


Journal of Computer Applications ›› 2024, Vol. 44 ›› Issue (9): 2938-2946.DOI: 10.11772/j.issn.1001-9081.2023091342
• Frontier and comprehensive applications • Previous Articles Next Articles
Lingxia MU1, Zhengjun ZHOU1, Ban WANG2( ), Youmin ZHANG3, Xianghong XUE1, Kaikai NING1
), Youmin ZHANG3, Xianghong XUE1, Kaikai NING1
Received:2023-10-07
Revised:2023-12-07
Accepted:2023-12-12
Online:2024-03-15
Published:2024-09-10
Contact:
Ban WANG
About author:MU Lingxia, born in 1988, Ph. D., associate professor. Her research interests include autonomous trajectory planning, guidance and control.Supported by:
穆凌霞1, 周政君1, 王斑2(), 张友民3, 薛向宏1, 宁凯凯1
通讯作者:
王斑
作者简介:穆凌霞(1988—),女,江苏盐城人,副教授,博士,主要研究方向:自主轨迹规划、制导与控制基金资助:CLC Number:
Lingxia MU, Zhengjun ZHOU, Ban WANG, Youmin ZHANG, Xianghong XUE, Kaikai NING. Formation obstacle-avoidance and reconfiguration method for multiple UAVs[J]. Journal of Computer Applications, 2024, 44(9): 2938-2946.
穆凌霞, 周政君, 王斑, 张友民, 薛向宏, 宁凯凯. 多无人机编队避障和编队重构方法[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2938-2946.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2023091342
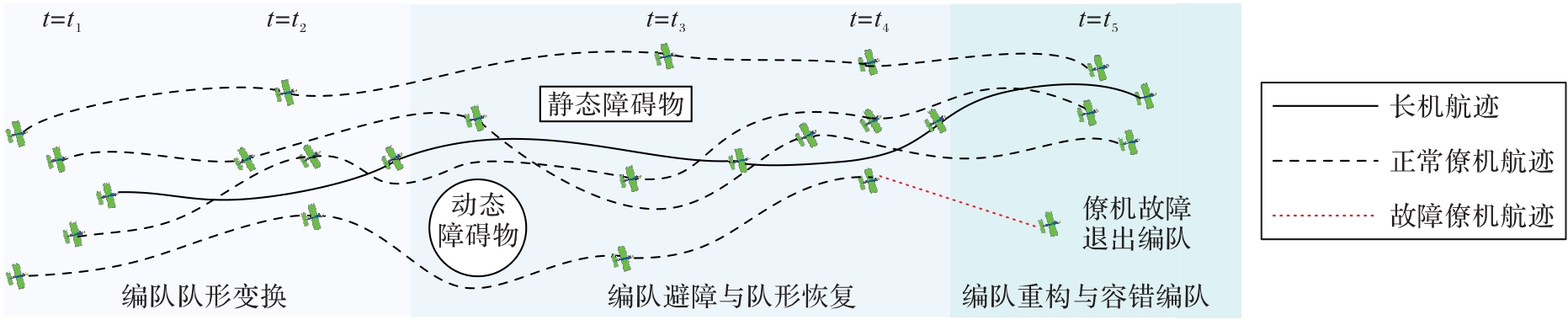
Fig. 1 Description of multi-UAV formation planning problem

Fig. 2 Flow of proposed method

Fig. 3 Leader-follower formation
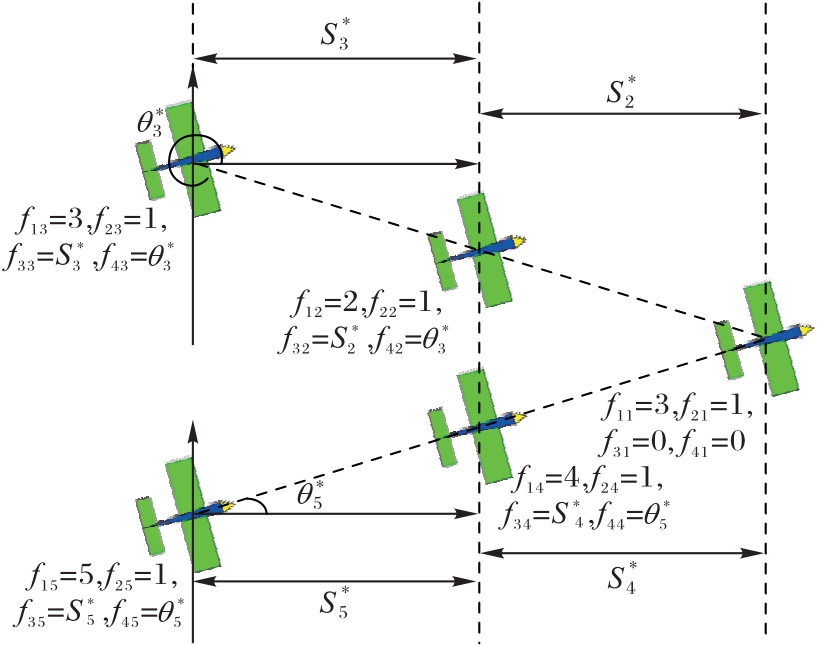
Fig. 4 Formation shape information
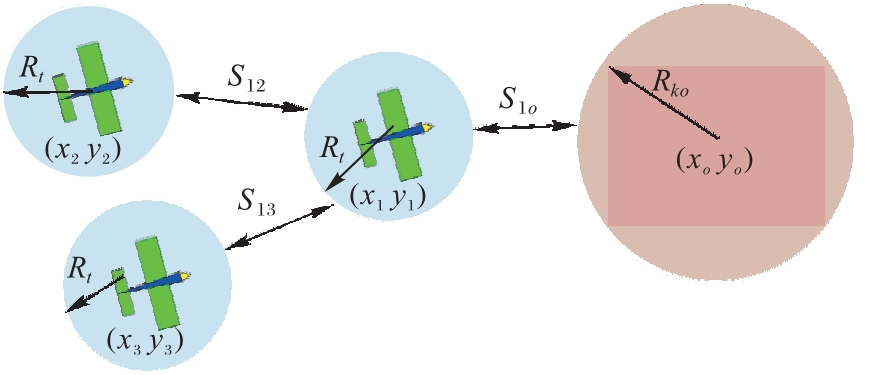
Fig. 5 Example of formation obstacle avoidance
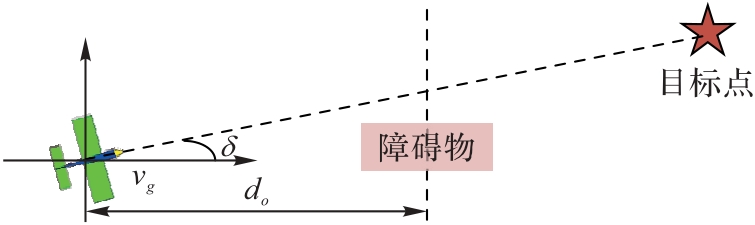
Fig. 6 Example of UAV evaluation function
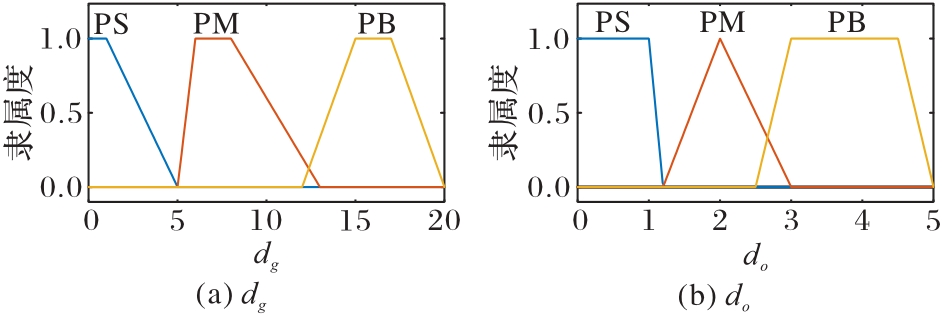
Fig. 7 Input variable membership functions of fuzzy rules
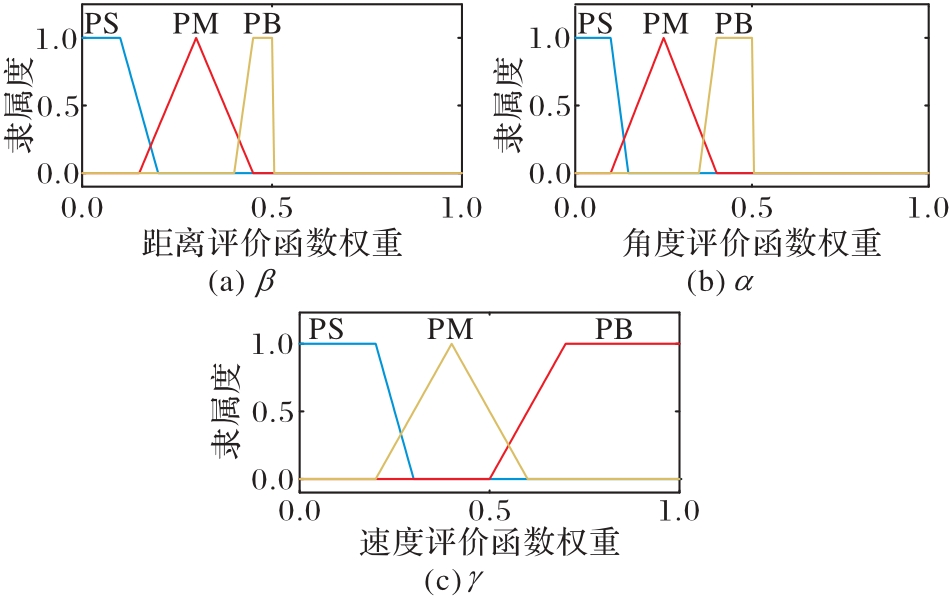
Fig. 8 Output variable membership functions of fuzzy rules
| 序号 | 输入 | 输出 | |||
|---|---|---|---|---|---|
| dg | do | α | β | γ | |
| 1 | PS | PB | PB | PM | PS |
| 2 | PS | PM | PB | PM | PS |
| 3 | PS | PB | PB | PS | PS |
| 4 | PM | PB | PS | PB | PS |
| 5 | PM | PM | PM | PM | PS |
| 6 | PM | PB | PM | PS | PB |
| 7 | PS | PB | PS | PB | PS |
| 8 | PS | PM | PM | PM | PM |
| 9 | PB | PB | PB | PS | PB |
Tab. 1 Fuzzy rules combined with DWA
| 序号 | 输入 | 输出 | |||
|---|---|---|---|---|---|
| dg | do | α | β | γ | |
| 1 | PS | PB | PB | PM | PS |
| 2 | PS | PM | PB | PM | PS |
| 3 | PS | PB | PB | PS | PS |
| 4 | PM | PB | PS | PB | PS |
| 5 | PM | PM | PM | PM | PS |
| 6 | PM | PB | PM | PS | PB |
| 7 | PS | PB | PS | PB | PS |
| 8 | PS | PM | PM | PM | PM |
| 9 | PB | PB | PB | PS | PB |
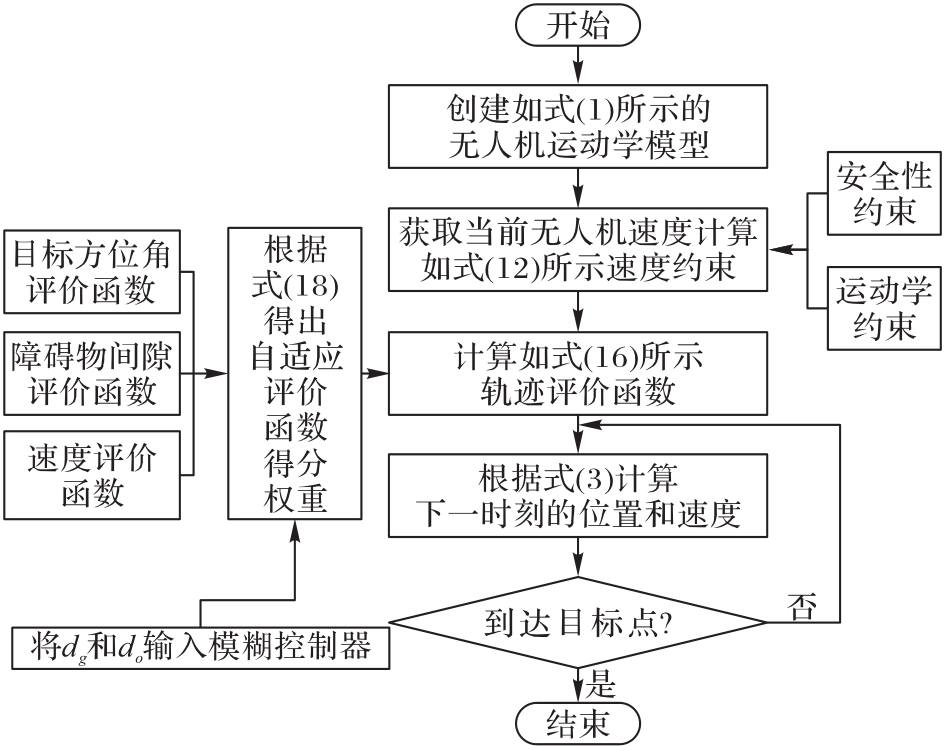
Fig. 9 DWA based on adaptive evaluation function parameters
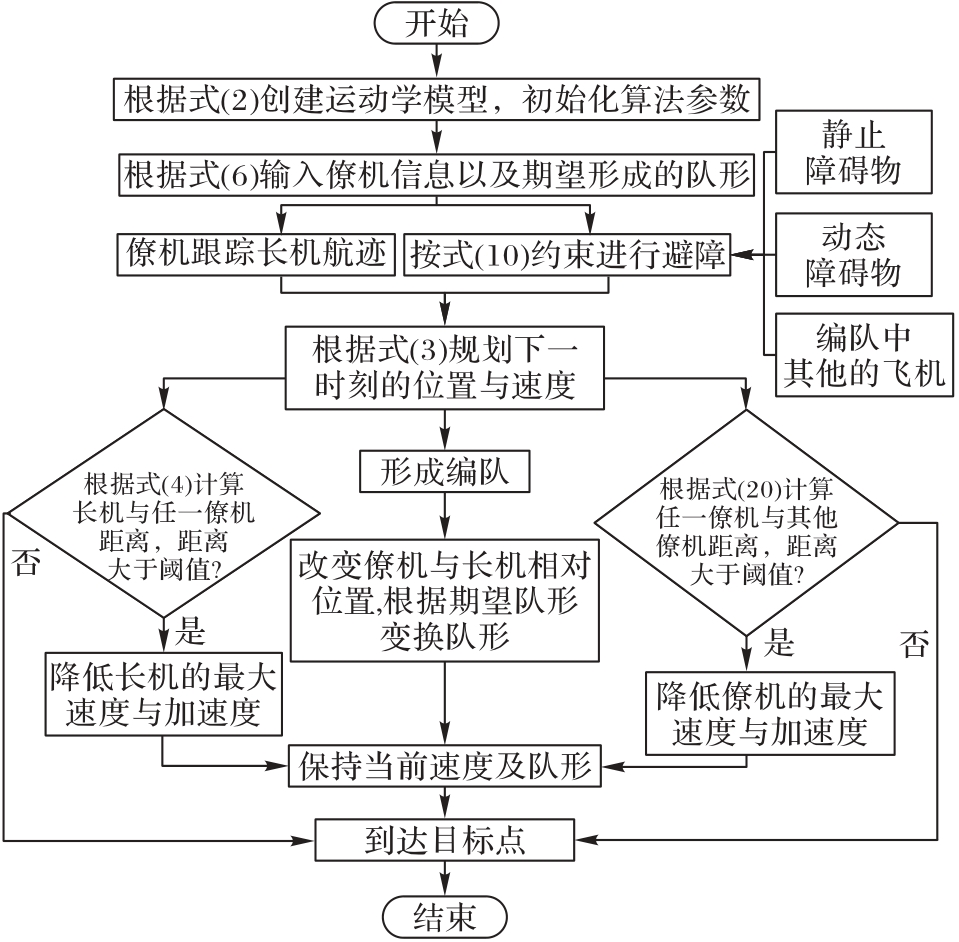
Fig. 10 Obstacle avoidance and switching algorithm for multi-UAV formation
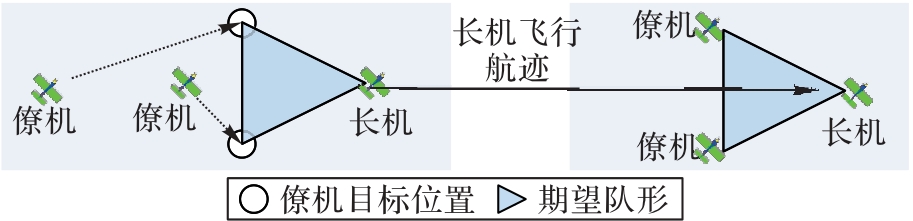
Fig. 11 Process of formation switching
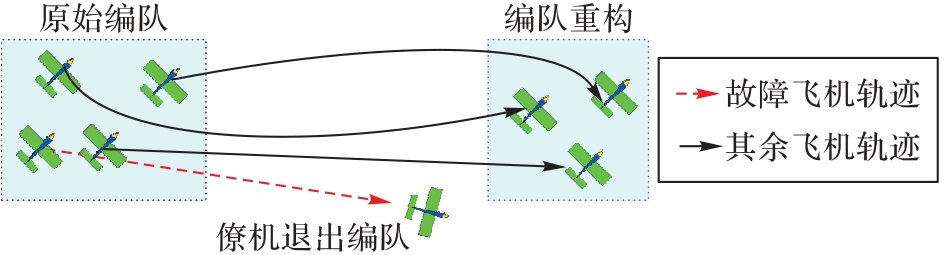
Fig. 12 Formation reconfiguration process after UAV fault occurrence
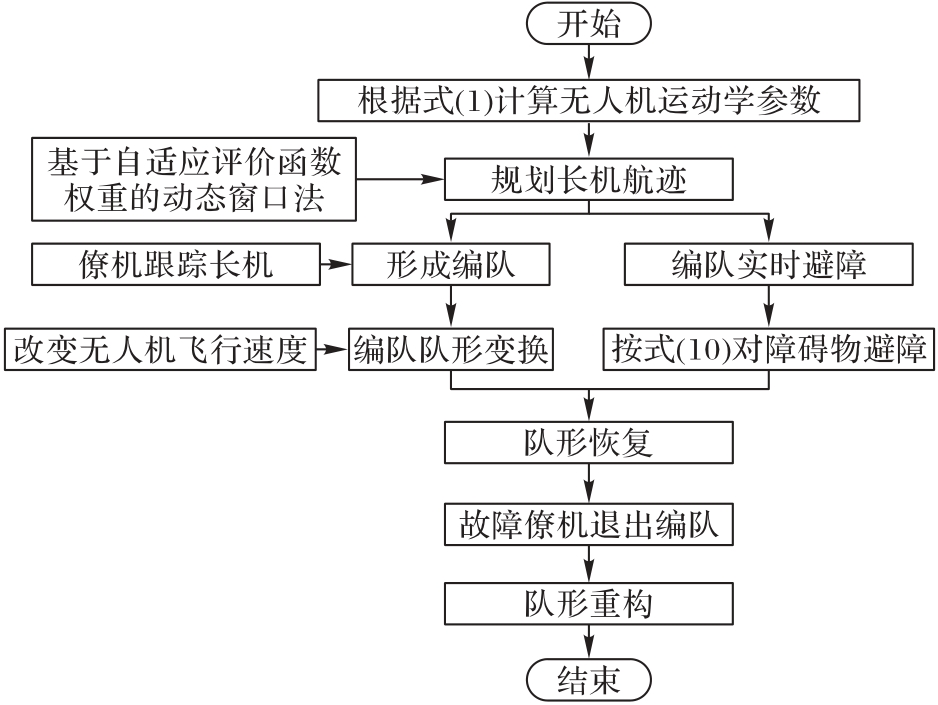
Fig. 13 Obstacle avoidance and formation reconfiguration algorithm of multi-UAV formation
| 参数 | 值 | 参数 | 值 |
|---|---|---|---|
| 20 m/s | 0.05 | ||
| 0.4 m/s2 | 0.2 | ||
| 20 deg/s | 0.1 | ||
| 0.4 deg/s2 |
Tab. 2 Initial parameter setting
| 参数 | 值 | 参数 | 值 |
|---|---|---|---|
| 20 m/s | 0.05 | ||
| 0.4 m/s2 | 0.2 | ||
| 20 deg/s | 0.1 | ||
| 0.4 deg/s2 |
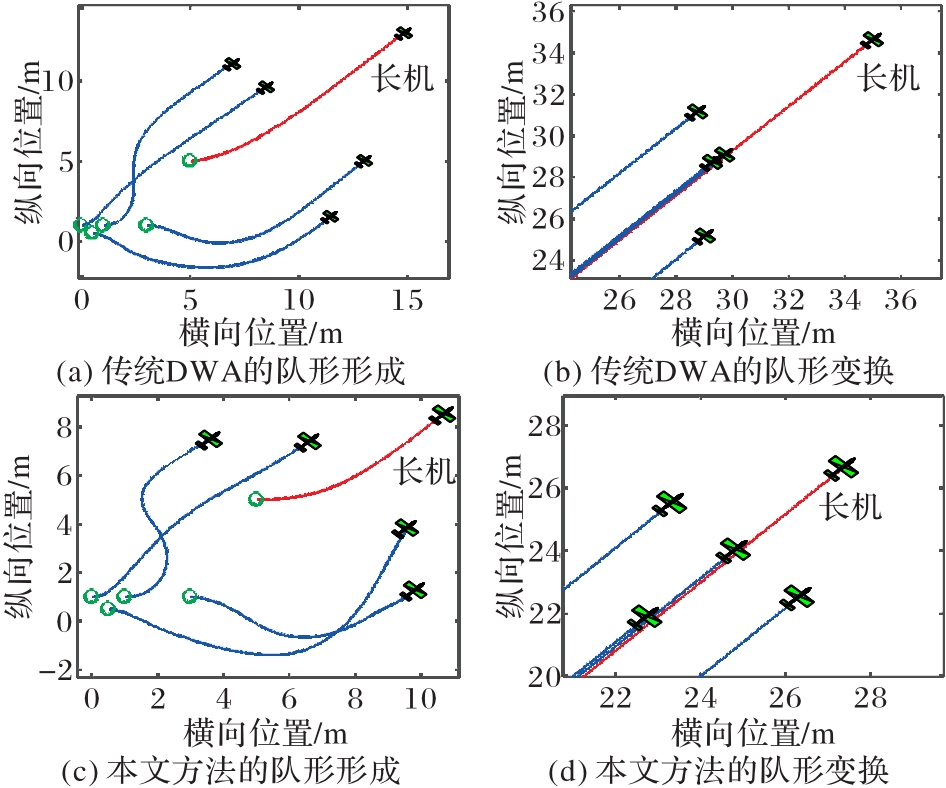
Fig. 14 Simulation results of multi-UAV formation and switching
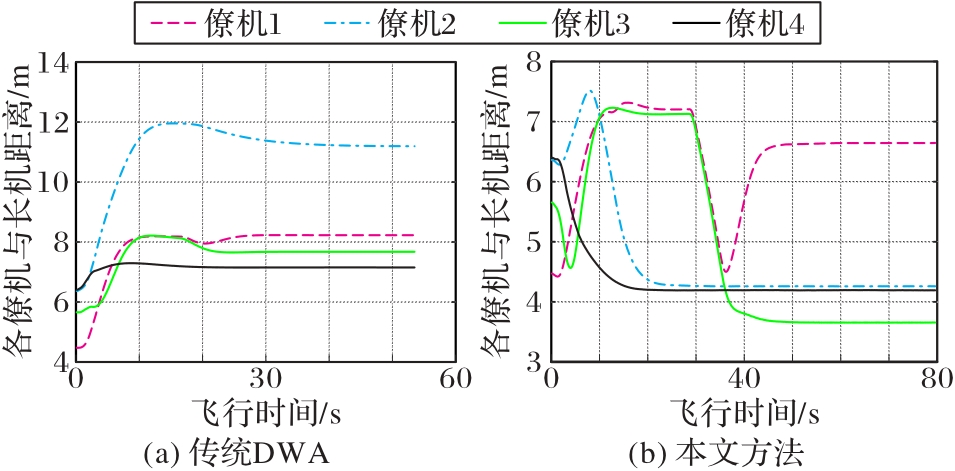
Fig. 15 Distance between each follower and leader of different methods
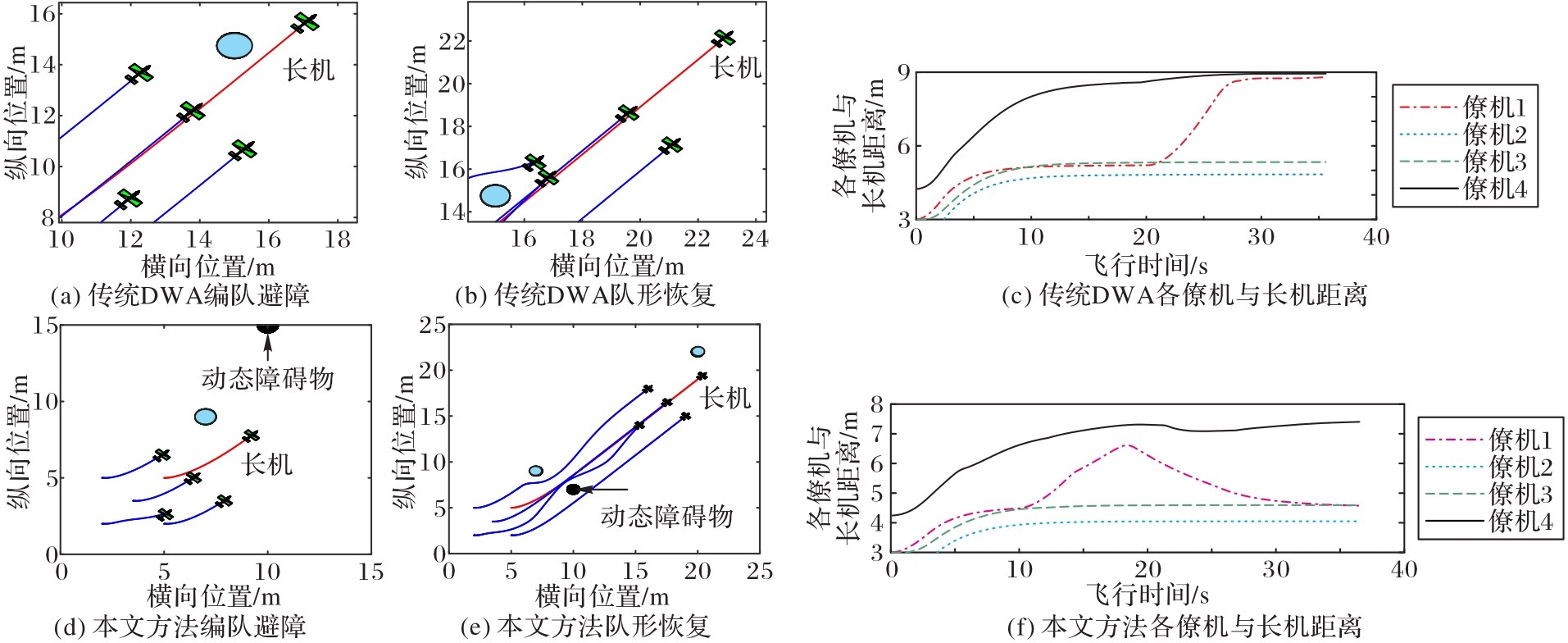
Fig. 16 Simulation results of different methods for formation obstacle avoidance and recovery
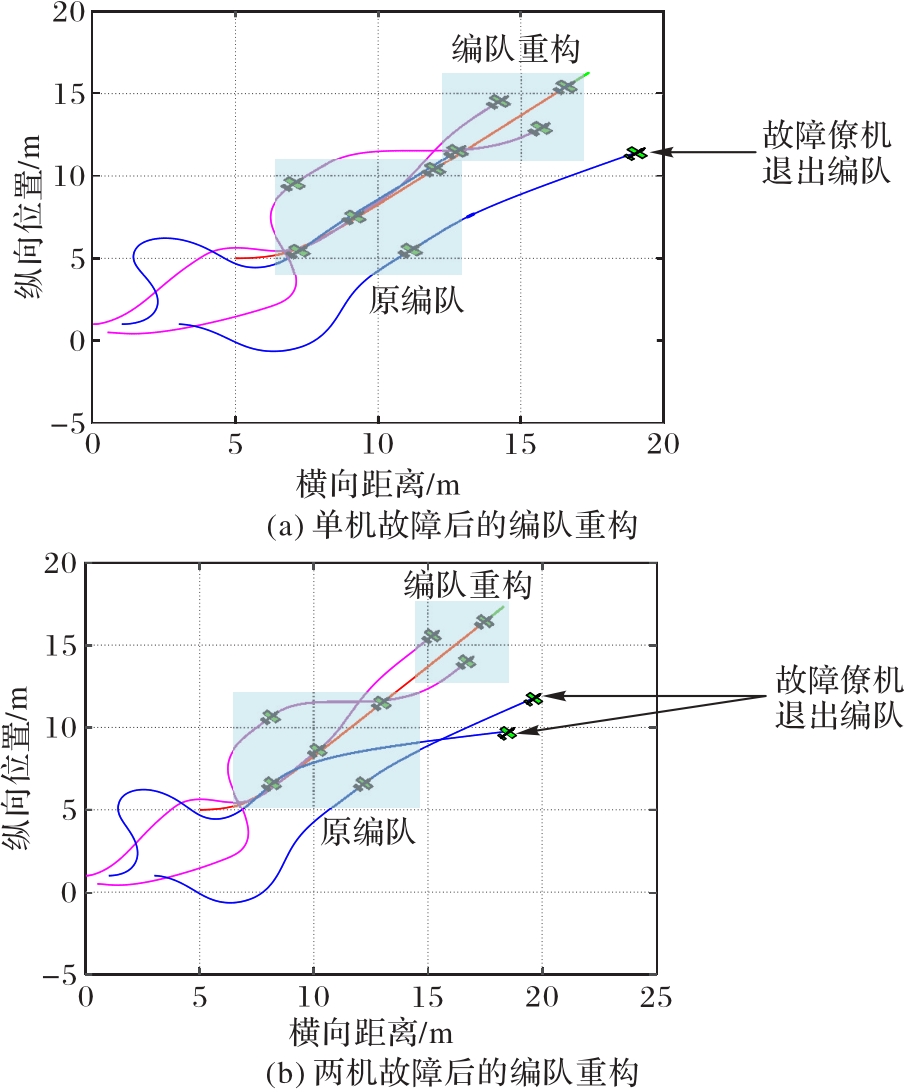
Fig. 17 Formation reconfiguration in case of single UAV fault and two UAVs fault
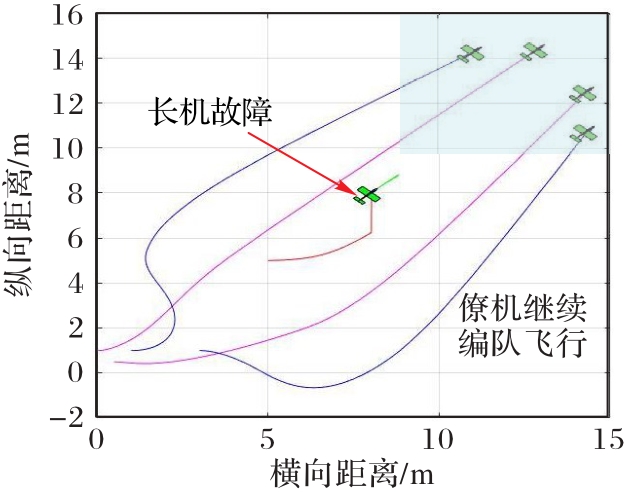
Fig. 18 Formation reconfiguration in case of fault occurrence in leader-UAV
| 1 | 宗群,王丹丹,邵士凯, 等. 多无人机协同编队飞行控制研究现状及发展 [J]. 哈尔滨工业大学学报, 2017, 49(3):1-14. |
| ZONG Q, WANG D D, SHAO S K, et al. Research status and development of multi-UAV coordinated formation flight control [J]. Journal of Harbin Institute of Technology, 2017, 49(3): 1-14. | |
| 2 | WANG H-M, ZHANG X, JIANG J-C. UAV-involved wireless physical-layer secure communications: overview and research directions [J]. IEEE Wireless Communications, 2019, 26(5): 32-39. |
| 3 | 张安,杨咪,毕文豪,等.基于多策略GWO算法的不确定环境下异构多无人机任务分配[J].航空学报,2023,44(8): 327115. |
| ZHANG A, YANG M, BI W H, et al. Task allocation of heterogeneous multi-UAVs in uncertain environment based on multiple strategies GWO [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(8): 327115. | |
| 4 | YAO W, QI N, WAN N, et al. An iterative strategy for task assignment and path planning of distributed multiple unmanned aerial vehicles [J]. Aerospace Science and Technology, 2019, 86: 455-464. |
| 5 | 吴立尧, 苏析超, 王垒, 等. 有人/无人机编队队形集结控制研究[J]. 系统工程与电子技术, 2023,45(7):2192-2202. |
| WU L Y, SU X C, WANG L, et al. Research of formation rendezvous control for manned/unmanned aerial vehicles formation [J]. Systems Engineering and Electronics, 2023, 45(7): 2192-2202. | |
| 6 | 许洋, 秦小林, 刘佳, 等. 多无人机自适应编队协同航迹规划[J]. 计算机应用, 2020, 40(5): 1515-1521. |
| XU Y, QIN X L, LIU J, et al. Multi-unmanned aerial vehicle adaptive formation cooperative trajectory planning [J]. Journal of Computer Applications, 2020, 40(5): 1515-1521. | |
| 7 | LIU D, BAO W, ZHU X, et al. Cooperative path optimization for multiple UAVs surveillance in uncertain environment [J]. IEEE Internet of Things, 2022, 9(13): 10676-10692. |
| 8 | 苟进展,吴宇,邓嘉宁.基于群智能一致性理论的无人机编队全过程飞行航迹规划方法研究[J]. 控制与决策, 2023,38(5):1464-1472. |
| GOU J Z, WU Y, DENG J N. Swarm intelligence and consensus theory-based trajectory planning for a complete flight of UAV formation [J]. Control and Decision, 2023, 38(5):1464-1472. | |
| 9 | 周映江,蒋国平,周帆,等. 基于滑模方法的分布式多无人机编队控制[J].信息与控制,2018,47(3):306-313. |
| ZHOU Y J, JIANG G P, ZHOU F, et al. Distributed Multi-UAV formation control based on sliding mode method [J]. Information and Control, 2018, 47(3): 306-313. | |
| 10 | 徐星光, 王晓峰, 姚璐, 等. 固定翼无人机编队构型与通信拓扑优化[J]. 系统工程与电子技术, 2022, 44(9): 2936-2946. |
| XU X G, WANG X F, YAO L, et al. Formation configuration and communication topology optimization for fixed-wing UAVs [J]. Systems Engineering and Electronics, 2022, 44(9): 2936-2946. | |
| 11 | 赵军民,何浩哲,王少奇,等.复杂环境下多无人机目标跟踪与避障联合航迹规划 [J].兵工学报,2023,44(9):2685-2696. |
| ZHAO J M, HE H Z, WANG S Q, et al. Joint path planning for multiple UAVs target tracking and obstacle avoidance in complicated environment [J]. Acta Armamentarii, 2023, 44(9): 2685-2696. | |
| 12 | DUAN H, LUO Q, SHI Y, et al. Hybrid particle swarm optimization and genetic algorithm for multi-UAV formation reconfiguration [J]. IEEE Computational Intelligence Magazine, 2013, 8(3): 16-27. |
| 13 | ZHANG J, YAN J, ZHANG P. Multi-UAV formation control based on a novel back-stepping approach [J]. IEEE Transactions on Vehicular Technology, 2020, 69(3): 2437-2448. |
| 14 | 费思远, 鲜斌, 王岭. 基于群集行为的分布式多无人机编队动态避障控制[J]. 控制理论与应用, 2022, 39(1) :1-11. |
| FEI S Y, XIAN B, WANG L. Distributed formation control for multiple unmanned aerial vehicles with dynamic obstacle avoidance based on the flocking behavior [J]. Control Theory & Applications, 2022, 39(1): 1-11. | |
| 15 | CHAMSEDDINE A, ZHANG Y, RABBATH C A. Trajectory planning and re-planning for fault tolerant formation flight control of quadrotor unmanned aerial vehicles [C]// Proceedings of the 2012 American Control Conference. Piscataway: IEEE, 2012: 3291-3296. |
| 16 | WANG Y, SHAN M, WANG D. Motion capability analysis for multiple fixed-wing UAV formations with speed and heading rate constraints [J]. IEEE Transactions on Control of Network Systems, 2019, 7(2): 977-989. |
| 17 | XU Y, ZHENG W, LUO D, et al. Dynamic affine formation control of networked under-actuated quad-rotor UAVs with three-dimensional patterns [J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1269-1285. |
| 18 | PAN Z, ZHANG C, XIA Y, et al. An improved artificial potential field method for path planning and formation control of the multi-UAV systems [J]. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2021, 69(3): 1129-1133. |
| 19 | BIAN L, SUN W, SUN T. Trajectory following and improved differential evolution solution for rapid forming of UAV formation[J]. IEEE Access, 2019, 7: 169599-169613. |
| 20 | 卢燕梅, 宗群, 张秀云, 等. 集群无人机队形重构及虚拟仿真验证[J]. 航空学报, 2020, 41(4): 323580. |
| LU Y M, ZONG Q, ZHANG X Y, et al. Formation reconstruction and virtual simulation verification of swarm UAVs [J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(4): 323580. | |
| 21 | GUO J, QI J, WANG M, et al. Distributed cooperative obstacle avoidance and formation reconfiguration for multiple quadrotors: theory and experiment [J]. Aerospace Science and Technology, 2023, 136: 108218. |
| 22 | GONG J, JIANG B, MA Y, et al. Distributed adaptive fault-tolerant formation-containment control with prescribed performance for heterogeneous multi agent systems [J]. IEEE Transactions on Cybernetics, 2023, 53(12): 7787-7799. |
| 23 | 任立敏, 王伟东, 杜志江, 等. 障碍环境下多移动机器人动态优化队形变换 [J]. 机器人, 2013, 35(5): 535-543. |
| REN L M, WANG W D, DU Z J, et al. Dynamic and optimized formation switching for multiple mobile robots in obstacle environments [J]. Robot, 2013, 35(5): 535-543. | |
| 24 | 常路, 单梁, 戴跃伟, 等. 未知环境下基于改进DWA的多机器人编队控制[J]. 控制与决策, 2022, 37(10): 2524-2534. |
| CHANG L, SHAN L, DAI Y W, et al. Multi-robot formation control in unknown environment based on improved DWA [J]. Control and Decision, 2022, 37(10): 2524-2534. | |
| 25 | XIANG L, LI X, LIU H, et al. Parameter fuzzy self-adaptive dynamic window approach for local path planning of wheeled robot [J]. IEEE Open Journal of Intelligent Transportation Systems, 2022, 3: 1-6. |
| 26 | J-H MOON, LEE B-Y, M-J TAHK. A hybrid dynamic window approach for collision avoidance of VTOL UAVs [J]. International Journal of Aeronautical and Space Sciences, 2018, 19: 889-903. |
| [1] | Zhiqiang ZHENG, Haibin DUAN. Short-range UAV air combat maneuver decision-making via finite tolerance pigeon-inspired optimization [J]. Journal of Computer Applications, 2024, 44(5): 1401-1407. |
| [2] | Tianyu HUANG, Yuanxing LI, Hao CHEN, Zijia GUO, Mingjun WEI. User cluster partitioning method based on weighted fuzzy clustering in ground-air collaboration scenarios [J]. Journal of Computer Applications, 2024, 44(5): 1555-1561. |
| [3] | Rui TANG, Shibo YUE, Ruizhi ZHANG, Chuan LIU, Chuanlin PANG. Energy efficiency optimization mechanism for UAV-assisted and non-orthogonal multiple access-enabled data collection system [J]. Journal of Computer Applications, 2024, 44(4): 1209-1218. |
| [4] | Meiyu CAI, Runzhe ZHU, Fei WU, Kaiyu ZHANG, Jiale LI. Cross-view matching model based on attention mechanism and multi-granularity feature fusion [J]. Journal of Computer Applications, 2024, 44(3): 901-908. |
| [5] | Huzhen GAO, Changping DU, Yao ZHENG. Gimbal system control algorithm of unmanned aerial vehicle based on extended state observer [J]. Journal of Computer Applications, 2024, 44(2): 604-610. |
| [6] | Lin WANG, Jingliang LIU, Wuwei WANG. Small target detection method in UAV images based on fusion of dilated convolution and Transformer [J]. Journal of Computer Applications, 2024, 44(11): 3595-3602. |
| [7] | Jian SUN, Baoquan MA, Zhuiwei WU, Xiaohuan YANG, Tao WU, Pan CHEN. Joint optimization of UAV swarm path planning and task allocation balance in earthquake scenarios [J]. Journal of Computer Applications, 2024, 44(10): 3232-3239. |
| [8] | Yu WANG, Tianjun REN, Zilin FAN. Air combat maneuver decision-making of unmanned aerial vehicle based on guided Minimax-DDQN [J]. Journal of Computer Applications, 2023, 43(8): 2636-2643. |
| [9] | Zhongyuan ZHANG, Wei DAI, Guangyu LI, Xiaoqing CHEN, Qibo DENG. Cooperative obstacle avoidance algorithm based on improved artificial potential field and consensus protocol [J]. Journal of Computer Applications, 2023, 43(8): 2644-2650. |
| [10] | Xiaolin LI, Yusang JIANG. Task offloading algorithm for UAV-assisted mobile edge computing [J]. Journal of Computer Applications, 2023, 43(6): 1893-1899. |
| [11] | Chaoshuai QI, Wensi HE, Yi JIAO, Yinghong MA, Wei CAI, Suping REN. Survey on anomaly detection algorithms for unmanned aerial vehicle flight data [J]. Journal of Computer Applications, 2023, 43(6): 1833-1841. |
| [12] | Xianlan WANG, Jinkun ZHOU, Nan MU, Chen WANG. Cross-view geo-localization method based on multi-task joint learning [J]. Journal of Computer Applications, 2023, 43(5): 1625-1635. |
| [13] | Yanan SUN, Jiehong WU, Junling SHI, Lijun GAO. Multi-UAV collaborative task assignment method based on improved self-organizing map [J]. Journal of Computer Applications, 2023, 43(5): 1551-1556. |
| [14] | Longbao WANG, Yinqi LUAN, Liang XU, Xin ZENG, Shuai ZHANG, Shufang XU. Route planning method of UAV swarm based on dynamic cluster particle swarm optimization [J]. Journal of Computer Applications, 2023, 43(12): 3816-3823. |
| [15] | Lin ZHAO, Ke LYU, Jing GUO, Chen HONG, Xiancai XIANG, Jian XUE, Yong WANG. UAV cluster cooperative combat decision-making method based on deep reinforcement learning [J]. Journal of Computer Applications, 2023, 43(11): 3641-3646. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||