


Journal of Computer Applications ›› 2022, Vol. 42 ›› Issue (10): 3268-3274.DOI: 10.11772/j.issn.1001-9081.2021081522
• Frontier and comprehensive applications • Previous Articles Next Articles
Zhenghong QIN, Ran LIU, Yufeng XIAO, Kaixiang CHEN, Zhongyuan DENG, Tianrui DENG
Received:2021-08-26
Revised:2021-11-29
Accepted:2021-12-03
Online:2022-01-07
Published:2022-10-10
Contact:
Ran LIU
About author:QIN Zhenghong, ,born in 1996, M. S. candidate. Her research interests include WiFi localization, Simultaneous Localization And Mapping (SLAM).Supported by:秦正泓, 刘冉, 肖宇峰, 陈凯翔, 邓忠元, 邓天睿
通讯作者:
刘冉
作者简介:第一联系人:秦正泓(1996—),女,四川广安人,硕士研究生,主要研究方向:WiFi定位、同步定位与地图构建(SLAM)基金资助:CLC Number:
Zhenghong QIN, Ran LIU, Yufeng XIAO, Kaixiang CHEN, Zhongyuan DENG, Tianrui DENG. Simultaneous localization and mapping for mobile robots based on WiFi fingerprint sequence matching[J]. Journal of Computer Applications, 2022, 42(10): 3268-3274.
秦正泓, 刘冉, 肖宇峰, 陈凯翔, 邓忠元, 邓天睿. 基于WiFi指纹序列匹配的机器人同步定位与地图构建[J]. 《计算机应用》唯一官方网站, 2022, 42(10): 3268-3274.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2021081522
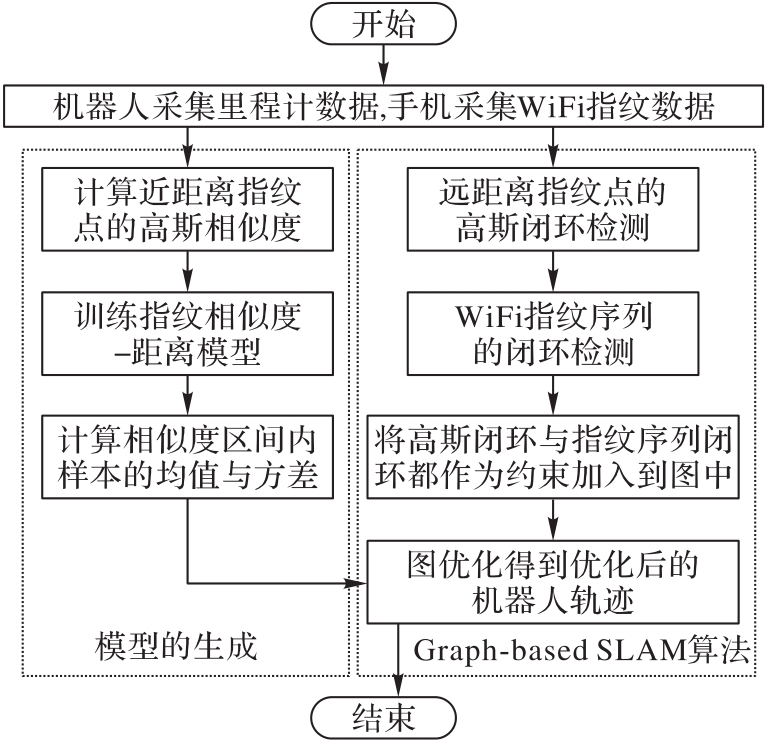
Fig.1 Flow of the proposed algorithm
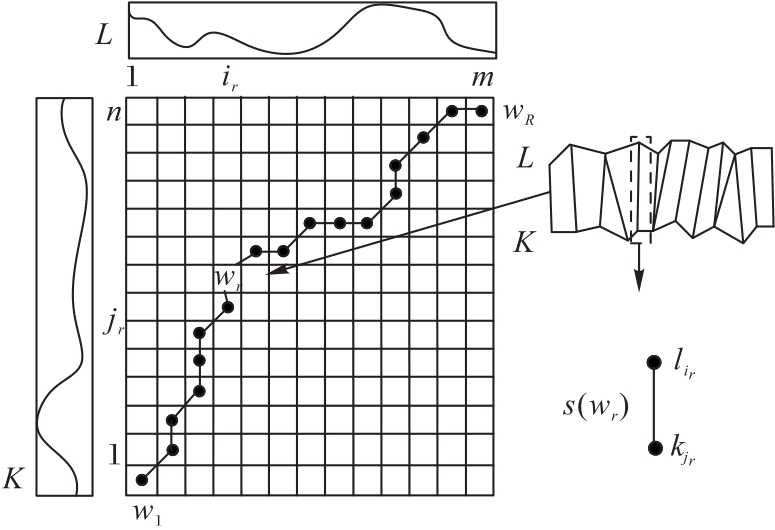
Fig. 2 Schematic diagram of path in similarity matrix
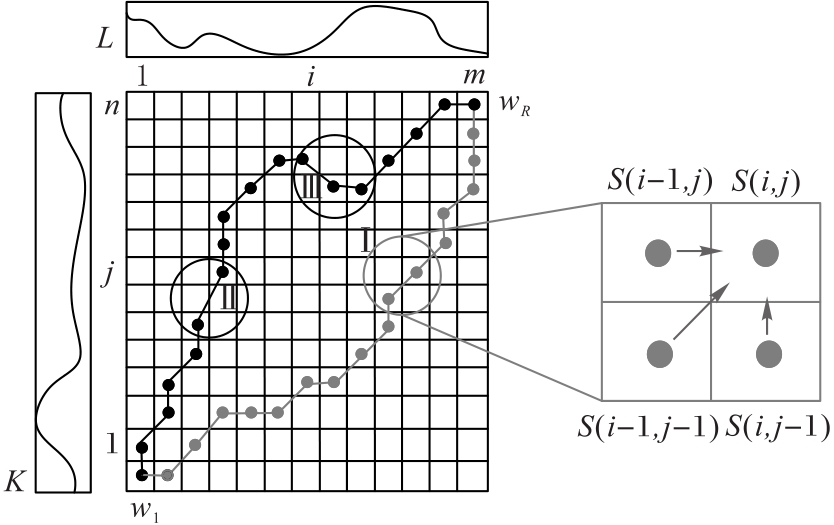
Fig. 3 Schematic diagram of constraints on effective paths in similarity matrix
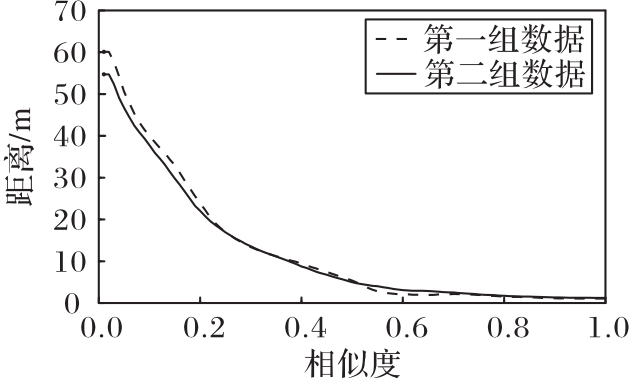
Fig. 4 Fingerprint similarity distance model
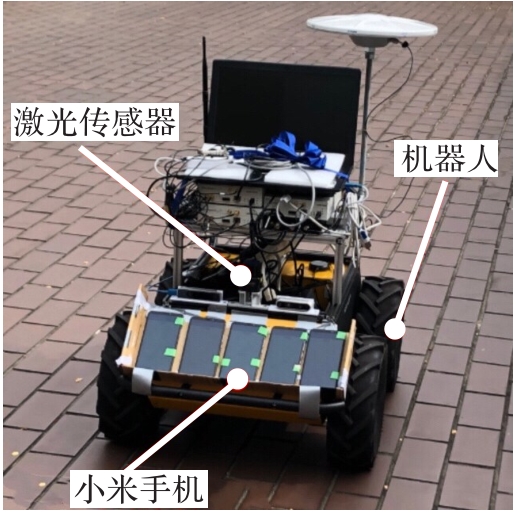
Fig. 5 Data acquisition platform
| 组别 | 高斯/m | 指纹序列/m | 高斯+指纹序列(加干扰)/m | ||||
|---|---|---|---|---|---|---|---|
| 无干扰 | 删除部分AP | 高斯噪声3 | 高斯噪声5 | ||||
| 第一组 | 0.05 | 4.17 | 3.85 | 3.83 | 4.01 | 4.05 | 3.78 |
| 0.10 | 4.01 | 3.23 | 3.19 | 3.35 | 3.39 | 3.41 | |
| 0.20 | 4.43 | 3.43 | 3.09 | 3.48 | 3.02 | 3.11 | |
| 0.30 | 4.21 | 3.47 | 3.41 | 3.50 | 3.33 | 3.36 | |
| 0.40 | 4.40 | 3.56 | 3.45 | 3.97 | 3.58 | 3.88 | |
| 0.50 | 4.45 | 4.12 | 3.98 | 4.33 | 4.17 | 4.20 | |
| 0.60 | 5.75 | 5.82 | 5.68 | 5.69 | 4.99 | 5.55 | |
| 0.70 | 18.99 | 18.99 | 18.99 | 18.99 | 18.99 | 18.99 | |
| 第二组 | 0.05 | 14.78 | 13.85 | 12.13 | 13.66 | 12.56 | 13.18 |
| 0.10 | 9.15 | 5.63 | 5.27 | 5.88 | 5.14 | 6.23 | |
| 0.20 | 3.91 | 2.67 | 2.36 | 2.82 | 2.41 | 2.61 | |
| 0.30 | 3.88 | 2.83 | 2.65 | 2.74 | 2.57 | 2.78 | |
| 0.40 | 4.19 | 3.88 | 3.02 | 3.51 | 3.32 | 3.65 | |
| 0.50 | 4.44 | 4.95 | 4.13 | 4.37 | 3.99 | 4.27 | |
| 0.60 | 8.89 | 8.10 | 7.79 | 7.98 | 7.86 | 7.83 | |
| 0.70 | 10.12 | 10.12 | 10.12 | 10.12 | 10.12 | 10.12 | |
Tab. 1 Influence of different loop closure detection methods and vs on SLAM algorithm accuracy
| 组别 | 高斯/m | 指纹序列/m | 高斯+指纹序列(加干扰)/m | ||||
|---|---|---|---|---|---|---|---|
| 无干扰 | 删除部分AP | 高斯噪声3 | 高斯噪声5 | ||||
| 第一组 | 0.05 | 4.17 | 3.85 | 3.83 | 4.01 | 4.05 | 3.78 |
| 0.10 | 4.01 | 3.23 | 3.19 | 3.35 | 3.39 | 3.41 | |
| 0.20 | 4.43 | 3.43 | 3.09 | 3.48 | 3.02 | 3.11 | |
| 0.30 | 4.21 | 3.47 | 3.41 | 3.50 | 3.33 | 3.36 | |
| 0.40 | 4.40 | 3.56 | 3.45 | 3.97 | 3.58 | 3.88 | |
| 0.50 | 4.45 | 4.12 | 3.98 | 4.33 | 4.17 | 4.20 | |
| 0.60 | 5.75 | 5.82 | 5.68 | 5.69 | 4.99 | 5.55 | |
| 0.70 | 18.99 | 18.99 | 18.99 | 18.99 | 18.99 | 18.99 | |
| 第二组 | 0.05 | 14.78 | 13.85 | 12.13 | 13.66 | 12.56 | 13.18 |
| 0.10 | 9.15 | 5.63 | 5.27 | 5.88 | 5.14 | 6.23 | |
| 0.20 | 3.91 | 2.67 | 2.36 | 2.82 | 2.41 | 2.61 | |
| 0.30 | 3.88 | 2.83 | 2.65 | 2.74 | 2.57 | 2.78 | |
| 0.40 | 4.19 | 3.88 | 3.02 | 3.51 | 3.32 | 3.65 | |
| 0.50 | 4.44 | 4.95 | 4.13 | 4.37 | 3.99 | 4.27 | |
| 0.60 | 8.89 | 8.10 | 7.79 | 7.98 | 7.86 | 7.83 | |
| 0.70 | 10.12 | 10.12 | 10.12 | 10.12 | 10.12 | 10.12 | |
| 第一组 | 第二组 | |||
|---|---|---|---|---|
| 高斯 | 指纹序列 | 高斯 | 指纹序列 | |
| 0.05 | 233 518 | 196 523 | 279 074 | 218 567 |
| 0.10 | 124 120 | 95 621 | 123 973 | 85 472 |
| 0.20 | 46 252 | 31 258 | 24 355 | 18 865 |
| 0.30 | 24 453 | 19 843 | 9 366 | 7 546 |
| 0.40 | 9 300 | 4 562 | 3 045 | 1 488 |
| 0.50 | 1 770 | 612 | 619 | 257 |
| 0.60 | 35 | 0 | 32 | 0 |
| 0.70 | 0 | 0 | 0 | 0 |
| 0.80 | 0 | 0 | 0 | 0 |
| 0.90 | 0 | 0 | 0 | 0 |
Tab. 2 Influence of loop closure detection methods and vs on loop closure number
| 第一组 | 第二组 | |||
|---|---|---|---|---|
| 高斯 | 指纹序列 | 高斯 | 指纹序列 | |
| 0.05 | 233 518 | 196 523 | 279 074 | 218 567 |
| 0.10 | 124 120 | 95 621 | 123 973 | 85 472 |
| 0.20 | 46 252 | 31 258 | 24 355 | 18 865 |
| 0.30 | 24 453 | 19 843 | 9 366 | 7 546 |
| 0.40 | 9 300 | 4 562 | 3 045 | 1 488 |
| 0.50 | 1 770 | 612 | 619 | 257 |
| 0.60 | 35 | 0 | 32 | 0 |
| 0.70 | 0 | 0 | 0 | 0 |
| 0.80 | 0 | 0 | 0 | 0 |
| 0.90 | 0 | 0 | 0 | 0 |
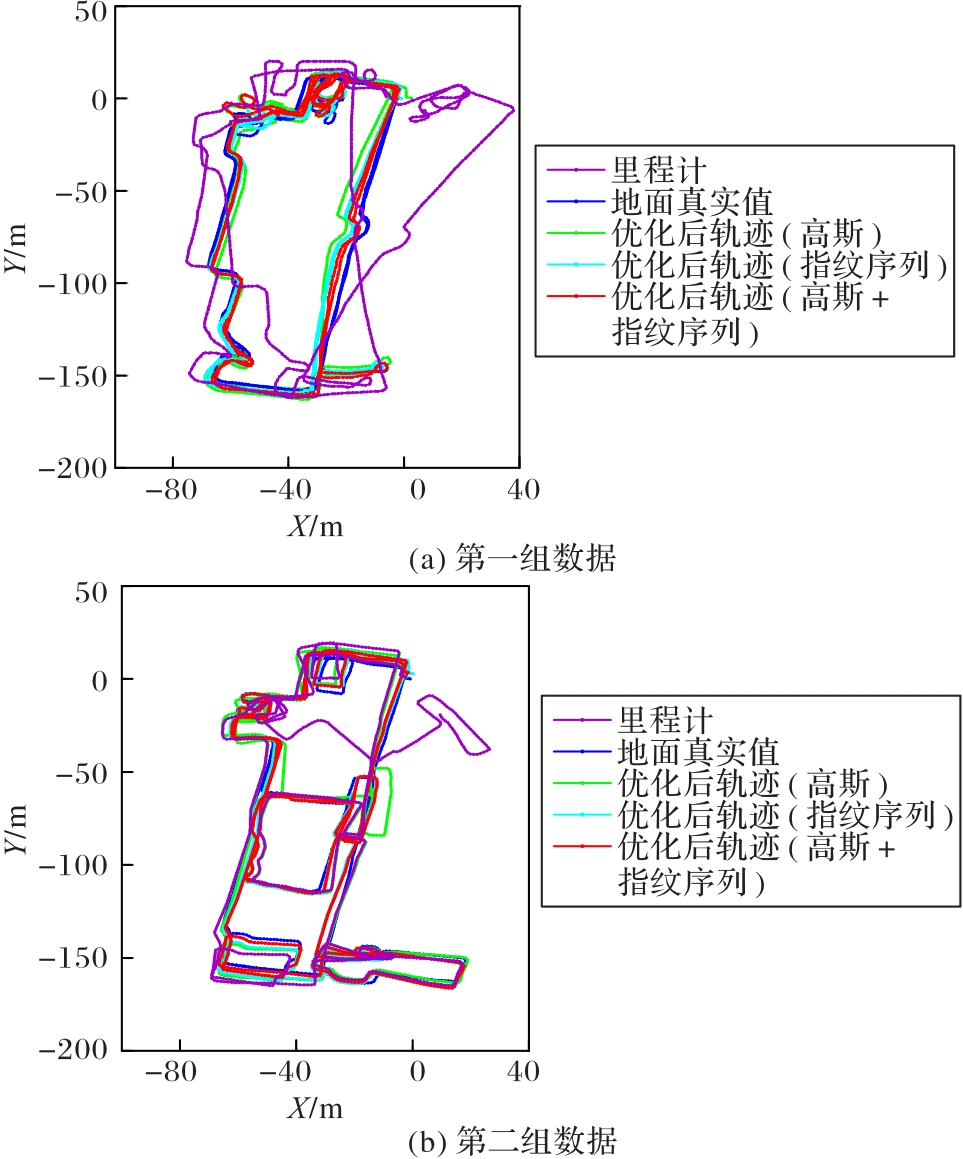
Fig. 6 Trajectory comparison
| (n,m) | 第一组( | 第二组( | ||||||
|---|---|---|---|---|---|---|---|---|
| 无干扰 | 删除部分AP | 高斯噪声3 | 高斯噪声5 | 无干扰 | 删除部分AP | 高斯噪声3 | 高斯噪声5 | |
| (10,15) | 3.49 | 3.64 | 3.55 | 3.59 | 2.77 | 2.96 | 3.12 | 3.25 |
| (20,25) | 3.09 | 3.35 | 3.02 | 3.11 | 2.36 | 2.74 | 2.41 | 2.61 |
| (30,35) | 3.42 | 3.29 | 3.49 | 3.58 | 2.86 | 2.81 | 2.39 | 2.58 |
| (40,45) | 3.66 | 3.93 | 3.85 | 3.90 | 3.00 | 3.37 | 2.81 | 3.24 |
| (50,55) | 3.54 | 4.01 | 3.97 | 4.12 | 3.15 | 3.50 | 3.37 | 3.59 |
Tab. 3 Influence of length of fingerprint sequence on SLAM algorithm accuracy under Gauss+fingerprint sequence method
| (n,m) | 第一组( | 第二组( | ||||||
|---|---|---|---|---|---|---|---|---|
| 无干扰 | 删除部分AP | 高斯噪声3 | 高斯噪声5 | 无干扰 | 删除部分AP | 高斯噪声3 | 高斯噪声5 | |
| (10,15) | 3.49 | 3.64 | 3.55 | 3.59 | 2.77 | 2.96 | 3.12 | 3.25 |
| (20,25) | 3.09 | 3.35 | 3.02 | 3.11 | 2.36 | 2.74 | 2.41 | 2.61 |
| (30,35) | 3.42 | 3.29 | 3.49 | 3.58 | 2.86 | 2.81 | 2.39 | 2.58 |
| (40,45) | 3.66 | 3.93 | 3.85 | 3.90 | 3.00 | 3.37 | 2.81 | 3.24 |
| (50,55) | 3.54 | 4.01 | 3.97 | 4.12 | 3.15 | 3.50 | 3.37 | 3.59 |
| 1 | CADENA C, CARLONE L, CARRILLO H, et al. Past, present, and future of simultaneous localization and mapping: toward the robust-perception age[J]. IEEE Transactions on Robotics, 2016, 32(6):1309-1332. 10.1109/tro.2016.2624754 |
| 2 | HASHIM H A, ELTOUKHY A E E. Landmark and IMU data fusion: systematic convergence geometric nonlinear observer for SLAM and velocity bias[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(4):3292-3301. 10.1109/tits.2020.3035550 |
| 3 | SMITH R C, CHEESMAN P. On the representation of spatial uncertainty[J]. The International Journal of Robotics Research, 1986, 5(4):56-68. 10.1177/027836498600500404 |
| 4 | VALLVÉ J, SOLÀ J, ANDRADE-CETTO J. Pose-graph SLAM sparsification using factor descent[J]. Robotics and Autonomous Systems, 2019, 119:108-118. 10.1016/j.robot.2019.06.004 |
| 5 | MENDES E, KOCH P, LACROIX S. ICP-based pose-graph SLAM[C]// Proceedings of the 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics. Piscataway: IEEE, 2016:195-200. 10.1109/ssrr.2016.7784298 |
| 6 | HARSÁNYI K, KISS A, SZIRÁNYI T, et al. MASAT: a fast and robust algorithm for pose-graph initialization[J]. Pattern Recognition Letters, 2020, 129:131-136. 10.1016/j.patrec.2019.11.010 |
| 7 | KÜMMERLE R, GRISETTI G, STRASDAT H, et al. g2o: a general framework for graph optimization[C]// Proceedings of the 2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2011:3607-3613. 10.1109/icra.2011.5979949 |
| 8 | FANG B F, MEI G F, YUAN X H, et al. Visual SLAM for robot navigation in healthcare facility[J]. Pattern Recognition, 2021, 113: No.107822. 10.1016/j.patcog.2021.107822 |
| 9 | 林国聪,薛斌强,王冬青. 基于图优化的SLAM后端优化算法研究[J]. 电子设计工程, 2020, 28(24):6-10, 16. 10.14022/j.issn1674-6236.2020.24.002 |
| LIN G C, XUE B Q, WANG D Q. Research on SLAM back-end optimization algorithm based on graph optimization[J]. Electronic Design Engineering, 2020, 28(24):6-10, 16. 10.14022/j.issn1674-6236.2020.24.002 | |
| 10 | RYU K, DANTANARAYANA L, FURUKAWA T, et al. Grid-based scan-to-map matching for accurate 2D map building: advanced robotics[J]. Advanced Robotics, 2016, 30(7):431-448. 10.1080/01691864.2015.1124025 |
| 11 | CHO H, KIM E K, KIM S. Indoor SLAM application using geometric and ICP matching methods based on line features[J]. Robotics and Autonomous Systems, 2018, 100:206-224. 10.1016/j.robot.2017.11.011 |
| 12 | CAMPOS C, ELVIRA R, RODRÍGUEZ J J G, et al. ORB-SLAM3: an accurate open-source library for visual, visual-inertial and multi-map SLAM[J]. IEEE Transactions on Robotics, 2021, 37(6):1874-1890. 10.1109/tro.2021.3075644 |
| 13 | HUANG S D, DISSANAYAKE G. Convergence and consistency analysis for extended Kalman filter based SLAM[J]. IEEE Transactions on Robotics, 2007, 23(5):1036-1049. 10.1109/tro.2007.903811 |
| 14 | DUNÍK J, STRAKA O. Rao-Blackwellised point-mass smoothers for a class of conditionally linear dynamic models[C]// Proceedings of the 22th International Conference on Information Fusion. Piscataway: IEEE, 2019:1-8. 10.23919/fusion43075.2019.9011246 |
| 15 | CHOI J W, SONG H K, LEE S H, et al. Real-time EKF SLAM system using confidence map of depth information[J]. International Journal of Applied Engineering Research, 2016, 11(2):1077-1081. |
| 16 | THRUN S, BURGARD W, FOX D. Probabilistic Robotics[M]. Cambridge: MIT Press, 2005:108-135. |
| 17 | KSCHISCHANG F R, FREY B J, LOELIGER H A. Factor graphs and the sum-product algorithm[J]. IEEE Transactions on Information Theory, 2001, 47(2):498-519. 10.1109/18.910572 |
| 18 | CARLEVARIS-BIANCO N, KAESS M, EUSTICE R M. Generic node removal for factor-graph SLAM[J]. IEEE Transactions on Robotics, 2014, 30(6):1371-1385. 10.1109/tro.2014.2347571 |
| 19 | VALLVÉ J, SOLÀ J, ANDRADE-CETTO J. Factor descent optimization for sparsification in graph SLAM[C]// Proceedings of the 2017 European Conference on Mobile Robots. Piscataway: IEEE, 2017:1-6. 10.1109/ecmr.2017.8098675 |
| 20 | GOLFARELLI M, MAIO D, RIZZI S. Elastic correction of dead-reckoning errors in map building[C]// Proceedings of the 1998 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 1998: 905-911. |
| 21 | FERRIS B, FOX D, LAWRENCE N. WiFi-SLAM using Gaussian process latent variable models[C]// Proceedings of the 20th International Joint Conference on Artificial Intelligence. San Francisco: Morgan Kaufmann Publishers Inc., 2007: 2480-2485. 10.1145/1273496.1273557 |
| 22 | HUANG J, MILLMAN D, QUIGLEY M, et al. Efficient, generalized indoor WiFi GraphSLAM[C]// Proceedings of the 2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2011: 1038-1043. 10.1109/icra.2011.5979643 |
| 23 | GU Y, ZHOU C F, WIESER A, et al. WiFi based trajectory alignment, calibration and crowdsourced site survey using smart phones and foot-mounted IMUs[C]// Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation. Piscataway: IEEE, 2017: 1-6. 10.1109/ipin.2017.8115929 |
| 24 | LIU R, MARAKKALAGE S H, PADMAL M, et al. Collaborative slam based on WiFi fingerprint similarity and motion information[J]. IEEE Internet of Things Journal, 2020, 7(3): 1826-1840. 10.1109/jiot.2019.2957293 |
| 25 | 秦国威,孙新柱,陈孟元. 基于WIFI指纹定位的仿生SLAM研究[J].智能系统学报, 2018, 13(3):407-413. 10.11992/tis.201705020 |
| QIN G W, SUN X Z, CHEN M Y. Bio-inspired SLAM fingerprint location based on WIFI[J]. CAAI Transactions on Intelligent Systems, 2018, 13(3):407-413. 10.11992/tis.201705020 |
| [1] | Zhihong XI, Jiaxu WEN. Indoor dynamic scene localization and mapping based on target detection [J]. Journal of Computer Applications, 2022, 42(9): 2853-2857. |
| [2] | LIN Junchao, WAN Yuan. Self-adaptive multi-measure unsupervised feature selection method with structured graph optimization [J]. Journal of Computer Applications, 2021, 41(5): 1282-1289. |
| [3] | REN Xiaokui, LIU Pengfei, TAO Zhiyong, LIU Ying, BAI Lichun. Indoor intrusion detection based on direction-of-arrival estimation algorithm for single snapshot [J]. Journal of Computer Applications, 2021, 41(4): 1153-1159. |
| [4] | Hao FU, Hegen XU, Zhiming ZHANG, Shaohua QI. Visual simultaneous localization and mapping based on semantic and optical flow constraints in dynamic scenes [J]. Journal of Computer Applications, 2021, 41(11): 3337-3344. |
| [5] | ZHENG Sicheng, KONG Linghua, YOU Tongfei, YI Dingrong. Semantic SLAM algorithm based on deep learning in dynamic environment [J]. Journal of Computer Applications, 2021, 41(10): 2945-2951. |
| [6] | WEI Wenle, JIN Guodong, TAN Lining, LU Libin, CHEN Danqi. Real-time SLAM algorithm with keyframes determined by inertial measurement unit [J]. Journal of Computer Applications, 2020, 40(4): 1157-1163. |
| [7] | ZHAO Hong, LIU Xiangdong, YANG Yongjuan. Indoor robot simultaneous localization and mapping based on RGB-D image [J]. Journal of Computer Applications, 2020, 40(12): 3637-3643. |
| [8] | XI Zhihong, WANG Hongxu, HAN Shuangquan. Fast mismatch elimination algorithm and map-building based on ORB-SLAM2 system [J]. Journal of Computer Applications, 2020, 40(11): 3289-3294. |
| [9] | LIU Lishuang, WEI Zhongcheng, ZHANG Chunhua, WANG Wei, ZHAO Jijun. Lifetime estimation for human motion with WiFi channel state information [J]. Journal of Computer Applications, 2019, 39(7): 2056-2060. |
| [10] | HUANG Shuai, FU Guangyuan, WU Ming, YUE Min. Multi-mode filtering object tracking algorithm based on monocular suboptimal parallax under unknown environment [J]. Journal of Computer Applications, 2019, 39(3): 864-868. |
| [11] | XI Zhihong, HAN Shuangquan, WANG Hongxu. Simultaneous localization and semantic mapping of indoor dynamic scene based on semantic segmentation [J]. Journal of Computer Applications, 2019, 39(10): 2847-2851. |
| [12] | SHI Bai, ZHUANG Jie, PANG Hong. Non-cooperative indoor human motion detection based on channel state information [J]. Journal of Computer Applications, 2017, 37(7): 1843-1848. |
| [13] | HOU Rongbo, WEI Wu, HUANG Ting, DENG Chaofeng. Indoor robot localization and 3D dense mapping based on ORB-SLAM [J]. Journal of Computer Applications, 2017, 37(5): 1439-1444. |
| [14] | LIN Huican, LYU Qiang, WANG Guosheng, ZHANG Yang, LIANG Bing. 3D simultaneous localization and mapping for mobile robot based on VSLAM [J]. Journal of Computer Applications, 2017, 37(10): 2884-2887. |
| [15] | ZHOU Rui, LI Zhiqiang, LUO Lei. WiFi-pedestrian dead reckoning fused indoor positioning based on particle filtering [J]. Journal of Computer Applications, 2016, 36(5): 1188-1191. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||