


Journal of Computer Applications ›› 2021, Vol. 41 ›› Issue (11): 3242-3250.DOI: 10.11772/j.issn.1001-9081.2021020327
Special Issue: 人工智能
• Artificial intelligence • Previous Articles Next Articles
Received:2021-03-05
Revised:2021-04-15
Accepted:2021-04-20
Online:2021-04-29
Published:2021-11-10
Contact:
Yuan ZHU
About author:GAO Jie,born in 1996,M. S. candidate. Her research interests
include multi-sensor fusion,multi-object tracking,object detection
高洁1, 朱元2( ), 陆科2
), 陆科2
通讯作者:
朱元
作者简介:高洁(1996—),女,贵州六盘水人,硕士研究生,主要研究方向:多传感器融合、多目标跟踪、目标检测CLC Number:
Jie GAO, Yuan ZHU, Ke LU. Object detection method based on radar and camera fusion[J]. Journal of Computer Applications, 2021, 41(11): 3242-3250.
高洁, 朱元, 陆科. 基于雷达和相机融合的目标检测方法[J]. 《计算机应用》唯一官方网站, 2021, 41(11): 3242-3250.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2021020327
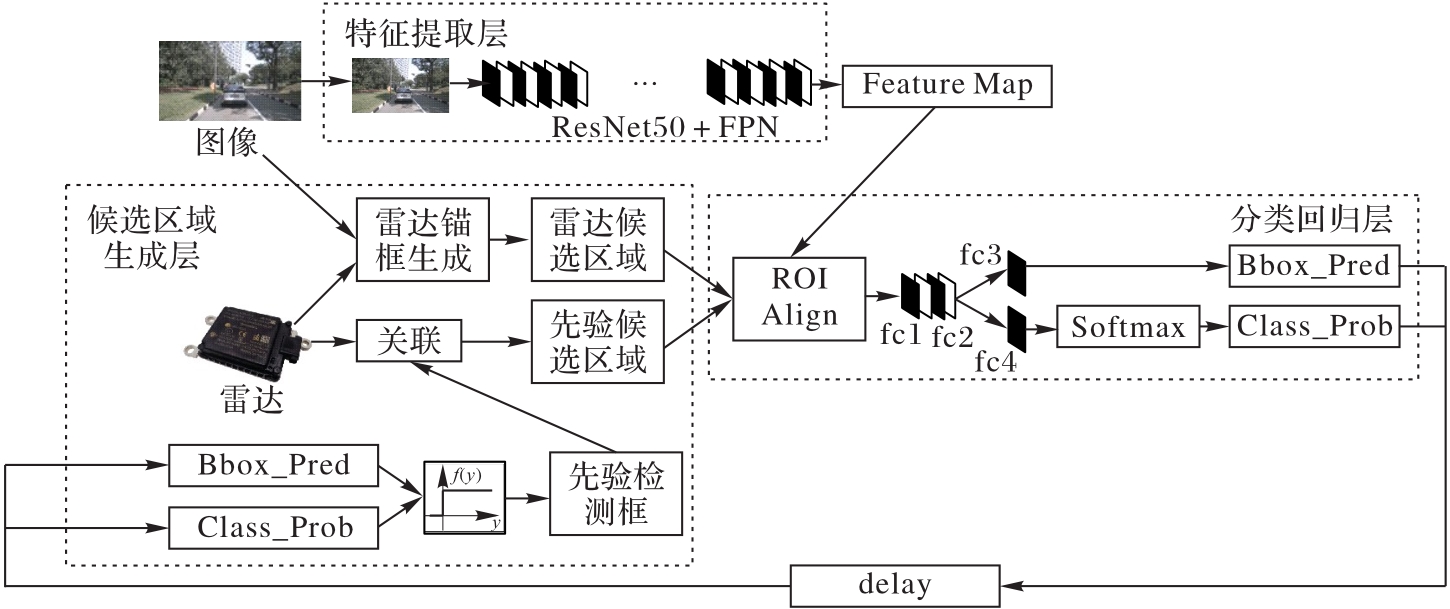
Fig. 1 Detection network structure of PRRPN
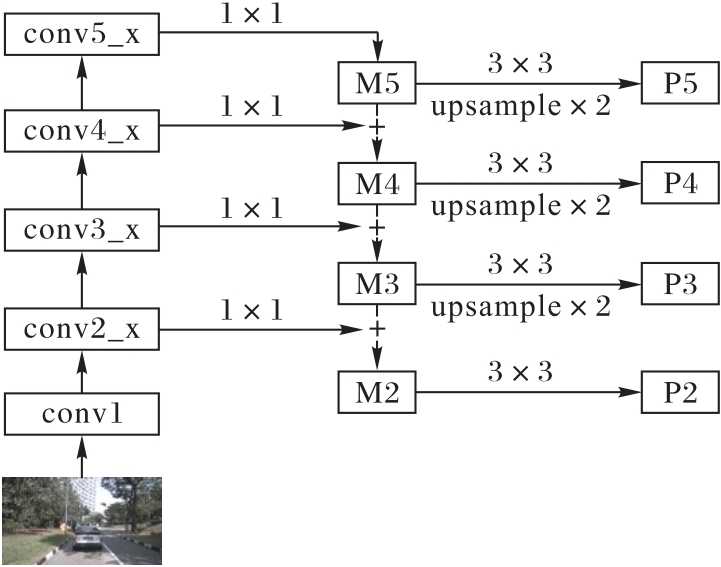
Fig. 2 Network structure of feature extraction layer
| 层级名称 | 层级结构 | Stride |
|---|---|---|
| conv1 | 7×7, 64 | 2 |
| conv2_x | 3×3 max pool, | 2 |
| 1 | ||
| conv3_x | 1 | |
| conv4_x | 1 | |
| conv5_x | 1 |
Tab. 1 Structural parameters of ResNet50
| 层级名称 | 层级结构 | Stride |
|---|---|---|
| conv1 | 7×7, 64 | 2 |
| conv2_x | 3×3 max pool, | 2 |
| 1 | ||
| conv3_x | 1 | |
| conv4_x | 1 | |
| conv5_x | 1 |
| 层级名称 | 输入尺寸 | 输出尺寸 |
|---|---|---|
| fc1 | 12 544 | 1 024 |
| fc2 | 1 024 | 1 024 |
| fc3(Bbox_Pred) | 1 024 | 24 |
| fc4(Class_Prob) | 1 024 | 7 |
Tab. 2 Parameters of fully connected layer
| 层级名称 | 输入尺寸 | 输出尺寸 |
|---|---|---|
| fc1 | 12 544 | 1 024 |
| fc2 | 1 024 | 1 024 |
| fc3(Bbox_Pred) | 1 024 | 24 |
| fc4(Class_Prob) | 1 024 | 7 |
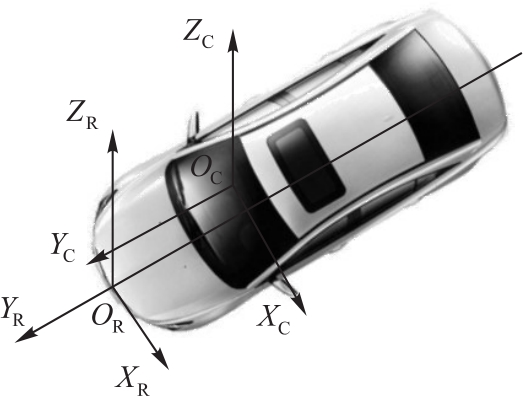
Fig. 3 Schematic diagram of radar coordinate system and camera coordinate system
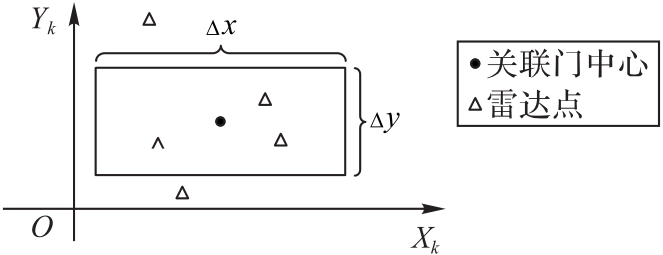
Fig. 4 Association gate
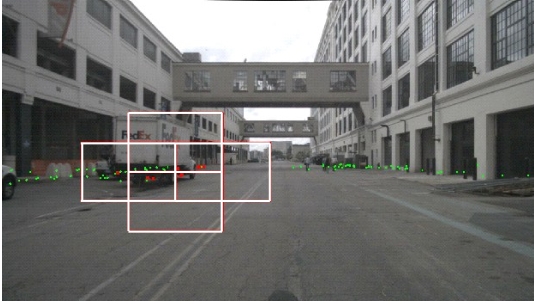
Fig. 5 Generation of prior region proposals
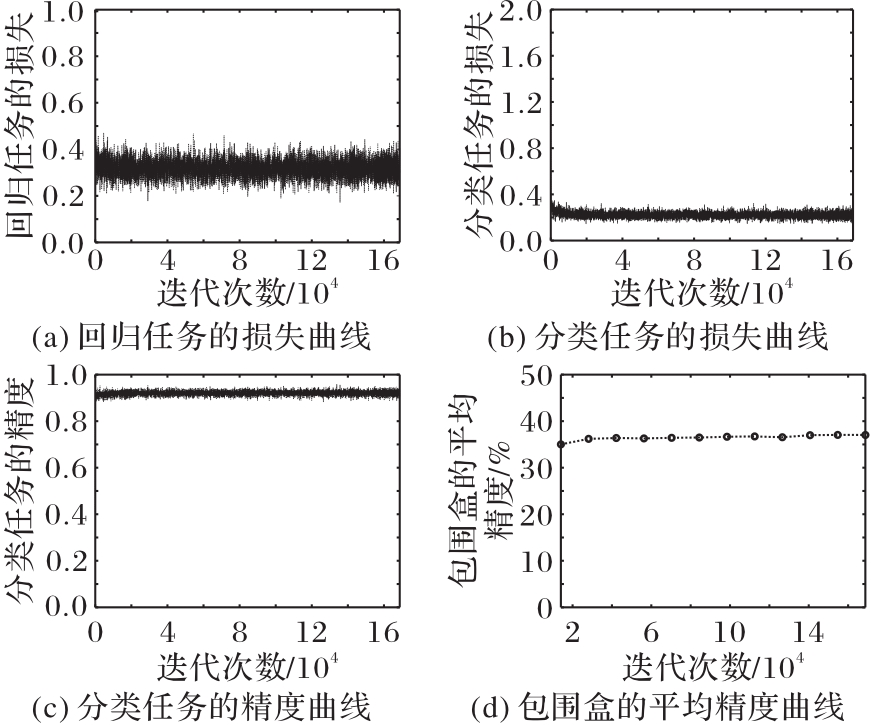
Fig. 6 Convergence curves of training process
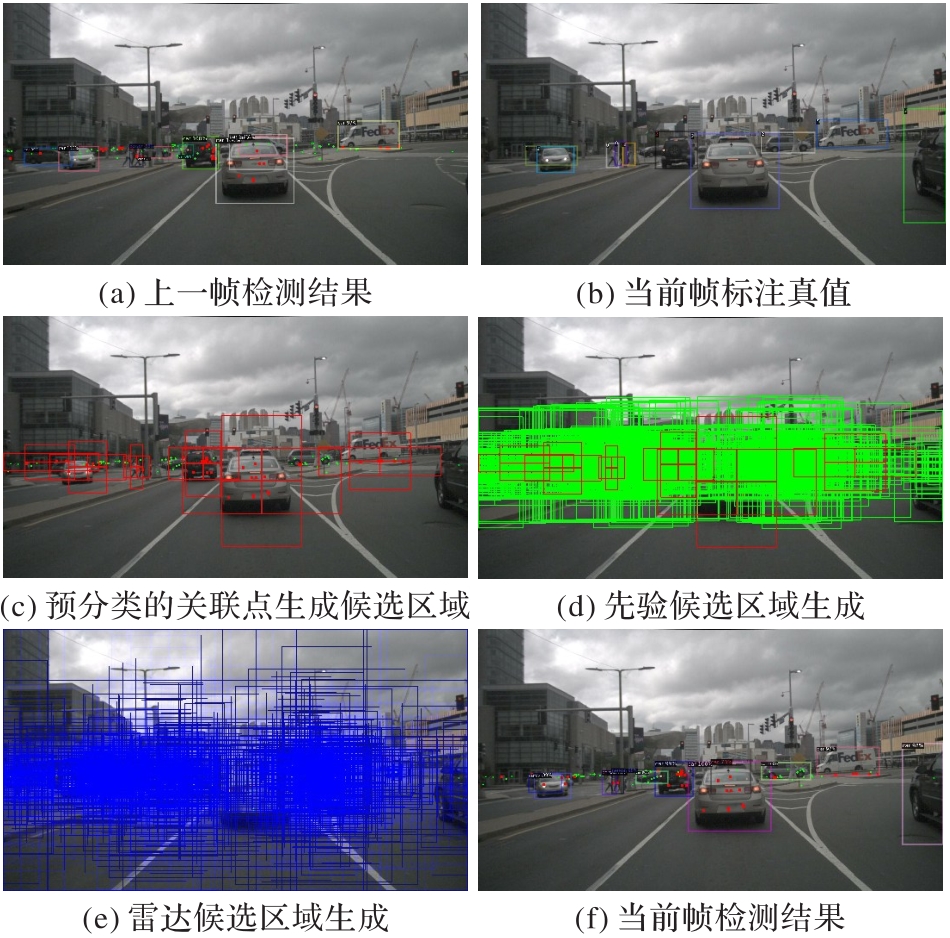
Fig. 7 Schematic diagram of PRRPN detection
| 指标 | 含义 |
|---|---|
| AP | 平均准确度,检测结果中正确结果所占比例 |
| AP50 | IoU = 0.50的检测结果的AP |
| AP75 | IoU = 0.75的检测结果的AP |
| APS | 面积 |
| APM | 322 < 面积 < 962的中等目标的AP |
| APL | 面积 |
| AR | 平均召回率,测试集中所有正样本样例中被正确检测的比例 |
| AR10 | 测试集每张图像中每10个目标中的最大召回的平均值 |
| AR100 | 测试集每张图像中每100个目标中的最大召回的平均值 |
| ARS | 面积 |
| ARM | 322 < 面积 < 962的中等目标的AR |
| ARL | 面积 |
Tab. 1 Evaluation indexes for experiment and their meanings
| 指标 | 含义 |
|---|---|
| AP | 平均准确度,检测结果中正确结果所占比例 |
| AP50 | IoU = 0.50的检测结果的AP |
| AP75 | IoU = 0.75的检测结果的AP |
| APS | 面积 |
| APM | 322 < 面积 < 962的中等目标的AP |
| APL | 面积 |
| AR | 平均召回率,测试集中所有正样本样例中被正确检测的比例 |
| AR10 | 测试集每张图像中每10个目标中的最大召回的平均值 |
| AR100 | 测试集每张图像中每100个目标中的最大召回的平均值 |
| ARS | 面积 |
| ARM | 322 < 面积 < 962的中等目标的AR |
| ARL | 面积 |
| 候选框生成方法 | AP | AP50 | AP75 | APS | APM | APL |
|---|---|---|---|---|---|---|
| PRRPN | 34.49 | 60.95 | 35.05 | 7.75 | 24.03 | 46.28 |
| RPN | 36.69 | 66.99 | 36.72 | 5.66 | 28.76 | 47.74 |
| PRRPN+RPN | 37.03 | 64.90 | 38.54 | 5.90 | 29.17 | 47.68 |
Tab. 2 APs of different detection methods
| 候选框生成方法 | AP | AP50 | AP75 | APS | APM | APL |
|---|---|---|---|---|---|---|
| PRRPN | 34.49 | 60.95 | 35.05 | 7.75 | 24.03 | 46.28 |
| RPN | 36.69 | 66.99 | 36.72 | 5.66 | 28.76 | 47.74 |
| PRRPN+RPN | 37.03 | 64.90 | 38.54 | 5.90 | 29.17 | 47.68 |
| 候选框生成方法 | AR | AR10 | AR100 | ARS | ARM | ARL |
|---|---|---|---|---|---|---|
| PRRPN | 0.268 | 0.428 | 0.433 | 0.101 | 0.335 | 0.543 |
| RPN | 0.290 | 0.476 | 0.488 | 0.242 | 0.433 | 0.569 |
| PRRPN+RPN | 0.292 | 0.478 | 0.490 | 0.249 | 0.435 | 0.568 |
Tab. 3 ARs of different detection methods
| 候选框生成方法 | AR | AR10 | AR100 | ARS | ARM | ARL |
|---|---|---|---|---|---|---|
| PRRPN | 0.268 | 0.428 | 0.433 | 0.101 | 0.335 | 0.543 |
| RPN | 0.290 | 0.476 | 0.488 | 0.242 | 0.433 | 0.569 |
| PRRPN+RPN | 0.292 | 0.478 | 0.490 | 0.249 | 0.435 | 0.568 |
候选框 生成方法 | 人 | 自行车 | 小汽车 | 摩托车 | 公共汽车 | 卡车 |
|---|---|---|---|---|---|---|
| PRRPN | 13.51 | 24.38 | 45.85 | 24.19 | 60.94 | 38.08 |
| RPN | 19.33 | 25.65 | 50.05 | 18.07 | 66.16 | 40.89 |
| PRRPN + RPN | 18.88 | 26.10 | 50.19 | 19.36 | 66.59 | 41.08 |
Tab. 4 APs of different detection methods for different classes
候选框 生成方法 | 人 | 自行车 | 小汽车 | 摩托车 | 公共汽车 | 卡车 |
|---|---|---|---|---|---|---|
| PRRPN | 13.51 | 24.38 | 45.85 | 24.19 | 60.94 | 38.08 |
| RPN | 19.33 | 25.65 | 50.05 | 18.07 | 66.16 | 40.89 |
| PRRPN + RPN | 18.88 | 26.10 | 50.19 | 19.36 | 66.59 | 41.08 |
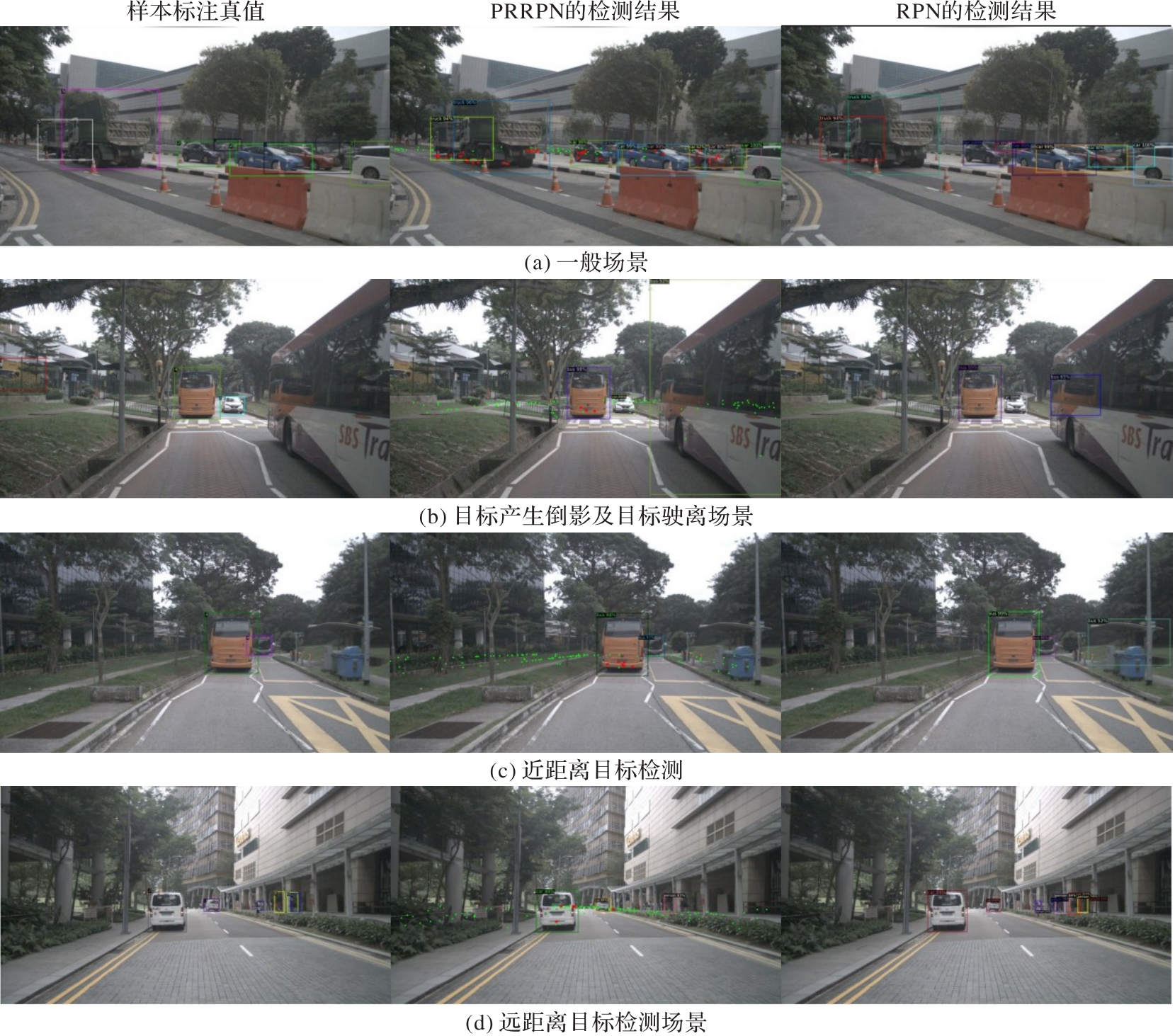
Fig. 8 Comparison of PRRPN and RPN detection results

Fig. 9 Detection result comparison of PRRPN+RPN and RPN
| 1 | SOVIANY P, IONESCU R T. Optimizing the trade-off between single-stage and two-stage deep object detectors using image difficulty prediction [C]// Proceedings of the 2018 20th International Symposium on Symbolic and Numeric Algorithms for Scientific Computing. Piscataway: IEEE, 2018: 209-214. 10.1109/synasc.2018.00041 |
| 2 | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection [C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 779-788. 10.1109/cvpr.2016.91 |
| 3 | WEI L, ANGUELOV D, ERHAN D, et al. SSD: single shot multibox detector [C]// Proceedings of the 2016 European Conference on Computer Vision, LNCS9905. Cham: Springer, 2016: 21-37. |
| 4 | REDMON J, FARHADI A. YOLO9000: better, faster, stronger [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 6517-6525. 10.1109/cvpr.2017.690 |
| 5 | REDMON J, FARHADI A. YOLOv3: an incremental improvement [EB/OL]. (2018-04-08) [2020-12-04].. 10.1109/cvpr.2018.00430 |
| 6 | GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation [C]// Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2014: 580-587. 10.1109/cvpr.2014.81 |
| 7 | GIRSHICK R. Fast R-CNN [C]// Proceedings of the 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2015: 1440-1448. 10.1109/iccv.2015.169 |
| 8 | REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks [C]// Proceedings of the 2015 28th International Conference on Neural Information Processing Systems. Cambridge: MIT Press, 2015:91-99. |
| 9 | HE K M, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN [C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017: 2980-2988. 10.1109/iccv.2017.322 |
| 10 | CAESAR H, BANKITI V, LANG A H, et al. nuScenes: a multimodal dataset for autonomous driving [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 11618-11628. 10.1109/cvpr42600.2020.01164 |
| 11 | ZHANG R Y, CAO S Y. Extending reliability of mmwave radar tracking and detection via fusion with camera [J]. IEEE Access, 2019, 7: 137065-137079. 10.1109/access.2019.2942382 |
| 12 | KIM T L, LEE J S, PARK T H, et al. Fusing lidar, radar, and camera using extended Kalman filter for estimating the forward position of vehicles [C]// Proceedings of the 2019 IEEE International Conference on Cybernetics and Intelligent Systems/ IEEE Conference on Robotics, Automation and Mechatronics. Piscataway: IEEE, 2019: 374-379. 10.1109/cis-ram47153.2019.9095859 |
| 13 | KIM K E, LEE C J, PAE D S, et al. Sensor fusion for vehicle tracking with camera and radar sensor [C]// Proceedings of the 2017 17th International Conference on Control, Automation and Systems. Piscataway: IEEE, 2017: 1075-1077. 10.23919/iccas.2017.8204375 |
| 14 | JANG Y S, PARK S K, LIM M T. Sensor fusion and compensation algorithm for vehicle tracking with front camera and corner radar sensors [C]// Proceedings of the 2019 19th International Conference on Control, Automation and Systems. Piscataway: IEEE, 2019: 575-578. 10.23919/iccas47443.2019.8971685 |
| 15 | JIANG Q Y, ZHANG L J, MENG D J. Target detection algorithm based on MMW radar and camera fusion [C]// Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference. Piscataway: IEEE, 2019: 1-6. 10.1109/itsc.2019.8917504 |
| 16 | REN J X, WANG Y, HAN Y B, et al. Information fusion of digital camera and radar [C]// Proceedings of the 2019 IEEE MTT-S International Microwave Biomedical Conference. Piscataway: IEEE, 2019: 1-4. 10.1109/imbioc.2019.8777799 |
| 17 | JHA H, LODHI V, CHAKRAVARTY D. Object detection and identification using vision and radar data fusion system for ground-based navigation [C]// Proceedings of the 2019 6th International Conference on Signal Processing and Integrated Networks. Piscataway: IEEE, 2019: 590-593. 10.1109/spin.2019.8711717 |
| 18 | LEKIC V, BABIC Z. Automotive radar and camera fusion using generative adversarial networks [J]. Computer Vision and Image Understanding, 2019, 184: 1-8. 10.1016/j.cviu.2019.04.002 |
| 19 | NOBIS F, GEISSLINGER M, WEBER M, et al. A deep learning-based radar and camera sensor fusion architecture for object detection [C]// Proceedings of the 2019 Sensor Data Fusion: Trends, Solutions, Applications. Piscataway: IEEE, 2019: 39-45. 10.1109/sdf.2019.8916629 |
| 20 | CHADWICK S, MADDERN W, NEWMAN P. Distant vehicle detection using radar and vision [C]// Proceedings of the 2019 International Conference on Robotics and Automation. Piscataway: IEEE, 2019: 8311-8317. 10.1109/icra.2019.8794312 |
| 21 | MEYER M, KUSCHK G. Deep learning based 3D object detection for automotive radar and camera [C]// Proceedings of the 2019 16th European Radar Conference. Piscataway: IEEE, 2019:133-136. |
| 22 | JI Z P, PROKHOROV D. Radar-vision fusion for object classification [C]// Proceedings of the 2008 11th International Conference on Information Fusion. Piscataway: IEEE, 2008: 1-7. |
| 23 | KOCIĆ J, JOVIČIĆ N, DRNDAREVIĆ V. Sensors and sensor fusion in autonomous vehicles [C]// Proceedings of the 2018 26th Telecommunications Forum. Piscataway: IEEE, 2018: 420-425. 10.1109/telfor.2018.8612054 |
| 24 | HAN S Y, WANG X, XU L H, et al. Frontal object perception for intelligent vehicles based on radar and camera fusion [C]// Proceedings of the 2016 35th Chinese Control Conference. Piscataway: IEEE, 2016: 4003-4008. 10.1109/chicc.2016.7553978 |
| 25 | ZHANG X Y, ZHOU M, QIU P, et al. Radar and vision fusion for the real-time obstacle detection and identification [J]. Industrial Robot, 2019, 46(3): 391-395. 10.1108/ir-06-2018-0113 |
| 26 | CHAVEZ-GARCIA R O, AYCARD O. Multiple sensor fusion and classification for moving object detection and tracking [J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2): 525-534. 10.1109/tits.2015.2479925 |
| 27 | BAIG Q, AYCARD O, VU T D, et al. Fusion between laser and stereo vision data for moving objects tracking in intersection like scenario [C]// Proceedings of the 2011 IEEE Intelligent Vehicles Symposium. Piscataway: IEEE, 2011: 362-367. 10.1109/ivs.2011.5940576 |
| 28 | BAR-SHALOM Y, TSE E. Tracking in a cluttered environment with probabilistic data association [J]. Automatica, 1975, 11(5): 451-460. 10.1016/0005-1098(75)90021-7 |
| 29 | BAR-SHALOM Y, DAUM F, HUANG J. The probabilistic data association filter [J]. IEEE Control Systems Magazine, 2009, 29(6): 82-100. 10.1109/mcs.2009.934469 |
| 30 | NABATI R, QI H R. RRPN: radar region proposal network for object detection in autonomous vehicles [C]// Proceedings of the 2019 IEEE International Conference on Image Processing. Piscataway: IEEE, 2019: 3093-3097. 10.1109/icip.2019.8803392 |
| 31 | WU Y X, KIRILLOV A, MASSA F, et al. Detectron2 [EB/OL]. [2019-11-09]. . |
| 32 | LIN T Y, MAIRE M, BELONGIE S, et al. Microsoft COCO: common objects in context [C]// Proceedings of the 2014 European Conference on Computer Vision, LNCS8693. Cham: Springer, 2014: 740-755. |
| 33 | 罗俊海,王章静.多源数据融合和传感器管理[M].北京:清华大学出版社,2015:6-11. 10.1002/ecs2.2015.6.issue-11 |
| LUO J H, WANG Z J. Multi-source Data Fusion and Sensor Management [M]. Beijing: Tsinghua University Press, 2015: 6-11. 10.1002/ecs2.2015.6.issue-11 | |
| 34 | 何友,修建娟,关欣.雷达数据处理及应用[M].3版.北京:电子工业出版社,2013:87-90. |
| HE Y, XIU J J, GUAN X. Radar Data Processing with Applications [M]. 3rd ed. Beijing: Publishing House of Electronics Industry, 2013: 87-90. |
| [1] | Jing QIN, Zhiguang QIN, Fali LI, Yueheng PENG. Diagnosis of major depressive disorder based on probabilistic sparse self-attention neural network [J]. Journal of Computer Applications, 2024, 44(9): 2970-2974. |
| [2] | Hang YANG, Wanggen LI, Gensheng ZHANG, Zhige WANG, Xin KAI. Multi-layer information interactive fusion algorithm based on graph neural network for session-based recommendation [J]. Journal of Computer Applications, 2024, 44(9): 2719-2725. |
| [3] | Xingyao YANG, Yu CHEN, Jiong YU, Zulian ZHANG, Jiaying CHEN, Dongxiao WANG. Recommendation model combining self-features and contrastive learning [J]. Journal of Computer Applications, 2024, 44(9): 2704-2710. |
| [4] | Na WANG, Lin JIANG, Yuancheng LI, Yun ZHU. Optimization of tensor virtual machine operator fusion based on graph rewriting and fusion exploration [J]. Journal of Computer Applications, 2024, 44(9): 2802-2809. |
| [5] | Yexin PAN, Zhe YANG. Optimization model for small object detection based on multi-level feature bidirectional fusion [J]. Journal of Computer Applications, 2024, 44(9): 2871-2877. |
| [6] | Yun LI, Fuyou WANG, Peiguang JING, Su WANG, Ao XIAO. Uncertainty-based frame associated short video event detection method [J]. Journal of Computer Applications, 2024, 44(9): 2903-2910. |
| [7] | Tingjie TANG, Jiajin HUANG, Jin QIN. Session-based recommendation with graph auxiliary learning [J]. Journal of Computer Applications, 2024, 44(9): 2711-2718. |
| [8] | Rui ZHANG, Pengyun ZHANG, Meirong GAO. Self-optimized dual-modal multi-channel non-deep vestibular schwannoma recognition model [J]. Journal of Computer Applications, 2024, 44(9): 2975-2982. |
| [9] | Jinjin LI, Guoming SANG, Yijia ZHANG. Multi-domain fake news detection model enhanced by APK-CNN and Transformer [J]. Journal of Computer Applications, 2024, 44(9): 2674-2682. |
| [10] | Yu DU, Yan ZHU. Constructing pre-trained dynamic graph neural network to predict disappearance of academic cooperation behavior [J]. Journal of Computer Applications, 2024, 44(9): 2726-2731. |
| [11] | Guanglei YAO, Juxia XIONG, Guowu YANG. Flower pollination algorithm based on neural network optimization [J]. Journal of Computer Applications, 2024, 44(9): 2829-2837. |
| [12] | Ying HUANG, Jiayu YANG, Jiahao JIN, Bangrui WAN. Siamese mixed information fusion algorithm for RGBT tracking [J]. Journal of Computer Applications, 2024, 44(9): 2878-2885. |
| [13] | Yeheng LI, Guangsheng LUO, Qianmin SU. Logo detection algorithm based on improved YOLOv5 [J]. Journal of Computer Applications, 2024, 44(8): 2580-2587. |
| [14] | Hong CHEN, Bing QI, Haibo JIN, Cong WU, Li’ang ZHANG. Class-imbalanced traffic abnormal detection based on 1D-CNN and BiGRU [J]. Journal of Computer Applications, 2024, 44(8): 2493-2499. |
| [15] | Ying YANG, Xiaoyan HAO, Dan YU, Yao MA, Yongle CHEN. Graph data generation approach for graph neural network model extraction attacks [J]. Journal of Computer Applications, 2024, 44(8): 2483-2492. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||