


Journal of Computer Applications ›› 2025, Vol. 45 ›› Issue (1): 325-336.DOI: 10.11772/j.issn.1001-9081.2023121827
• Frontier and comprehensive applications • Previous Articles Next Articles
Wenbo CHE1, Jianhua WANG1( ), Xiang ZHENG1, Gongxing WU1, Shun ZHANG2, Haozhu WANG1
), Xiang ZHENG1, Gongxing WU1, Shun ZHANG2, Haozhu WANG1
Received:2024-01-02
Revised:2024-04-02
Accepted:2024-04-07
Online:2024-04-19
Published:2025-01-10
Contact:
Jianhua WANG
About author:CHE Wenbo, born in 1999, M. S. candidate. His research interests include control of unmanned surface vehicle, visual detection positioning and navigation.Supported by:
车文博1, 王建华1(), 郑翔1, 吴恭兴1, 张舜2, 王浩铸1
通讯作者:
王建华
作者简介:车文博(1999—),男,山东威海人,硕士研究生,主要研究方向:无人水面艇控制、视觉检测定位与导航;基金资助:CLC Number:
Wenbo CHE, Jianhua WANG, Xiang ZHENG, Gongxing WU, Shun ZHANG, Haozhu WANG. Cooperative visual positioning method of multiple unmanned surface vehicles in subterranean closed water body[J]. Journal of Computer Applications, 2025, 45(1): 325-336.
车文博, 王建华, 郑翔, 吴恭兴, 张舜, 王浩铸. 地下封闭水体内多无人艇协同的视觉定位方法[J]. 《计算机应用》唯一官方网站, 2025, 45(1): 325-336.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2023121827

Fig. 1 Application scene
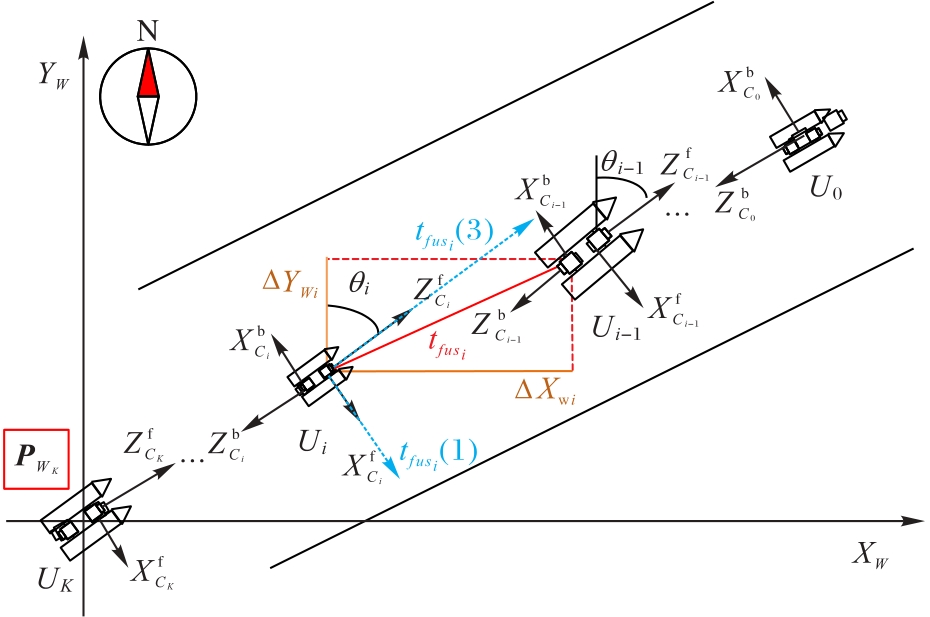
Fig. 2 Schematic diagram of cooperative visual positioning of multiple USVs
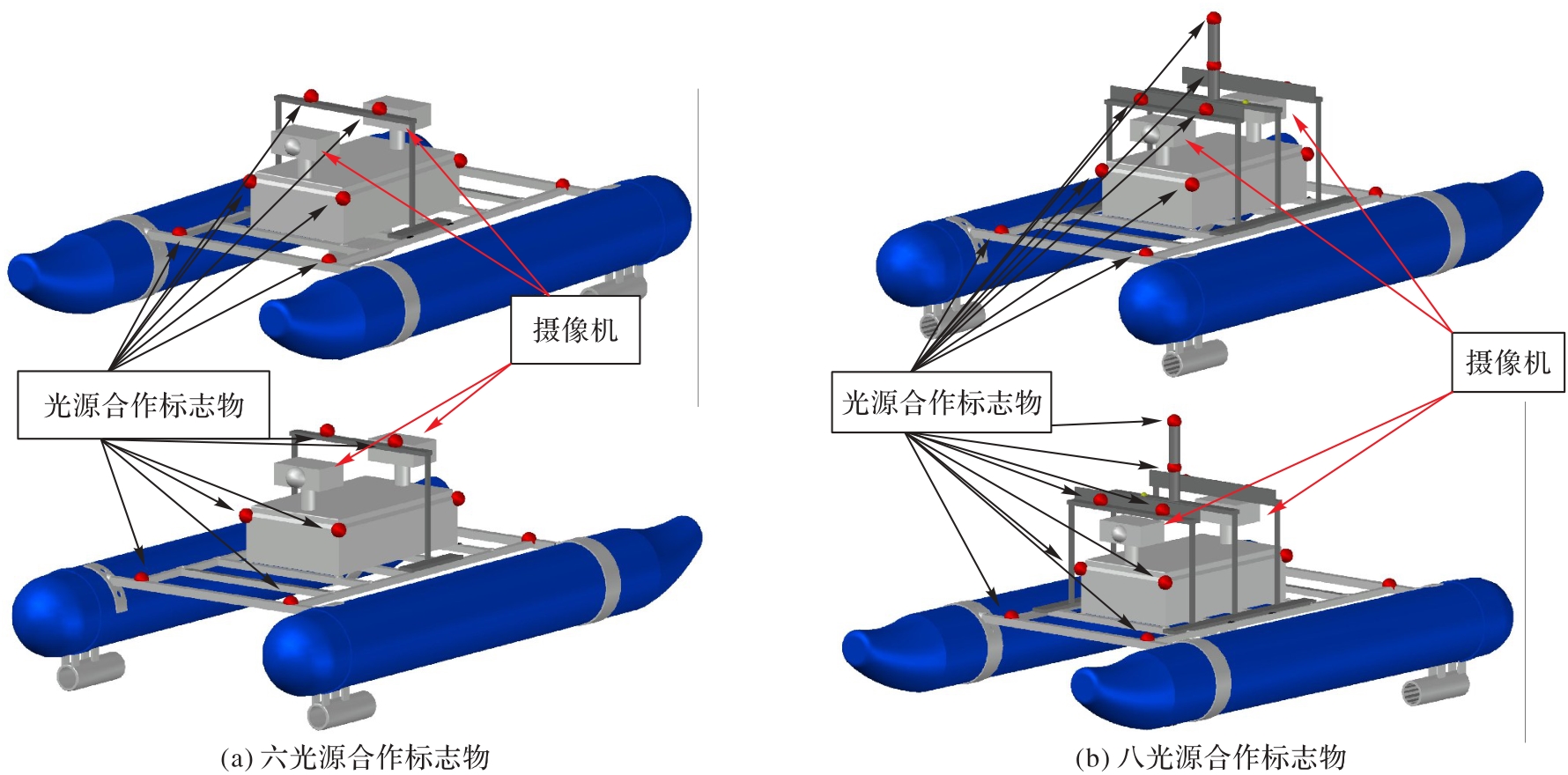
Fig. 3 Cooperative marker structures
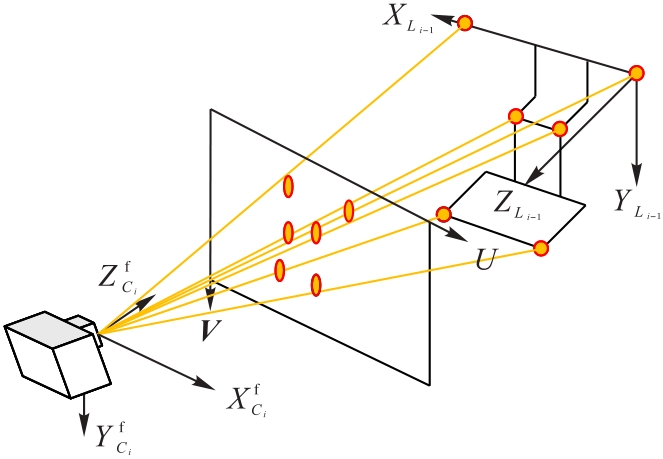
Fig. 4 Cooperative marker projection process
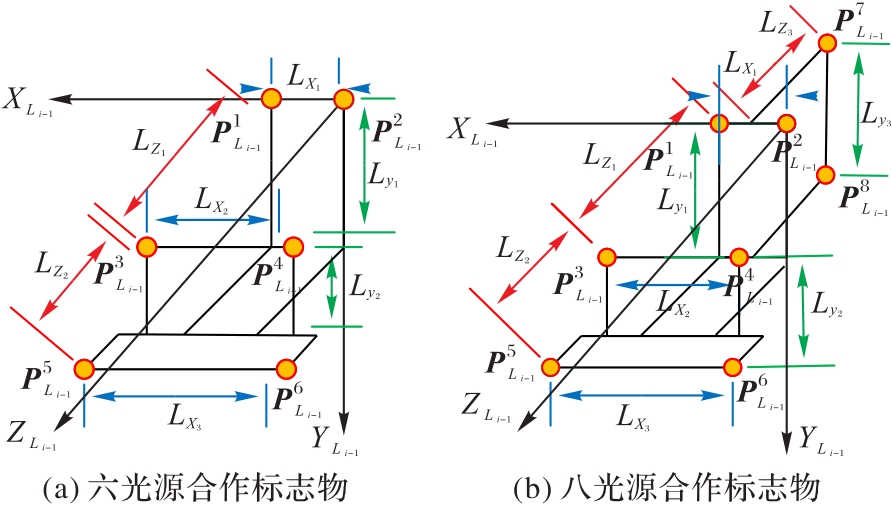
Fig. 5 Design of cooperative markers
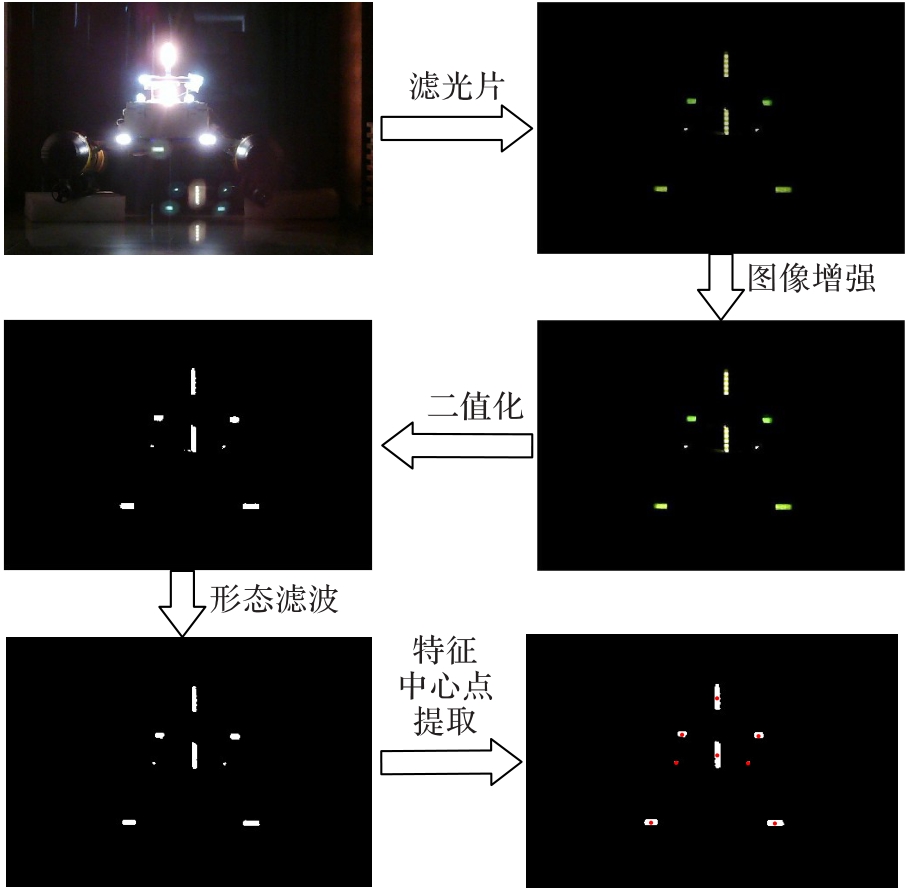
Fig. 6 Image processing flow

Fig. 7 Relative positions solved with unoptimized cooperative markers
| 序号 | N | Lz1/m | Lz2/m | Lz3/m | |
|---|---|---|---|---|---|
| 1 | 6 | 0.10 | 0.25 | 20.00 | |
| 2 | 6 | 0.15 | 0.20 | 6.00 | |
| 3 | 6 | 0.10 | 0.30 | 15.00 | |
| 4 | 6 | 0.15 | 0.25 | 10.00 | |
| 5 | 8 | 0.10 | 0.25 | 0.60 | 0.60 |
| 6 | 8 | 0.10 | 0.20 | 0.45 | 0.80 |
| 7 | 8 | 0.10 | 0.40 | 0.20 | 0.40 |
| 8 | 8 | 0.08 | 0.22 | 0.55 | 0.20 |
| 9 | 8 | 0.05 | 0.20 | 0.50 | 0.50 |
| 10 | 8 | 0.10 | 0.25 | 0.25 | 4.00 |
Tab. 1 Optimization of marker structure parameters
| 序号 | N | Lz1/m | Lz2/m | Lz3/m | |
|---|---|---|---|---|---|
| 1 | 6 | 0.10 | 0.25 | 20.00 | |
| 2 | 6 | 0.15 | 0.20 | 6.00 | |
| 3 | 6 | 0.10 | 0.30 | 15.00 | |
| 4 | 6 | 0.15 | 0.25 | 10.00 | |
| 5 | 8 | 0.10 | 0.25 | 0.60 | 0.60 |
| 6 | 8 | 0.10 | 0.20 | 0.45 | 0.80 |
| 7 | 8 | 0.10 | 0.40 | 0.20 | 0.40 |
| 8 | 8 | 0.08 | 0.22 | 0.55 | 0.20 |
| 9 | 8 | 0.05 | 0.20 | 0.50 | 0.50 |
| 10 | 8 | 0.10 | 0.25 | 0.25 | 4.00 |

Fig. 8 Relative positions solved with optimized cooperative markers
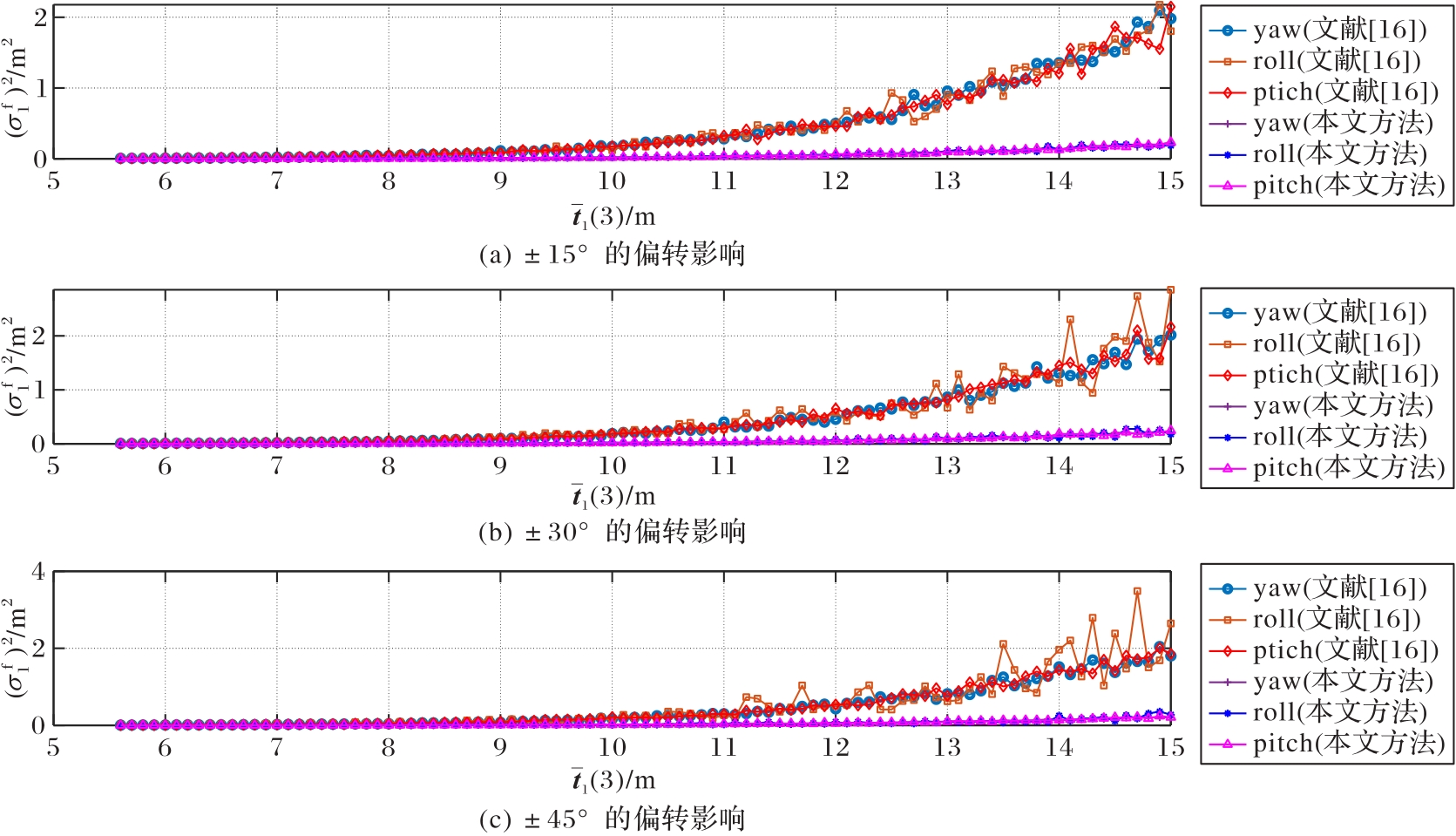
Fig. 9 Relative position errors under influence of rotations
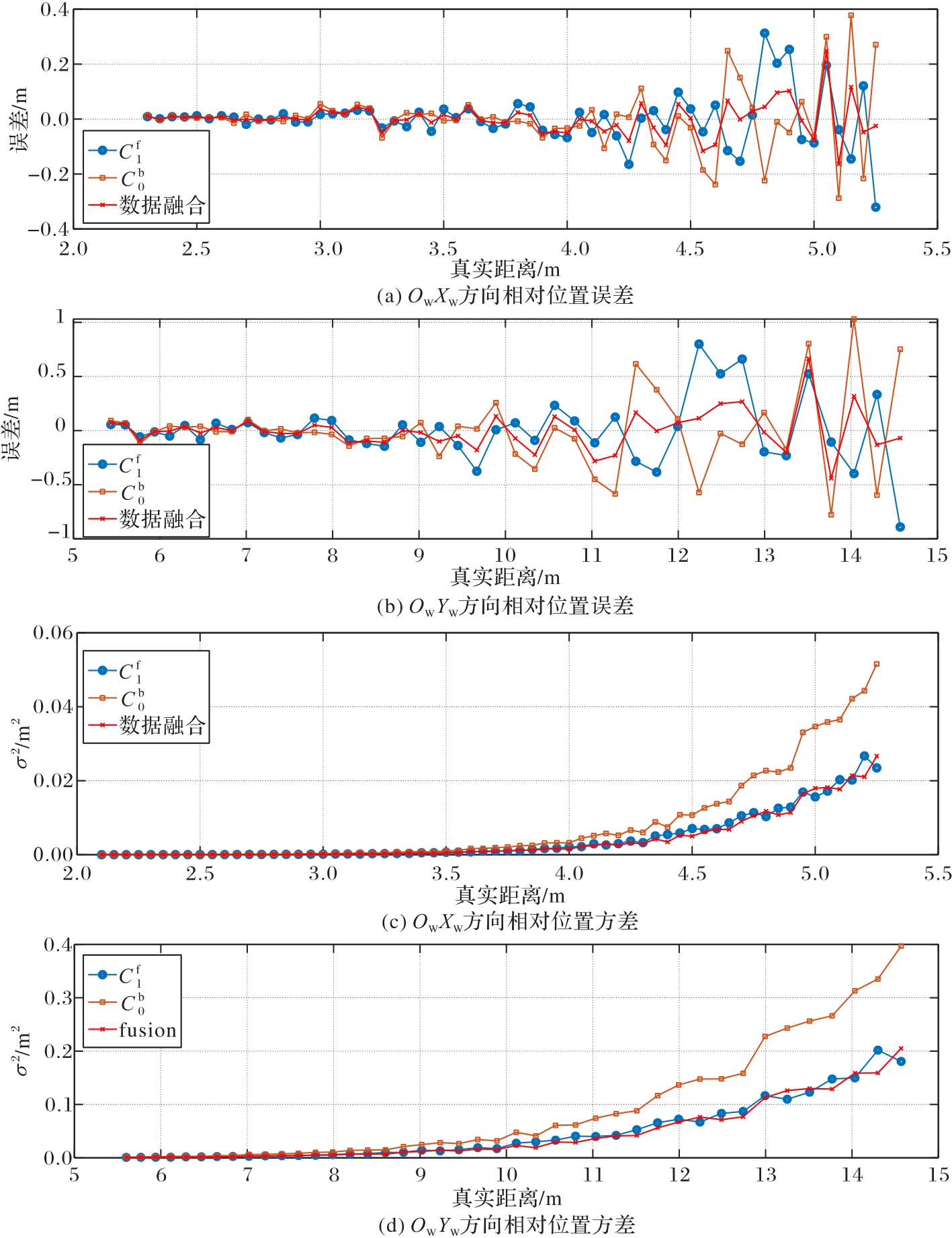
Fig. 10 Analysis of data fusion effect
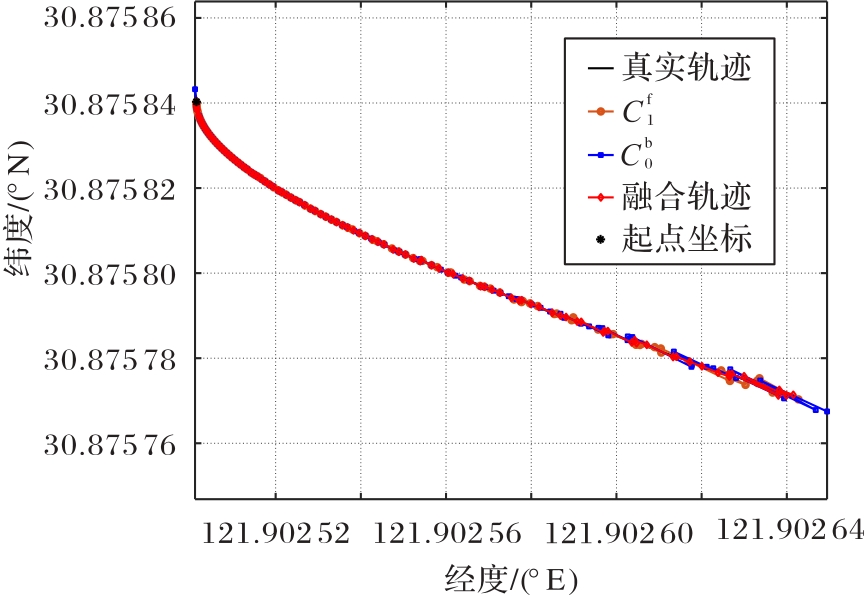
Fig. 11 Absolute positioning trajectory
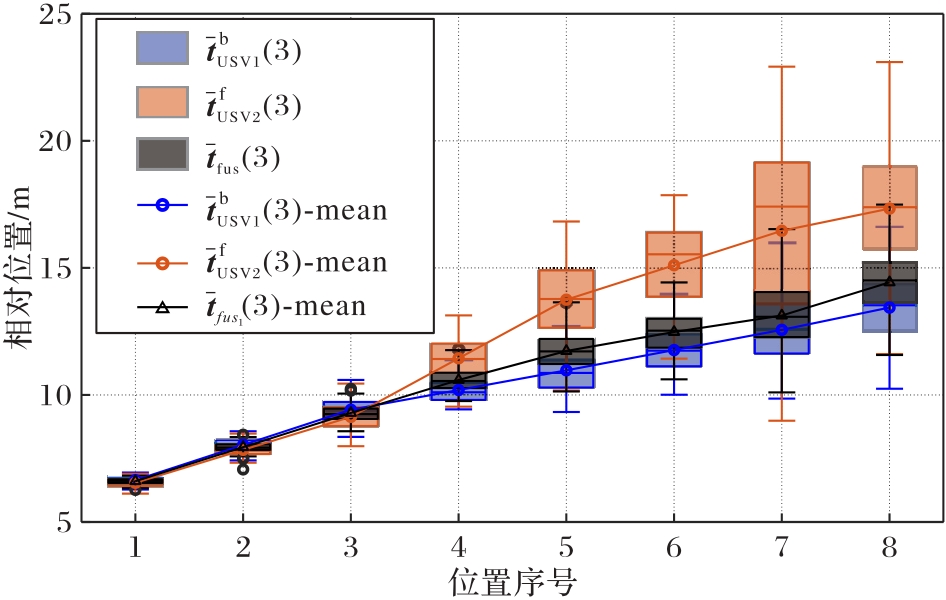
Fig. 12 Box plot of relative position results
| 位置序号 | 均值/m | 方差/m2 | 相对误差/% | ||||
|---|---|---|---|---|---|---|---|
| 1 | 6.65 | 6.54 | 6.61 | 0.02 | 0.03 | 0.01 | 1.6 |
| 2 | 8.03 | 7.84 | 7.95 | 0.06 | 0.07 | 0.03 | 2.1 |
| 3 | 9.42 | 9.14 | 9.30 | 0.21 | 0.26 | 0.11 | 3.5 |
| 4 | 10.20 | 11.44 | 10.59 | 0.25 | 0.55 | 0.18 | 4.0 |
| 5 | 10.97 | 13.75 | 11.73 | 0.72 | 1.93 | 0.50 | 6.0 |
| 6 | 11.77 | 15.10 | 12.48 | 0.72 | 2.62 | 0.55 | 5.9 |
| 7 | 12.55 | 16.46 | 13.13 | 1.77 | 10.32 | 1.56 | 9.5 |
| 8 | 13.44 | 17.33 | 14.43 | 1.82 | 5.29 | 1.51 | 8.5 |
Tab. 2 Solution results of static experiments
| 位置序号 | 均值/m | 方差/m2 | 相对误差/% | ||||
|---|---|---|---|---|---|---|---|
| 1 | 6.65 | 6.54 | 6.61 | 0.02 | 0.03 | 0.01 | 1.6 |
| 2 | 8.03 | 7.84 | 7.95 | 0.06 | 0.07 | 0.03 | 2.1 |
| 3 | 9.42 | 9.14 | 9.30 | 0.21 | 0.26 | 0.11 | 3.5 |
| 4 | 10.20 | 11.44 | 10.59 | 0.25 | 0.55 | 0.18 | 4.0 |
| 5 | 10.97 | 13.75 | 11.73 | 0.72 | 1.93 | 0.50 | 6.0 |
| 6 | 11.77 | 15.10 | 12.48 | 0.72 | 2.62 | 0.55 | 5.9 |
| 7 | 12.55 | 16.46 | 13.13 | 1.77 | 10.32 | 1.56 | 9.5 |
| 8 | 13.44 | 17.33 | 14.43 | 1.82 | 5.29 | 1.51 | 8.5 |
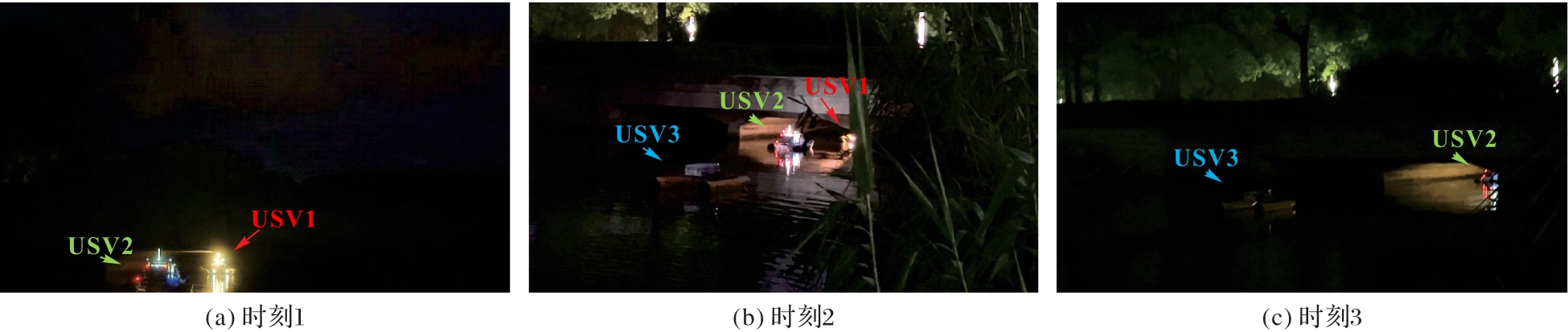
Fig. 13 Experimental scene
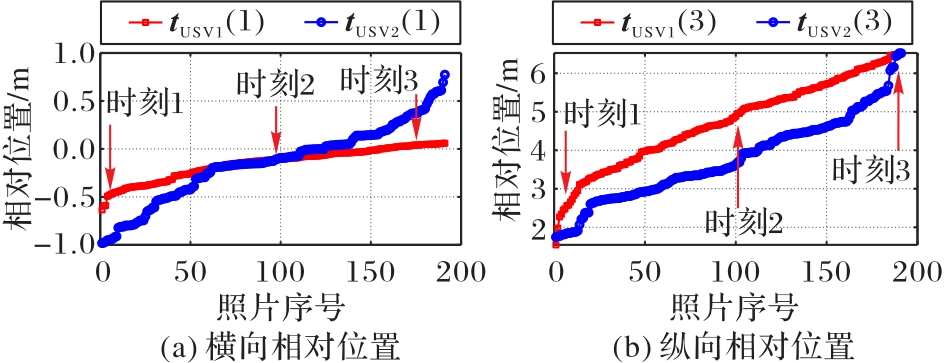
Fig. 14 Relative positions between vehicles
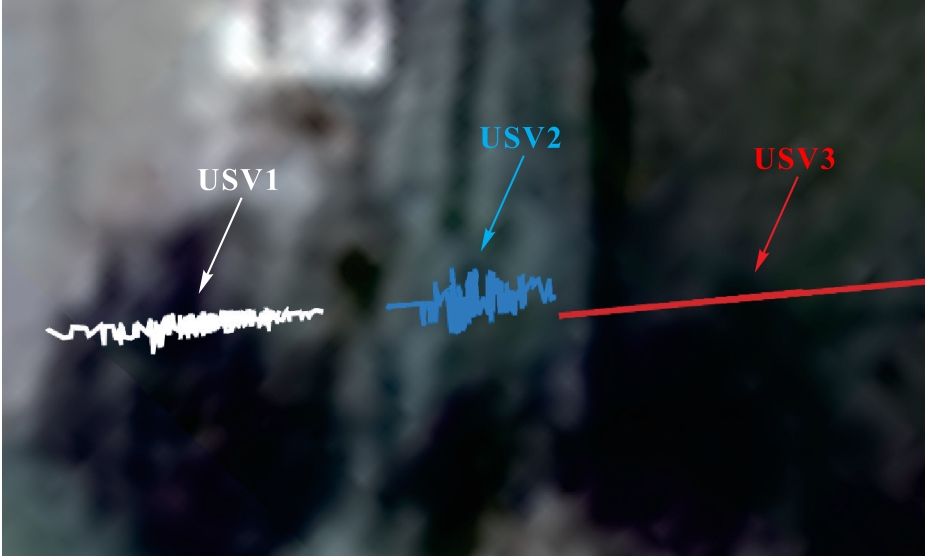
Fig. 15 Absolute positioning trajectories of USV1 and USV2
| 1 | 杨一烽,杜炯,张欣.国内地下式污水处理厂的发展现状和关键技术分析[J].净水技术, 2021, 40(10): 101-106. |
| YANG Y F, DU J, ZHANG X. Development status and key technology analysis of Underground WasteWater Treatment Plants (UWWTPs) at home [J]. Water Purification Technology, 2021, 40(10): 101-106. | |
| 2 | 李滨.智能巡检机器人系统在地下式污水处理厂的运用[J].自动化应用, 2020(4): 77-79. |
| LI B. Application of intelligent inspection robot system in underground sewage treatment plant [J]. Automation Application, 2020(4): 77-79. | |
| 3 | WANG X, SONG X, DU L. Review and application of unmanned surface vehicle in China [C]// Proceedings of the 5th International Conference on Transportation Information and Safety. Piscataway: IEEE, 2019: 1476-1481. |
| 4 | ZHEN W, SCHERER S. Estimating the localizability in tunnel-like environments using LiDAR and UWB [C]// Proceedings of the 2019 International Conference on Robotics and Automation. Piscataway: IEEE, 2019: 4903-4908. |
| 5 | TAGLIABUE A, TORDESILLAS J, CAI X, et al. LION: lidar-inertial observability-aware navigator for vision-denied environments [C]// Proceedings of the 2020 International Symposium on Experimental Robotics, SPAR 19. Cham: Springer, 2021: 380-390. |
| 6 | 杨港顺.基于UWB信号的地下遮蔽空间信道建模和定位研究[D].北京:北京邮电大学, 2022: 9-24. |
| YANG G S. Research on channel modeling and localization of UWB signal in the underground space [D]. Beijing: Beijing University of Posts and Telecommunications, 2022: 9-24. | |
| 7 | 赵冬青,畅雅雯,单彦虎,等.双目测量系统的室内定位与重建[J].激光杂志, 2022, 43(1): 19-23. |
| ZHAO D Q, CHANG Y W, SHAN Y H, et al. Indoor positioning and reconstruction of the binocular measurement system [J]. Laser Journal, 2022, 43(1): 19-23. | |
| 8 | 何红坤,王宁,张富宇,等.水面无人艇单目视觉伺服自主控制研究综述[J].中国舰船研究, 2024, 19(1): 15-28. |
| HE H K, WANG N, ZHANG F Y, et al. Review of research on monocular visual servo-based autonomous control of unmanned surface vehicles [J]. Chinese Journal of Ship Research, 2024, 19(1): 15-28. | |
| 9 | 王榆钦.弱光照环境下的视觉定位技术研究[D].厦门:厦门大学, 2020: 11-21. |
| WANG Y Q. Research on visual positioning technology under low illumination environment [D]. Xiamen: Xiamen University, 2020: 11-21. | |
| 10 | ALZUHIRI M, LI Z, RAO A, et al. IMU-assisted robotic structured light sensing with featureless registration under uncertainties for pipeline inspection [J]. NDT and E International, 2023, 139: No.102936. |
| 11 | ZHANG D, YANG G, JI J, et al. Pose measurement and motion estimation of non-cooperative satellite based on spatial circle feature [J]. Advances in Space Research, 2023, 71(3): 1721-1734. |
| 12 | 赵连军.基于目标特征的单目视觉位置姿态测量技术研究[D].成都:中国科学院研究生院(中国科学院光电技术研究所), 2014: 2-53. |
| ZHAO L J. Research on mono-vision pose measurement based on features of target [D]. Chengdu: University of Chinese Academy of Sciences (Institute of Optics and Electronics, Chinese Academy of Sciences), 2014: 2-53. | |
| 13 | 赵丽科.单目视觉的刚体运动目标位姿测量方法研究[D].武汉:武汉大学, 2018: 14-41. |
| ZHAO L K. Research on measurement method of rigid object position and orientation based on monocular vision [D]. Wuhan: Wuhan University, 2018: 14-41. | |
| 14 | 王保丰,李广云,陈继华,等.航天器交会对接中测量靶标的两种设计方法[J].宇航学报, 2008, 29(1): 162-166. |
| WANG B F, LI G Y, CHEN J H, et al. Two methods of coded targets used in rendezvous and docking [J]. Journal of Astronautics, 2008, 29(1): 162-166. | |
| 15 | 吕耀宇.空间合作目标单目视觉位姿测量技术研究[D].长春:中国科学院大学(中国科学院长春光学精密机械与物理研究所), 2018: 23-61. |
| LYU Y Y. Research on mono-vision pose measurement for space cooperative target [D]. Changchun: University of Chinese Academy of Sciences (Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences), 2018: 23-61. | |
| 16 | ABDEL-AZIZ Y I, KARARA H M. Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry [J]. Photogrammetric Engineering and Remote Sensing, 2015, 81(2): 103-107. |
| 17 | 吴福朝,胡占义. PnP问题的线性求解算法[J].软件学报, 2003, 14(3): 682-688. |
| WU F C, HU Z Y. A linear method for the PnP problem [J]. Journal of Software, 2003, 14(3): 682-688. | |
| 18 | 王平,周雪峰,安爱民,等.一种鲁棒且线性的PnP问题求解方法[J].仪器仪表学报, 2020, 41(9): 271-280. |
| WANG P, ZHOU X F, AN A M, et al. Robust and linear solving method for Perspective-n-Point problem [J]. Chinese Journal of Scientific Instrument, 2020, 41(9): 271-280. | |
| 19 | 何帅民,陈皓,王振宇.基于PnP算法的单目视觉位移测量方法[J].新技术新工艺, 2023(6): 46-52. |
| HE S M, CHEN H, WANG Z Y. Displacement measurement method of monocular vision based on PnP algorithm [J]. New Technology and New Process, 2023(6): 46-52. | |
| 20 | 李占旗,高继东,彭凯,等.基于PnP算法的前方车辆测距方法[J].国外电子测量技术, 2020, 39(12): 104-108. |
| LI Z Q, GAO J D, PENG K, et al. Method of measurement vehicle distance based on PnP [J]. Foreign Electronic Measurement Technology, 2020, 39(12): 104-108. | |
| 21 | 黄双发,周乐来,李贻斌.基于视觉的移动机器人相对位姿优化估计[J].无人系统技术, 2023, 6(4): 104-112. |
| HUANG S F, ZHOU L L, LI Y B. Vision-based relative pose estimation for mobile robots [J]. Unmanned Systems Technology, 2023, 6(4): 104-112. | |
| 22 | TULLY S, KANTOR G, CHOSET H. Leap-frog path design for multi-robot cooperative localization [M]// HOWARD A, IAGNEMMA K, KELLY A. Field and service robotics: results of the 7th international conference, STAR 62. Berlin: Springer, 2010: 307-317. |
| 23 | ZHANG Z. Flexible camera calibration by viewing a plane from unknown orientations [C]// Proceedings of the 7th IEEE International Conference on Computer Vision. Piscataway: IEEE, 1999: 666-673. |
| [1] | Gaofeng PAN, Yuan FAN, Yu RU, Yuchao GUO. Low-texture monocular visual simultaneous localization and mapping algorithm based on point-line feature fusion [J]. Journal of Computer Applications, 2022, 42(7): 2170-2176. |
| [2] | TONG Xinchi, ZHANG Huajun, GUO Hang. Multi-directional path planning algorithm for unmanned surface vehicle [J]. Journal of Computer Applications, 2020, 40(11): 3373-3378. |
| [3] | YUAN Meng'en, CHEN Lijia, FENG Zikai. Path planning algorithm of multi-population particle swarm manipulator based on monocular vision [J]. Journal of Computer Applications, 2020, 40(10): 2863-2871. |
| [4] | ZHANG Wuyang, ZHANG Wei, SONG Fang, LONG Lin. Monocular vision obstacle avoidance method for quadcopter based on deep learning [J]. Journal of Computer Applications, 2019, 39(4): 1001-1005. |
| [5] | LUO Yuyang, XU Weimin, ZHANG Mengjie, LIU Yuqiang. Space positioning method of bridge crane payload based on monocular vision [J]. Journal of Computer Applications, 2016, 36(4): 1156-1162. |
| [6] | HE Shao-jia LIU Zi-yang SHI Jian-qing. Obstacle detection of indoor robots based on monocular vision [J]. Journal of Computer Applications, 2012, 32(09): 2556-2559. |
| [7] | . Monocular vision-based vehicle collision warning system [J]. Journal of Computer Applications, 2007, 27(8): 2056-2058. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||