《计算机应用》唯一官方网站 ›› 0, Vol. ›› Issue (): 176-179.DOI: 10.11772/j.issn.1001-9081.2024040522
孙晓旭1,2, 曾俊宝1( ), 徐高朋1
), 徐高朋1
Xiaoxu SUN1,2, Junbao ZENG1(), Gaopeng XU1
摘要:
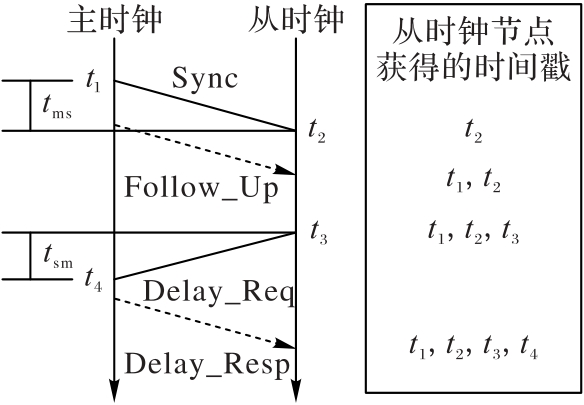
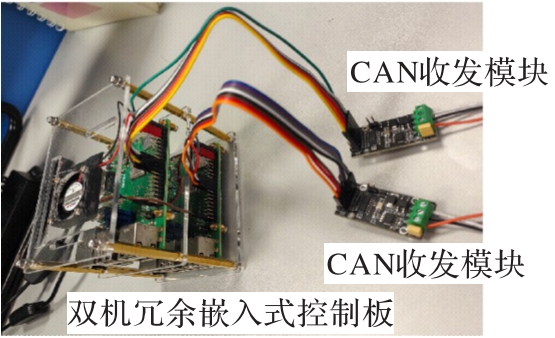
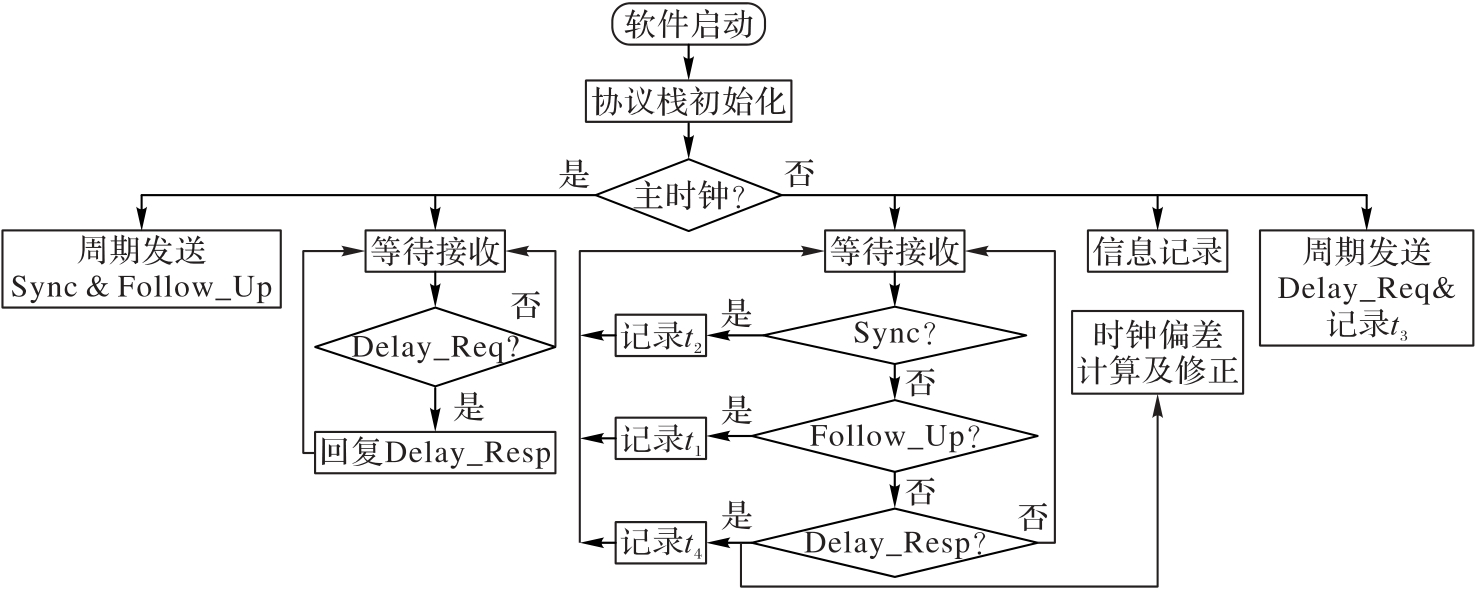
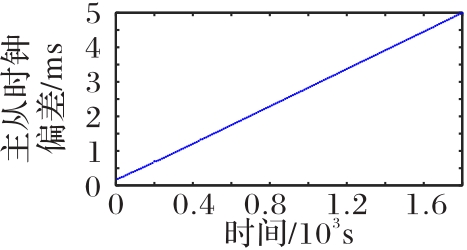
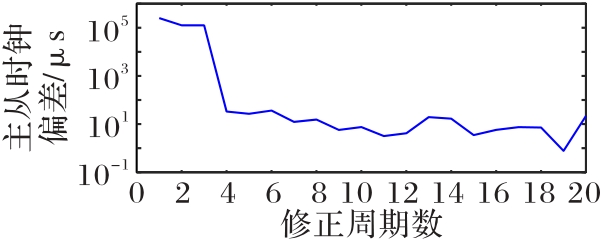
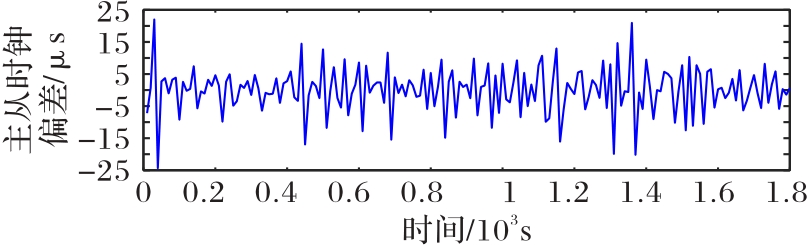
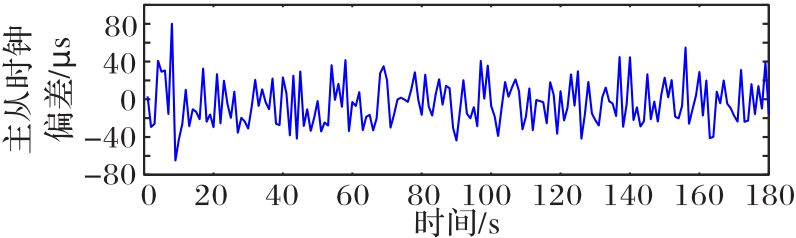
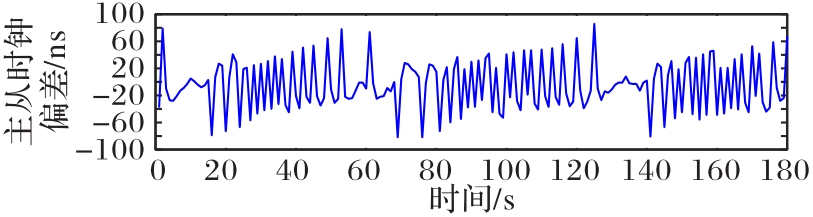
针对基于控制器局域网(CAN)的自主水下航行器(AUV)双机冗余控制系统既需要达到一定程度的时钟同步,又缺乏可实施IEEE 1588(网络测量和控制系统的精密时钟同步协议标准)的以太网接口的问题,提出一种基于CAN和IEEE 1588原理的精密时钟同步方法。首先,基于IEEE 1588原理编写基于CAN的双机时钟同步软件的核心代码;其次,根据CAN标准帧的数据长度编码交互的关键数据并压缩至8字节;最后,测试基于CAN的双机时钟同步软件的同步性能,并与基于以太网的双机时钟同步软件的同步性能进行对比分析。实际硬件平台上的测试结果表明,使用所提方法的双机冗余控制系统的时钟同步精度可达到并维持在25 μs内,满足本双机冗余控制系统1 ms的同步精度要求。可见,所提方法可有效保障双机冗余控制系统的时钟同步精度。
中图分类号: