


Journal of Computer Applications ›› 2022, Vol. 42 ›› Issue (1): 252-257.DOI: 10.11772/j.issn.1001-9081.2021010175
• Multimedia computing and computer simulation • Previous Articles
Rui ZHANG, Qizhi ZHANG( ), Yali ZHOU
), Yali ZHOU
Received:2021-01-29
Revised:2021-07-09
Accepted:2021-08-02
Online:2022-01-11
Published:2022-01-10
Contact:
Qizhi ZHANG
About author:ZHANG Rui, born in 1995, M. S. candidate. His research interests include bipedal robot control.Supported by:通讯作者:
张奇志
作者简介:张瑞(1995—),男,河北衡水人,硕士研究生,主要研究方向:双足机器人控制基金资助:CLC Number:
Rui ZHANG, Qizhi ZHANG, Yali ZHOU. Starting and walking human-like control of semi-passive bipedal robot with variable length telescopic legs[J]. Journal of Computer Applications, 2022, 42(1): 252-257.
张瑞, 张奇志, 周亚丽. 变长度弹性伸缩腿双足机器人半被动起步行走仿人控制[J]. 《计算机应用》唯一官方网站, 2022, 42(1): 252-257.
Add to citation manager EndNote|Ris|BibTeX
URL: http://www.joca.cn/EN/10.11772/j.issn.1001-9081.2021010175

Fig. 1 Bipedal robot named Sun Robot
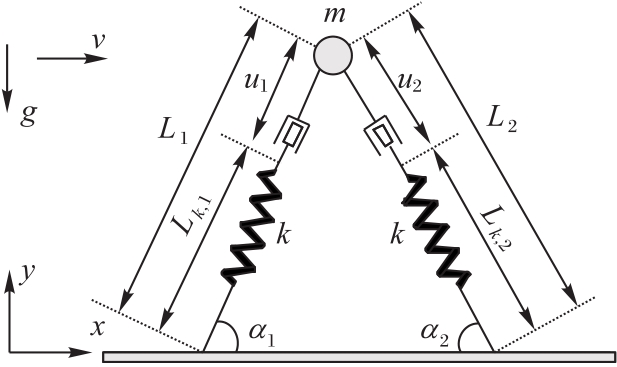
Fig. 2 Model of bipedal robot
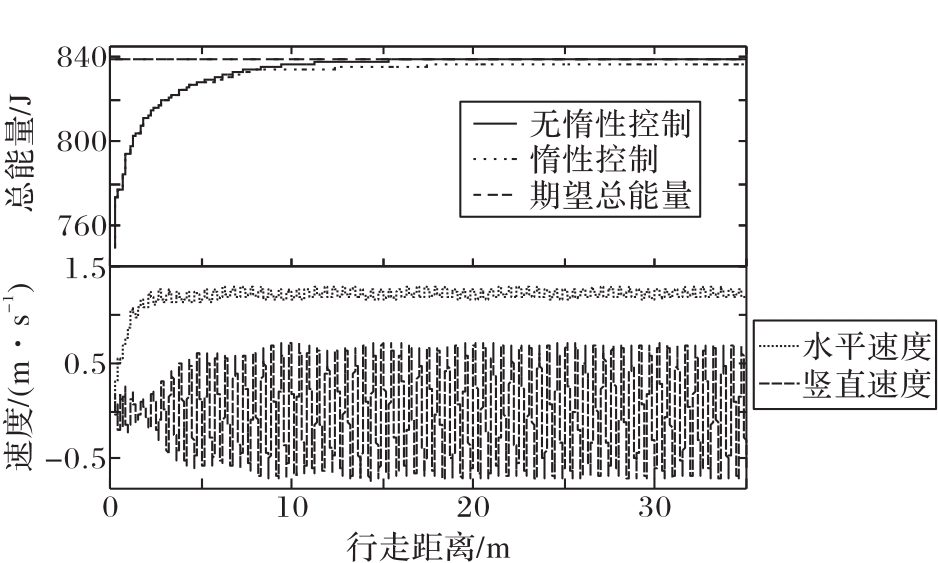
Fig. 3 Curves of total energy and speed varying with walking distance without disturbance
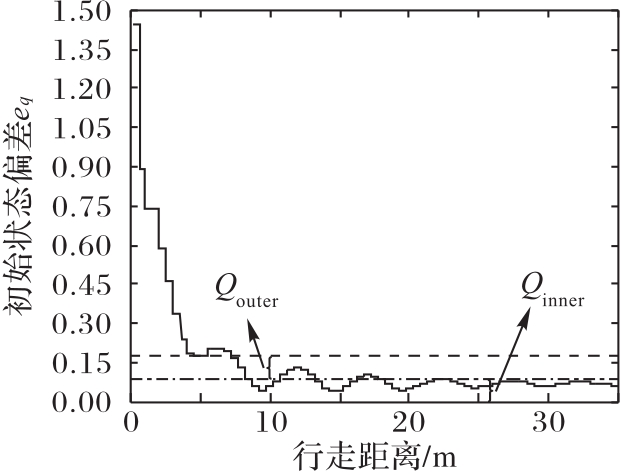
Fig. 4 Curve of system initial state error varying with walking distance without disturbance
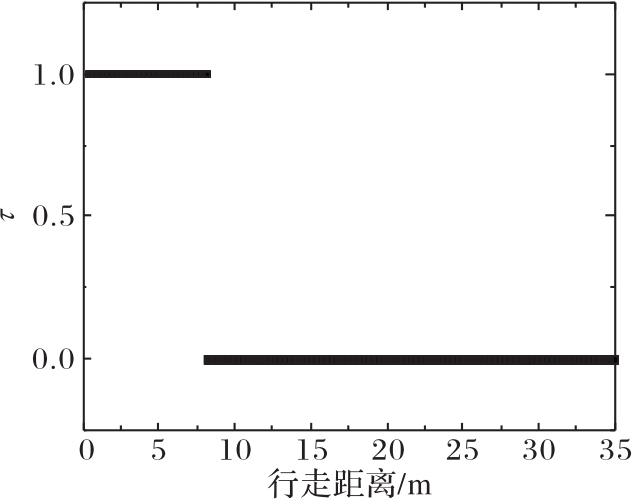
Fig. 5 Curve of τ value varying with walking distance without disturbance
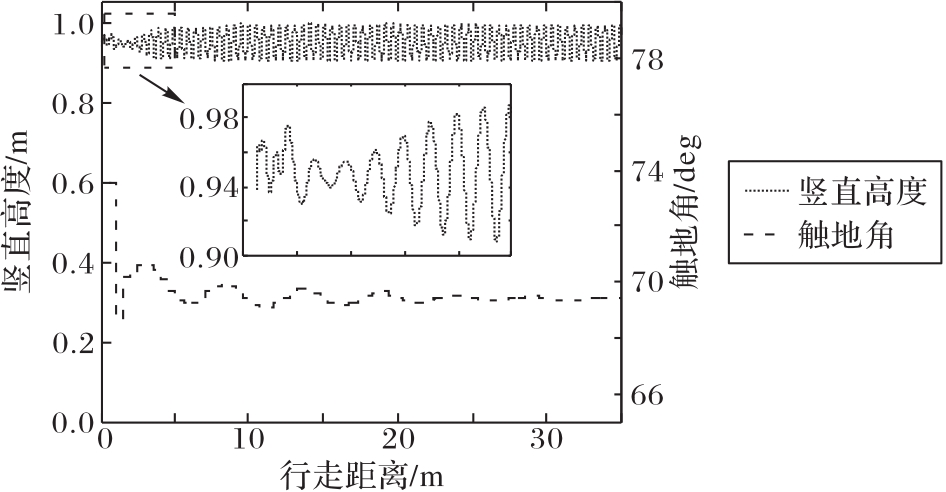
Fig. 6 Curves of hip joint height and touch-down angle varying with walking distance without disturbance
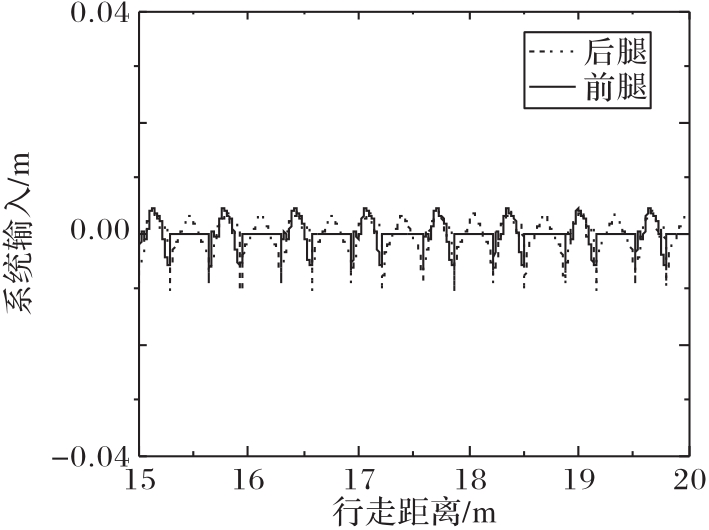
Fig. 7 System input of robot in stable walking stage in reference [13]
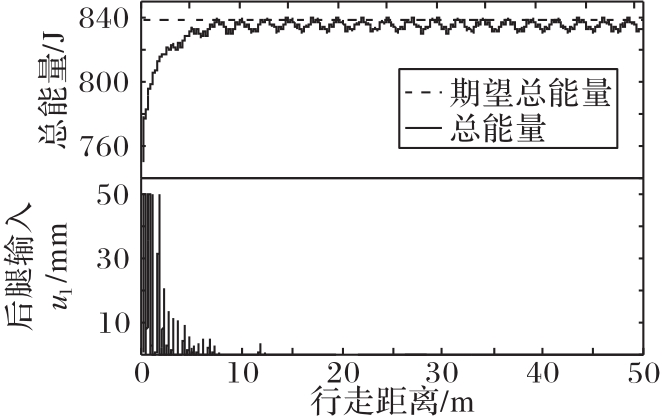
Fig.8 Curves of total energy and input varying with walking distance with disturbance
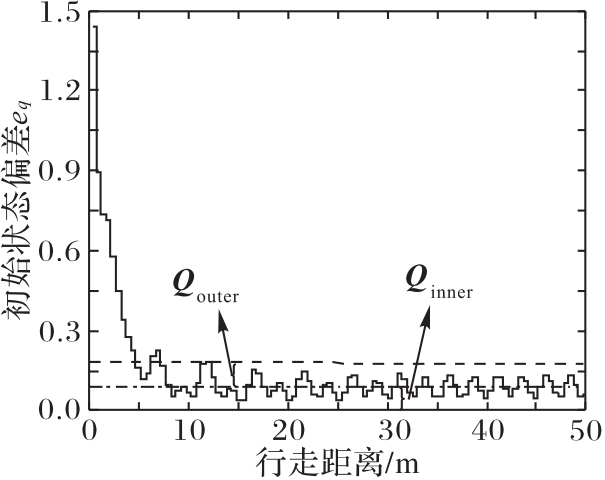
Fig. 9 Curve of initial state error varying with walking distance with disturbance
| 1 | HIRAI K, HIROSE M, HAIKAWA Y, et al. The development of Honda humanoid robot[C]// Proceedings of the 1998 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 1998: 1321-1326. 10.1109/robot.1998.677288 |
| 2 | WESTERVELT E R, BUCHE G, GRIZZLE J W. Experimental validation of a framework for the design of controllers that induce stable walking in planar bipeds[J]. The International Journal of Robotics Research, 2004, 23(6): 559-582. 10.1177/0278364904044410 |
| 3 | McGEER T. Passive dynamic walking[J]. The International Journal of Robotics Research, 1990, 9(2): 62-82. 10.1177/027836499000900206 |
| 4 | 张奇志,周亚丽. 双足机器人半被动行走固定点全局稳定性分析[J]. 工程力学, 2013, 30(3): 431-436. 10.6052/j.issn.1000-4750.2011.10.0674 |
| ZHANG Q Z, ZHOU Y L. Global stability analysis for the fixed point of semi-passive biped robot walking[J]. Engineering Mechanics, 2013, 30(3): 431-436. 10.6052/j.issn.1000-4750.2011.10.0674 | |
| 5 | 付成龙,黄元林,王健美,等. 半被动双足机器人的准开环控制[J]. 机器人, 2009, 31(2): 110-117, 123. 10.3321/j.issn:1002-0446.2009.02.003 |
| FU C L, HUANG Y L, WANG J M, et al. Quasi open-loop control for semi-passive biped robots[J]. Robot, 2009, 31(2): 110-117, 123. 10.3321/j.issn:1002-0446.2009.02.003 | |
| 6 | GEYER H, SEYFARTH A, BLICKHAN R. Compliant leg behaviour explains basic dynamics of walking and running[J]. Proceedings of the Royal Society B, 2006, 273(1603): 2861-2867. 10.1098/rspb.2006.3637 |
| 7 | GAROFALO G, OTT C, ALBU-SCHÄFFER A. Walking control of fully actuated robots based on the Bipedal SLIP model[C]// Proceedings of the 2012 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2012: 1456-1463. 10.1109/icra.2012.6225272 |
| 8 | REZAZADEH S, HUBICKI C, JONES M, et al. Spring-mass walking with ATRIAS in 3D: robust gait control spanning zero to 4.3 KPH on a heavily underactuated bipedal robot[C]// Proceedings of the ASME 2015 Dynamic Systems and Control Conference. New York: ASME, 2015: No.DSCC2015-9899. 10.1115/dscc2015-9899 |
| 9 | DADASHZADEH B, MACNAB C J B. SLIP-based control of bipedal walking based on two-level control strategy[J]. Robotica, 2019, 38(8): 1434-1449. 10.1017/s0263574719001553 |
| 10 | 赵玉婷,韩宝玲,罗庆生. 基于deep Q-network双足机器人非平整地面行走稳定性控制方法[J]. 计算机应用, 2018, 38(9): 2459-2463. 10.11772/j.issn.1001-9081.2018030714 |
| ZHAO Y T, HAN B L, LUO Q S. Walking stability control method based on deep Q-network for biped robot on uneven ground[J]. Journal of Computer Applications, 2018, 38(9): 2459-2463. 10.11772/j.issn.1001-9081.2018030714 | |
| 11 | SUZUKI S, PAN Y D, FURUTA K. Walking control by chattering-free VS servo using passive walking trajectory[J]. International Journal of Control, 2003, 76(9/10): 1034-1046. 10.1080/0020717031000098985 |
| 12 | McMAHON T A. Mechanics of locomotion[J]. The International Journal of Robotics Research, 1984, 3(2): 4-28. 10.1177/027836498400300202 |
| 13 | 宋嘉琦,张奇志,周亚丽. 变长度弹性伸缩腿双足机器人动力学与控制[J]. 力学季刊, 2019, 40(2): 235-242. |
| SONG J Q, ZHANG Q Z, ZHOU Y L. Dynamcis and control of bipedal robot with variable length telescopic legs[J]. Chinese Quarterly of Mechanics, 2019, 40(2): 235-242. | |
| 14 | RUMMEL J, BLUM Y, MAUS H M, et al. Stable and robust walking with compliant legs[C]// Proceedings of the 2010 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2010: 5250-5255. 10.1109/robot.2010.5509500 |
| 15 | SUZUKI S, FURUTA K, PAN Y D, et al. Lazy VS-control strategy for passive walking[C]// Proceedings of the 40th IEEE Conference on Decision and Control. Piscataway: IEEE, 2001:1392-1397. 10.1109/cdc.2001.981085 |
| 16 | SUZUKI S, FURUTA K, HATAKEYAMA S. Lazy control strategy for active passive walking[C]// Proceedings of the 27th Annual Conference of the IEEE Industrial Electronics Society. Piscataway: IEEE, 2001: 305-310. 10.1109/iecon.2001.976499 |
| 17 | SEYFARTH A, GEYER H, GÜNTHER M, et al. A movement criterion for running[J]. Journal of Biomechanics, 2002, 35(5): 649-655. 10.1016/s0021-9290(01)00245-7 |
| 18 | SEYFARTH A, GEYER H, HERR H. Swing-leg retraction: a simple control model for stable running[J]. Journal of Experimental Biology, 2003, 206(15): 2547-2555. 10.1242/jeb.00463 |
| 19 | PIOVAN G, BYL K. Approximation and control of the SLIP model dynamics via partial feedback linearization and two-element leg actuation strategy[J]. IEEE Transactions on Robotics, 2016, 32(2): 399-412. 10.1109/tro.2016.2529649 |
| [1] | . Simultaneous localization and mapping for mobile robot based on WiFi fingerprint sequence matching [J]. Journal of Computer Applications, 0, (): 0-0. |
| [2] | . Decoupled visual servoing method with point and line features [J]. Journal of Computer Applications, 0, (): 0-0. |
| [3] | ZHENG Sicheng, KONG Linghua, YOU Tongfei, YI Dingrong. Semantic SLAM algorithm based on deep learning in dynamic environment [J]. Journal of Computer Applications, 2021, 41(10): 2945-2951. |
| [4] | HUANG Juting, GAO Hongli, DAI Zhikun. Semantic segmentation method of power line on mobile terminals based on encoder-decoder structure [J]. Journal of Computer Applications, 2021, 41(10): 2952-2958. |
| [5] | ZHENG Liping, WANG Jianqiang, ZHANG Yuzhao, DONG Zuofan. Vehicle number optimization approach of autonomous vehicle fleet driven by multi-spatio-temporal distribution task [J]. Journal of Computer Applications, 2021, 41(5): 1406-1411. |
| [6] | LUAN Jianing, ZHANG Wei, SUN Wei, ZHANG Ao, HAN Dong. High-accuracy localization algorithm based on fusion of two-dimensional code vision and laser lidar [J]. Journal of Computer Applications, 2021, 41(5): 1484-1491. |
| [7] | LIANG Zhen, FANG Tiyu, LI Jinping. Precise visual navigation method for agricultural robot based on virtual navigation line [J]. Journal of Computer Applications, 2021, 41(1): 191-198. |
| [8] | XU Xiaoqiang, WANG Mingyong, MAO Yan. Path planning of mobile robot based on improved artificial potential field method [J]. Journal of Computer Applications, 2020, 40(12): 3508-3512. |
| [9] | ZHAO Hong, LIU Xiangdong, YANG Yongjuan. Indoor robot simultaneous localization and mapping based on RGB-D image [J]. Journal of Computer Applications, 2020, 40(12): 3637-3643. |
| [10] | XI Zhihong, WANG Hongxu, HAN Shuangquan. Fast mismatch elimination algorithm and map-building based on ORB-SLAM2 system [J]. Journal of Computer Applications, 2020, 40(11): 3289-3294. |
| [11] | QI Xuanxuan, HUANG Jiajun, CAO Jian'an. Path planning for unmanned vehicle based on improved A* algorithm [J]. Journal of Computer Applications, 2020, 40(7): 2021-2027. |
| [12] | Fei LUO, Pengfei LIU, Yuan LUO, Simeng ZHU. Motor imagery EEG feature extraction method based on multi-feature fusion [J]. Journal of Computer Applications, 2020, 40(2): 616-620. |
| [13] | XI Zhihong, HAN Shuangquan, WANG Hongxu. Simultaneous localization and semantic mapping of indoor dynamic scene based on semantic segmentation [J]. Journal of Computer Applications, 2019, 39(10): 2847-2851. |
| [14] | FU Jiupeng, ZENG Guohui, HUANG Bo, FANG Zhijun. Narrow channel path planning based on bidirectional rapidly-exploring random tree [J]. Journal of Computer Applications, 2019, 39(10): 2865-2869. |
| [15] | HUANG Chao, LIANG Shengtao, ZHANG Yi, ZHANG Jie. Path planning of mobile robot based on multi-objective grasshopper optimization algorithm [J]. Journal of Computer Applications, 2019, 39(10): 2859-2864. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||