


Journal of Computer Applications ›› 2021, Vol. 41 ›› Issue (11): 3337-3344.DOI: 10.11772/j.issn.1001-9081.2021010003
• Multimedia computing and computer simulation • Previous Articles Next Articles
Hao FU, Hegen XU( ), Zhiming ZHANG, Shaohua QI
), Zhiming ZHANG, Shaohua QI
Received:2021-01-05
Revised:2021-03-12
Accepted:2021-03-19
Online:2021-11-29
Published:2021-11-10
Contact:
Hegen XU
About author:FU Hao,born in 1996,M. S. candidate. His research interests
include visual simultaneous localization and mapping,deep learning,
machine vision
付豪, 徐和根(), 张志明, 齐少华
通讯作者:
徐和根
作者简介:付豪(1996—),男,安徽合肥人,硕士研究生,主要研究方向:视觉同步定位与地图构建、深度学习、机器视觉CLC Number:
Hao FU, Hegen XU, Zhiming ZHANG, Shaohua QI. Visual simultaneous localization and mapping based on semantic and optical flow constraints in dynamic scenes[J]. Journal of Computer Applications, 2021, 41(11): 3337-3344.
付豪, 徐和根, 张志明, 齐少华. 动态场景下基于语义和光流约束的视觉同步定位与地图构建[J]. 《计算机应用》唯一官方网站, 2021, 41(11): 3337-3344.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2021010003

Fig. 1 Overall framework of proposed algorithm

Fig. 2 Framework of dynamic feature point filtering algorithm

Fig. 3 Segmentation results of semantic segmentation network

Fig. 4 Schematic diagram of epipolar geometry

Fig. 5 Results of direct calculation of optical flow

Fig. 6 Results of optical flow calculation after correction

Fig. 7 Using moving object masks and optical flow to filter out dynamic points forconstructing static point cloud map

Fig. 8 Point cloud segmentation results based onsemantic segmentation

Fig. 9 Object bounding box

Fig. 10 Flow chart of semantic map updating
| 序列 | 绝对轨迹误差/m | 本文算法的性能提升/% | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ORB-SLAM2 | 本文算法 | |||||||||||
| 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | |
| W-hs | 0.599 9 | 0.566 3 | 0.329 7 | 0.684 5 | 0.021 7 | 0.018 4 | 0.013 6 | 0.025 6 | 96.4 | 96.8 | 95.9 | 96.3 |
| W-rpy | 0.686 2 | 0.623 3 | 0.408 7 | 0.799 1 | 0.025 9 | 0.020 5 | 0.019 4 | 0.032 4 | 96.2 | 96.7 | 95.3 | 95.9 |
| W-static | 0.287 6 | 0.245 9 | 0.133 9 | 0.317 3 | 0.005 9 | 0.005 4 | 0.003 1 | 0.006 7 | 97.9 | 97.8 | 97.6 | 97.9 |
| W-xyz | 0.370 5 | 0.650 0 | 0.645 3 | 0.744 1 | 0.013 1 | 0.011 4 | 0.007 5 | 0.015 1 | 96.5 | 98.2 | 98.8 | 98.0 |
| S-hs | 0.014 1 | 0.011 4 | 0.011 8 | 0.018 4 | 0.013 7 | 0.011 3 | 0.010 6 | 0.017 3 | 2.6 | 0.7 | 5.7 | |
| S-rpy | 0.016 0 | 0.010 9 | 0.016 1 | 0.022 6 | 0.013 7 | 0.010 6 | 0.010 0 | 0.017 0 | 14.2 | 2.9 | 37.4 | 25.0 |
Tab. 1 Result comparison of absolute trajectory error
| 序列 | 绝对轨迹误差/m | 本文算法的性能提升/% | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ORB-SLAM2 | 本文算法 | |||||||||||
| 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | |
| W-hs | 0.599 9 | 0.566 3 | 0.329 7 | 0.684 5 | 0.021 7 | 0.018 4 | 0.013 6 | 0.025 6 | 96.4 | 96.8 | 95.9 | 96.3 |
| W-rpy | 0.686 2 | 0.623 3 | 0.408 7 | 0.799 1 | 0.025 9 | 0.020 5 | 0.019 4 | 0.032 4 | 96.2 | 96.7 | 95.3 | 95.9 |
| W-static | 0.287 6 | 0.245 9 | 0.133 9 | 0.317 3 | 0.005 9 | 0.005 4 | 0.003 1 | 0.006 7 | 97.9 | 97.8 | 97.6 | 97.9 |
| W-xyz | 0.370 5 | 0.650 0 | 0.645 3 | 0.744 1 | 0.013 1 | 0.011 4 | 0.007 5 | 0.015 1 | 96.5 | 98.2 | 98.8 | 98.0 |
| S-hs | 0.014 1 | 0.011 4 | 0.011 8 | 0.018 4 | 0.013 7 | 0.011 3 | 0.010 6 | 0.017 3 | 2.6 | 0.7 | 5.7 | |
| S-rpy | 0.016 0 | 0.010 9 | 0.016 1 | 0.022 6 | 0.013 7 | 0.010 6 | 0.010 0 | 0.017 0 | 14.2 | 2.9 | 37.4 | 25.0 |
| 序列 | 相对平移误差/m | 本文算法的性能提升/% | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ORB-SLAM2 | 本文算法 | |||||||||||
| 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | |
| W-hs | 0.830 9 | 0.761 2 | 0.605 4 | 1.028 1 | 0.031 5 | 0.028 4 | 0.017 3 | 0.036 0 | 96.2 | 96.3 | 97.1 | 96.5 |
| W-rpy | 0.991 9 | 0.919 7 | 0.650 7 | 1.186 0 | 0.038 9 | 0.032 3 | 0.026 0 | 0.046 7 | 96.1 | 96.5 | 96.0 | 96.1 |
| W-static | 0.318 4 | 0.109 2 | 0.325 6 | 0.455 4 | 0.008 5 | 0.007 9 | 0.004 1 | 0.009 4 | 97.3 | 92.7 | 98.7 | 97.9 |
| W-xyz | 0.892 5 | 0.870 8 | 0.629 1 | 1.091 9 | 0.019 3 | 0.017 3 | 0.010 5 | 0.022 0 | 97.8 | 98.0 | 98.3 | 98.0 |
| S-hs | 0.020 7 | 0.016 5 | 0.017 6 | 0.027 2 | 0.020 4 | 0.017 1 | 0.015 2 | 0.025 4 | 1.6 | 13.6 | 6.5 | |
| S-rpy | 0.021 5 | 0.018 7 | 0.025 4 | 0.033 3 | 0.025 4 | 0.012 4 | 0.022 2 | 0.037 3 | 33.6 | 12.8 | ||
Tab. 2 Result comparison of translation error of relative pose error
| 序列 | 相对平移误差/m | 本文算法的性能提升/% | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ORB-SLAM2 | 本文算法 | |||||||||||
| 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | |
| W-hs | 0.830 9 | 0.761 2 | 0.605 4 | 1.028 1 | 0.031 5 | 0.028 4 | 0.017 3 | 0.036 0 | 96.2 | 96.3 | 97.1 | 96.5 |
| W-rpy | 0.991 9 | 0.919 7 | 0.650 7 | 1.186 0 | 0.038 9 | 0.032 3 | 0.026 0 | 0.046 7 | 96.1 | 96.5 | 96.0 | 96.1 |
| W-static | 0.318 4 | 0.109 2 | 0.325 6 | 0.455 4 | 0.008 5 | 0.007 9 | 0.004 1 | 0.009 4 | 97.3 | 92.7 | 98.7 | 97.9 |
| W-xyz | 0.892 5 | 0.870 8 | 0.629 1 | 1.091 9 | 0.019 3 | 0.017 3 | 0.010 5 | 0.022 0 | 97.8 | 98.0 | 98.3 | 98.0 |
| S-hs | 0.020 7 | 0.016 5 | 0.017 6 | 0.027 2 | 0.020 4 | 0.017 1 | 0.015 2 | 0.025 4 | 1.6 | 13.6 | 6.5 | |
| S-rpy | 0.021 5 | 0.018 7 | 0.025 4 | 0.033 3 | 0.025 4 | 0.012 4 | 0.022 2 | 0.037 3 | 33.6 | 12.8 | ||
| 序列 | 相对旋转误差/(°) | 本文算法的性能提升/% | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ORB-SLAM2 | 本文算法 | |||||||||||
| 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | |
| W-hs | 19.485 0 | 16.638 0 | 13.369 0 | 23.631 0 | 0.755 3 | 0.704 0 | 0.372 8 | 0.842 2 | 96.1 | 95.8 | 97.2 | 96.4 |
| W-rpy | 16.920 0 | 14.999 0 | 12.646 0 | 21.124 0 | 0.803 4 | 0.711 0 | 0.463 0 | 0.927 2 | 95.3 | 95.3 | 96.3 | 95.6 |
| W-static | 5.569 5 | 1.886 2 | 5.634 1 | 7.922 3 | 0.246 4 | 0.233 3 | 0.114 5 | 0.271 7 | 95.6 | 87.6 | 98.0 | 96.6 |
| W-xyz | 16.338 0 | 15.561 0 | 11.638 0 | 20.059 0 | 0.490 4 | 0.408 6 | 0.395 2 | 0.629 8 | 97.0 | 97.4 | 96.6 | 96.9 |
| S-hs | 0.661 3 | 0.624 3 | 0.307 8 | 0.729 4 | 0.633 5 | 0.596 4 | 0.294 4 | 0.698 5 | 4.2 | 4.5 | 4.3 | 4.2 |
| S-rpy | 0.783 1 | 0.666 3 | 0.512 1 | 0.935 7 | 0.751 0 | 0.641 3 | 0.510 1 | 0.921 7 | 4.1 | 3.8 | 0.4 | 1.5 |
Tab. 3 Result comparison of rotation error of relative pose error
| 序列 | 相对旋转误差/(°) | 本文算法的性能提升/% | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ORB-SLAM2 | 本文算法 | |||||||||||
| 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | |
| W-hs | 19.485 0 | 16.638 0 | 13.369 0 | 23.631 0 | 0.755 3 | 0.704 0 | 0.372 8 | 0.842 2 | 96.1 | 95.8 | 97.2 | 96.4 |
| W-rpy | 16.920 0 | 14.999 0 | 12.646 0 | 21.124 0 | 0.803 4 | 0.711 0 | 0.463 0 | 0.927 2 | 95.3 | 95.3 | 96.3 | 95.6 |
| W-static | 5.569 5 | 1.886 2 | 5.634 1 | 7.922 3 | 0.246 4 | 0.233 3 | 0.114 5 | 0.271 7 | 95.6 | 87.6 | 98.0 | 96.6 |
| W-xyz | 16.338 0 | 15.561 0 | 11.638 0 | 20.059 0 | 0.490 4 | 0.408 6 | 0.395 2 | 0.629 8 | 97.0 | 97.4 | 96.6 | 96.9 |
| S-hs | 0.661 3 | 0.624 3 | 0.307 8 | 0.729 4 | 0.633 5 | 0.596 4 | 0.294 4 | 0.698 5 | 4.2 | 4.5 | 4.3 | 4.2 |
| S-rpy | 0.783 1 | 0.666 3 | 0.512 1 | 0.935 7 | 0.751 0 | 0.641 3 | 0.510 1 | 0.921 7 | 4.1 | 3.8 | 0.4 | 1.5 |

Fig. 11 Photograph of laboratory environment
| 序列 | DS-SLAM | DynaSLAM | 本文算法 |
|---|---|---|---|
| W-hs | 0.030 3 | 0.025 | 0.025 6 |
| W-rpy | 0.444 2 | 0.040 | 0.032 4 |
| W-static | 0.008 1 | 0.009 | 0.006 7 |
| W-xyz | 0.024 7 | 0.015 | 0.015 1 |
Tab. 4 Comparison of absolute trajectory error of different algorithms
| 序列 | DS-SLAM | DynaSLAM | 本文算法 |
|---|---|---|---|
| W-hs | 0.030 3 | 0.025 | 0.025 6 |
| W-rpy | 0.444 2 | 0.040 | 0.032 4 |
| W-static | 0.008 1 | 0.009 | 0.006 7 |
| W-xyz | 0.024 7 | 0.015 | 0.015 1 |
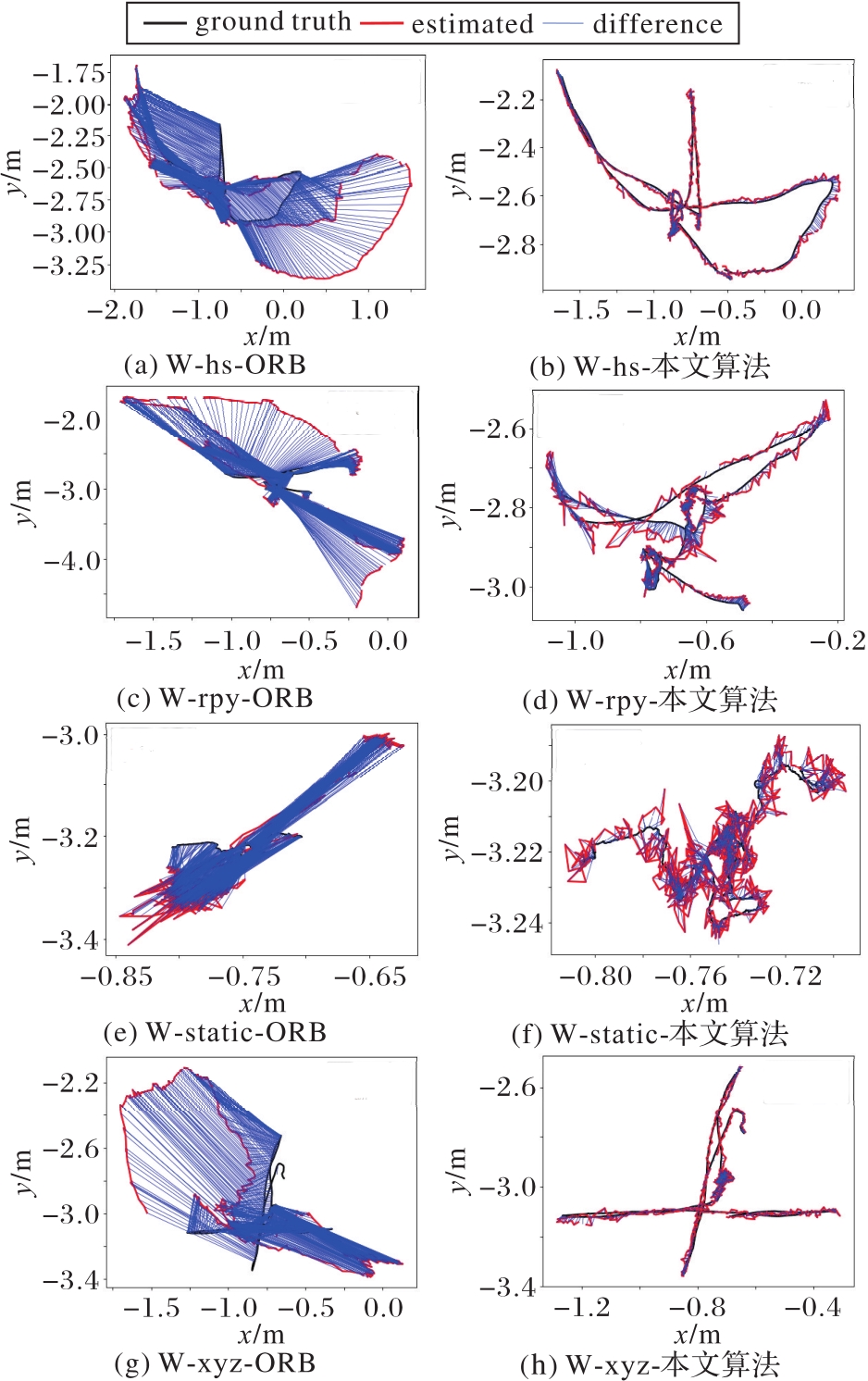
Fig. 12 Comparison of trajectories estimated by different algorithms in highly dynamic scenes

Fig. 13 Trajectories estimated by different algorithms in laboratory environment
| 模块 | 运行时间/ms |
|---|---|
| ORB特征提取 | 9.0 |
| 语义分割 | 169.4 |
| 动态特征点过滤 | 51.3 |
Tab. 5 Running times of different modules
| 模块 | 运行时间/ms |
|---|---|
| ORB特征提取 | 9.0 |
| 语义分割 | 169.4 |
| 动态特征点过滤 | 51.3 |

Fig. 14 Dense point cloud map

Fig. 15 Semantic map
| 轨迹 | 地图文件存储空间/MB | ||
|---|---|---|---|
| 点云地图 | 八叉树地图 | 稀疏语义地图 | |
| W-xyz | 13.3 | 0.37 | 0.004 |
| W-static | 15.5 | 0.18 | 0.004 |
Tab. 6 Comparison of map file storage space
| 轨迹 | 地图文件存储空间/MB | ||
|---|---|---|---|
| 点云地图 | 八叉树地图 | 稀疏语义地图 | |
| W-xyz | 13.3 | 0.37 | 0.004 |
| W-static | 15.5 | 0.18 | 0.004 |
| 1 | 权美香,朴松昊,李国.视觉SLAM综述[J].智能系统学报,2016,11(6):768-776. 10.11992/tis.201607026 |
| QUAN M X, PIAO S H, LI G. An overview of visual SLAM [J]. CAAI Transactions on Intelligent Systems, 2016, 11(6): 768-776. 10.11992/tis.201607026 | |
| 2 | BRAHMBHATT S, GU J W, KIM K, et al. Geometry-aware learning of maps for camera localization [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 2616-2625. 10.1109/cvpr.2018.00277 |
| 3 | 付梦印,吕宪伟,刘彤,等.基于RGB-D数据的实时SLAM算法[J].机器人,2015,37(6):683-692. 10.13973/j.cnki.robot.2015.0683 |
| FU M Y, LYU X W, LIU T, et al. Real-time SLAM algorithm based on RGB-D data [J]. Robot, 2015, 37(6): 683-692. 10.13973/j.cnki.robot.2015.0683 | |
| 4 | CADENA C, CARLONE L, CARRILLO H, et al. Past, present, and future of simultaneous localization and mapping: toward the robust-perception age [J]. IEEE Transactions on Robotics, 2016, 32(6): 1309-1332. 10.1109/TRO.2016.2624754 |
| 5 | FANG Y Q, DAI B. An improved moving target detecting and tracking based on Optical Flow technique and Kalman filter [C]// Proceedings of the 2009 4th International Conference on Computer Science and Education. Piscataway: IEEE, 2009: 1197-1202. 10.1109/iccse.2009.5228464 |
| 6 | WANG Y B, HUANG S D. Towards dense moving object segmentation based robust dense RGB-D SLAM in dynamic scenarios [C]// Proceedings of the 2014 13th International Conference on Control Automation Robotics and Vision. Piscataway: IEEE, 2014: 1841-1846. 10.1109/icarcv.2014.7064596 |
| 7 | BAKKAY M C, ARAFA M, ZAGROUBA E. Dense 3D SLAM in dynamic scenes using Kinect [C]// Proceedings of the 2015 7th Iberian Conference on Pattern Recognition and Image Analysis, LNCS9117. Cham: Springer, 2015: 121-129. |
| 8 | ZHAO L L, LIU Z L, CHEN J W, et al. A compatible framework for RGB-D SLAM in dynamic scenes [J]. IEEE Access, 2019, 7: 75604-75614. 10.1109/access.2019.2922733 |
| 9 | BADRINARAYANAN V, KENDALL A, CIPOLLA R. SegNet: a deep convolutional encoder-decoder architecture for image segmentation [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(12): 2481-2495. 10.1109/tpami.2016.2644615 |
| 10 | CHEN L C, PAPANDREOU G, KOKKINOS I, et al. DeepLab: semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected CRFs [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(4): 834-848. 10.1109/tpami.2017.2699184 |
| 11 | HE K M, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN [C]// Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2017: 2980-2988. 10.1109/iccv.2017.322 |
| 12 | ZHONG F W, WANG S, ZHANG Z Q, et al. Detect-SLAM: making object detection and SLAM mutually beneficial [C]// Proceedings of the 2018 IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE, 2018: 1001-1010. 10.1109/wacv.2018.00115 |
| 13 | BESCOS B, FÁCIL J M, CIVERA J, et al. DynaSLAM: tracking, mapping and inpainting in dynamic scenes [J]. IEEE Robotics and Automation Letters, 2018, 3(4): 4076-4083. 10.1109/lra.2018.2860039 |
| 14 | YU C, LIU Z X , LIU X J, et al. DS-SLAM: a semantic visual SLAM towards dynamic environments [C]// Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2018: 1168-1174. 10.1109/iros.2018.8593691 |
| 15 | HORNUNG A, WURM K M, BENNEWITZ M, et al. OctoMap: an efficient probabilistic 3D mapping framework based on octrees [J]. Autonomous Robots, 2013, 34(3): 189-206. 10.1007/s10514-012-9321-0 |
| 16 | WEINZAEPFEL P, REVAUD J, HARCHAOUI Z, et al. DeepFlow: large displacement optical flow with deep matching [C]// Proceedings of the 2013 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2013: 1385-1392. 10.1109/iccv.2013.175 |
| [1] | Wei LI, Ling CHEN, Xiuyuan XU, Min ZHU, Jixiang GUO, Kai ZHOU, Hao NIU, Yuchen ZHANG, Shanye YI, Yi ZHANG, Fengming LUO. Interstitial lung disease segmentation algorithm based on multi-task learning [J]. Journal of Computer Applications, 2024, 44(4): 1285-1293. |
| [2] | Boyue WANG, Yingxiang LI, Jiandan ZHONG. Segmentation network for day and night ground-based cloud images based on improved Res-UNet [J]. Journal of Computer Applications, 2024, 44(4): 1310-1316. |
| [3] | Pengfei ZHANG, Litao HAN, Hengjian FENG, Hongmei LI. Point cloud semantic segmentation based on attention mechanism and global feature optimization [J]. Journal of Computer Applications, 2024, 44(4): 1086-1092. |
| [4] | Ning WU, Yangyang LUO, Huajie XU. Semantic segmentation method for remote sensing images based on multi-scale feature fusion [J]. Journal of Computer Applications, 2024, 44(3): 737-744. |
| [5] | Yongjiang LIU, Bin CHEN. Pixel-level unsupervised industrial anomaly detection based on multi-scale memory bank [J]. Journal of Computer Applications, 2024, 44(11): 3587-3594. |
| [6] | Ziyi LI, Tingting QU, Qianpeng CHONG, Jindong XU. Remote sensing image segmentation network based on fuzzy multiscale features [J]. Journal of Computer Applications, 2024, 44(11): 3581-3586. |
| [7] | Qiumei ZHENG, Weiwei NIU, Fenghua WANG, Dan ZHAO. Dual-branch real-time semantic segmentation network based on detail enhancement [J]. Journal of Computer Applications, 2024, 44(10): 3058-3066. |
| [8] | Xukang KAN, Gefei SHI, Xuerong YANG. ORB-SLAM2 algorithm based on dynamic feature point filtering and optimization of keyframe selection [J]. Journal of Computer Applications, 2024, 44(10): 3185-3190. |
| [9] | Jia WANG-ZHU, Zhou YU, Jun YU, Jianping FAN. Video dynamic scene graph generation model based on multi-scale spatial-temporal Transformer [J]. Journal of Computer Applications, 2024, 44(1): 47-57. |
| [10] | Di ZHOU, Zili ZHANG, Jia CHEN, Xinrong HU, Ruhan HE, Jun ZHANG. Stomach cancer image segmentation method based on EfficientNetV2 and object-contextual representation [J]. Journal of Computer Applications, 2023, 43(9): 2955-2962. |
| [11] | Shuai ZHENG, Xiaolong ZHANG, He DENG, Hongwei REN. 3D liver image segmentation method based on multi-scale feature fusion and grid attention mechanism [J]. Journal of Computer Applications, 2023, 43(7): 2303-2310. |
| [12] | Bin LU, Jielin LIU. Semantic segmentation for 3D point clouds based on feature enhancement [J]. Journal of Computer Applications, 2023, 43(6): 1818-1825. |
| [13] | Quan YUAN, Yunpeng XU, Chengliang TANG. Document-level relation extraction method based on path labels [J]. Journal of Computer Applications, 2023, 43(4): 1029-1035. |
| [14] | Xuedong HE, Shibin XUAN, Kuan WANG, Mengnan CHEN. DeepLabV3+ image segmentation algorithm fusing cumulative distribution function and channel attention mechanism [J]. Journal of Computer Applications, 2023, 43(3): 936-942. |
| [15] | Feiyu LIAN, Liang ZHANG, Jiedong WANG, Yukang JIN, Yu CHAI. Outdoor scene point cloud segmentation model based on graph model and attention mechanism [J]. Journal of Computer Applications, 2023, 43(12): 3911-3917. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||