


Journal of Computer Applications ›› 2024, Vol. 44 ›› Issue (3): 909-915.DOI: 10.11772/j.issn.1001-9081.2023040416
Special Issue: 多媒体计算与计算机仿真
• Multimedia computing and computer simulation • Previous Articles Next Articles
Wei WANG, Chunhui ZHAO( ), Xinyao TANG, Liugang XI
), Xinyao TANG, Liugang XI
Received:2023-04-13
Revised:2023-06-30
Accepted:2023-07-05
Online:2023-12-04
Published:2024-03-10
Contact:
Chunhui ZHAO
About author:WANG Wei, born in 1984,Ph. D., lecturer. His research interests include computer vision, 3D reconstruction.Supported by:
王伟, 赵春辉(), 唐心瑶, 席刘钢
通讯作者:
赵春辉
作者简介:王伟(1984—),男,江苏徐州人,讲师,博士,主要研究方向:计算机视觉、三维重建基金资助:CLC Number:
Wei WANG, Chunhui ZHAO, Xinyao TANG, Liugang XI. 3D vehicle detection with adaptive horizon line constraints[J]. Journal of Computer Applications, 2024, 44(3): 909-915.
王伟, 赵春辉, 唐心瑶, 席刘钢. 自适应地平线约束下的车辆三维检测[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 909-915.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2023040416

Fig. 1 Flow of 3D vehicle detection based on horizon line constraint
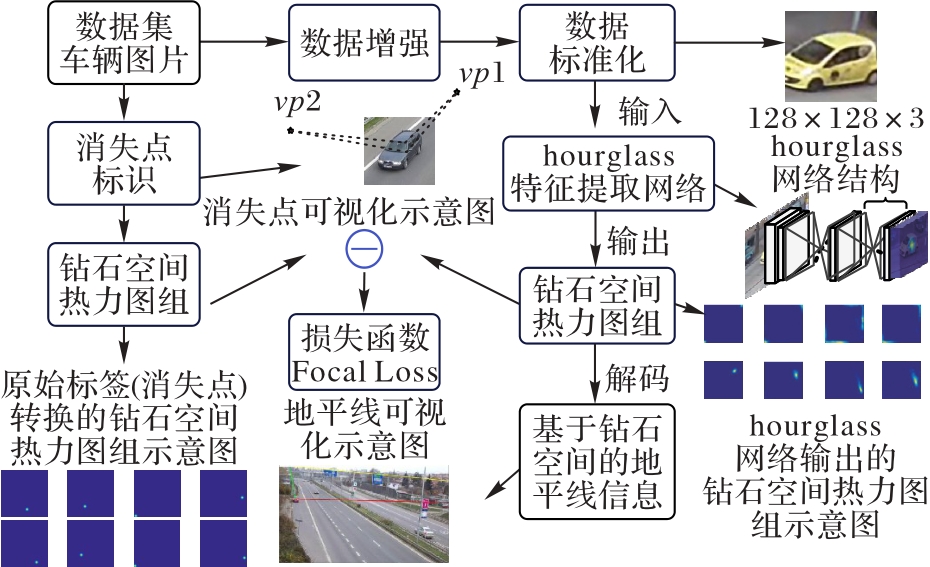
Fig. 2 Training flow of adaptive horizon line detection network
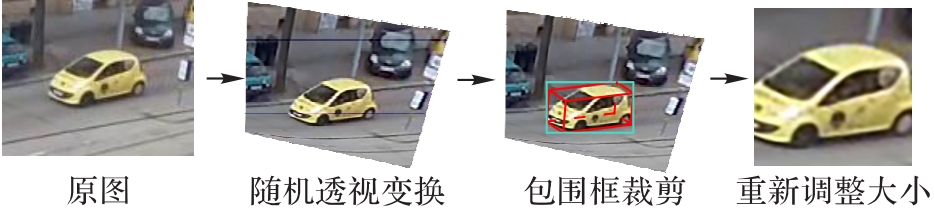
Fig. 3 Image pre-processing flow

Fig. 4 Traffic scene calibration
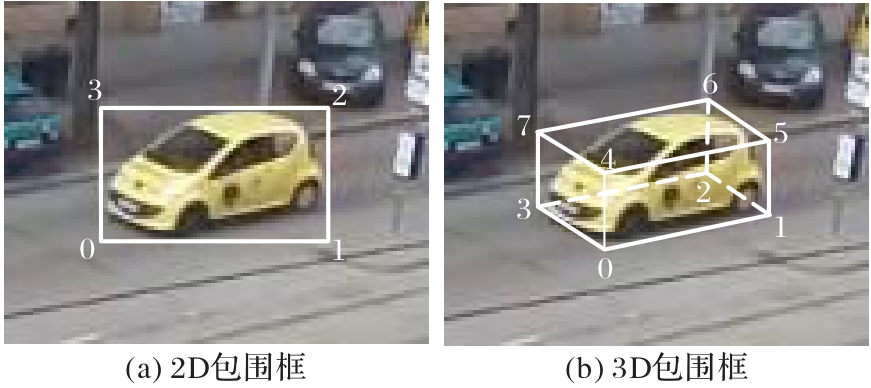
Fig. 5 Vehicle bounding boxes
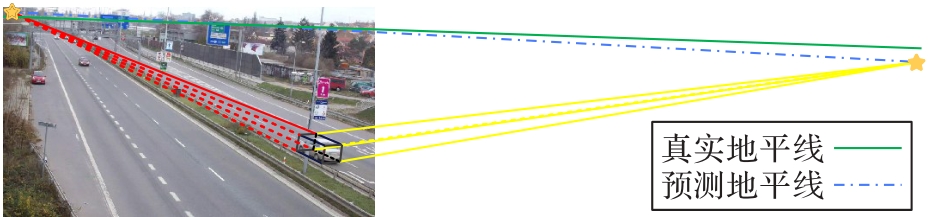
Fig. 6 Horizon line constraint

Fig. 7 Partial vehicle images in BoxCars116K dataset

Fig. 8 Partial view images in BrnoCompSpeed dataset
| 实验 | 数据增强 | 尺度变换模块 | Focal Loss | 误差% |
|---|---|---|---|---|
| 基准实验 | × | × | × | 27.102 |
| 实验1 | √ | × | × | 25.991 |
| 实验2 | × | √ | × | 22.284 |
| 实验3 | × | × | √ | 21.505 |
| 实验4 | √ | √ | √ | 20.770 |
Tab. 1 Ablation experiments results
| 实验 | 数据增强 | 尺度变换模块 | Focal Loss | 误差% |
|---|---|---|---|---|
| 基准实验 | × | × | × | 27.102 |
| 实验1 | √ | × | × | 25.991 |
| 实验2 | × | √ | × | 22.284 |
| 实验3 | × | × | √ | 21.505 |
| 实验4 | √ | √ | √ | 20.770 |
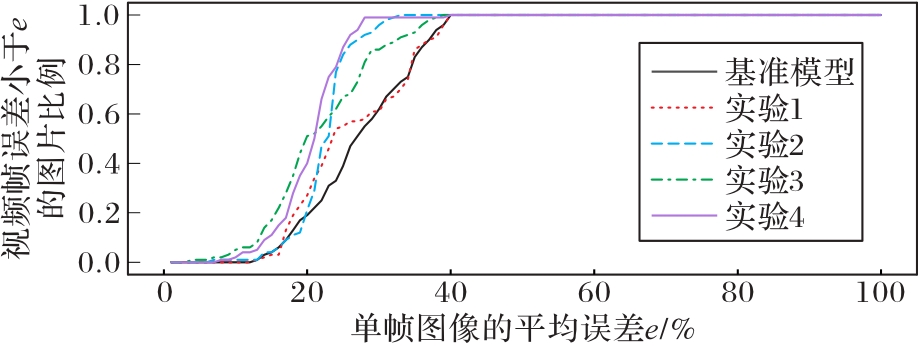
Fig. 9 AUC line chart of cumulative error in ablation experiments
| 算法 | AUC/% | 算法 | AUC/% |
|---|---|---|---|
| 文献[ | 77.500 | 本文算法 | 79.230 |
| 文献[ | 74.550 |
Tab. 2 Performance comparison of different horizon lines detection algorithms
| 算法 | AUC/% | 算法 | AUC/% |
|---|---|---|---|
| 文献[ | 77.500 | 本文算法 | 79.230 |
| 文献[ | 74.550 |

Fig. 10 Example of 3D vehicle detection
| 视角 | 长度误差/mm | 宽度误差/mm | 高度误差/mm | 精度/% |
|---|---|---|---|---|
| 平均值 | 204.719 | 131.258 | 169.313 | 92.201 |
| 左视角 | 162.392 | 125.189 | 158.641 | 94.106 |
| 中视角 | 260.774 | 118.560 | 149.292 | 90.845 |
| 右视角 | 190.990 | 149.995 | 200.005 | 91.652 |
Tab. 3 Recognition error and accuracy of multi-view 3D vehicle information
| 视角 | 长度误差/mm | 宽度误差/mm | 高度误差/mm | 精度/% |
|---|---|---|---|---|
| 平均值 | 204.719 | 131.258 | 169.313 | 92.201 |
| 左视角 | 162.392 | 125.189 | 158.641 | 94.106 |
| 中视角 | 260.774 | 118.560 | 149.292 | 90.845 |
| 右视角 | 190.990 | 149.995 | 200.005 | 91.652 |
| 算法 | 传感器 | 几何约束 | 精度/% | 帧率/(frame·s-1) |
|---|---|---|---|---|
| 文献[ | 单目相机 | 无 | 89.05 | 33.7 |
| 文献[ | 单目相机 | 对角线、消失点 | 90.00 | 44.6 |
| 文献[ | 单目相机 | 俯视2D框 | 92.16 | 36.4 |
| 文献[ | 单目相机 | 车辆2D、3D框 | 90.72 | 43.0 |
| 本文算法 | 单目相机 | 对角线、地平线 | 92.20 | 45.7 |
Tab. 4 Comparison of 3D vehicle detection algorithms
| 算法 | 传感器 | 几何约束 | 精度/% | 帧率/(frame·s-1) |
|---|---|---|---|---|
| 文献[ | 单目相机 | 无 | 89.05 | 33.7 |
| 文献[ | 单目相机 | 对角线、消失点 | 90.00 | 44.6 |
| 文献[ | 单目相机 | 俯视2D框 | 92.16 | 36.4 |
| 文献[ | 单目相机 | 车辆2D、3D框 | 90.72 | 43.0 |
| 本文算法 | 单目相机 | 对角线、地平线 | 92.20 | 45.7 |
| 1 | CHEN X, KUN K, ZHANG Z, et al. Monocular 3D object detection for autonomous driving [C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 2147-2156. 10.1109/cvpr.2016.236 |
| 2 | 张毅, 姚丹亚, 李力, 等. 智能车路协同系统关键技术与应用[J]. 交通运输系统工程与信息,2021,21(5): 40-51. 10.16097/j.cnki.1009-6744.2021.05.005 |
| ZHANG Y, YAO D Y, LI L, et al. Technologies and applications for intelligent vehicle-infrastructure cooperation systems [J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21(5): 40-51. 10.16097/j.cnki.1009-6744.2021.05.005 | |
| 3 | CHABOT F, CHAOUCH M, RABARISOA J, et al. Deep MANTA: A coarse-to-fine many-task network for joint 2D and 3D vehicle analysis from monocular image [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 2040-2049. 10.1109/cvpr.2017.198 |
| 4 | 毛河. 基于机器视觉的辅助驾驶系统中预警系统设计[D].成都: 电子科技大学, 2014:8-13. |
| MAO H. Anti-collision warning system in advanced driver assistance system based on machine vision[D]. Chengdu: University of Electronic Science and Technology of China, 2014:8-13. | |
| 5 | 顾德英, 张松, 孟范伟. 基于单目视觉的车辆3D空间检测方法[J]. 东北大学学报(自然科学版), 2022,43(3):328-334. |
| GU D Y, ZHANG S, MENG F W. Vehicle 3D space detection method based on monocular vision [J]. Journal of Northeastern University (Natural Science), 2022, 43(3):328-334. | |
| 6 | ZHANG Z, TAN T, HUANG K, et al. Three-dimensional deformable-model-based localization and recognition of road vehicles[J]. IEEE Transactions on Image Processing, 2012, 21(1):1-13. 10.1109/tip.2011.2160954 |
| 7 | PROKAJ J, MEDIONI G. 3-D model based vehicle recognition[C]// Proceeding of the 2009 Workshop on Applications of Computer Vision. Piscataway: IEEE, 2009: 1-7. 10.1109/wacv.2009.5403032 |
| 8 | 唐心瑶, 宋焕生, 王伟,等. 单目交通场景下基于自标定的车辆三维信息识别算法[J]. 计算机辅助设计与图形学学报, 2020, 32(8):1305-1314. 10.3724/sp.j.1089.2020.18041 |
| TANG X Y, SONG H S, WANG W, et al. 3D vehicle information recognition algorithm of monocular camera based on self-calibration in traffic scene [J]. Journal of Computer-Aided Design & Computer Graphics, 2020, 32(8):1305-1314. 10.3724/sp.j.1089.2020.18041 | |
| 9 | CHEN Y, LIU F, PEI K. Monocular vehicle 3D bounding box estimation using homograhy and geometry in traffic scene [C]// Proceedings of 2022 IEEE International Conference on Acoustics, Speech and Signal Processing. Piscataway: IEEE, 2022: 1995-1999. 10.1109/icassp43922.2022.9747512 |
| 10 | SOCHOR J, JURÁNEK R, HEROUT A. Traffic surveillance camera calibration by 3D model bounding box alignment for accurate vehicle speed measurement [J]. Computer Vision and Image Understanding, 2017, 161: 87-98. 10.1016/j.cviu.2017.05.015 |
| 11 | JEONG C, YANG H S, MOON K D. A novel approach for detecting the horizon using a convolutional neural network and multi-scale edge detection [J]. Multidimensional Systems and Signal Processing, 2019, 30(3): 1187-1204. 10.1007/s11045-018-0602-4 |
| 12 | AHMAD T, BEBIS G, NICOLESCU M, et al. Horizon line detection using supervised learning and edge cues [J]. Computer Vision and Image Understanding, 2020, 191:102879. 10.1016/j.cviu.2019.102879 |
| 13 | XU Y, YAN H, MA Y, et al. Graph-based horizon line detection for UAV navigation [J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14: 11683-11698. 10.1109/jstars.2021.3126586 |
| 14 | 叶继华, 时淑霞, 李汉曦, 等. 一种结合深度学习和随机森林的地平线检测方法[J]. 系统仿真学报,2018,30(7): 2507-2514. 10.16182/j.issn1004731x.joss.201807010 |
| YE J H, SHI S X, LI H X, et al. A horizon detection method based on deep learning and random forest [J]. Journal of System Simulation, 2018, 30(7): 2507-2514. 10.16182/j.issn1004731x.joss.201807010 | |
| 15 | DONG L, MA D, MA D, et al. Fast infrared horizon detection algorithm based on gradient directional filtration [J]. Journal of the Optical Society of America A, 2020, 37(11): 1795-1805. 10.1364/josaa.402620 |
| 16 | KLUGER F, ACKERMANN H, YANG M Y, et al. Temporally consistent horizon lines [C]// Proceedings of the 2020 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2020: 3161-3167. 10.1109/icra40945.2020.9197170 |
| 17 | 陈星, 张文海, 杨林,等. 结合立体视觉的非结构化道路消失点检测研究[J]. 西北工业大学学报, 2022, 40(6):1431-1439. 10.1051/jnwpu/20224061431 |
| CHEN X, ZHANG W H, YANG L,et al. Research on vanishing point detection of unstructured road scene combined with stereo vision [J]. Journal of Northwestern Polytechnical University, 2022, 40(6):1431-1439. 10.1051/jnwpu/20224061431 | |
| 18 | KOCUR V, FTÀČNIK M. Traffic camera calibration via vehicle vanishing point detection [C]// Proceedings of the 30th International Conference on Artificial Neural Networks. Cham: Springer, 2021: 628-639. 10.1007/978-3-030-86383-8_50 |
| 19 | NEWELL A, YANG K, DENG J. Stacked hourglass networks for human pose estimation [C]// Proceedings of the 14th European Conference on Computer Vision. Cham: Springer, 2016: 483-499. 10.1007/978-3-319-46484-8_29 |
| 20 | HARTLEY R, ZISSERMAN A. 计算机视觉中的多视图几何[M]. 韦穗,杨尚骏,章权兵,等译. 合肥:安徽大学出版社, 2002:63-66. |
| HARTLEY R, ZISSERMAN A. Multiview geometry in computer vision [M]. WEI S, YANG S J, ZHANG Q B, translated. Hefei: Anhui University Press, 2002:63-66. | |
| 21 | KANHERE N K, BIRCHFIELD S T. A taxonomy and analysis of camera calibration methods for traffic monitoring applications [J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(2):441-452. 10.1109/tits.2010.2045500 |
| 22 | DUBSKÁ M, HEROUT A. Real projective plane mapping for detection of orthogonal vanishing points [C]// Proceedings of the 2013 British Machine Vision Conference. Bristol: British Machine Vision Association, 2013: 1-10. 10.5244/c.27.90 |
| 23 | LIN T-Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection [C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE. 2017: 2999-3007. 10.1109/iccv.2017.324 |
| 24 | SOCHOR J, ŠPAŇHEL J, HEROUT A. BoxCars: Improving fine-grained recognition of vehicles using 3-D bounding boxes in traffic surveillance [J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(1): 97-108. 10.1109/tits.2018.2799228 |
| 25 | SOCHOR J, JURÁNEK R, ŠPAŇHEL J, et al. BrnoCompSpeed: Review of traffic camera calibration and comprehensive dataset for monocular speed measurement [EB/OL]. [2023-06-20]. . 10.1109/tits.2018.2825609 |
| 26 | HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition [C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 770-778. 10.1109/cvpr.2016.90 |
| [1] | Yexin PAN, Zhe YANG. Optimization model for small object detection based on multi-level feature bidirectional fusion [J]. Journal of Computer Applications, 2024, 44(9): 2871-2877. |
| [2] | Yingjun ZHANG, Niuniu LI, Binhong XIE, Rui ZHANG, Wangdong LU. Semi-supervised object detection framework guided by curriculum learning [J]. Journal of Computer Applications, 2024, 44(8): 2326-2333. |
| [3] | Yeheng LI, Guangsheng LUO, Qianmin SU. Logo detection algorithm based on improved YOLOv5 [J]. Journal of Computer Applications, 2024, 44(8): 2580-2587. |
| [4] | Song XU, Wenbo ZHANG, Yifan WANG. Lightweight video salient object detection network based on spatiotemporal information [J]. Journal of Computer Applications, 2024, 44(7): 2192-2199. |
| [5] | Xun SUN, Ruifeng FENG, Yanru CHEN. Monocular 3D object detection method integrating depth and instance segmentation [J]. Journal of Computer Applications, 2024, 44(7): 2208-2215. |
| [6] | Yue LIU, Fang LIU, Aoyun WU, Qiuyue CHAI, Tianxiao WANG. 3D object detection network based on self-attention mechanism and graph convolution [J]. Journal of Computer Applications, 2024, 44(6): 1972-1977. |
| [7] | Yaping DENG, Yingjiang LI. Review of YOLO algorithm and its applications to object detection in autonomous driving scenes [J]. Journal of Computer Applications, 2024, 44(6): 1949-1958. |
| [8] | Huantong GENG, Zhenyu LIU, Jun JIANG, Zichen FAN, Jiaxing LI. Embedded road crack detection algorithm based on improved YOLOv8 [J]. Journal of Computer Applications, 2024, 44(5): 1613-1618. |
| [9] | Hongtian LI, Xinhao SHI, Weiguo PAN, Cheng XU, Bingxin XU, Jiazheng YUAN. Few-shot object detection via fusing multi-scale and attention mechanism [J]. Journal of Computer Applications, 2024, 44(5): 1437-1444. |
| [10] | Xiaogang SONG, Dongdong ZHANG, Pengfei ZHANG, Li LIANG, Xinhong HEI. Real-time object detection algorithm for complex construction environments [J]. Journal of Computer Applications, 2024, 44(5): 1605-1612. |
| [11] | Yuqiu LI, Liping HOU, Jian XUE, Ke LYU, Yong WANG. Remote sensing image recommendation method based on content interpretation [J]. Journal of Computer Applications, 2024, 44(3): 722-731. |
| [12] | Xinye LI, Yening HOU, Yinghui KONG, Zhiqi YAN. Few-shot object detection combining feature fusion and enhanced attention [J]. Journal of Computer Applications, 2024, 44(3): 745-751. |
| [13] | Keyi FU, Gaocai WANG, Man WU. Few-shot object detection method based on improved region proposal network and feature aggregation [J]. Journal of Computer Applications, 2024, 44(12): 3790-3797. |
| [14] | Jiachen YU, Ye YANG. Irregular object grasping by soft robotic arm based on clipped proximal policy optimization algorithm [J]. Journal of Computer Applications, 2024, 44(11): 3629-3638. |
| [15] | Tao LIU, Shihong JU, Yimeng GAO. Small object detection algorithm from drone perspective based on improved YOLOv8n [J]. Journal of Computer Applications, 2024, 44(11): 3603-3609. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||