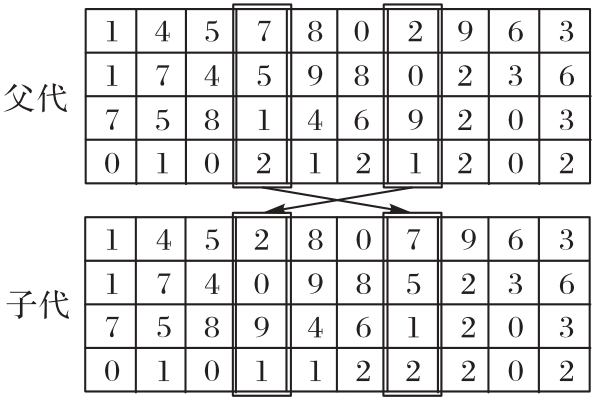
Fig.5 Chromosome mutation
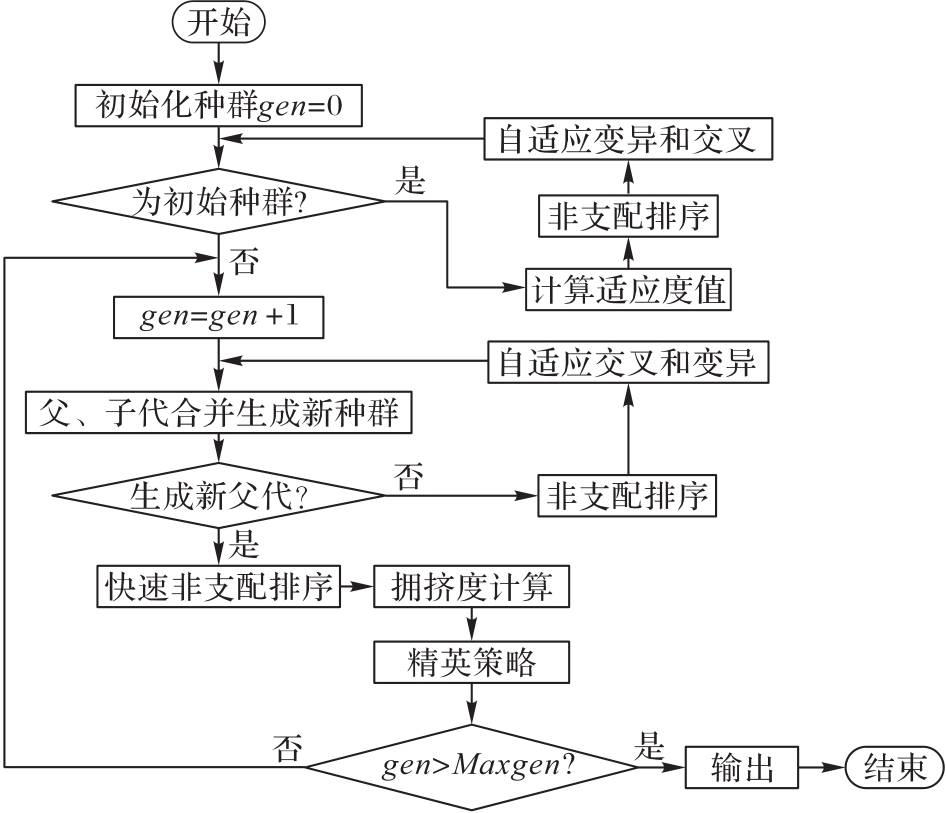
Fig.6 Flowchart of adaptive NSGA-Ⅱ
| 类别 | 参数 | 数值 |
|---|---|---|
算法 基本参数 | Pc1 | 0.8 |
| Pc2 | 0.6 | |
| 种群数 | 40 | |
| Pm1 | 0.1 | |
| Pm2 | 0.01 | |
| 最大迭代次数 | 500 | |
设备 基本参数 | 速度/(m·s-1) | 2 |
| 安全阈值/% | 30 | |
| 充电率/(%·s-1) | 0.2 | |
| 重载耗电量/(%·s-1) | 0.4 | |
| 空载耗电量/(%·s-1) | 0.2 | |
| 岸桥操作时间/s | 130 | |
| 场桥操作时间/s | 120 |
Tab.3 Related parameters
| 类别 | 参数 | 数值 |
|---|---|---|
算法 基本参数 | Pc1 | 0.8 |
| Pc2 | 0.6 | |
| 种群数 | 40 | |
| Pm1 | 0.1 | |
| Pm2 | 0.01 | |
| 最大迭代次数 | 500 | |
设备 基本参数 | 速度/(m·s-1) | 2 |
| 安全阈值/% | 30 | |
| 充电率/(%·s-1) | 0.2 | |
| 重载耗电量/(%·s-1) | 0.4 | |
| 空载耗电量/(%·s-1) | 0.2 | |
| 岸桥操作时间/s | 130 | |
| 场桥操作时间/s | 120 |
| 实验序号 | 任务 数 | AGV 数 | CPLEX | NSGA-Ⅱ | MOPSO | 自适应NSGA-Ⅱ | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| f1/s | f2/Ah | time/s | f1/s | f2/Ah | time/s | f1/s | f2/Ah | time/s | f1/s | f2/Ah | time/s | |||
| 1 | 10 | 3 | 2 485 | 1 059 | 200.0 | 2 470 | 922 | 55.6 | 3 072 | 1 020 | 52.4 | 2 460 | 920 | 53.7 |
| 2 | 10 | 4 | 1 925 | 825 | 49.9 | 1 898 | 780 | 55.7 | 2 369 | 893 | 53.4 | 1 805 | 739 | 54.2 |
| 3 | 15 | 4 | 3 075 | 1 538 | 773.8 | 3 131 | 1 432 | 113.7 | 3 984 | 1 590 | 112.3 | 3 044 | 1 403 | 111.5 |
| 4 | 15 | 6 | 2 510 | 1 258 | 144.3 | 2 283 | 1 102 | 118.6 | 3 145 | 1 388 | 116.7 | 2 193 | 1 079 | 115.7 |
| 5 | 20 | 4 | 5 130* | 2 475* | 3 600.0 | 4 585 | 2 231 | 199.7 | 5 652 | 2 412 | 200.9 | 4 456 | 2 180 | 192.6 |
| 6 | 20 | 6 | 3 620* | 1 885* | 3 600.0 | 3 417 | 1 867 | 216.9 | 4 492 | 2 138 | 220.5 | 3 351 | 1 794 | 216.7 |
Tab.4 Objective solution results and running time of algorithms
| 实验序号 | 任务 数 | AGV 数 | CPLEX | NSGA-Ⅱ | MOPSO | 自适应NSGA-Ⅱ | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| f1/s | f2/Ah | time/s | f1/s | f2/Ah | time/s | f1/s | f2/Ah | time/s | f1/s | f2/Ah | time/s | |||
| 1 | 10 | 3 | 2 485 | 1 059 | 200.0 | 2 470 | 922 | 55.6 | 3 072 | 1 020 | 52.4 | 2 460 | 920 | 53.7 |
| 2 | 10 | 4 | 1 925 | 825 | 49.9 | 1 898 | 780 | 55.7 | 2 369 | 893 | 53.4 | 1 805 | 739 | 54.2 |
| 3 | 15 | 4 | 3 075 | 1 538 | 773.8 | 3 131 | 1 432 | 113.7 | 3 984 | 1 590 | 112.3 | 3 044 | 1 403 | 111.5 |
| 4 | 15 | 6 | 2 510 | 1 258 | 144.3 | 2 283 | 1 102 | 118.6 | 3 145 | 1 388 | 116.7 | 2 193 | 1 079 | 115.7 |
| 5 | 20 | 4 | 5 130* | 2 475* | 3 600.0 | 4 585 | 2 231 | 199.7 | 5 652 | 2 412 | 200.9 | 4 456 | 2 180 | 192.6 |
| 6 | 20 | 6 | 3 620* | 1 885* | 3 600.0 | 3 417 | 1 867 | 216.9 | 4 492 | 2 138 | 220.5 | 3 351 | 1 794 | 216.7 |
基础 数据 | 自适应NSGA-Ⅱ与CPLEX/% | 自适应NSGA-Ⅱ与NSGA-Ⅱ/% | 自适应NSGA-Ⅱ与MOPSO/% | |||
|---|---|---|---|---|---|---|
| GAP1 | GAP2 | GAP3 | GAP4 | GAP5 | GAP6 | |
| 平均值 | 6.91 | 10.57 | 2.80 | 2.63 | 24.03 | 14.46 |
| 10/3 | 1.01 | 13.13 | 0.41 | 0.22 | 19.92 | 9.80 |
| 10/4 | 6.23 | 10.42 | 4.90 | 5.26 | 23.81 | 17.25 |
| 15/4 | 1.01 | 8.88 | 2.78 | 2.03 | 23.59 | 11.76 |
| 15/6 | 12.63 | 14.23 | 3.94 | 2.09 | 30.27 | 22.26 |
| 20/4 | 13.14 | 11.92 | 2.81 | 2.29 | 21.16 | 9.62 |
| 20/6 | 7.43 | 4.83 | 1.93 | 3.91 | 25.40 | 16.09 |
Tab.5 Comparison of difference between algorithm results
基础 数据 | 自适应NSGA-Ⅱ与CPLEX/% | 自适应NSGA-Ⅱ与NSGA-Ⅱ/% | 自适应NSGA-Ⅱ与MOPSO/% | |||
|---|---|---|---|---|---|---|
| GAP1 | GAP2 | GAP3 | GAP4 | GAP5 | GAP6 | |
| 平均值 | 6.91 | 10.57 | 2.80 | 2.63 | 24.03 | 14.46 |
| 10/3 | 1.01 | 13.13 | 0.41 | 0.22 | 19.92 | 9.80 |
| 10/4 | 6.23 | 10.42 | 4.90 | 5.26 | 23.81 | 17.25 |
| 15/4 | 1.01 | 8.88 | 2.78 | 2.03 | 23.59 | 11.76 |
| 15/6 | 12.63 | 14.23 | 3.94 | 2.09 | 30.27 | 22.26 |
| 20/4 | 13.14 | 11.92 | 2.81 | 2.29 | 21.16 | 9.62 |
| 20/6 | 7.43 | 4.83 | 1.93 | 3.91 | 25.40 | 16.09 |
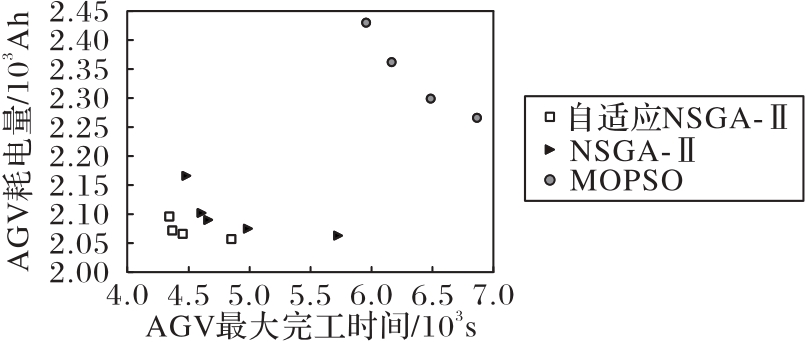
Fig.7 Pareto optimal solution sets obtained from experiment 5 by three algorithms
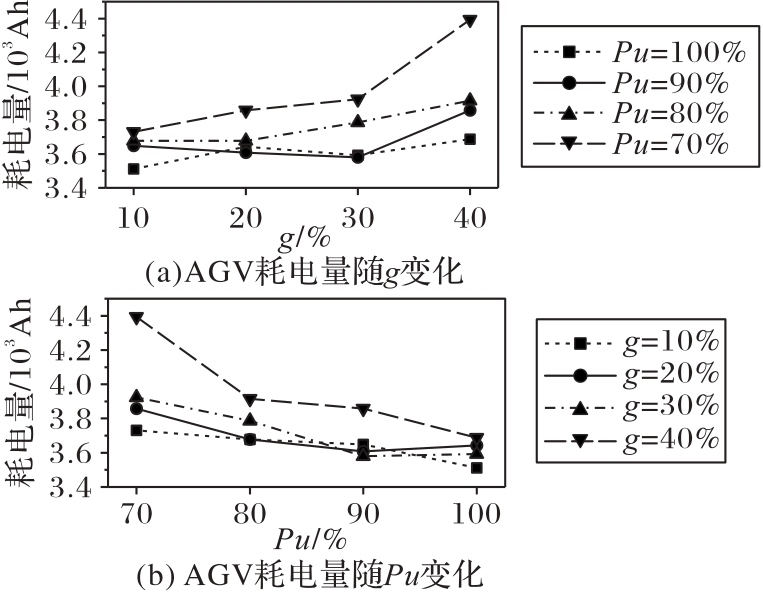
Fig.8 Changes of AGV power consumption
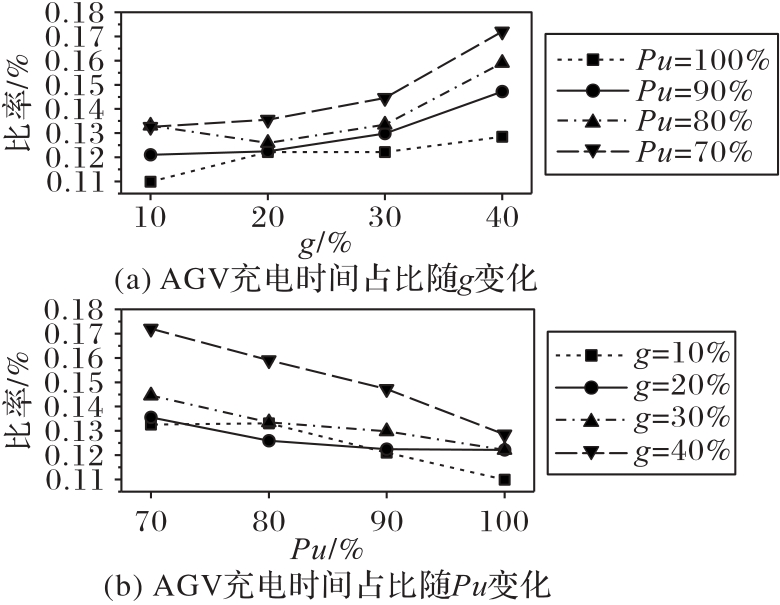
Fig.9 AGV充电时间占比变化
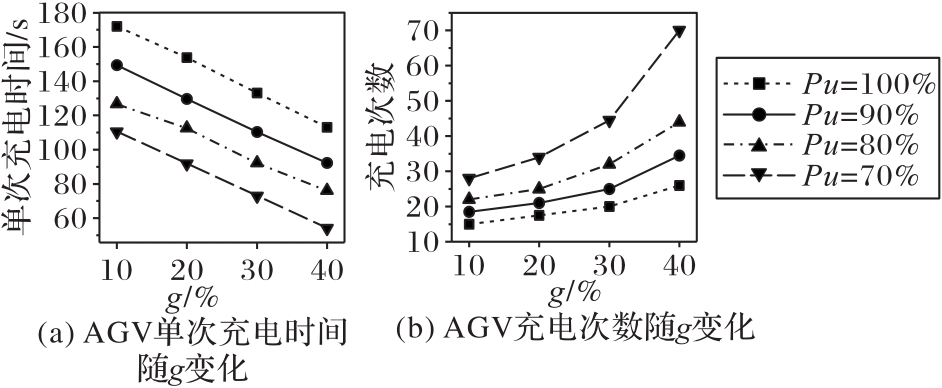
Fig.10 Charging time and number of charges varying with g
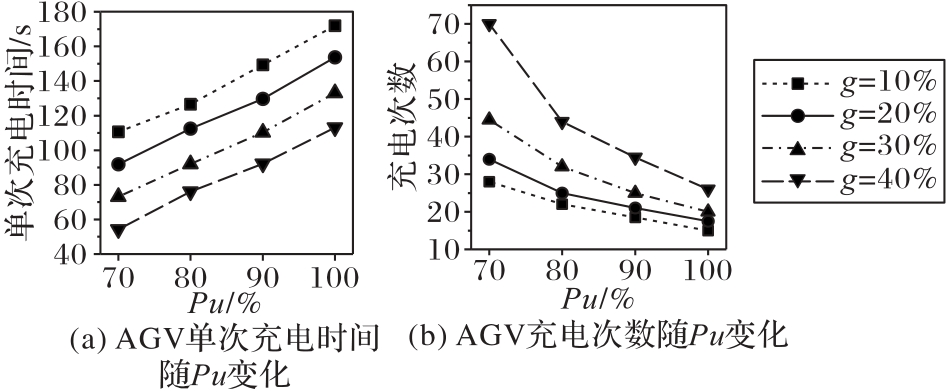
Fig.11 Charging time and number of charges varying with Pu
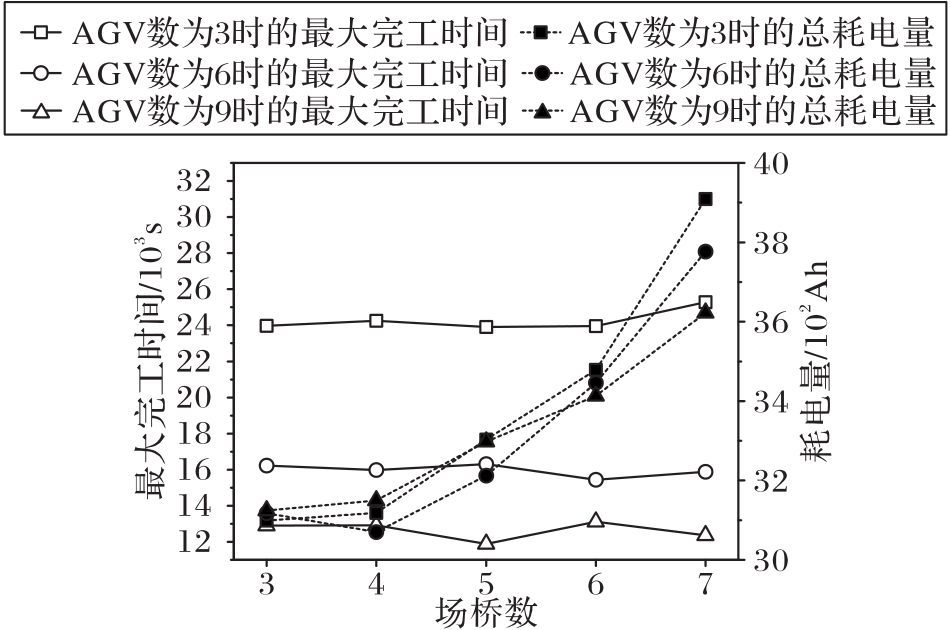
Fig.12 Changes of completion time and AGV power consumption

Fig. 13 Changes of time utilization of equipments
| 1 | LIU D, GE Y-E. Modeling assignment of quay cranes using queueing theory for minimizing CO2 emission at a container terminal [J]. Transportation Research Part D: Transport and Environment, 2018, 61(A): 140-151. 10.1016/j.trd.2017.06.006 |
| 2 | 范厚明,岳丽君,李荡,等.考虑路径冲突的AGV配置与调度优化[J].运筹与管理,2020,29(5):43-51 |
| FAN H M, YUE L J, LI D, et al. Optimization of AGV dispatching and configuration considering path conflict [J]. Operations Research and Management Science, 2020, 29(5): 43-51. | |
| 3 | ZHAO Q R, JI S W, GUO D, et al. Research on cooperative scheduling of automated quayside cranes and automatic guided vehicles in automated container terminal [J]. Mathematical Problems in Engineering, 2019, 2019: No. 6574582. 10.1155/2019/6574582 |
| 4 | 周玉清, 韩晓龙. 双循环策略下岸桥与跨运车的联合调度 [J].计算机应用: 2023,43(2):645-653. 10.11772/j.issn.1001-9081.2021122042 |
| ZHOU Y Q, HAN X L. Joint operation of quay crane and straddle carrier under double-cycle strategy [J].Journal of Computer Applications,2023,43(2): 645-653. 10.11772/j.issn.1001-9081.2021122042 | |
| 5 | YANG Y, ZHONG M, DESSOUKY Y, et al. An integrated scheduling method for AGV routing in automated container terminals [J]. Computers & Industrial Engineering, 2018, 126: 482-493. 10.1016/j.cie.2018.10.007 |
| 6 | JONKER T, DUINKERKEN M B, YORKE-SMITH N, et al. Coordinated optimization of equipment operations in a container terminal [J]. Flexible Services and Manufacturing Journal, 2019, 33: 281-311. |
| 7 | ZHANG H, QI L, LUAN W, et al. Double-cycling AGV scheduling considering uncertain crane operational time at container terminals[J]. Applied Sciences,2022,12: No.4820. 10.3390/app12104820 |
| 8 | 陈铮荣. 考虑AGV无冲突路径规划的自动化集装箱码头集成调度 [D].北京:北京交通大学, 2020:5-7. 10.1016/j.cie.2020.106371 |
| CHEN Z R.Integrated scheduling considering AGV conflict-free path planning in automated container terminal [D]. Beijing: Beijing Jiaotong University, 2020:5-7. 10.1016/j.cie.2020.106371 | |
| 9 | 吴洪明, 邹梦艳. 考虑电池电量约束的自动化码头AGV调度 [J]. 起重运输机械, 2021(3): 47-52. |
| WU H M, ZOU M Y. AGV scheduling of automated terminal considering battery power constraints [J]. Hoisting and Conveying Machinery, 2021(3): 47-52. | |
| 10 | SWEDA T M, DOLINSKAYA I S, KLABJAN D. Optimal recharging policies for electric vehicles [J]. Transportation Science, 2017, 51(2): 457-479. 10.1287/trsc.2015.0638 |
| 11 | 周小凡, 苌道方, 余芳, 等. 考虑充电和等待时间的集装箱码头AGV调度 [J]. 上海海事大学学报, 2019, 40(3): 1-5,13. |
| ZHOU X F, CHANG D F, YU F, et al. Scheduling of AGV in container terminals considering charging and waiting time [J]. Journal of Shanghai Maritime University, 2019, 40(3): 1-5,13. | |
| 12 | 张亚琦,杨斌,胡志华,等.自动化码头AGV充电与作业的集成调度研究 [J]. 计算机工程与应用, 2017, 53(18): 257-262,270. 10.3778/j.issn.1002-8331.1605-0003 |
| ZHANG Y Q, YANG B, HU Z H,et al. Research of AGV charging and job integrated scheduling at automated container terminal [J]. Computer Engineering and Applications, 2017, 53(18): 257-262,270. 10.3778/j.issn.1002-8331.1605-0003 | |
| 13 | 赵涛, 梁承姬, 胡筱渊, 等. 自动化集装箱码头AGV调度与换电双层模型求解 [J]. 大连理工大学学报, 2021, 61(6): 623-633. |
| ZHAO T, LIANG C J, HU X Y,et al. Solution of AGV scheduling and battery exchange two-layer model for automated container terminal [J]. Journal of Dalian University of Technology, 2021, 61(6): 623-633. | |
| 14 | 陈珲, 韩晓龙. 考虑充电策略的自动化码头AGV调度 [J]. 上海海事大学学报, 2021, 42(2): 20-25,74. |
| CHEN H, HAN X L. AGV scheduling of automated terminals considering charging strategy [J]. Journal of Shanghai Maritime University, 2021, 42(2): 20-25,74. | |
| 15 | 傅正堂, 胡志华, 宗康. 集装箱码头AGV电量非饱和状态下的调度优化 [J]. 大连海事大学学报, 2017, 43(3): 58-62. |
| FU Z T, HU Z H, ZONG K. Scheduling optimization of container terminal AGV under electricity unsaturation condition [J]. Journal of Dalian Maritime University, 2017, 43(3): 58-62. | |
| 16 | 谢旦岚,郭笛,纪媛,等.自动化码头运输设备充电策略优化的仿真研究 [J]. 系统仿真学报, 2020, 32(10): 1927-1935. |
| XIE D L, GUO D, JI Y,et al. Simulation research on optimization of AGV charging strategy for automated terminal [J]. Journal of System Simulation, 2020, 32(10): 1927-1935. | |
| 17 | DEB K, PRATAP A, AGARWAL S, et al. A fast and elitist multiobjective genetic algorithm: NSGA‑Ⅱ [J]. IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182-197. 10.1109/4235.996017 |
| 18 | SRINIVAS M, PATNAIK L M. Adaptive probabilities of crossover and mutation in genetic algorithms [J]. IEEE Transactions on Systems, Man, and Cybernetics, 1994, 24(4): 656-667. 10.1109/21.286385 |
| 19 | ZHAN X, XU L, ZHANG J, et al. Study on AGVs battery charging strategy for improving utilization [J]. Procedia CIRP, 2019, 81: 558-563. 10.1016/j.procir.2019.03.155 |
| 20 | COELLO C A C, PULIDO G T, LECHUGA M S. Handling multiple objectives with particle swarm optimization [J]. IEEE Transactions on Evolutionary Computation, 2004,8(3): 256-279. 10.1109/tevc.2004.826067 |
| 21 | CHEN J C, CHEN T-L, TENG Y-C. Meta-model based simulation optimization for automated guided vehicle system under different charging mechanisms [J]. Simulation Modelling Practice and Theory, 2021, 106: 102208. 10.1016/j.simpat.2020.102208 |
| 22 | SCHNEIDER M, STENGER A, GOEKE D. The electric vehicle-routing problem with time windows and recharging stations [J]. Transportation Science, 2014, 48(4): 500-520. 10.1287/trsc.2013.0490 |
| [1] | Houming FAN, Shuang MU, Lijun YUE. Collaborative optimization of automated guided vehicle scheduling and path planning considering conflict and congestion [J]. Journal of Computer Applications, 2022, 42(7): 2281-2291. |
| [2] | LIU Shize, QIN Yanjun, WANG Chenxing, GAO Cunyuan, LUO Haiyong, ZHAO Fang, WANG Baohui. Transportation mode recognition algorithm based on multi-scale feature extraction [J]. Journal of Computer Applications, 2021, 41(6): 1573-1580. |
| [3] | YANG Wei, LI Ran, ZHANG Kun. Task allocation optimization for automated guided vehicles based on variable neighborhood simulated annealing algorithm [J]. Journal of Computer Applications, 2021, 41(10): 3056-3062. |
| [4] | LIU Yuliang, CHEN Huaili. Distribution path planning and charging strategy for pure electric vehicles with load constraint [J]. Journal of Computer Applications, 2020, 40(10): 2831-2837. |
| [5] | ZHANG Jie, YANG Chunyu, JU Fei, XU Xiaolong. Optimization of ordered charging strategy for large scale electric vehicles based on quadratic clustering [J]. Journal of Computer Applications, 2017, 37(10): 2978-2982. |
| [6] | WEI Pei, JIANG Ping, HE Jingjing, ZHANG Huimeng. Ultra wideband indoor localization based on inner triangle centroid algorithm [J]. Journal of Computer Applications, 2017, 37(1): 289-293. |
| [7] | SONG Guozhi, WANG Cheng, TU Yao, ZHANG Dakun. Low power mapping based on improved genetic algorithm with Prim initial population selection for 3D network-on-chip [J]. Journal of Computer Applications, 2017, 37(1): 90-96. |
| [8] | CHEN Pengzhan, LI Jie, LUO Man. Study of human motion tracking system based on wireless sensor network [J]. Journal of Computer Applications, 2015, 35(8): 2316-2320. |
| [9] | ZUO Cheng, YU Hongfang. Reliability-aware virtual data center embedding algorithm [J]. Journal of Computer Applications, 2015, 35(2): 299-304. |
| [10] | GUO Binglei, YU Jiong, LIAO Bin, YANG Dexian. Dynamic power consumption profiling and modeling by structured query language [J]. Journal of Computer Applications, 2015, 35(12): 3362-3367. |
| [11] | XU Jun-yong PAN Yu LING Chen. Power-aware resource scheduling under cloud computing environment [J]. Journal of Computer Applications, 2012, 32(07): 1913-1915. |
| [12] | LI Ran GUO Bing SHEN Yan WANG Ji-he WU Yuan-sheng LIU Yun-ben. Power-related hardware/software partitioning based on Hopfield neural network and tabu search [J]. Journal of Computer Applications, 2011, 31(03): 822-825. |
| [13] | . Research and application of synchronization compensation mechanism in wireless sensor networks [J]. Journal of Computer Applications, 2010, 30(4): 892-894. |
| [14] | . Design and implementation of real-time power measurement system for server's key energy components [J]. Journal of Computer Applications, 2010, 30(10): 2846-2849. |
| [15] | . Design and implementation of I/O power consumption simulation modules of power consumption simulator HMSim [J]. Journal of Computer Applications, 2010, 30(07): 1987-1990. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||