


Journal of Computer Applications ›› 2022, Vol. 42 ›› Issue (7): 2281-2291.DOI: 10.11772/j.issn.1001-9081.2021050819
Special Issue: 前沿与综合应用
• Frontier and comprehensive applications • Previous Articles Next Articles
Houming FAN, Shuang MU, Lijun YUE( )
)
Received:2021-05-19
Revised:2022-02-21
Accepted:2022-05-25
Online:2022-03-15
Published:2022-07-10
Contact:
Lijun YUE
About author:FAN Houming, born in 1962, Ph. D., professor. His research interests include transportation system planning and design.Supported by:
范厚明, 牟爽, 岳丽君()
通讯作者:
岳丽君
作者简介:范厚明(1962—),男,山东蓬莱人,教授,博士生导师,博士,主要研究方向:交通运输系统规划与设计基金资助:CLC Number:
Houming FAN, Shuang MU, Lijun YUE. Collaborative optimization of automated guided vehicle scheduling and path planning considering conflict and congestion[J]. Journal of Computer Applications, 2022, 42(7): 2281-2291.
范厚明, 牟爽, 岳丽君. 考虑冲突和拥堵的自动导引车调度与路径规划协同优化[J]. 《计算机应用》唯一官方网站, 2022, 42(7): 2281-2291.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2021050819

Fig. 1 Schematic diagram of terminal layout and AGV transportation process
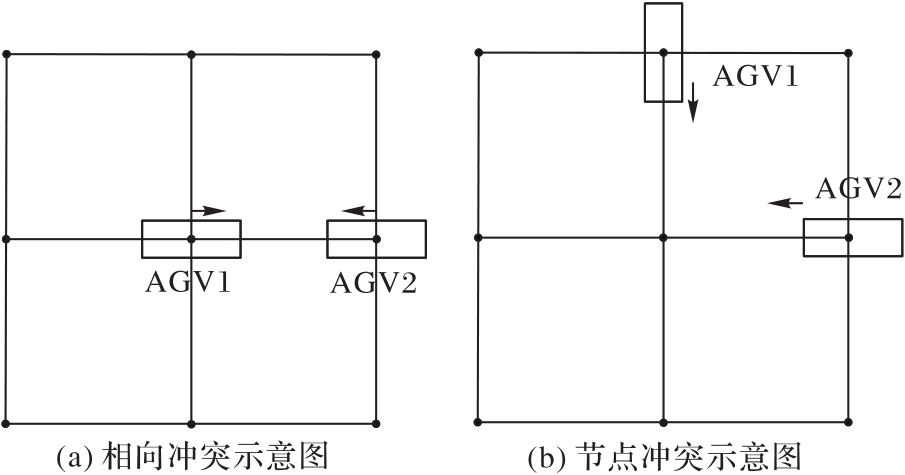
Fig. 2 Schematic diagram of conflict
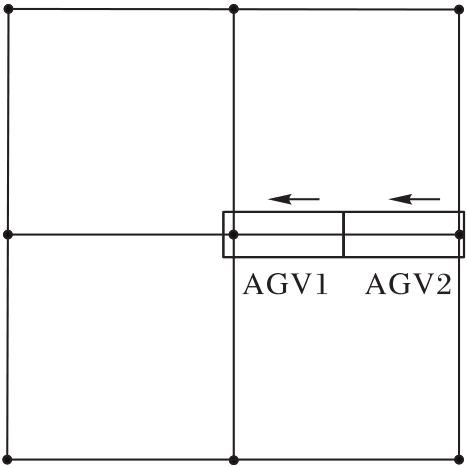
Fig. 3 Schematic diagram of path congestion
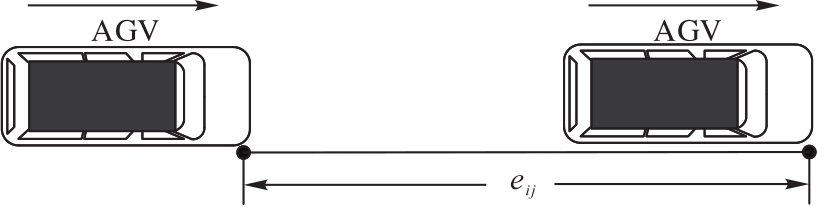
Fig. 4 Schematic diagram of AGV road section
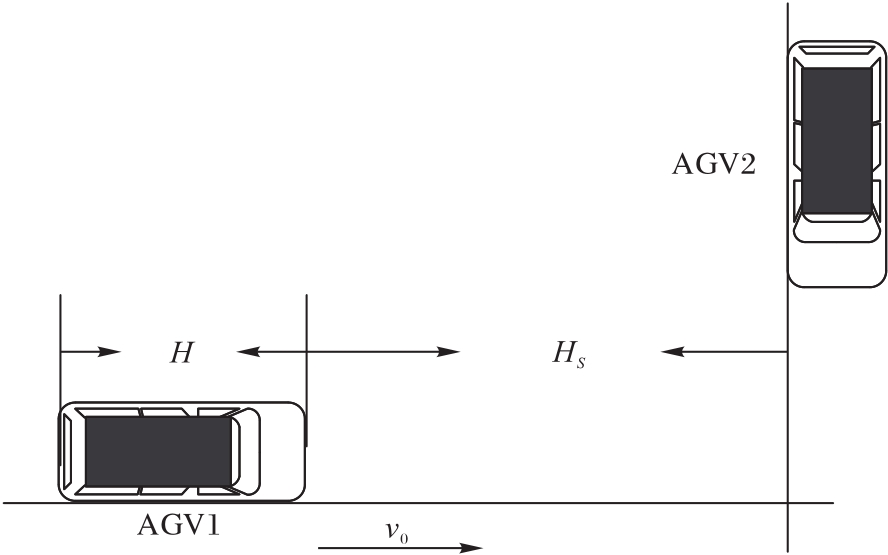
Fig. 5 Schematic diagram of AGV node conflict
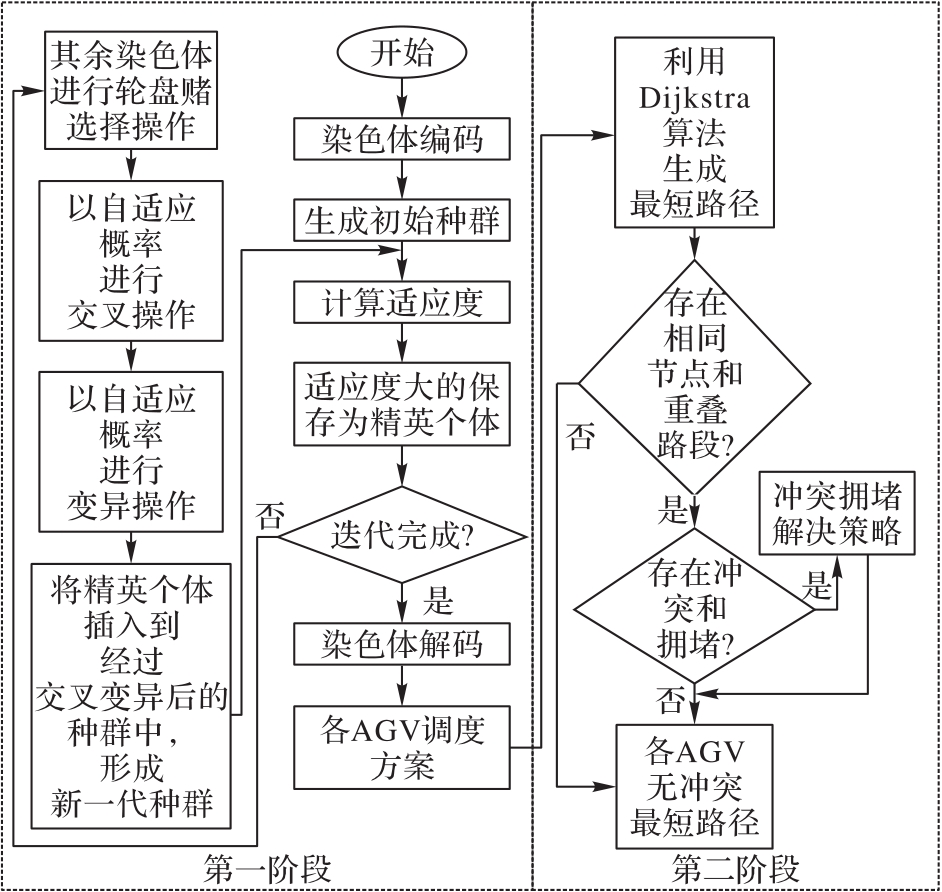
Fig. 6 Flow of improved adaptive genetic algorithm and Dijkstra algorithm

Fig. 7 Schematic diagram of chromosome coding

Fig. 8 Schematic diagram of chromosome repair

Fig. 9 Solution flow of objective function
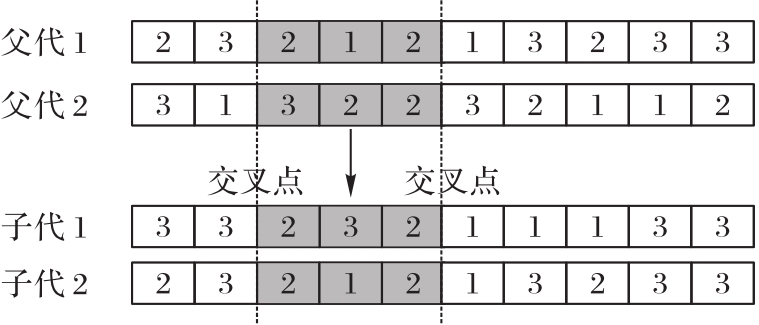
Fig. 10 Schematic diagram of chromosome crossover operation
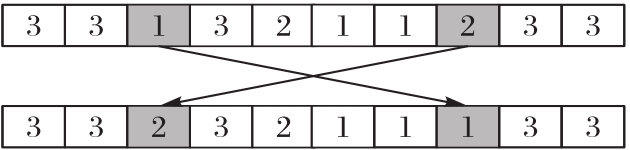
Fig. 11 Schematic diagram of chromosome mutation operation
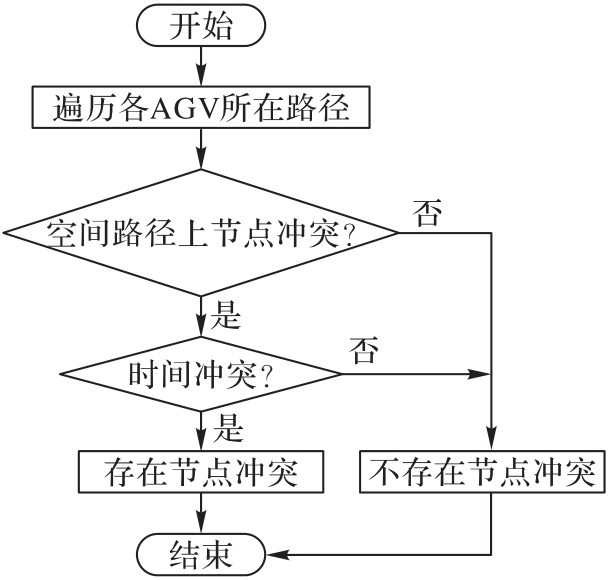
Fig. 12 Node conflict detection flow
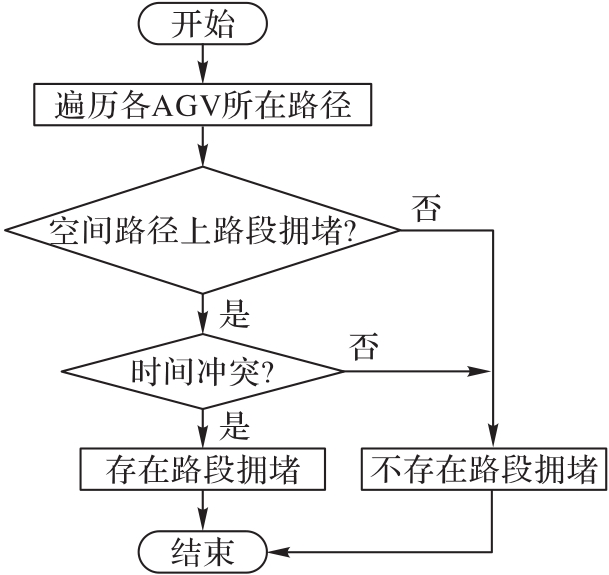
Fig. 13 Path congestion detection flow
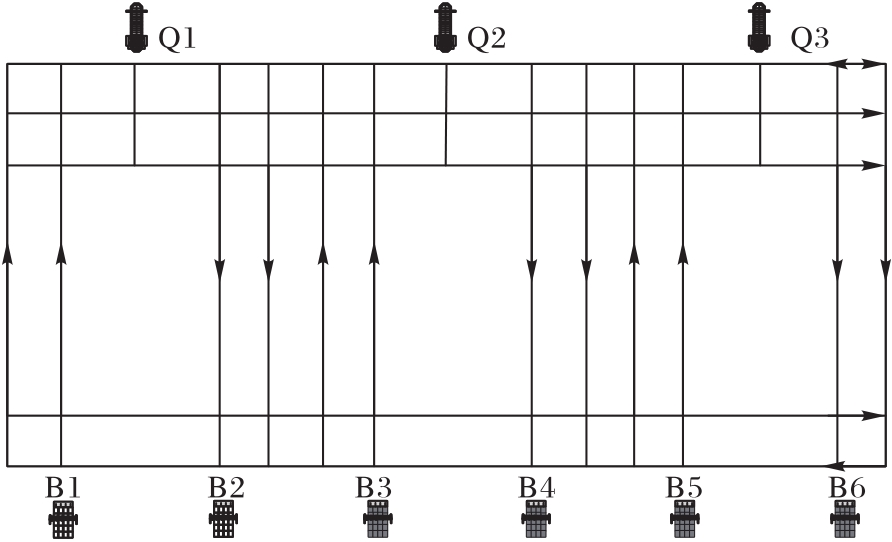
Fig. 14 Schematic diagram of automated container terminal path network layout
| 岸桥/箱区 | 节点 | 岸桥/箱区 | 节点 | 岸桥/箱区 | 节点 |
|---|---|---|---|---|---|
| Q1 | 3 | B1 | 59 | B4 | 64 |
| Q2 | 8 | B2 | 60 | B5 | 67 |
| Q3 | 13 | B3 | 63 | B6 | 68 |
Tab. 1 Node numbers corresponding to quay cranes and container areas
| 岸桥/箱区 | 节点 | 岸桥/箱区 | 节点 | 岸桥/箱区 | 节点 |
|---|---|---|---|---|---|
| Q1 | 3 | B1 | 59 | B4 | 64 |
| Q2 | 8 | B2 | 60 | B5 | 67 |
| Q3 | 13 | B3 | 63 | B6 | 68 |
| 实验 | N | A | 本文IAGA | GA | GAP/% | ||
|---|---|---|---|---|---|---|---|
| f1/s | CPU/s | CPU/s | |||||
| 1 | 21 | 3 | 610 | 3.75 | 689 | 4.37 | 12.95 |
| 2 | 42 | 3 | 1 214 | 7.23 | 1 384 | 8.08 | 14.00 |
| 3 | 42 | 6 | 988 | 7.43 | 1 085 | 8.12 | 9.82 |
| 4 | 60 | 3 | 1 839 | 11.05 | 2 064 | 12.16 | 12.23 |
| 5 | 60 | 6 | 1 478 | 11.27 | 1 634 | 12.34 | 10.55 |
| 6 | 90 | 3 | 2 935 | 15.03 | 3 212 | 26.07 | 9.44 |
| 7 | 90 | 6 | 2 361 | 18.42 | 2 591 | 21.45 | 9.74 |
| 8 | 90 | 9 | 2 168 | 19.34 | 2 341 | 22.15 | 7.98 |
| 9 | 150 | 6 | 3 845 | 35.69 | 4 240 | 40.38 | 10.27 |
| 10 | 150 | 9 | 3 637 | 33.40 | 3 874 | 38.47 | 6.52 |
| 11 | 240 | 6 | 6 256 | 60.26 | 6 591 | 68.88 | 5.35 |
| 12 | 240 | 9 | 5 637 | 58.91 | 5 945 | 67.54 | 5.46 |
| 13 | 300 | 6 | 7 885 | 82.80 | 8 407 | 93.83 | 6.62 |
| 14 | 300 | 9 | 7 160 | 81.45 | 7 527 | 92.21 | 5.13 |
Tab. 2 Comparison of numerical example results
| 实验 | N | A | 本文IAGA | GA | GAP/% | ||
|---|---|---|---|---|---|---|---|
| f1/s | CPU/s | CPU/s | |||||
| 1 | 21 | 3 | 610 | 3.75 | 689 | 4.37 | 12.95 |
| 2 | 42 | 3 | 1 214 | 7.23 | 1 384 | 8.08 | 14.00 |
| 3 | 42 | 6 | 988 | 7.43 | 1 085 | 8.12 | 9.82 |
| 4 | 60 | 3 | 1 839 | 11.05 | 2 064 | 12.16 | 12.23 |
| 5 | 60 | 6 | 1 478 | 11.27 | 1 634 | 12.34 | 10.55 |
| 6 | 90 | 3 | 2 935 | 15.03 | 3 212 | 26.07 | 9.44 |
| 7 | 90 | 6 | 2 361 | 18.42 | 2 591 | 21.45 | 9.74 |
| 8 | 90 | 9 | 2 168 | 19.34 | 2 341 | 22.15 | 7.98 |
| 9 | 150 | 6 | 3 845 | 35.69 | 4 240 | 40.38 | 10.27 |
| 10 | 150 | 9 | 3 637 | 33.40 | 3 874 | 38.47 | 6.52 |
| 11 | 240 | 6 | 6 256 | 60.26 | 6 591 | 68.88 | 5.35 |
| 12 | 240 | 9 | 5 637 | 58.91 | 5 945 | 67.54 | 5.46 |
| 13 | 300 | 6 | 7 885 | 82.80 | 8 407 | 93.83 | 6.62 |
| 14 | 300 | 9 | 7 160 | 81.45 | 7 527 | 92.21 | 5.13 |
| 任务 | 箱子类型 | 起点-终点 | 任务 | 箱子类型 | 起点-终点 | 任务 | 箱子类型 | 起点-终点 |
|---|---|---|---|---|---|---|---|---|
| 1 | U | Q1-B1 | 15 | U | Q1-B1 | 29 | U | Q1-B1 |
| 2 | L | B6-Q3 | 16 | L | B6-Q3 | 30 | L | B3-Q1 |
| 3 | L | B3-Q2 | 17 | L | B4-Q1 | 31 | L | B3-Q3 |
| 4 | U | Q2-B1 | 18 | U | Q2-B2 | 32 | L | B4-Q2 |
| 5 | L | B6-Q2 | 19 | L | B5-Q1 | 33 | L | B6-Q2 |
| 6 | L | B3-Q1 | 20 | U | Q3-B2 | 34 | U | Q2-B1 |
| 7 | L | B5-Q2 | 21 | L | B4-Q2 | 35 | L | Q3-B5 |
| 8 | L | B3-Q4 | 22 | L | B3-Q2 | 36 | L | B6-Q2 |
| 9 | U | Q1-B2 | 23 | U | Q3-B1 | 37 | L | B5-Q1 |
| 10 | U | Q3-B2 | 24 | L | B3-Q1 | 38 | U | Q3-B2 |
| 11 | L | B5-Q2 | 25 | L | B3-Q3 | 39 | U | Q1-B2 |
| 12 | L | B6-Q1 | 26 | L | B4-Q3 | 40 | U | Q2-B1 |
| 13 | U | Q1-B2 | 27 | L | B5-Q2 | 41 | L | B5-Q3 |
| 14 | L | B4-Q3 | 28 | L | B4-Q2 | 42 | L | B6-Q2 |
Tab. 3 Task allocation
| 任务 | 箱子类型 | 起点-终点 | 任务 | 箱子类型 | 起点-终点 | 任务 | 箱子类型 | 起点-终点 |
|---|---|---|---|---|---|---|---|---|
| 1 | U | Q1-B1 | 15 | U | Q1-B1 | 29 | U | Q1-B1 |
| 2 | L | B6-Q3 | 16 | L | B6-Q3 | 30 | L | B3-Q1 |
| 3 | L | B3-Q2 | 17 | L | B4-Q1 | 31 | L | B3-Q3 |
| 4 | U | Q2-B1 | 18 | U | Q2-B2 | 32 | L | B4-Q2 |
| 5 | L | B6-Q2 | 19 | L | B5-Q1 | 33 | L | B6-Q2 |
| 6 | L | B3-Q1 | 20 | U | Q3-B2 | 34 | U | Q2-B1 |
| 7 | L | B5-Q2 | 21 | L | B4-Q2 | 35 | L | Q3-B5 |
| 8 | L | B3-Q4 | 22 | L | B3-Q2 | 36 | L | B6-Q2 |
| 9 | U | Q1-B2 | 23 | U | Q3-B1 | 37 | L | B5-Q1 |
| 10 | U | Q3-B2 | 24 | L | B3-Q1 | 38 | U | Q3-B2 |
| 11 | L | B5-Q2 | 25 | L | B3-Q3 | 39 | U | Q1-B2 |
| 12 | L | B6-Q1 | 26 | L | B4-Q3 | 40 | U | Q2-B1 |
| 13 | U | Q1-B2 | 27 | L | B5-Q2 | 41 | L | B5-Q3 |
| 14 | L | B4-Q3 | 28 | L | B4-Q2 | 42 | L | B6-Q2 |
| AGV | 运输任务 | 行驶路径 |
|---|---|---|
| 1 | 2-16-17-21-22-30-34 | B6-Q3-B6-Q3-B4-Q1-B4-Q2-B3-Q2-B3-Q1-B6-Q3 |
| 2 | 8-10-13-18-28-33 | B4-Q3-B2-Q1-B2-Q2-B2-B4-Q2-B5-Q1 |
| 3 | 1-6-12-23-25-31-36-40 | Q1-B1-B3-Q1-B6-Q1-Q3-B1-B3-Q3- B3-Q3-B6-Q2-B1 |
| 4 | 14-20-27-29-32-37-38 | B4-Q3-B2-B5-Q2-Q1-B1-B4-Q2-B5-Q1-Q3-B2 |
| 5 | 3-4-7-24-26-35-39 | B3-Q2-B1-B5-Q2-B3-Q1-B4-Q3-B5-Q1-B2 |
| 6 | 5-9-11-15-19-41-42 | B6-Q2-Q1-B2-B5-Q2-Q1-B1-B5-Q1-B5-Q3-B6-Q3 |
Tab. 4 AGV scheduling results
| AGV | 运输任务 | 行驶路径 |
|---|---|---|
| 1 | 2-16-17-21-22-30-34 | B6-Q3-B6-Q3-B4-Q1-B4-Q2-B3-Q2-B3-Q1-B6-Q3 |
| 2 | 8-10-13-18-28-33 | B4-Q3-B2-Q1-B2-Q2-B2-B4-Q2-B5-Q1 |
| 3 | 1-6-12-23-25-31-36-40 | Q1-B1-B3-Q1-B6-Q1-Q3-B1-B3-Q3- B3-Q3-B6-Q2-B1 |
| 4 | 14-20-27-29-32-37-38 | B4-Q3-B2-B5-Q2-Q1-B1-B4-Q2-B5-Q1-Q3-B2 |
| 5 | 3-4-7-24-26-35-39 | B3-Q2-B1-B5-Q2-B3-Q1-B4-Q3-B5-Q1-B2 |
| 6 | 5-9-11-15-19-41-42 | B6-Q2-Q1-B2-B5-Q2-Q1-B1-B5-Q1-B5-Q3-B6-Q3 |

Fig. 15 AGV driving paths without considering conflict and congestion factors
| 起终点 | 最短路径 | 行驶 时间/s | 转折数 |
|---|---|---|---|
| B6-Q3 | 68-67-55-42-27-12-13 | 30 | 2 |
| Q3-B6 | 13-14-29-44-56-68 | 22 | 1 |
| B6-Q3 | 68-67-55-42-27-12-13 | 30 | 2 |
| Q3-B4 | 13-14-29-44-56-68-67-66-65-64 | 36 | 2 |
| B4-Q1 | 64-63-62-61-60-59-47-32-17-2-3 | 44 | 2 |
| Q1-B4 | 3-4-5-6-7-8-9-24-39-52-64 | 36 | 1 |
| B4-Q2 | 64-63-51-37-22-7-8 | 30 | 2 |
| Q2-B3 | 8-9-24-39-52-64-63 | 30 | 2 |
| B3-Q2 | 63-51-37-22-7-8 | 22 | 1 |
| Q2-B3 | 8-9-24-39-52-64-63 | 30 | 2 |
| B3-Q1 | 63-62-61-60-59-47-32-17-2-3 | 36 | 2 |
| Q1-B6 | 3-4-5-6-7-8-9-10-11-12-13-14-29-44-56-68 | 50 | 1 |
| B6-Q3 | 68-67-55-42-27-12-13 | 30 | 2 |
Tab. 5 Path for AGV1 to complete task
| 起终点 | 最短路径 | 行驶 时间/s | 转折数 |
|---|---|---|---|
| B6-Q3 | 68-67-55-42-27-12-13 | 30 | 2 |
| Q3-B6 | 13-14-29-44-56-68 | 22 | 1 |
| B6-Q3 | 68-67-55-42-27-12-13 | 30 | 2 |
| Q3-B4 | 13-14-29-44-56-68-67-66-65-64 | 36 | 2 |
| B4-Q1 | 64-63-62-61-60-59-47-32-17-2-3 | 44 | 2 |
| Q1-B4 | 3-4-5-6-7-8-9-24-39-52-64 | 36 | 1 |
| B4-Q2 | 64-63-51-37-22-7-8 | 30 | 2 |
| Q2-B3 | 8-9-24-39-52-64-63 | 30 | 2 |
| B3-Q2 | 63-51-37-22-7-8 | 22 | 1 |
| Q2-B3 | 8-9-24-39-52-64-63 | 30 | 2 |
| B3-Q1 | 63-62-61-60-59-47-32-17-2-3 | 36 | 2 |
| Q1-B6 | 3-4-5-6-7-8-9-10-11-12-13-14-29-44-56-68 | 50 | 1 |
| B6-Q3 | 68-67-55-42-27-12-13 | 30 | 2 |
| 起终点 | 最短路径 | 行驶时间/s | 转折数 |
|---|---|---|---|
| B4-Q3 | 64-52-53-54-41-26-11-12-13 | 28 | 3 |
| Q3-B2 | 13-14-29-44-56-68-67-66-65-64- 63-62-61-60 | 50 | 2 |
| B2-Q1 | 60-59-47-32-17-2-3 | 30 | 2 |
| Q1-B2 | 3-4-19-34-48-60 | 22 | 1 |
| B2-Q2 | 60-48-49-50-36-21-6-7-8 | 28 | 3 |
| Q2-B2 | 8-9-24-39-52-64-63-62-61-60 | 36 | 3 |
| B2-B4 | 60-48-49-50-51-52-64 | 18 | 2 |
| B4-Q2 | 64-63-51-37-22-7-8 | 30 | 2 |
| Q2-B5 | 8-9-24-39-52-53-54-55-67 | 28 | 3 |
| B5-Q1 | 67-66-65-64-63-62-61-60-59-47- 32-17-2-3 | 50 | 2 |
Tab. 6 Path for AGV2 to complete task
| 起终点 | 最短路径 | 行驶时间/s | 转折数 |
|---|---|---|---|
| B4-Q3 | 64-52-53-54-41-26-11-12-13 | 28 | 3 |
| Q3-B2 | 13-14-29-44-56-68-67-66-65-64- 63-62-61-60 | 50 | 2 |
| B2-Q1 | 60-59-47-32-17-2-3 | 30 | 2 |
| Q1-B2 | 3-4-19-34-48-60 | 22 | 1 |
| B2-Q2 | 60-48-49-50-36-21-6-7-8 | 28 | 3 |
| Q2-B2 | 8-9-24-39-52-64-63-62-61-60 | 36 | 3 |
| B2-B4 | 60-48-49-50-51-52-64 | 18 | 2 |
| B4-Q2 | 64-63-51-37-22-7-8 | 30 | 2 |
| Q2-B5 | 8-9-24-39-52-53-54-55-67 | 28 | 3 |
| B5-Q1 | 67-66-65-64-63-62-61-60-59-47- 32-17-2-3 | 50 | 2 |
| 起终点 | 最短路径 | 行驶时间/s | 转折数 |
|---|---|---|---|
| Q1-B1 | 3-4-19-34-48-60-59 | 30 | 2 |
| B1-B3 | 59-47-48-49-50-51-63 | 18 | 2 |
| B3-Q1 | 63-62-61-60-59-47-32-17-2-3 | 36 | 2 |
| Q1-B6 | 3-4-5-6-7-8-9-10-11-12-13-14-29-44-56-68 | 50 | 1 |
| B6-Q1 | 68-67-66-65-64-63-62-61-60-59-47-32-17- 2-3 | 58 | 2 |
| Q1-B3 | 3-4-19-34-48-49-50-51-63 | 28 | 3 |
| Q1-Q3 | 3-4-5-6-7-8-9-10-11-12-13 | 28 | 0 |
| Q3-B1 | 13-14-29-44-56-68-67-66-65-64-63-62-61- 60-59 | 58 | 2 |
| B1-B3 | 59-47-48-49-50-51-63 | 18 | 2 |
| B3-Q3 | 63-51-37-22-7-8-9-10-11-12-13 | 36 | 1 |
| Q3-B3 | 13-14-29-44-56-68-67-66-65-64-63 | 44 | 2 |
| B3-Q3 | 63-51-37-22-7-8-9-10-11-12-13 | 36 | 1 |
| Q3-B6 | 13-14-29-44-56-68 | 22 | 1 |
| B6-Q2 | 68-67-66-65-64-63-51-37-22-7-8 | 44 | 2 |
| Q2-B1 | 8-9-24-39-52-64-63-62-61-60-59 | 44 | 2 |
Tab. 7 Path for AGV3 to complete task
| 起终点 | 最短路径 | 行驶时间/s | 转折数 |
|---|---|---|---|
| Q1-B1 | 3-4-19-34-48-60-59 | 30 | 2 |
| B1-B3 | 59-47-48-49-50-51-63 | 18 | 2 |
| B3-Q1 | 63-62-61-60-59-47-32-17-2-3 | 36 | 2 |
| Q1-B6 | 3-4-5-6-7-8-9-10-11-12-13-14-29-44-56-68 | 50 | 1 |
| B6-Q1 | 68-67-66-65-64-63-62-61-60-59-47-32-17- 2-3 | 58 | 2 |
| Q1-B3 | 3-4-19-34-48-49-50-51-63 | 28 | 3 |
| Q1-Q3 | 3-4-5-6-7-8-9-10-11-12-13 | 28 | 0 |
| Q3-B1 | 13-14-29-44-56-68-67-66-65-64-63-62-61- 60-59 | 58 | 2 |
| B1-B3 | 59-47-48-49-50-51-63 | 18 | 2 |
| B3-Q3 | 63-51-37-22-7-8-9-10-11-12-13 | 36 | 1 |
| Q3-B3 | 13-14-29-44-56-68-67-66-65-64-63 | 44 | 2 |
| B3-Q3 | 63-51-37-22-7-8-9-10-11-12-13 | 36 | 1 |
| Q3-B6 | 13-14-29-44-56-68 | 22 | 1 |
| B6-Q2 | 68-67-66-65-64-63-51-37-22-7-8 | 44 | 2 |
| Q2-B1 | 8-9-24-39-52-64-63-62-61-60-59 | 44 | 2 |
| 起终点 | 最短路径 | 行驶 时间/s | 转折数 |
|---|---|---|---|
| B4-Q3 | 64-52-53-54-41-26-11-12-13 | 28 | 3 |
| Q3-B2 | 13-14-29-44-56-68-67-66-65-64- 63-62-61-60 | 50 | 2 |
| B2-B5 | 60-48-49-50-51-52-53-54-55-67 | 24 | 2 |
| B5-Q2 | 67-66-65-64-63-51-37-22-7-8 | 36 | 2 |
| Q2-Q1 | 8-7-6-5-4-3 | 14 | 0 |
| Q1-B1 | 3-4-19-34-48-60-59 | 30 | 2 |
| B1-B4 | 59-47-48-49-50-51-52-64 | 26 | 2 |
| B4-Q2 | 64-63-51-37-22-7-8 | 30 | 2 |
| Q2-B5 | 8-9-24-39-52-53-54-55-67 | 28 | 3 |
| B5-Q1 | 67-66-65-64-63-62-61-60-59-47- 32-17-2-3 | 50 | 2 |
| Q1-Q3 | 3-4-5-6-7-8-9-10-11-12-13 | 28 | 0 |
| Q3-B2 | 13-14-29-44-56-68-67-66-65-64- 63-62-61-60 | 50 | 2 |
Tab. 8 Path for AGV4 to complete task
| 起终点 | 最短路径 | 行驶 时间/s | 转折数 |
|---|---|---|---|
| B4-Q3 | 64-52-53-54-41-26-11-12-13 | 28 | 3 |
| Q3-B2 | 13-14-29-44-56-68-67-66-65-64- 63-62-61-60 | 50 | 2 |
| B2-B5 | 60-48-49-50-51-52-53-54-55-67 | 24 | 2 |
| B5-Q2 | 67-66-65-64-63-51-37-22-7-8 | 36 | 2 |
| Q2-Q1 | 8-7-6-5-4-3 | 14 | 0 |
| Q1-B1 | 3-4-19-34-48-60-59 | 30 | 2 |
| B1-B4 | 59-47-48-49-50-51-52-64 | 26 | 2 |
| B4-Q2 | 64-63-51-37-22-7-8 | 30 | 2 |
| Q2-B5 | 8-9-24-39-52-53-54-55-67 | 28 | 3 |
| B5-Q1 | 67-66-65-64-63-62-61-60-59-47- 32-17-2-3 | 50 | 2 |
| Q1-Q3 | 3-4-5-6-7-8-9-10-11-12-13 | 28 | 0 |
| Q3-B2 | 13-14-29-44-56-68-67-66-65-64- 63-62-61-60 | 50 | 2 |
| 起终点 | 最短路径 | 行驶 时间/s | 转折数 |
|---|---|---|---|
| B3-Q2 | 63-51-37-22-7-8 | 22 | 1 |
| Q2-B1 | 8-9-24-39-52-64-63-62-61-60-59 | 44 | 2 |
| B1-B5 | 59-47-48-49-50-51-52-53-54-55-67 | 32 | 2 |
| B5-Q2 | 67-66-65-64-63-51-37-22-7-8 | 36 | 2 |
| Q2-B3 | 8-9-24-39-52-64-63 | 30 | 2 |
| B3-Q1 | 63-62-61-60-59-47-32-17-2-3 | 36 | 2 |
| Q1-B4 | 3-4-5-6-7-8-9-24-39-52-64 | 36 | 1 |
| B4-Q3 | 64-52-53-54-41-26-11-12-13 | 28 | 3 |
| Q3-B5 | 13-14-29-44-56-68-67 | 30 | 2 |
| B5-Q1 | 67-66-65-64-63-62-61-60-59-47-32-17-2-3 | 50 | 2 |
| Q1-B2 | 3-4-19-34-48-60 | 22 | 1 |
Tab. 9 Path for AGV5 to complete task
| 起终点 | 最短路径 | 行驶 时间/s | 转折数 |
|---|---|---|---|
| B3-Q2 | 63-51-37-22-7-8 | 22 | 1 |
| Q2-B1 | 8-9-24-39-52-64-63-62-61-60-59 | 44 | 2 |
| B1-B5 | 59-47-48-49-50-51-52-53-54-55-67 | 32 | 2 |
| B5-Q2 | 67-66-65-64-63-51-37-22-7-8 | 36 | 2 |
| Q2-B3 | 8-9-24-39-52-64-63 | 30 | 2 |
| B3-Q1 | 63-62-61-60-59-47-32-17-2-3 | 36 | 2 |
| Q1-B4 | 3-4-5-6-7-8-9-24-39-52-64 | 36 | 1 |
| B4-Q3 | 64-52-53-54-41-26-11-12-13 | 28 | 3 |
| Q3-B5 | 13-14-29-44-56-68-67 | 30 | 2 |
| B5-Q1 | 67-66-65-64-63-62-61-60-59-47-32-17-2-3 | 50 | 2 |
| Q1-B2 | 3-4-19-34-48-60 | 22 | 1 |
| 起终点 | 最短路径 | 行驶时间/s | 转折数 |
|---|---|---|---|
| B6-Q2 | 68-67-66-65-64-63-51-37-22-7-8 | 44 | 2 |
| Q2-Q1 | 8-7-6-5-4-3 | 14 | 0 |
| Q1-B2 | 3-4-19-34-48-60 | 22 | 1 |
| B2-B5 | 60-48-49-50-51-52-53-54-55-67 | 24 | 2 |
| B5-Q2 | 67-66-65-64-63-51-37-22-7-8 | 36 | 2 |
| Q2-Q1 | 8-7-6-5-4-3 | 14 | 0 |
| Q1-B1 | 3-4-19-34-48-60-59 | 30 | 2 |
| B1-B5 | 59-47-48-49-50-51-52-53-54-55-67 | 32 | 2 |
| B5-Q1 | 67-66-65-64-63-62-61-60-59-47-32-17-2-3 | 50 | 2 |
| Q1-B5 | 3-4-5-6-7-8-9-24-39-52-53-54-55-67 | 42 | 3 |
| B5-Q3 | 67-55-42-27-12-13 | 22 | 1 |
| Q3-B6 | 13-14-29-44-56-68 | 22 | 1 |
| B6-Q3 | 68-67-55-42-27-12-13 | 30 | 2 |
Tab. 10 Path for AGV6 to complete task
| 起终点 | 最短路径 | 行驶时间/s | 转折数 |
|---|---|---|---|
| B6-Q2 | 68-67-66-65-64-63-51-37-22-7-8 | 44 | 2 |
| Q2-Q1 | 8-7-6-5-4-3 | 14 | 0 |
| Q1-B2 | 3-4-19-34-48-60 | 22 | 1 |
| B2-B5 | 60-48-49-50-51-52-53-54-55-67 | 24 | 2 |
| B5-Q2 | 67-66-65-64-63-51-37-22-7-8 | 36 | 2 |
| Q2-Q1 | 8-7-6-5-4-3 | 14 | 0 |
| Q1-B1 | 3-4-19-34-48-60-59 | 30 | 2 |
| B1-B5 | 59-47-48-49-50-51-52-53-54-55-67 | 32 | 2 |
| B5-Q1 | 67-66-65-64-63-62-61-60-59-47-32-17-2-3 | 50 | 2 |
| Q1-B5 | 3-4-5-6-7-8-9-24-39-52-53-54-55-67 | 42 | 3 |
| B5-Q3 | 67-55-42-27-12-13 | 22 | 1 |
| Q3-B6 | 13-14-29-44-56-68 | 22 | 1 |
| B6-Q3 | 68-67-55-42-27-12-13 | 30 | 2 |
| 编号 | 冲突对象 | 冲突节点 | 冲突时间/s |
|---|---|---|---|
| 1 | AGV5、AGV2 | 67 | 176、177 |
| 2 | AGV5、AGV2 | 66 | 178、179 |
| 3 | AGV5、AGV2 | 65 | 180、181 |
| 4 | AGV5、AGV2 | 64 | 182、183 |
| 5 | AGV5、AGV2 | 63 | 190、191 |
| 6 | AGV2、AGV6 | 3 | 285 |
| 7 | AGV4、AGV6 | 60 | 353 |
| 8 | AGV4、AGV1 | 64 | 399、400 |
| 9 | AGV4、AGV1 | 63 | 407、408 |
| 10 | AGV4、AGV1 | 51 | 409、410 |
| 11 | AGV4、AGV1 | 37 | 421、422 |
| 12 | AGV4、AGV1 | 22 | 423、424 |
| 13 | AGV4、AGV1 | 7 | 426、425 |
| 14 | AGV4、AGV1 | 8 | 430、429 |
| 15 | AGV6、AGV1 | 64 | 399、400 |
| 16 | AGV6、AGV1 | 63 | 407、408 |
Tab. 11 AGV node conflict time table
| 编号 | 冲突对象 | 冲突节点 | 冲突时间/s |
|---|---|---|---|
| 1 | AGV5、AGV2 | 67 | 176、177 |
| 2 | AGV5、AGV2 | 66 | 178、179 |
| 3 | AGV5、AGV2 | 65 | 180、181 |
| 4 | AGV5、AGV2 | 64 | 182、183 |
| 5 | AGV5、AGV2 | 63 | 190、191 |
| 6 | AGV2、AGV6 | 3 | 285 |
| 7 | AGV4、AGV6 | 60 | 353 |
| 8 | AGV4、AGV1 | 64 | 399、400 |
| 9 | AGV4、AGV1 | 63 | 407、408 |
| 10 | AGV4、AGV1 | 51 | 409、410 |
| 11 | AGV4、AGV1 | 37 | 421、422 |
| 12 | AGV4、AGV1 | 22 | 423、424 |
| 13 | AGV4、AGV1 | 7 | 426、425 |
| 14 | AGV4、AGV1 | 8 | 430、429 |
| 15 | AGV6、AGV1 | 64 | 399、400 |
| 16 | AGV6、AGV1 | 63 | 407、408 |
| 编号 | 冲突对象 | 拥堵路段 | 开始时间/s | 结束时间/s |
|---|---|---|---|---|
| 1 | AGV4、AGV6 | 67-66 | 393 | 395 |
| 2 | AGV4、AGV6 | 66-65 | 395 | 397 |
| 3 | AGV4、AGV6 | 65-64 | 397 | 399 |
| 4 | AGV2、AGV5 | 67-66 | 177 | 178 |
| 5 | AGV2、AGV5 | 66-65 | 179 | 180 |
| 6 | AGV2、AGV5 | 65-64 | 181 | 182 |
Tab. 12 AGV road congestion time table
| 编号 | 冲突对象 | 拥堵路段 | 开始时间/s | 结束时间/s |
|---|---|---|---|---|
| 1 | AGV4、AGV6 | 67-66 | 393 | 395 |
| 2 | AGV4、AGV6 | 66-65 | 395 | 397 |
| 3 | AGV4、AGV6 | 65-64 | 397 | 399 |
| 4 | AGV2、AGV5 | 67-66 | 177 | 178 |
| 5 | AGV2、AGV5 | 66-65 | 179 | 180 |
| 6 | AGV2、AGV5 | 65-64 | 181 | 182 |

Fig. 16 AGV driving paths considering conflict and congestion factors
| 1 | BAE J W, KIM K H. A pooled dispatching strategy for automated guided vehicles in port container terminals[J]. Management Science and Financial Engineering, 2000, 6(2):47-67. |
| 2 | 梁承姬,申哲,张悦. 干扰约束下考虑分组作业面的岸桥AGV联合调度[J]. 计算机工程与应用, 2020, 56(18):254-261. |
| LIANG C J, SHEN Z, ZHANG Y. Quay crane and AGV joint scheduling with grouping work surface under interference constraints[J]. Computer Engineering and Applications, 2020, 56(18):254-261. | |
| 3 | 田宇,周强,朱本飞. 自动化集装箱码头双循环AGV与场桥的集成调度研究[J]. 交通运输系统工程与信息, 2020, 20(4):216-223, 243. |
| TIAN Y, ZHOU Q, ZHU B F. Integrated scheduling of dual-cycle AGV and yard crane at automated container terminal[J]. Journal of Transportation Systems Engineering and Information Technology, 2020, 20(4):216-223, 243. | |
| 4 | 范厚明,郭振峰,岳丽君,等. 考虑能耗节约的集装箱码头双小车岸桥与AGV联合配置及调度优化[J]. 自动化学报, 2021, 47(10): 2412-2426. |
| FAN H M, GUO Z F, YUE L J, et al. Joint configuration and scheduling optimization of dual-trolley quay crane and AGV for container terminal with considering energy saving[J]. Acta Automatica Sinica, 2021, 47(10): 2412-2426. | |
| 5 | LI Z H, YU T, CHEN Y X, et al. Multi-objective optimization dispatching strategy for wind-thermal-storage generation system incorporating temporal and spatial distribution control of air pollutant dispersion[J]. IEEE Access, 2020, 8: 44263-44275. 10.1109/access.2020.2978092 |
| 6 | 韩晓龙,樊加伟. 自动化港口AGV调度配置仿真分析[J]. 重庆交通大学学报(自然科学版), 2016, 35(5):151-154, 164. |
| HAN X L, FAN J W. Analysis of AGV dispatching and configuration simulation of automated container terminals[J]. Journal of Chongqing Jiaotong University (Natural Science), 2016, 35(5):151-154, 164. | |
| 7 | 吴洪明,邹梦艳. 考虑电池电量约束的自动化码头AGV调度[J]. 起重运输机械, 2021(3):47-52. |
| WU H M, ZOU M Y. AGV scheduling of automated terminal considering battery power constraints[J]. Hoisting and Conveying Machinery, 2021(3):47-52. | |
| 8 | 郑亚红,徐玖龙,谢淳. 自动化集装箱码头AGV换电管理与调度优化[J]. 武汉理工大学学报(交通科学与工程版),2021, 45(1):1-6. |
| ZHENG Y H, XU J L, XIE C. Electricity exchange management and scheduling optimization of AGV in automated container terminal[J]. Journal of Wuhan University of Technology (Transportation Science and Engineering), 2021, 45(1):1-6. | |
| 9 | 文家献,魏晨,尹宇起,等. 考虑堆场缓冲区容量的ASC与AGV集成调度[J]. 计算机工程与应用, 2020, 56(11):238-245. |
| WEN J X, WEI C, YIN Y Q, et al. Integrated scheduling of ASC and AGV considering block buffer capacity[J]. Computer Engineering and Applications, 2020, 56(11):238-245. | |
| 10 | 程聪聪,梁承姬,李晔. 自动化集装箱港口考虑AGV伴侣的AGV调度优化问题研究[J]. 计算机应用研究, 2019, 36(8):2349-2354. |
| CHENG C C, LIANG C J, LI Y. Study on AGV scheduling with considering AGV partner in automated container ports[J]. Application Research of Computers, 2019, 36(8):2349-2354. | |
| 11 | 邹裕吉,宋豫川,王馨坤,等. 多目标自适应聚类遗传算法求解无路径冲突的AGV与加工设备集成调度问题[J/OL]. 中国机械工程. (2021-04-28) [2021-05-10].. |
| ZOU Y J, SONG Y C, WANG X K, et al. Multi-objective adaptive clustering genetic algorithm to solve the AGVs and machine integrated scheduling problem without path conflict[J/OL]. China Mechanical Engineering. (2021-04-28) [2021-05-10].. | |
| 12 | 邓希,胡晓兵,江代渝,等. 基于混合遗传算法的柔性作业车间机器和AGV规划[J]. 四川大学学报(自然科学版), 2021, 58(2):73-82. |
| DENG X, HU X B, JIANG D Y, et al. A hybrid GA approach to the scheduling of machines and automated guided vehicles in flexible job shops[J]. Journal of Sichuan University (Natural Science Edition), 2021, 58(2):73-82. | |
| 13 | FANTI M P, MANGINI A M, PEDRONCELLI G, et al. A decentralized control strategy for the coordination of AGV systems[J]. Control Engineering Practice, 2018, 70:86-97. 10.1016/j.conengprac.2017.10.001 |
| 14 | 高一鹭,胡志华. 基于时空网络的自动化集装箱码头自动化导引车路径规划[J]. 计算机应用, 2020, 40(7):2155-2163. |
| GAO Y L, HU Z H. Path planning for automated guided vehicles based on tempo-spatial network at automated container terminal[J]. Journal of Computer Applications, 2020, 40(7):2155-2163. | |
| 15 | 曾庆成,李明泽,薛广顺. 考虑拥堵因素的自动化码头多AGV无冲突动态路径规划模型[J]. 大连海事大学学报, 2019, 45(4):35-44. |
| ZENG Q C, LI M Z, XUE G S. Multiple AGV conflict-free dynamic routing model in automated terminals considering congestion factors[J]. Journal of Dalian Maritime University, 2019, 45(4):35-44. | |
| 16 | 仲美稣,杨勇生. 卸船作业模式下自动化码头AGV路径仿真优化[J].水运工程, 2018(4):122-127. 10.3969/j.issn.1002-4972.2018.04.022 |
| ZHONG M S, YANG Y S. Based on discharging operation mode automation terminal of AGV path simulation optimization[J]. Port and Waterway Engineering, 2018(4):122-127. 10.3969/j.issn.1002-4972.2018.04.022 | |
| 17 | XIN J B, NEGENBORN R R, LODEWIJKS G. Trajectory planning for AGVs in automated container terminals using avoidance constraints: a case study[J]. IFAC Proceedings Volumes, 2014, 47(3):9828-9833. 10.3182/20140824-6-za-1003.01306 |
| 18 | NISHI T, HIRANAKA Y, GROSSMANN I E. A bilevel decomposition algorithm for simultaneous production scheduling and conflict-free routing for automated guided vehicles[J]. Computers and Operations Research, 2011, 38(5): 876-888. 10.1016/j.cor.2010.08.012 |
| 19 | FAZLOLLAHTABAR H, SAIDI-MEHRABAD M, MASEHIAN E. Mathematical model for deadlock resolution in multiple AGV scheduling and routing network: a case study[J]. Industrial Robot, 2015, 42(3): 252-263. 10.1108/ir-12-2014-0437 |
| 20 | SAIDI-MEHRABAD M, DEHNAVI-ARANI S, EVAZABADIAN F, et al. An Ant Colony Algorithm (ACA) for solving the new integrated model of job shop scheduling and conflict-free routing of AGVs[J]. Computers and Industrial Engineering, 2015, 86:2-13. 10.1016/j.cie.2015.01.003 |
| 21 | MIYAMOTO T, INOUE K. Local and random searches for dispatch and conflict-free routing problem of capacitated AGV systems[J]. Computers and Industrial Engineering, 2016, 91:1-9. 10.1016/j.cie.2015.10.017 |
| 22 | YANG Y S, ZHONG M S, DESSOUKY Y, et al. An integrated scheduling method for AGV routing in automated container terminals[J]. Computers and Industrial Engineering, 2018, 126:482-493. 10.1016/j.cie.2018.10.007 |
| 23 | ZHONG M S, YANG Y S, DESSOUKY Y, et al. Multi-AGV scheduling for conflict-free path planning in automated container terminals[J]. Computers and Industrial Engineering, 2020, 142: No.106371. 10.1016/j.cie.2020.106371 |
| 24 | 吴聪,陈侃松,姚静. 基于改进自适应遗传算法的物流配送路径优化研究[J]. 计算机测量与控制, 2018, 26(2):236-240. |
| WU C, CHEN K S, YAO J. Study on optimization of logistics distribution route based on improved adaptive genetic algorithm[J]. Computer Measurement and Control, 2018, 26(2):236-240. | |
| 25 | 张素云,杨勇生,梁承姬,等. 自动化码头多AGV路径冲突的优化控制研究[J]. 交通运输系统工程与信息, 2017, 17(2):83-89. |
| ZHANG S Y, YANG Y S, LIANG C J, et al. Optimal control of multiple AGV path conflict in automated terminals[J]. Journal of Transportation Systems Engineering and Information Technology, 2017, 17(2):83-89. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||