


Journal of Computer Applications ›› 2024, Vol. 44 ›› Issue (10): 3185-3190.DOI: 10.11772/j.issn.1001-9081.2023101465
• Multimedia computing and computer simulation • Previous Articles Next Articles
Xukang KAN1, Gefei SHI1,2( ), Xuerong YANG1
), Xuerong YANG1
Received:2023-10-27
Revised:2024-01-26
Accepted:2024-02-04
Online:2024-10-15
Published:2024-10-10
Contact:
Gefei SHI
About author:KAN Xukang, born in 1998, M. S. candidate. His research interests include visual SLAM, semantic SLAM.Supported by:
阚绪康1, 史格非1,2(), 杨雪榕1
通讯作者:
史格非
作者简介:阚绪康(1998—),男,安徽滁州人,硕士研究生,主要研究方向:视觉SLAM、语义SLAMCLC Number:
Xukang KAN, Gefei SHI, Xuerong YANG. ORB-SLAM2 algorithm based on dynamic feature point filtering and optimization of keyframe selection[J]. Journal of Computer Applications, 2024, 44(10): 3185-3190.
阚绪康, 史格非, 杨雪榕. 基于动态特征点滤除与关键帧选择优化的ORB-SLAM2算法[J]. 《计算机应用》唯一官方网站, 2024, 44(10): 3185-3190.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2023101465
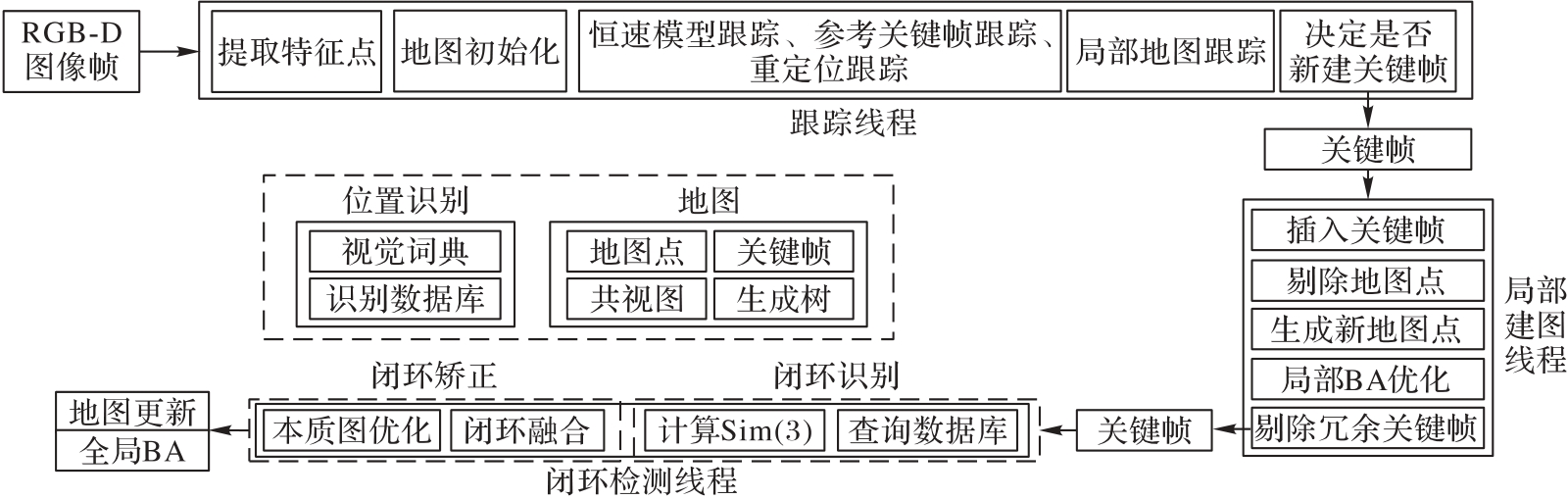
Fig. 1 ORB-SLAM2 algorithm framework

Fig. 2 Flow of dynamic feature point elimination algorithm
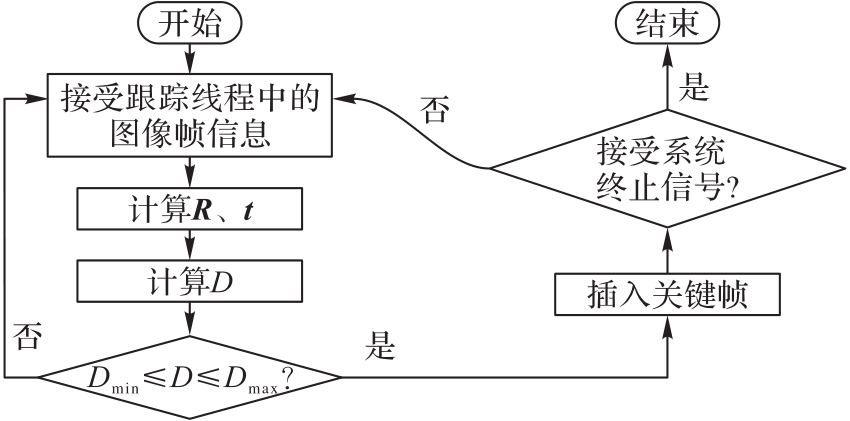
Fig. 3 Flow of keyframe selection algorithm
| 算法 | 第1次 | 第2次 | 第3次 | 平均值 |
|---|---|---|---|---|
| ORB-SLAM2 | 55.782 | 54.220 | 59.257 | 56.420 |
引入PSPNet算法的 ORB-SLAM2算法 | 81.321 | 79.301 | 79.405 | 80.009 |
| 本文算法 | 34.454 | 34.487 | 35.080 | 34.674 |
Tab. 1 Time consumption of different algorithms on freiburg3_walking_xyz dataset
| 算法 | 第1次 | 第2次 | 第3次 | 平均值 |
|---|---|---|---|---|
| ORB-SLAM2 | 55.782 | 54.220 | 59.257 | 56.420 |
引入PSPNet算法的 ORB-SLAM2算法 | 81.321 | 79.301 | 79.405 | 80.009 |
| 本文算法 | 34.454 | 34.487 | 35.080 | 34.674 |
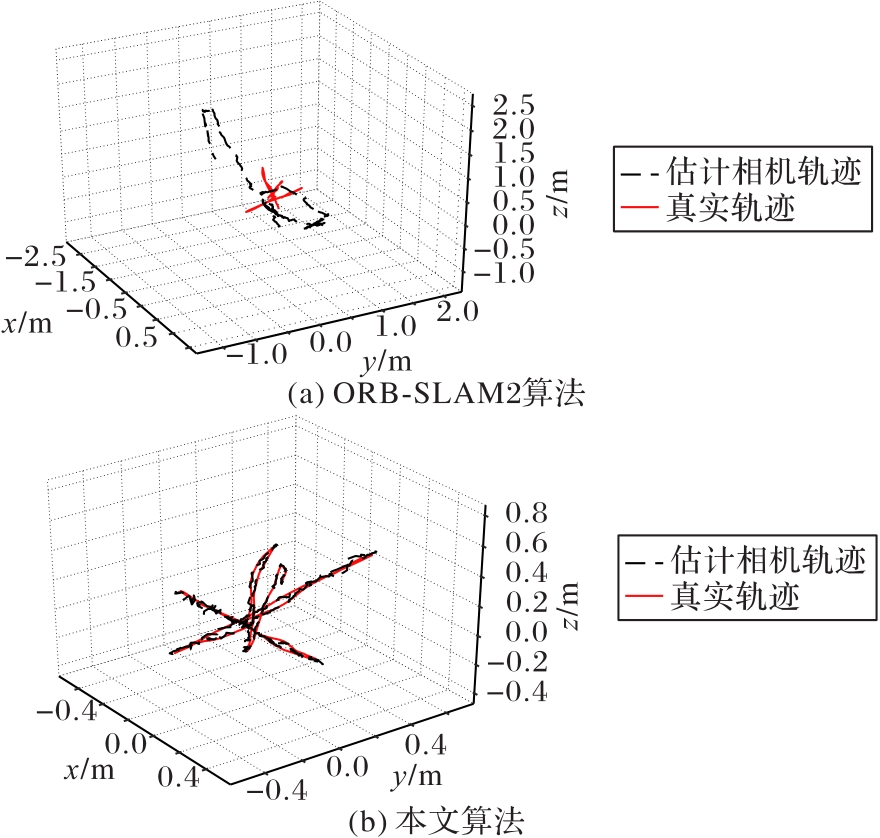
Fig. 4 Comparison of estimated trajectory and real trajectory when running freiburg3_walking_xyz

Fig. 5 Absolute trajectory pose diagrams of ORB-SLAM2 algorithm and proposed algorithm when running freiburg3_walking_xyz dataset

Fig. 6 Absolute trajectory pose diagrams of ORB-SLAM2 algorithm and proposed algorithm when running freiburg3_walking_halfsphere dataset

Fig. 7 Absolute trajectory pose diagrams of ORB-SLAM2 algorithm and proposed algorithm when running freiburg3_walking_static dataset
| 数据集序列 | ORB-SLAM2算法 | 本文算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| 均方根误差 | 平均值 | 中位数 | 标准差 | 均方根误差 | 平均值 | 中位数 | 标准差 | |
| freiburg3_walking_xyz | 0.293 7 | 0.255 6 | 0.240 1 | 0.144 6 | 0.014 1 | 0.012 1 | 0.010 9 | 0.007 1 |
| freiburg3_walking_halfsphere | 0.315 3 | 0.285 5 | 0.279 6 | 0.133 7 | 0.021 9 | 0.017 2 | 0.014 0 | 0.013 4 |
| freiburg3_walking_static | 0.025 0 | 0.021 3 | 0.018 8 | 0.013 2 | 0.008 6 | 0.007 6 | 0.006 9 | 0.004 0 |
Tab. 2 Absolute trajectory error comparison
| 数据集序列 | ORB-SLAM2算法 | 本文算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| 均方根误差 | 平均值 | 中位数 | 标准差 | 均方根误差 | 平均值 | 中位数 | 标准差 | |
| freiburg3_walking_xyz | 0.293 7 | 0.255 6 | 0.240 1 | 0.144 6 | 0.014 1 | 0.012 1 | 0.010 9 | 0.007 1 |
| freiburg3_walking_halfsphere | 0.315 3 | 0.285 5 | 0.279 6 | 0.133 7 | 0.021 9 | 0.017 2 | 0.014 0 | 0.013 4 |
| freiburg3_walking_static | 0.025 0 | 0.021 3 | 0.018 8 | 0.013 2 | 0.008 6 | 0.007 6 | 0.006 9 | 0.004 0 |
| 数据集序列 | ORB-SLAM2算法 | 本文算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| 均方根误差 | 平均值 | 中位数 | 标准差 | 均方根误差 | 平均值 | 中位数 | 标准差 | |
| freiburg3_walking_xyz | 0.030 1 | 0.024 2 | 0.020 0 | 0.017 9 | 0.012 5 | 0.010 0 | 0.008 2 | 0.007 4 |
| freiburg3_walking_halfsphere | 0.025 3 | 0.019 0 | 0.014 0 | 0.016 6 | 0.017 8 | 0.013 0 | 0.010 1 | 0.012 1 |
| freiburg3_walking_static | 0.014 1 | 0.009 5 | 0.005 8 | 0.010 4 | 0.007 8 | 0.006 3 | 0.005 3 | 0.004 5 |
Tab. 3 Relative trajectory error comparison
| 数据集序列 | ORB-SLAM2算法 | 本文算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| 均方根误差 | 平均值 | 中位数 | 标准差 | 均方根误差 | 平均值 | 中位数 | 标准差 | |
| freiburg3_walking_xyz | 0.030 1 | 0.024 2 | 0.020 0 | 0.017 9 | 0.012 5 | 0.010 0 | 0.008 2 | 0.007 4 |
| freiburg3_walking_halfsphere | 0.025 3 | 0.019 0 | 0.014 0 | 0.016 6 | 0.017 8 | 0.013 0 | 0.010 1 | 0.012 1 |
| freiburg3_walking_static | 0.014 1 | 0.009 5 | 0.005 8 | 0.010 4 | 0.007 8 | 0.006 3 | 0.005 3 | 0.004 5 |
| 算法 | 均方根误差 | 平均值 | 中位数 | 标准差 |
|---|---|---|---|---|
| ORB-SLAM2 | 0.315 3 | 0.285 5 | 0.279 6 | 0.133 7 |
引入PSPNet算法的 ORB-SLAM2算法 | 0.037 4 | 0.029 3 | 0.025 1 | 0.018 2 |
| 本文算法 | 0.021 9 | 0.017 2 | 0.014 0 | 0.013 4 |
Tab. 4 Comparison of absolute trajectory errors of different algorithms when running freiburg3_walking_halfsphere dataset
| 算法 | 均方根误差 | 平均值 | 中位数 | 标准差 |
|---|---|---|---|---|
| ORB-SLAM2 | 0.315 3 | 0.285 5 | 0.279 6 | 0.133 7 |
引入PSPNet算法的 ORB-SLAM2算法 | 0.037 4 | 0.029 3 | 0.025 1 | 0.018 2 |
| 本文算法 | 0.021 9 | 0.017 2 | 0.014 0 | 0.013 4 |
| 数据集序列 | ORB-SLAM2算法 | 本文算法 |
|---|---|---|
| freiburg3_walking_xyz | 90 | 97 |
| freiburg3_walking_halfsphere | 151 | 172 |
| freiburg3_walking_static | 51 | 54 |
Tab. 5 Number of keyframes between ORB-SLAM2 algorithm and proposed algorithm on different datasets
| 数据集序列 | ORB-SLAM2算法 | 本文算法 |
|---|---|---|
| freiburg3_walking_xyz | 90 | 97 |
| freiburg3_walking_halfsphere | 151 | 172 |
| freiburg3_walking_static | 51 | 54 |
Fig. 8 Running results of keyframe selection algorithm on freiburg3_walking_halfsphere dataset
| 1 | CHENG J, ZHANG L, CHEN Q, et al. A review of visual SLAM methods for autonomous driving vehicles[J]. Engineering Applications of Artificial Intelligence, 2022, 114: No.104992. |
| 2 | ZHENG S, WANG J, RIZOS C, et al. Simultaneous Localization And Mapping (SLAM) for autonomous driving: concept and analysis[J]. Remote Sensing, 2023, 15(4): No.1156. |
| 3 | SHARAFUTDINOV D, GRIGULETSKII M, KOPANEV P, et al. Comparison of modern open-source visual SLAM approaches[J]. Journal of Intelligent and Robotic Systems, 2023, 107: No.43. |
| 4 | 郑太雄,江明哲,冯明驰. 基于视觉的采摘机器人目标识别与定位方法研究综述[J]. 仪器仪表学报, 2021, 42(9): 28-51. |
| ZHENG T X, JIANG M Z, FENG M C. Vision based target recognition and location for picking robot: a review[J]. Chinese Journal of Scientific Instrument, 2021, 42(9): 28-51. | |
| 5 | ZHANG H, YE F, LAI Y, et al. IQ-VIO: adaptive visual inertial odometry via interference quantization under dynamic environments[J]. Intelligent Service Robotics, 2023, 16(5): 565-581. |
| 6 | ZHAO X, ZUO T, HU X. OFM-SLAM: a visual semantic SLAM for dynamic indoor environments[J]. Mathematical Problems in Engineering, 2021, 2021: No.5538840. |
| 7 | GONZALEZ M, MARCHAND E, KACETE A, et al. TwistSLAM: constrained SLAM in dynamic environment[J]. IEEE Robotics and Automation Letters, 2022, 7(3): 6846-6853. |
| 8 | ZHANG L, WISTH D, CAMURRI M, et al. Balancing the budget: feature selection and tracking for multi-camera visual-inertial odometry[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 1182-1189. |
| 9 | ZHANG X, WANG X, ZHANG R. Dynamic semantics SLAM based on improved Mask R-CNN[J]. IEEE Access, 2022, 10: 126525-126535. |
| 10 | FAN Y, ZHANG Q, TANG Y, et al. Blitz-SLAM: a semantic SLAM in dynamic environments[J]. Pattern Recognition, 2022, 121: No.108225. |
| 11 | YOU Y, WEI P, CAI J, et al. MISD-SLAM: multimodal semantic SLAM for dynamic environments[J]. Wireless Communications and Mobile Computing, 2022, 2022: No.7600669. |
| 12 | CAMPOS C, ELVIRA R, RODRÍGUEZ J J G, et al. ORB-SLAM3: an accurate open-source library for visual, visual-inertial, and multimap SLAM[J]. IEEE Transactions on Robotics, 2021, 37(6): 1874-1890. |
| 13 | LIU J, LI X, LIU Y, et al. RGB-D inertial odometry for a resource-restricted robot in dynamic environments[J]. IEEE Robotics and Automation Letters, 2022, 7(4): 9573-9580. |
| 14 | WEI S, LI Z. An RGB-D SLAM algorithm based on adaptive semantic segmentation in dynamic environment[J]. Journal of Real-Time Image Processing, 2023, 20: No.85. |
| 15 | YIN H, LI S, TAO Y, et al. Dynam-SLAM: an accurate, robust stereo visual-inertial SLAM method in dynamic environments[J]. IEEE Transactions on Robotics, 2023, 39(1): 289-308. |
| 16 | YUAN C, XU Y, ZHOU Q. PLDS-SLAM: point and line features SLAM in dynamic environment[J]. Remote Sensing, 2023, 15(7): No.1893. |
| 17 | 伍晓东,张松柏,汤适荣,等. 基于改进关键帧选择的 ORB-SLAM3算法[J]. 计算机应用研究, 2023, 40(5): 1428-1433. |
| WU X D, ZHANG S B, TANG S R, et al. Improved key-frame selection algorithm based on ORB-SLAM3[J]. Application Research of Computers, 2023, 40(5): 1428-1433. | |
| 18 | 陈孟元,丁陵梅,张玉坤. 基于改进关键帧选取策略的快速PL-SLAM算法[J]. 电子学报, 2022, 50(3): 608-618. |
| CHEN M Y, DING L M, ZHANG Y K. Fast PL-SLAM algorithm based on improved keyframe extraction strategy[J]. Acta Electronica Sinica, 2022, 50(3):608-618. | |
| 19 | MUR-ARTAL R, TARDÓS J D. ORB-SLAM2: an open-source SLAM system for monocular, stereo, and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262. |
| 20 | STURM J, ENGELHARD N, ENDRES F, et al. A benchmark for the evaluation of RGB-D SLAM systems[C]// Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2012: 573-580. |
| 21 | 游通飞,孔令华,刘文玉,等. 视觉SLAM在动态场景下的图像处理方法[J]. 红外技术, 2021, 43(10): 960-967. |
| YOU T F, KONG L H, LIU W Y, et al. Image processing method for visual simultaneous localization and mapping in dynamic scene[J]. Infrared Technology, 2021, 43(10): 960-967. |
| [1] | Jia WANG-ZHU, Zhou YU, Jun YU, Jianping FAN. Video dynamic scene graph generation model based on multi-scale spatial-temporal Transformer [J]. Journal of Computer Applications, 2024, 44(1): 47-57. |
| [2] | Zongzhe LYU, Hui XU, Xiao YANG, Yong WANG, Weijian WANG. Small object detection algorithm of YOLOv5 for safety helmet [J]. Journal of Computer Applications, 2023, 43(6): 1943-1949. |
| [3] | Jiadong LI, Danpu ZHANG, Yaqiong FAN, Jianfeng YANG. Lightweight ship target detection algorithm based on improved YOLOv5 [J]. Journal of Computer Applications, 2023, 43(3): 923-929. |
| [4] | Wenju LI, Gan ZHANG, Liu CUI, Wanghui CHU. Lightweight traffic sign recognition model based on coordinate attention [J]. Journal of Computer Applications, 2023, 43(2): 608-614. |
| [5] | Jin ZHANG, Peiqi QU, Cheng SUN, Meng LUO. Safety helmet wearing detection algorithm based on improved YOLOv5 [J]. Journal of Computer Applications, 2022, 42(4): 1292-1300. |
| [6] | Hao FU, Hegen XU, Zhiming ZHANG, Shaohua QI. Visual simultaneous localization and mapping based on semantic and optical flow constraints in dynamic scenes [J]. Journal of Computer Applications, 2021, 41(11): 3337-3344. |
| [7] | DING Doujian, ZHAO Xiaolin, WANG Changgen, GAO Guangen, KOU Lei. Autonomous localization and obstacle detection method of robot based on vision [J]. Journal of Computer Applications, 2019, 39(6): 1849-1854. |
| [8] | XI Zhihong, HAN Shuangquan, WANG Hongxu. Simultaneous localization and semantic mapping of indoor dynamic scene based on semantic segmentation [J]. Journal of Computer Applications, 2019, 39(10): 2847-2851. |
| [9] | JIANG Xingguo, LI Zhifeng, ZHANG Long. Adaptive improvement of video compressed sensing based on linear dynamic system [J]. Journal of Computer Applications, 2015, 35(1): 198-201. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||