


Journal of Computer Applications ›› 2026, Vol. 46 ›› Issue (6): 1956-1964.DOI: 10.11772/j.issn.1001-9081.2025060733
• Multimedia computing and computer simulation • Previous Articles
Wei WANG, Jiaxin LIU( ), Wanni XIANG, Hua CUI, Yangguang LI
), Wanni XIANG, Hua CUI, Yangguang LI
Received:2025-07-04
Revised:2025-09-22
Accepted:2025-09-29
Online:2025-10-13
Published:2026-06-10
Contact:
Jiaxin LIU
About author:WANG Wei, born in 1984, Ph. D., associate professor. His research interests include 3D detection.Supported by:
王伟, 刘佳欣(), 向婉妮, 崔华, 李阳光
通讯作者:
刘佳欣
作者简介:王伟(1984—),男,江苏徐州人,副教授,博士,CCF会员,主要研究方向:三维检测基金资助:CLC Number:
Wei WANG, Jiaxin LIU, Wanni XIANG, Hua CUI, Yangguang LI. Horizon detection method for cross-camera bird’s-eye view road alignment[J]. Journal of Computer Applications, 2026, 46(6): 1956-1964.
王伟, 刘佳欣, 向婉妮, 崔华, 李阳光. 面向跨相机鸟瞰视角道路对齐的地平线检测方法[J]. 《计算机应用》唯一官方网站, 2026, 46(6): 1956-1964.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2025060733
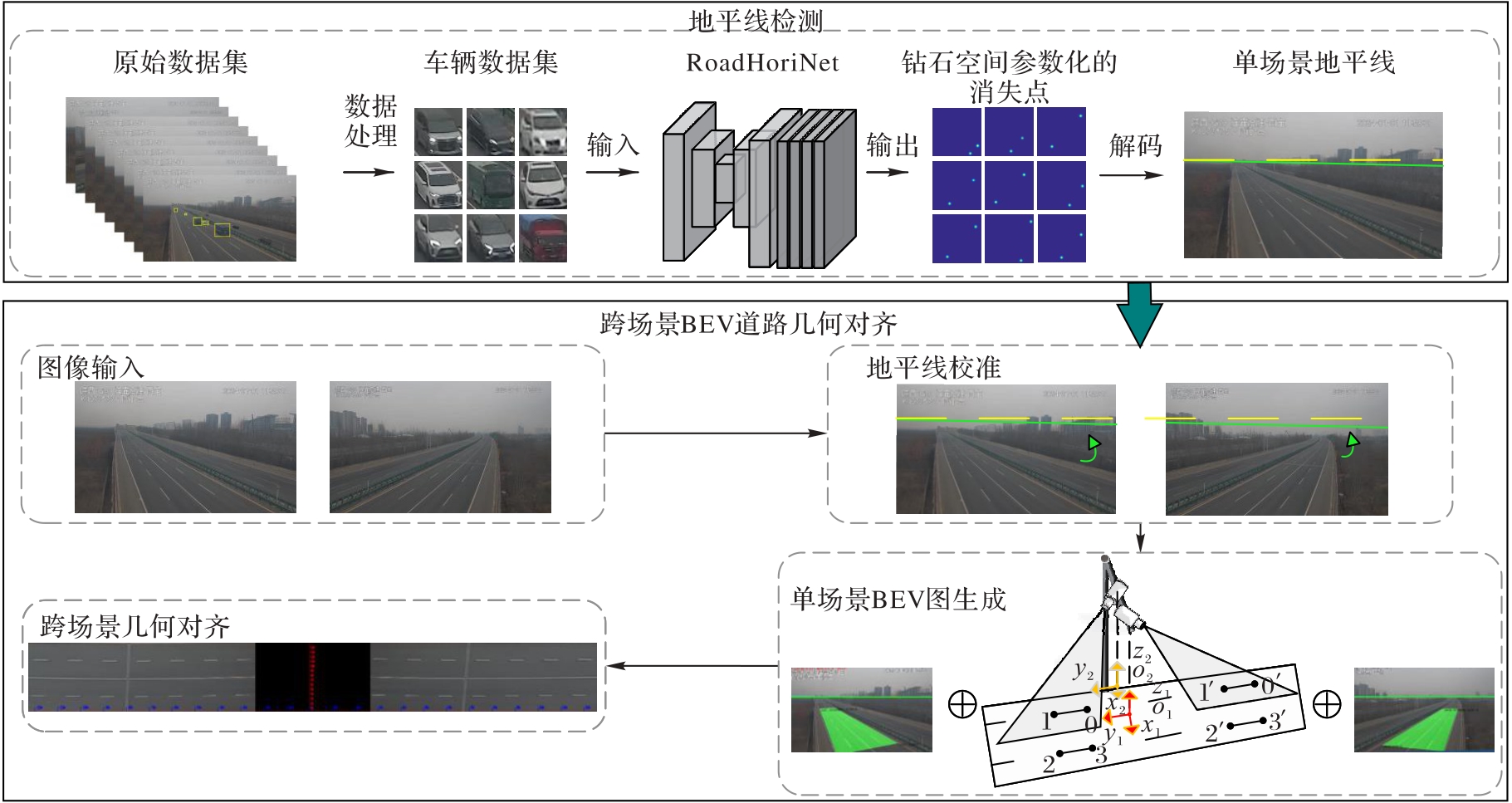
Fig. 1 Overall flow of proposed method
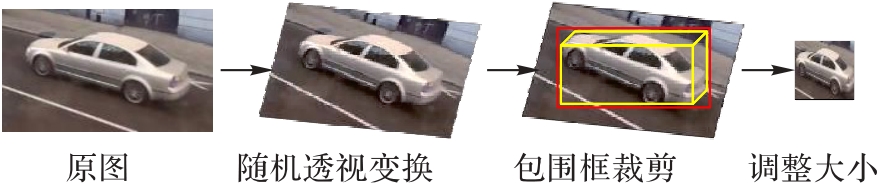
Fig. 2 Data preprocessing
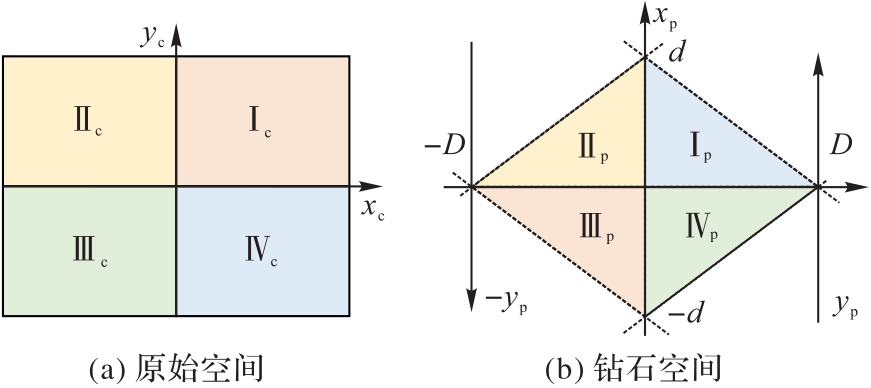
Fig. 3 Image-to-diamond space mapping diagram
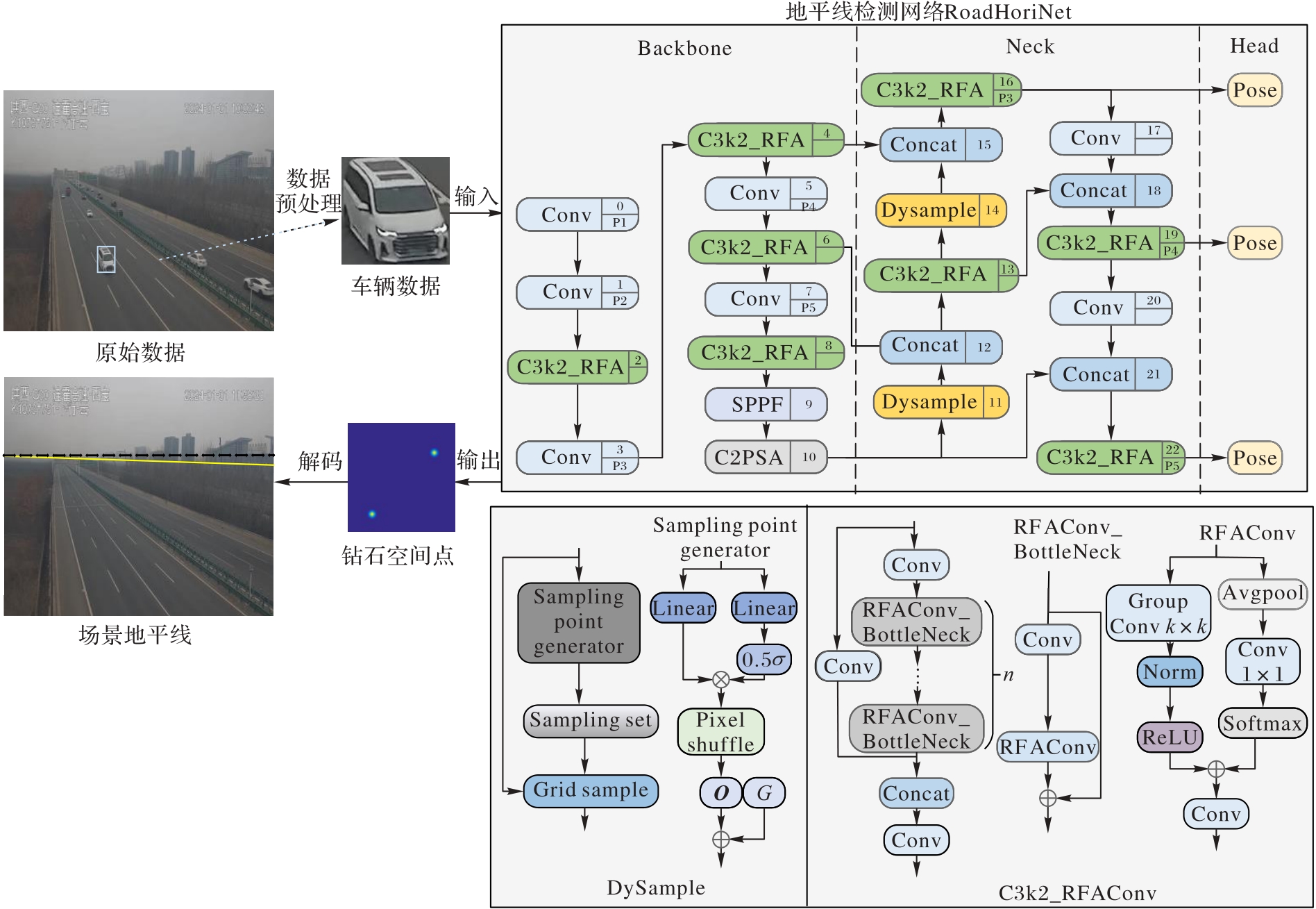
Fig. 4 Horizon detection flow and network structure
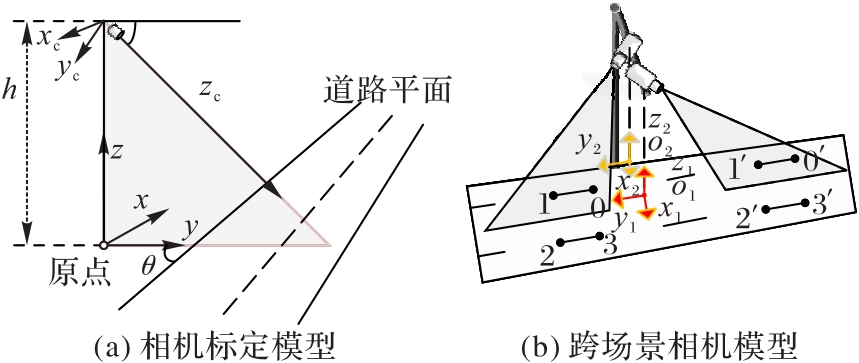
Fig. 5 Camera calibration and cross-scene camera models
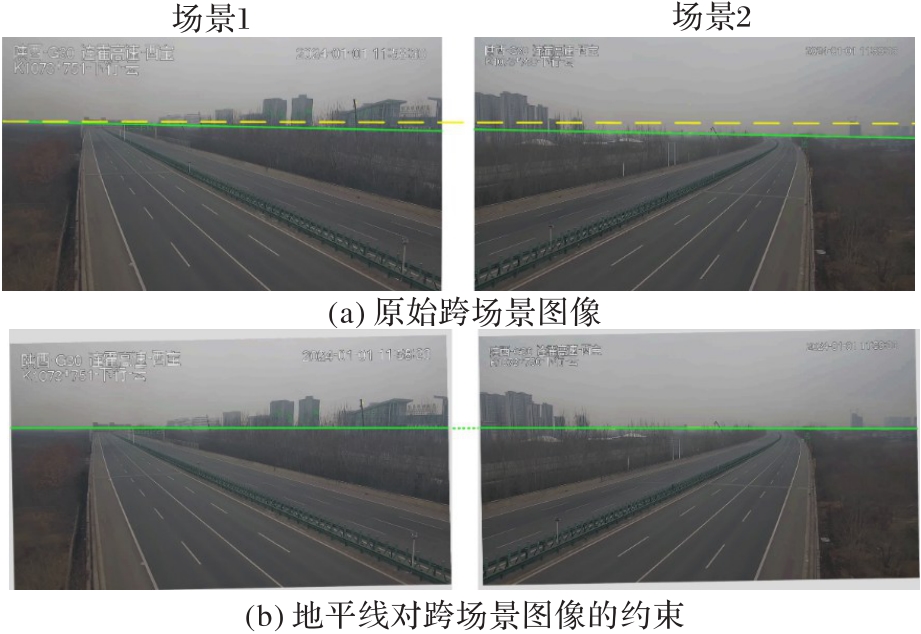
Fig. 6 Cross-scene image alignment under horizon geometric constraints
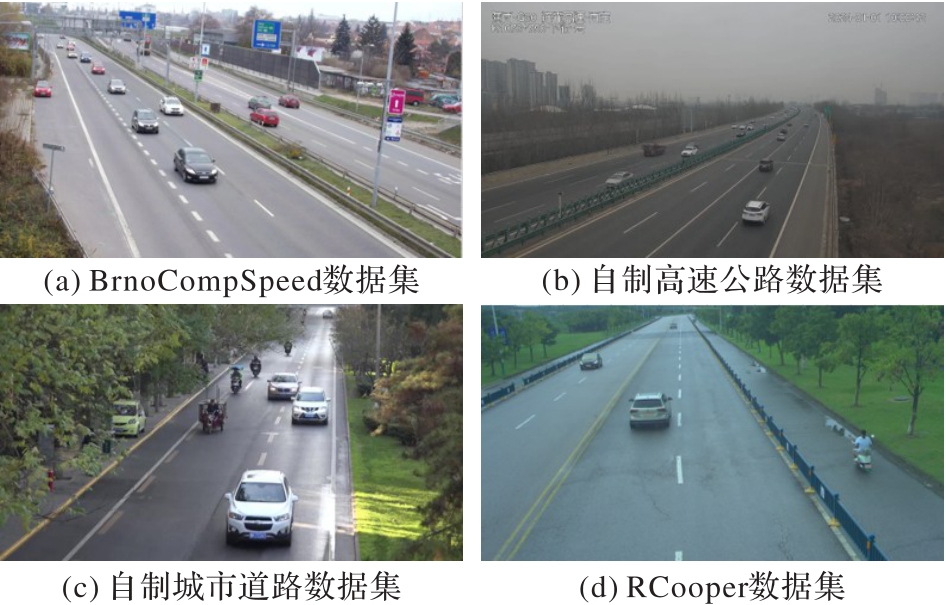
Fig. 7 Dataset image samples
| 实验名 | 感受野 注意力 卷积 | 动态 上采样 | 地平线 一致性 损失 | 像素 误差/% | 角度 误差/% | 推理 时延/ms |
|---|---|---|---|---|---|---|
| 基准实验 | × | × | × | 11.532 | 0.069 8 | 2.504 |
| 实验1 | √ | × | × | 7.317 | 0.045 0 | 1.917 |
| 实验2 | × | √ | × | 6.421 | 0.053 1 | 1.118 |
| 实验3 | × | × | √ | 5.951 | 0.009 9 | 1.504 |
| 实验4 | √ | √ | × | 5.539 | 0.013 5 | 1.320 |
| 实验5 | √ | × | √ | 6.705 | 0.036 5 | 1.831 |
| 实验6 | × | √ | √ | 5.930 | 0.025 7 | 1.244 |
| 实验7 | √ | √ | √ | 5.166 | 0.032 5 | 1.336 |
Tab. 1 Ablation experiment results of RoadHoriNet
| 实验名 | 感受野 注意力 卷积 | 动态 上采样 | 地平线 一致性 损失 | 像素 误差/% | 角度 误差/% | 推理 时延/ms |
|---|---|---|---|---|---|---|
| 基准实验 | × | × | × | 11.532 | 0.069 8 | 2.504 |
| 实验1 | √ | × | × | 7.317 | 0.045 0 | 1.917 |
| 实验2 | × | √ | × | 6.421 | 0.053 1 | 1.118 |
| 实验3 | × | × | √ | 5.951 | 0.009 9 | 1.504 |
| 实验4 | √ | √ | × | 5.539 | 0.013 5 | 1.320 |
| 实验5 | √ | × | √ | 6.705 | 0.036 5 | 1.831 |
| 实验6 | × | √ | √ | 5.930 | 0.025 7 | 1.244 |
| 实验7 | √ | √ | √ | 5.166 | 0.032 5 | 1.336 |
| 方法 | 像素误差/% | 角度误差/(°) |
|---|---|---|
| GHLD[ | 16.245 | 0.967 4 |
| BHLCM[28] | 18.876 | 0.100 2 |
| Kocur等[ | 10.374 | 0.057 8 |
| 王伟等[ | 9.981 | 0.051 9 |
| RoadHoriNet | 5.166 | 0.032 5 |
Tab. 2 Comparison of experimental errors of different methods
| 方法 | 像素误差/% | 角度误差/(°) |
|---|---|---|
| GHLD[ | 16.245 | 0.967 4 |
| BHLCM[28] | 18.876 | 0.100 2 |
| Kocur等[ | 10.374 | 0.057 8 |
| 王伟等[ | 9.981 | 0.051 9 |
| RoadHoriNet | 5.166 | 0.032 5 |
| 数据集 | 像素误差/% | 角度误差/(°) |
|---|---|---|
| BrnoCompSpeed | 5.166 | 0.032 5 |
| 自制高速公路数据集 | 2.443 | 0.011 2 |
| RCooper | 6.660 | 0.057 3 |
| 自制城市道路数据集 | 10.216 | 0.056 0 |
Tab. 3 Generalization performance of RoadHoriNet on different datasets
| 数据集 | 像素误差/% | 角度误差/(°) |
|---|---|---|
| BrnoCompSpeed | 5.166 | 0.032 5 |
| 自制高速公路数据集 | 2.443 | 0.011 2 |
| RCooper | 6.660 | 0.057 3 |
| 自制城市道路数据集 | 10.216 | 0.056 0 |
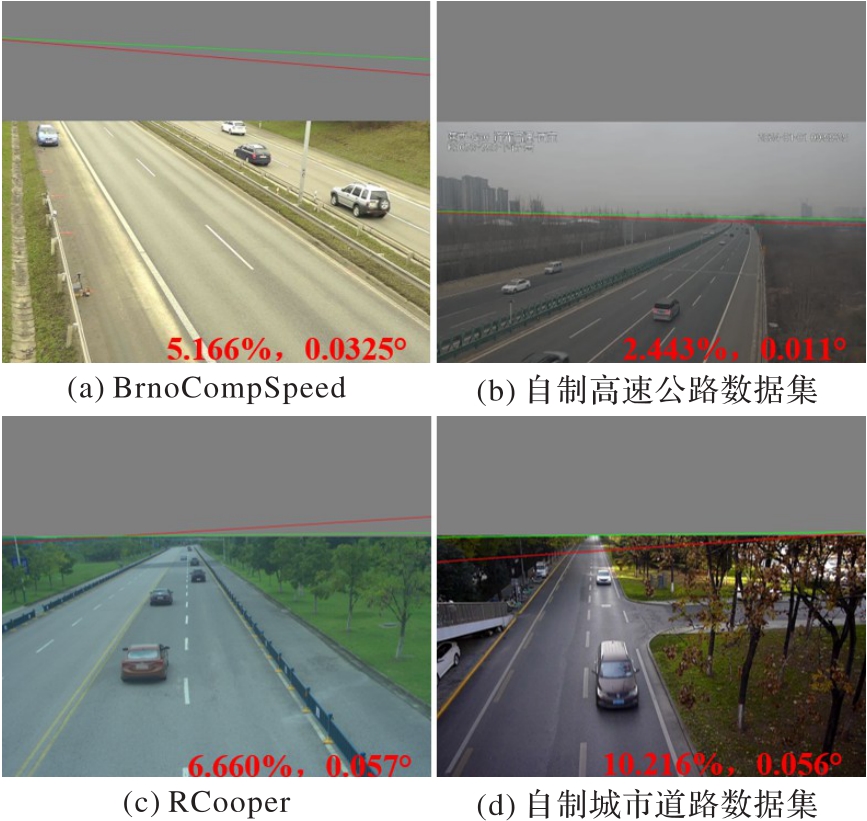
Fig. 8 Scene generalization verification results
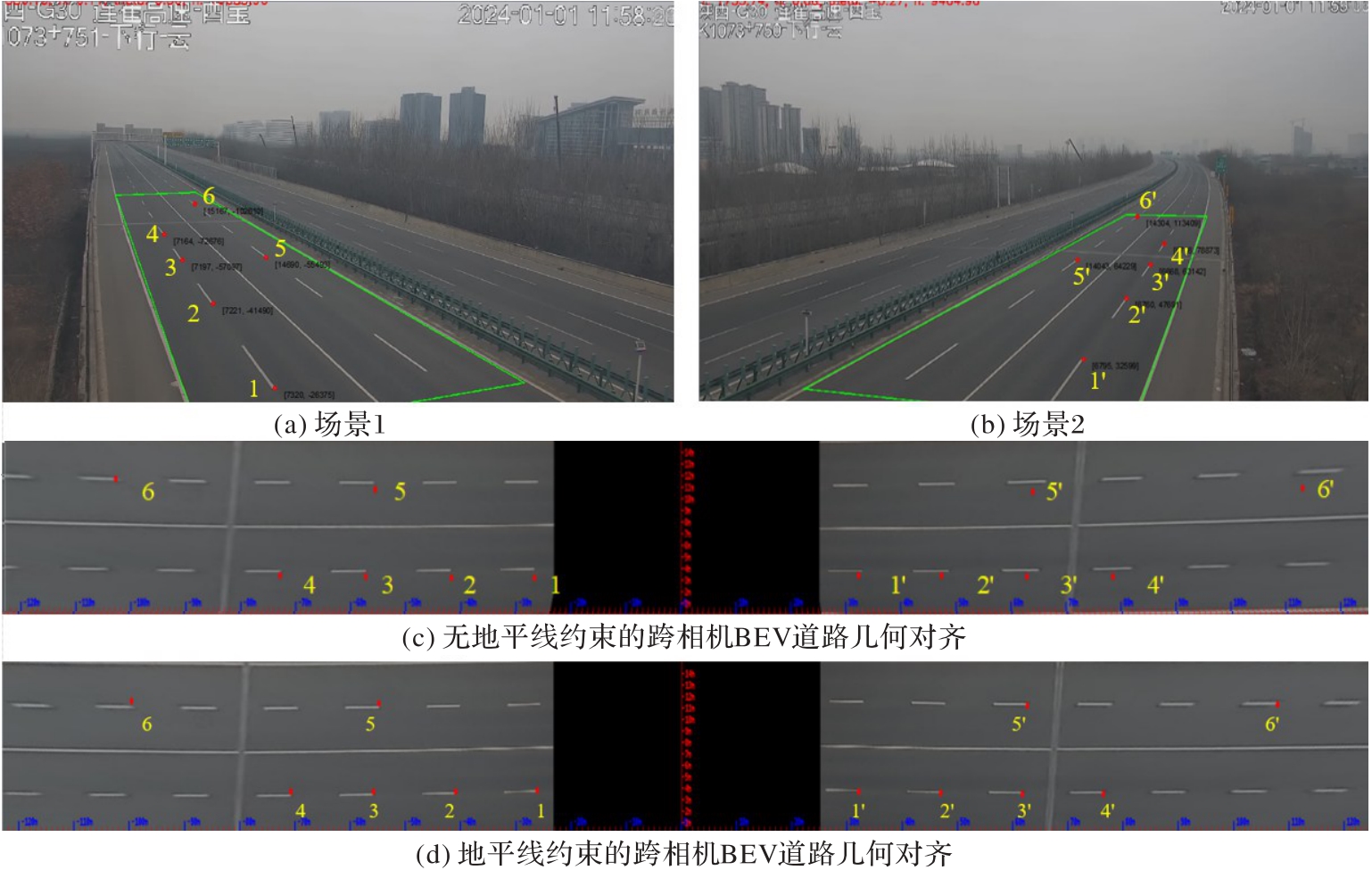
Fig. 9 Impact of horizon constraints on accuracy in cross-scene BEV road geometric alignment
场景 1 | 场景2 | 真实 距离/m | 无地平线约束 | 有地平线约束 | ||
|---|---|---|---|---|---|---|
| 计算得到的距离/m | Accalign/ % | 计算得到的距离/m | Accalign/ % | |||
| 点1 | 点1' | 60.000 | 59.422 | 99.037 | 59.932 | 99.887 |
| 点2 | 点2' | 90.000 | 88.815 | 98.683 | 89.612 | 99.569 |
| 点3 | 点3' | 120.000 | 116.647 | 97.206 | 119.300 | 99.417 |
| 点4 | 点4' | 150.000 | 144.433 | 96.289 | 149.039 | 99.359 |
| 点5 | 点5' | 120.000 | 116.248 | 96.873 | 118.955 | 99.129 |
| 点6 | 点6' | 210.000 | 220.770 | 94.871 | 208.668 | 99.367 |
Tab. 4 Relative alignment accuracy of cross-scene BEV road geometric alignment in highway scenarios
场景 1 | 场景2 | 真实 距离/m | 无地平线约束 | 有地平线约束 | ||
|---|---|---|---|---|---|---|
| 计算得到的距离/m | Accalign/ % | 计算得到的距离/m | Accalign/ % | |||
| 点1 | 点1' | 60.000 | 59.422 | 99.037 | 59.932 | 99.887 |
| 点2 | 点2' | 90.000 | 88.815 | 98.683 | 89.612 | 99.569 |
| 点3 | 点3' | 120.000 | 116.647 | 97.206 | 119.300 | 99.417 |
| 点4 | 点4' | 150.000 | 144.433 | 96.289 | 149.039 | 99.359 |
| 点5 | 点5' | 120.000 | 116.248 | 96.873 | 118.955 | 99.129 |
| 点6 | 点6' | 210.000 | 220.770 | 94.871 | 208.668 | 99.367 |
| [1] | 黄德启,黄海峰,黄德意,等. BEV感知学习在自动驾驶中的应用综述[J]. 计算机工程与应用, 2025, 61(6): 1-21. |
| HUANG D Q, HUANG H F, HUANG D Y, et al. Review of application of BEV perceptual learning in autonomous driving[J]. Computer Engineering and Applications, 2025, 61(6): 1-21. | |
| [2] | HARTLEY R, ZISSERMAN A. Multiple view geometry in computer vision[M]. 2nd ed. Cambridge: Cambridge University Press, 2004. |
| [3] | ZHAI M, WORKMAN S, JACOBS N. Detecting vanishing points using global image context in a non-Manhattan world[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 5657-5665. |
| [4] | FU J, LI F, ZHAO J. Real-time infrared horizon detection in maritime and land environments based on hyper-Laplace filter and convolutional neural network[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: No.5016513. |
| [5] | JEONG C, YANG H S, MOON K. A novel approach for detecting the horizon using a convolutional neural network and multi-scale edge detection[J]. Multidimensional Systems and Signal Processing, 2019, 30(3): 1187-1204. |
| [6] | XU Y, YAN H, MA Y, et al. Graph-based horizon line detection for UAV navigation[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14: 11683-11698. |
| [7] | LI F, ZHANG J, SUN W, et al. Sea-sky line detection using gray variation differences in the time domain for unmanned surface vehicles[J]. Signal, Image and Video Processing, 2021, 15(1): 139-146. |
| [8] | LI D, WU Z, ZUO Z, et al. Skyline detection method based on offset heatmap network[C]// Proceedings of the IEEE 4th International Conference on Electronic Technology, Communication and Information. Piscataway: IEEE, 2024: 1277-1280. |
| [9] | 叶继华,时淑霞,李汉曦,等. 一种结合深度学习和随机森林的地平线检测方法[J]. 系统仿真学报, 2018, 30(7): 2507-2514. |
| YE J H, SHI S X, LI H X, et al. A horizon detection method based on deep learning and random forest[J]. Journal of System Simulation, 2018, 30(7): 2507-2514. | |
| [10] | LIU Y B, ZENG M, MENG Q H. Unstructured road vanishing point detection using convolutional neural networks and heatmap regression[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: No.5002708. |
| [11] | ZHOU Y, QI H, HUANG J, et al. NeurVPS: neural vanishing point scanning via conic convolution[C]// Proceedings of the 33rd International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2019: 866-875. |
| [12] | 陈星,张文海,杨林,等. 结合立体视觉的非结构化道路消失点检测研究[J]. 西北工业大学学报, 2022, 40(6): 1431-1439. |
| CHEN X, ZHANG W H, YANG L, et al. Research on vanishing point detection of unstructured road scene combined with stereo vision[J]. Journal of Northwestern Polytechnical University, 2022, 40(6): 1431-1439. | |
| [13] | LIU S, ZHOU Y, ZHAO Y. VaPiD: a rapid vanishing point detector via learned optimizers[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 12839-12848. |
| [14] | KOCUR V, FTÁČNIK M. Traffic camera calibration via vehicle vanishing point detection[C]// Proceedings of the 2021 International Conference on Artificial Neural Networks, LNCS 12895. Cham: Springer, 2021: 628-639. |
| [15] | 王伟,赵春辉,唐心瑶,等. 自适应地平线约束下的车辆三维检测[J]. 计算机应用, 2024, 44(3): 909-915. |
| WANG W, ZHAO C H, TANG X Y, et al. 3D vehicle detection with adaptive horizon line constraints[J]. Journal of Computer Applications, 2024, 44(3): 909-915. | |
| [16] | LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection[C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017: 2999-3007. |
| [17] | ZHANG X, LIU C, YANG D, et al. RFAConv: innovating spatial attention and standard convolutional operation[EB/OL]. [2025-04-10].. |
| [18] | LIU W, LU H, FU H, et al. Learning to upsample by learning to sample[C]// Proceedings of the 2023 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2023: 6004-6014. |
| [19] | SOCHOR J, ŠPAŇHEL J, HEROUT A. BoxCars: improving fine-grained recognition of vehicles using 3-D bounding boxes in traffic surveillance[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(1): 97-108. |
| [20] | DUBSKÁ M, HEROUT A. Real projective plane mapping for detection of orthogonal vanishing points[C]// Proceedings of the 2013 British Machine Vision Conference. Durham: BMVA Press, 2013: No.90. |
| [21] | KHANAM R, HUSSAIN M. YOLOv11: an overview of the key architectural enhancements [EB/OL]. [2025-06-16]. . |
| [22] | CARION N, MASSA F, SYNNAEVE G, et al. End-to-end object detection with Transformers[C]// Proceedings of the 2020 European Conference on Computer Vision, LNCS 12346. Cham: Springer, 2020: 213-229. |
| [23] | YANG L, TANG T, LI J, et al. BEVHeight++: toward robust visual centric 3D object detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2025, 47(6): 5094-5111. |
| 王伟,张朝阳,唐心瑶,等. 道路场景下相机自动标定及优化算法[J]. 计算机辅助设计与图形学学报, 2019, 31(11): 1955-1962. | |
| WANG W, ZHANG C Y, TANG X Y, et al. Automatic self-calibration and optimization algorithm of traffic camera in road scene[J]. Journal of Computer-Aided Design and Computer Graphics, 2019, 31(11): 1955-1962. | |
| [24] | 王伟,唐心瑶,张朝阳,等. 跨相机交通场景下的车辆空间定位方法[J]. 计算机辅助设计与图形学学报, 2021, 33(6): 873-882. |
| WANG W, TANG X Y, ZHANG C Y, et al. Spatial positioning method of vehicle in cross-camera traffic scene[J]. Journal of Computer-Aided Design and Computer Graphics, 2021, 33(6): 873-882. | |
| [25] | SOCHOR J, JURÁNEK R, ŠPAŇHEL J, et al. Comprehensive data set for automatic single camera visual speed measurement[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(5): 1633-1643. |
| [26] | HAO R, FAN S, DAI Y, et al. RCooper: a real-world large-scale dataset for roadside cooperative perception[C]// Proceedings of the 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2024: 22347-22357. |
| [27] | FU J, ZHAO J, LI F, et al. Bisection window and homogeneity principle-based local contrast measure for infrared sea-sky line detection[J]. IEEE Geoscience and Remote Sensing Letters, 2024, 21: No.7000105. |
| [1] | Wei WANG, Chunhui ZHAO, Xinyao TANG, Liugang XI. 3D vehicle detection with adaptive horizon line constraints [J]. Journal of Computer Applications, 2024, 44(3): 909-915. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||