


Journal of Computer Applications ›› 2022, Vol. 42 ›› Issue (8): 2556-2563.DOI: 10.11772/j.issn.1001-9081.2021071178
Special Issue: 多媒体计算与计算机仿真
• Multimedia computing and computer simulation • Previous Articles Next Articles
Received:2021-07-07
Revised:2021-10-11
Accepted:2021-10-13
Online:2021-11-09
Published:2022-08-10
Contact:
Xiaoke QI
About author:LU Jinyan, born in 1985, Ph. D., lecturer. Her research interests include robot control, intelligent control, signal processing, machine learning.Supported by:
卢金燕1, 戚肖克2( )
)
通讯作者:
戚肖克
作者简介:卢金燕(1985—),女,河南信阳人,讲师,博士,CCF会员,主要研究方向:机器人控制、智能控制、信号处理、机器学习;基金资助:CLC Number:
Jinyan LU, Xiaoke QI. Decoupled visual servoing control method based on point and line features[J]. Journal of Computer Applications, 2022, 42(8): 2556-2563.
卢金燕, 戚肖克. 基于点线特征的解耦视觉伺服控制方法[J]. 《计算机应用》唯一官方网站, 2022, 42(8): 2556-2563.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2021071178
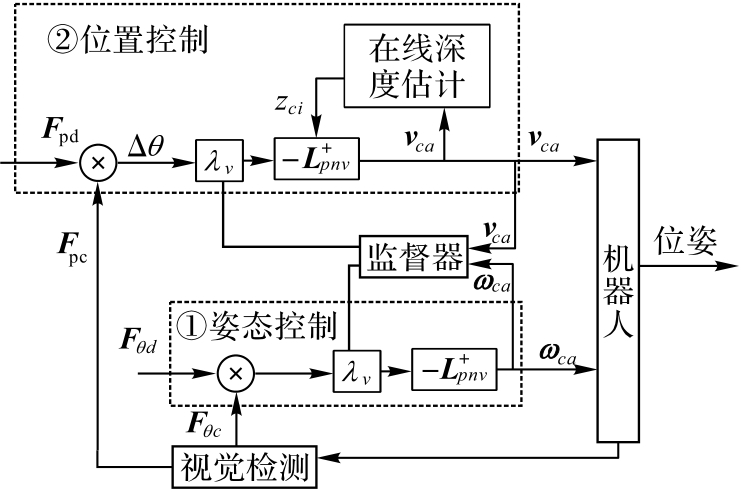
Fig. 1 Block diagram of the proposed control system

Fig. 2 Eye-in-Hand robot platform
| 直线编号 | ρ/mm | θ/(°) |
|---|---|---|
| 直线1 | 0.216 5 | -90.96 |
| 直线2 | 0.333 0 | -1.23 |
| 直线3 | 0.140 1 | 88.78 |
| 直线4 | 0.251 7 | 179.43 |
Tab. 1 Expectedd values for lines
| 直线编号 | ρ/mm | θ/(°) |
|---|---|---|
| 直线1 | 0.216 5 | -90.96 |
| 直线2 | 0.333 0 | -1.23 |
| 直线3 | 0.140 1 | 88.78 |
| 直线4 | 0.251 7 | 179.43 |
| 角点编号 | x1c /mm | y1c /mm |
|---|---|---|
| 点A | -0.253 8 | -0.212 3 |
| 点B | 0.328 3 | -0.222 0 |
| 点C | 0.335 9 | 0.133 0 |
| 点D | -0.250 3 | 0.145 5 |
Tab. 2 Expected values for points
| 角点编号 | x1c /mm | y1c /mm |
|---|---|---|
| 点A | -0.253 8 | -0.212 3 |
| 点B | 0.328 3 | -0.222 0 |
| 点C | 0.335 9 | 0.133 0 |
| 点D | -0.250 3 | 0.145 5 |

Fig. 3 Angle errors of four edges
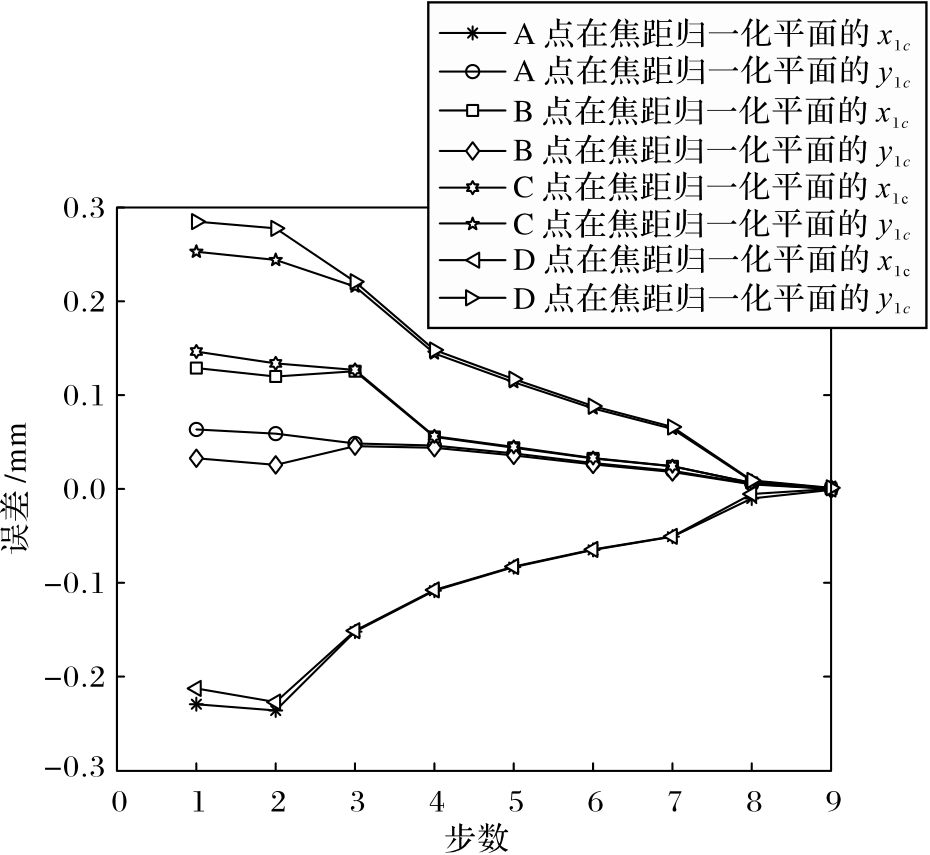
Fig. 4 Errors of four points on focal length normalization plane
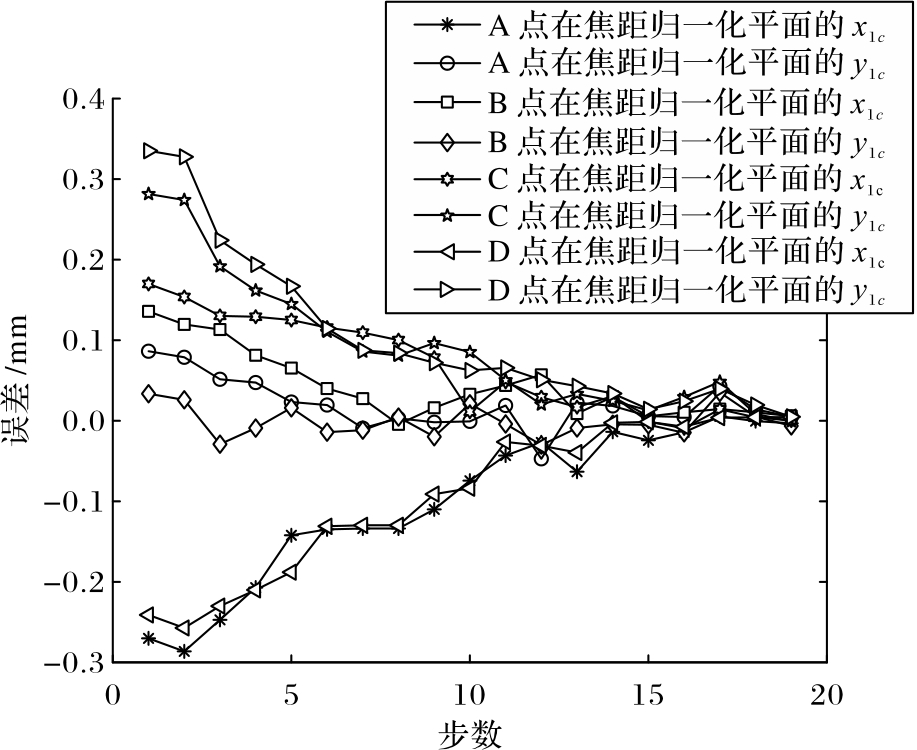
Fig. 5 Errors of four points on focal length normalization plane for traditional IBVS method
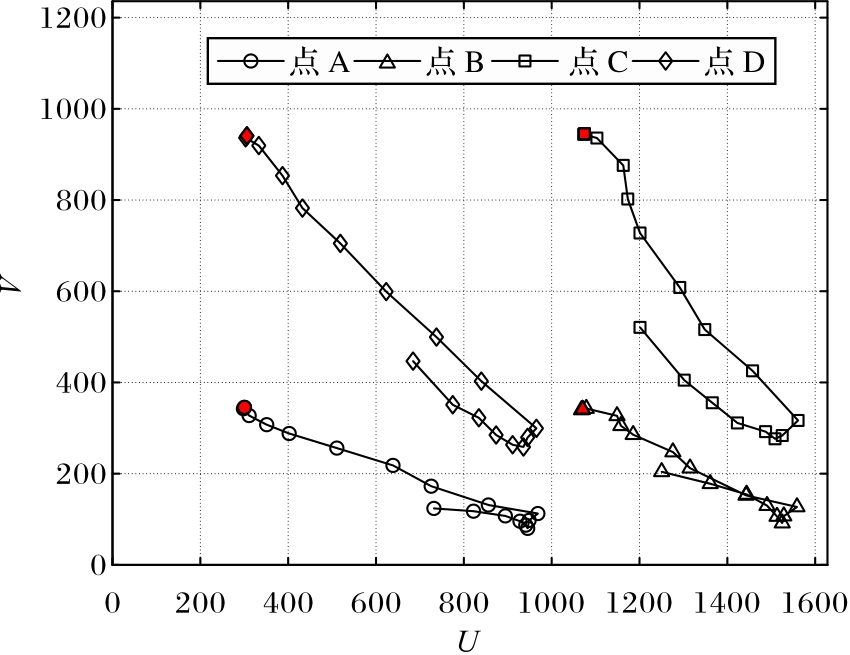
Fig. 6 Feature point trajectories by using the proposed method
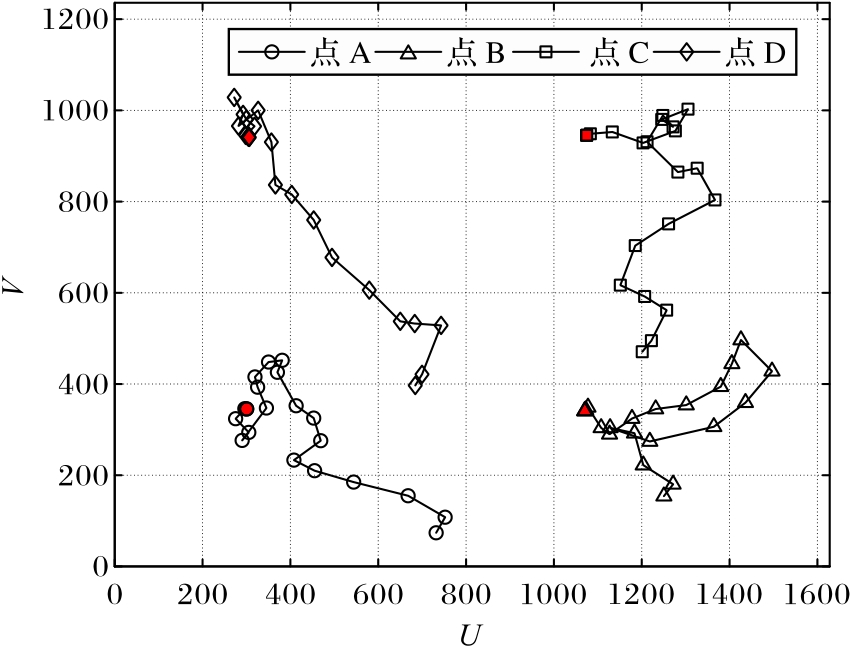
Fig. 7 Feature point trajectories by using traditional IBVS method
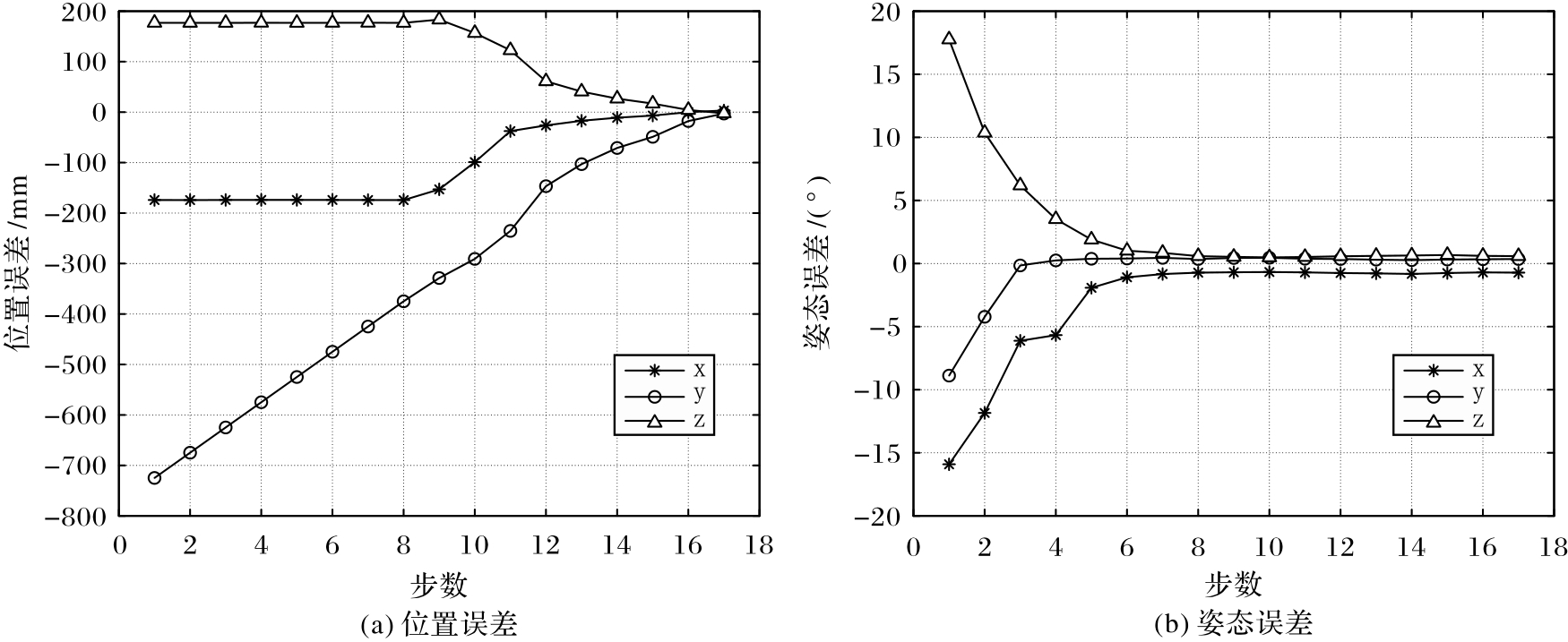
Fig. 8 Position and pose changes of end-effector of robot by using the proposed method

Fig. 9 Position and pose changes of end-effector of robot by using traditional IBVS method
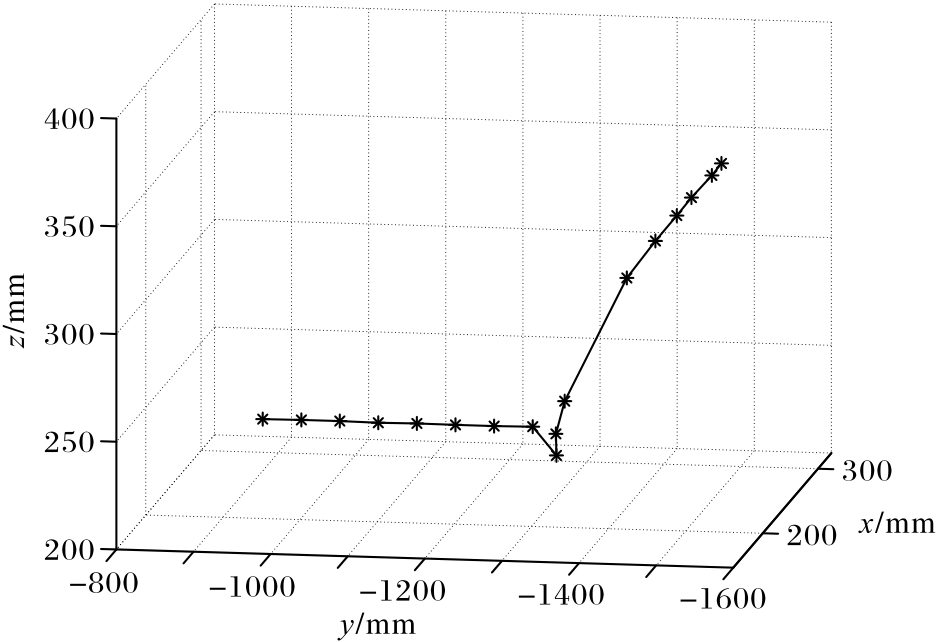
Fig. 10 End-effector trajectory of robot by using the proposed method
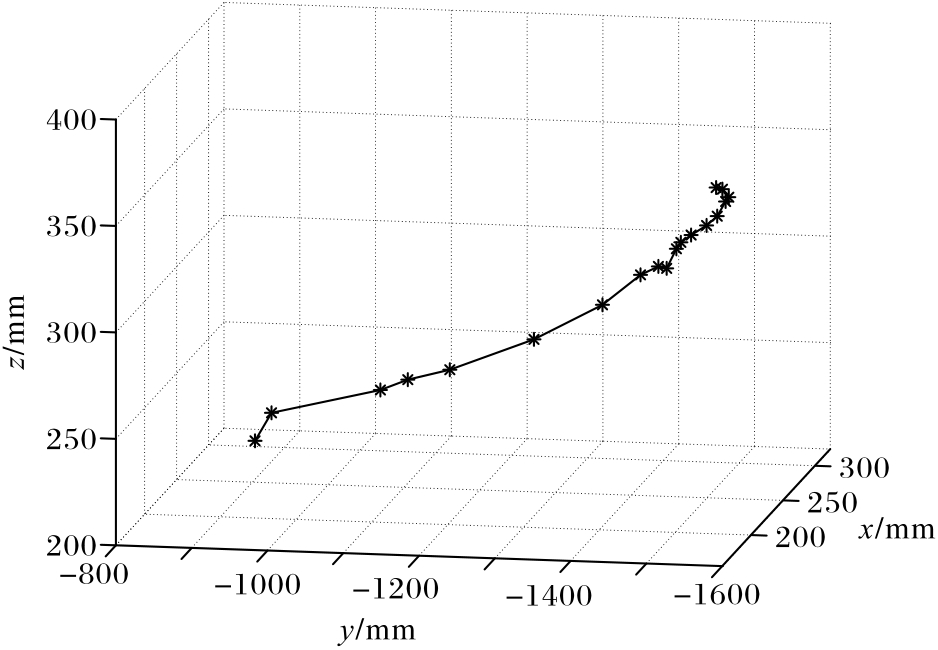
Fig. 11 End-effector trajectory of robot by using traditional IBVS method
| 视觉伺服方法 | x/mm | y/mm | z/mm | rx/(°) | ry/(°) | rz/(°) |
|---|---|---|---|---|---|---|
| 本文方法 | 3.26 | 1.82 | 2.05 | -0.72 | 0.37 | -0.52 |
| 传统IBVS方法 | -4.72 | 5.06 | -7.35 | -1.26 | 0.53 | -0.78 |
Tab. 3 Attitude deviation of end-effector of robot after alignment
| 视觉伺服方法 | x/mm | y/mm | z/mm | rx/(°) | ry/(°) | rz/(°) |
|---|---|---|---|---|---|---|
| 本文方法 | 3.26 | 1.82 | 2.05 | -0.72 | 0.37 | -0.52 |
| 传统IBVS方法 | -4.72 | 5.06 | -7.35 | -1.26 | 0.53 | -0.78 |
| 1 | CHEN S Y, LI Y F, KWOK N M. Active vision in robotic systems: a survey of recent developments[J]. The International Journal of Robotics Research, 2011, 30(11): 1343-1377. 10.1177/0278364911410755 |
| 2 | SHI H B, SUN G, WANG Y P, et al. Adaptive image-based visual servoing with temporary loss of the visual signal[J]. IEEE Transactions on Industrial Informatics, 2019, 15(4): 1956-1965. 10.1109/tii.2018.2865004 |
| 3 | CAO Z Q, CHEN X C, YU Y Y, et al. Image dynamics-based visual servoing for quadrotors tracking a target with a nonlinear trajectory observer[J]. IEEE Transactions on System, Man, and Cybernetics: Systems, 2020, 50(1): 376-384. 10.1109/tsmc.2017.2720173 |
| 4 | SALEHI I, ROTITHOR G, SALTUS R, et al. Constrained image-based visual servoing using barrier functions [C]// Proceedings of the 2021 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2021: 14254-14260. 10.1109/icra48506.2021.9560983 |
| 5 | LIANG X W, WANG H S, LIU Y H, et al. Formation control of nonholonomic mobile robots without position and velocity measurements[J]. IEEE Transactions on Robotics, 2018, 34(2): 434-446. 10.1109/tro.2017.2776304 |
| 6 | WANG H S, YANG B H, LIU Y T, et al. Visual servoing of soft robot manipulator in constrained environments with an adaptive controller[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(1): 41-50. 10.1109/tmech.2016.2613410 |
| 7 | ZHENG D L, WANG H S, WANG J C, et al. Image-based visual servoing of a quadrotor using virtual camera approach[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(2): 972-982. 10.1109/tmech.2016.2639531 |
| 8 | AGRAVANTE D J, CHAUMETTE F. Active vision for pose estimation applied to singularity avoidance in visual servoing [C]// Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2017: 2947-2952. 10.1109/iros.2017.8206129 |
| 9 | ZHANG K X, CHEN J, LI Y, et al. Visual tracking and depth estimation of mobile robots without desired velocity information[J]. IEEE Transactions on Cybernetics, 2020, 50(1): 361-373. 10.1109/tcyb.2018.2869623 |
| 10 | LI J N, XIE H, LOW K H, et al. Image-based visual servoing of rotorcrafts to planar visual targets of arbitrary orientation[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 7861-7868. 10.1109/lra.2021.3101878 |
| 11 | ESPIAU B, CHAUMETTE F, RIVES P. A new approach to visual servoing in robotics[J]. IEEE Transactions on Robotics and Automation, 1992, 8(3): 313-326. 10.1109/70.143350 |
| 12 | 徐德,卢金燕.直线特征的交互矩阵求取[J].自动化学报, 2015, 41(10): 1762-1771. 10.16383/j.aas.2015.c150097 |
| XU D, LU J Y. Determination for interactive matrix of line feature[J]. Acta Automatica Sinica, 2015, 41(10): 1762-1771. 10.16383/j.aas.2015.c150097 | |
| 13 | XU C, ZHANG L L, CHENG L, et al. Pose estimation from line correspondences: a complete analysis and a series of solutions[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1209-1222. 10.1109/tpami.2016.2582162 |
| 14 | ZHANG G X, LEE J H, LIM J, et al. Building a 3-D line-based map using stereo SLAM[J]. IEEE Transaction on Robotics, 2015, 31(6): 1364-1377. 10.1109/tro.2015.2489498 |
| 15 | ZHOU H Z, ZOU D P, PEI L, et al. StructSLAM: visual SLAM with building structure lines[J]. IEEE Transactions on Vehicular Technology, 2015, 64(4): 1364-1375. 10.1109/tvt.2015.2388780 |
| 16 | MATEUS A, TAHRI O, MIRALDO P. Active estimation of 3D lines in spherical coordinates [C]// Proceedings of the 2019 American Control Conference. Piscataway: IEEE, 2019: 3950-3955. 10.23919/acc.2019.8814938 |
| 17 | DE FARIAS C, ADJIGBLE M, TAMADAZTE B, et al. Dual quaternion-based visual servoing for grasping moving objects [C]// Proceedings of the IEEE 17th International Conference on Automation Science and Engineering. Piscataway: IEEE, 2021: 151-158. 10.1109/case49439.2021.9551631 |
| 18 | FU Q, YU H S, LAI L H, et al. A robust RGB-D SLAM system with points and lines for low texture indoor environments[J]. IEEE Sensors Journal, 2019, 19(21): 9908-9920. 10.1109/jsen.2019.2927405 |
| 19 | PUMAROLA A, VAKHITOV A, AGUDO A, et al. PL-SLAM: real-time monocular visual SLAM with points and lines [C]// Proceedings of the 2017 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2017: 4503-4508. 10.1109/icra.2017.7989522 |
| 20 | HE Y J, ZHAO J, GUO Y, et al. PL-VIO: tightly-coupled monocular visual-inertial odometry using point and line features[J]. Sensors, 2018, 18(4): No.1159. 10.3390/s18041159 |
| 21 | WANG R Z, DI K C, WAN W H, et al. Improved point-line feature based visual SLAM method for indoor scenes[J]. Sensors, 2018, 18(10): No.3559. 10.3390/s18103559 |
| 22 | HUANG S S, MA Z Y, MU T J, et al. Lidar-monocular visual odometry using point and line features [C]// Proceedings of the 2020 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2020: 1091-1097. 10.1109/icra40945.2020.9196613 |
| 23 | WANG R H, ZHANG X B, FANG Y C, et al. Virtual-goal-guided RRT for visual servoing of mobile robots with FOV constraint[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(4): 2073-2083. 10.1109/tsmc.2020.3044347 |
| [1] | . The SLAM Algorithm Based on Point-Line Features and Multi-IMU Fusion [J]. Journal of Computer Applications, 0, (): 0-0. |
| [2] | Enbao QIAO, Xiangyang GAO, Jun CHENG. Self-recovery adaptive Monte Carlo localization algorithm based on support vector machine [J]. Journal of Computer Applications, 2024, 44(10): 3246-3251. |
| [3] | Haodong HE, Hao FU, Qiang WANG, Shuai ZHOU, Wei LIU. Multi-robot path following and formation based on deep reinforcement learning [J]. Journal of Computer Applications, 2024, 44(8): 2626-2633. |
| [4] | WANG Caiqi, CUI Xining, XIONG Yi, WU Shiqian. Adaptive extended RRT* path planning algorithm based on node-to-obstacle distance [J]. Journal of Computer Applications, 0, (): 0-0. |
| [5] | Chao GE, Jiabin ZHANG, Lei WANG, Zhixin LUN. Trajectory planning for autonomous vehicles based on model predictive control [J]. Journal of Computer Applications, 2024, 44(6): 1959-1964. |
| [6] | . Dynamic VSLAM algorithm incorporating object detection and feature point association [J]. Journal of Computer Applications, 0, (): 0-0. |
| [7] | Yuanchao LI, Chongben TAO, Chen WANG. Gait control method based on maximum entropy deep reinforcement learning for biped robot [J]. Journal of Computer Applications, 2024, 44(2): 445-451. |
| [8] | Tianzouzi XIAO, Xiaobo ZHOU, Xin LUO, Qipeng TANG. Robust RGB-D SLAM system incorporating instance segmentation and clustering in dynamic environment [J]. Journal of Computer Applications, 2023, 43(4): 1220-1225. |
| [9] | Jinyue LIU, Huiyu LI, Xiaohui JIA, Jiarui LI. Dynamic gait recognition method based on human model constraints [J]. Journal of Computer Applications, 2023, 43(3): 972-977. |
| [10] | Zhenghong QIN, Ran LIU, Yufeng XIAO, Kaixiang CHEN, Zhongyuan DENG, Tianrui DENG. Simultaneous localization and mapping for mobile robots based on WiFi fingerprint sequence matching [J]. Journal of Computer Applications, 2022, 42(10): 3268-3274. |
| [11] | Zhihong XI, Jiaxu WEN. Indoor dynamic scene localization and mapping based on target detection [J]. Journal of Computer Applications, 2022, 42(9): 2853-2857. |
| [12] | Gaofeng PAN, Yuan FAN, Yu RU, Yuchao GUO. Low-texture monocular visual simultaneous localization and mapping algorithm based on point-line feature fusion [J]. Journal of Computer Applications, 2022, 42(7): 2170-2176. |
| [13] | Rui ZHANG, Qizhi ZHANG, Yali ZHOU. Starting and walking human-like control of semi-passive bipedal robot with variable length telescopic legs [J]. Journal of Computer Applications, 2022, 42(1): 252-257. |
| [14] | ZHENG Sicheng, KONG Linghua, YOU Tongfei, YI Dingrong. Semantic SLAM algorithm based on deep learning in dynamic environment [J]. Journal of Computer Applications, 2021, 41(10): 2945-2951. |
| [15] | HUANG Juting, GAO Hongli, DAI Zhikun. Semantic segmentation method of power line on mobile terminals based on encoder-decoder structure [J]. Journal of Computer Applications, 2021, 41(10): 2952-2958. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||