


Journal of Computer Applications ›› 2024, Vol. 44 ›› Issue (1): 278-284.DOI: 10.11772/j.issn.1001-9081.2023010009
Special Issue: 多媒体计算与计算机仿真
• Multimedia computing and computer simulation • Previous Articles Next Articles
Jian LIU1,2, Chenchen YOU1, Jinming CAO1, Qiong ZENG1, Changhe TU1( )
)
Received:2023-01-06
Revised:2023-03-18
Accepted:2023-03-20
Online:2023-06-06
Published:2024-01-10
Contact:
Changhe TU
About author:LIU Jian, born in 1987, Ph. D., assistant research fellow. His research interests include computer graphics, robot.Supported by:
刘健1,2, 尤晨晨1, 曹金明1, 曾琼1, 屠长河1()
通讯作者:
屠长河
作者简介:刘健(1987—),男,山东潍坊人,助理研究员,博士,CCF会员,主要研究方向:计算机图形学、机器人;基金资助:CLC Number:
Jian LIU, Chenchen YOU, Jinming CAO, Qiong ZENG, Changhe TU. Construction and application of 3D dataset of human grasping objects[J]. Journal of Computer Applications, 2024, 44(1): 278-284.
刘健, 尤晨晨, 曹金明, 曾琼, 屠长河. 人手抓取物体的三维数据集的建立及应用[J]. 《计算机应用》唯一官方网站, 2024, 44(1): 278-284.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2023010009

Fig. 1 Objects to be grasped by hand
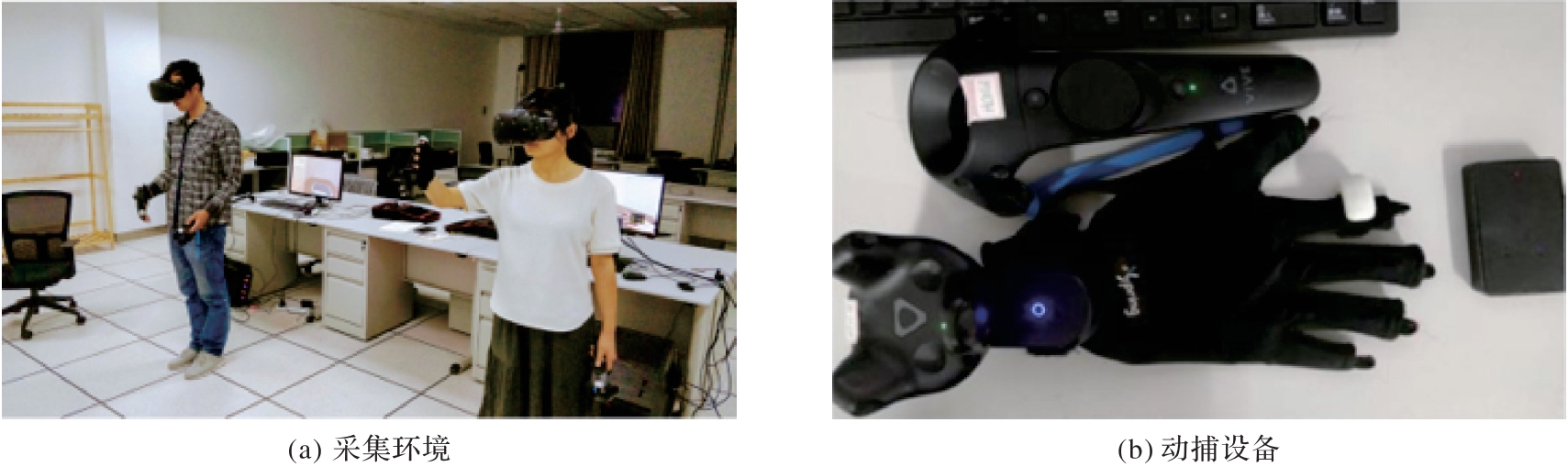
Fig. 2 Virtual platform for grasping
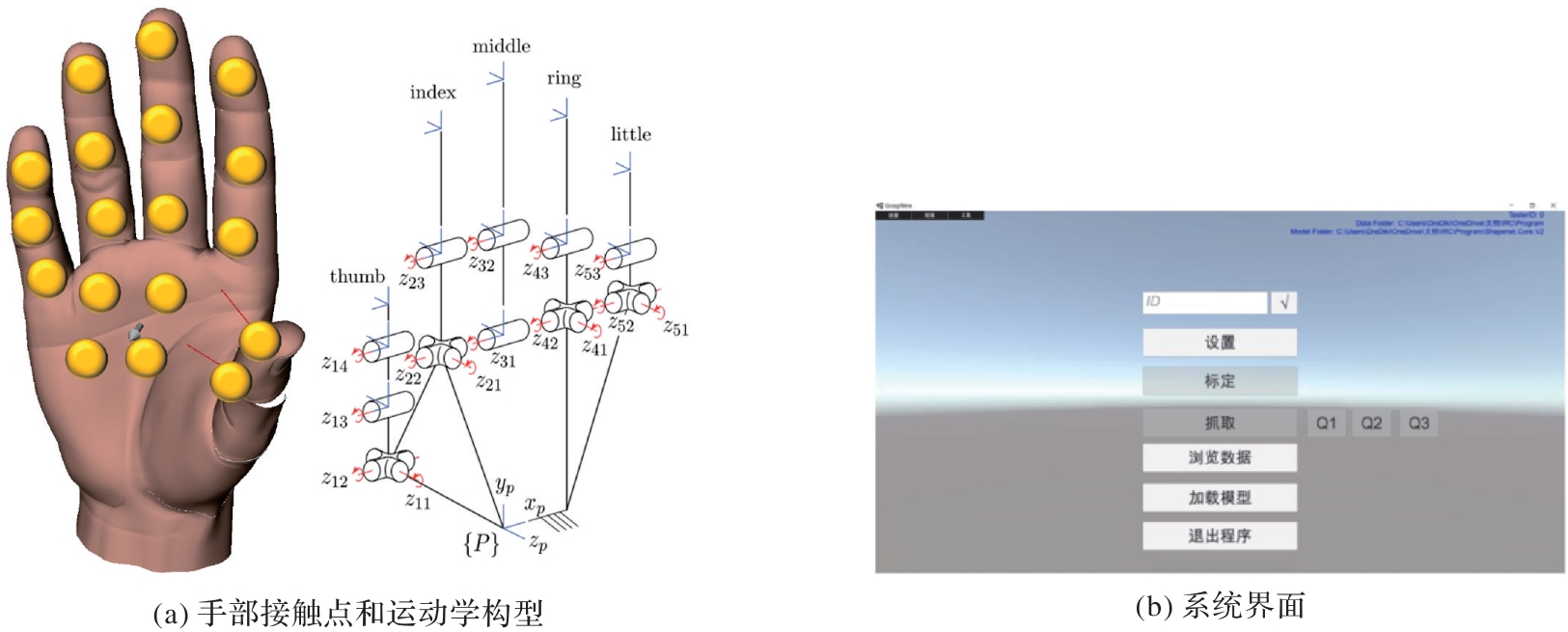
Fig. 3 Grasping data capture system built based on Unity

Fig. 4 Grasping with different heights and poses

Fig. 5 Results after grasping data processing
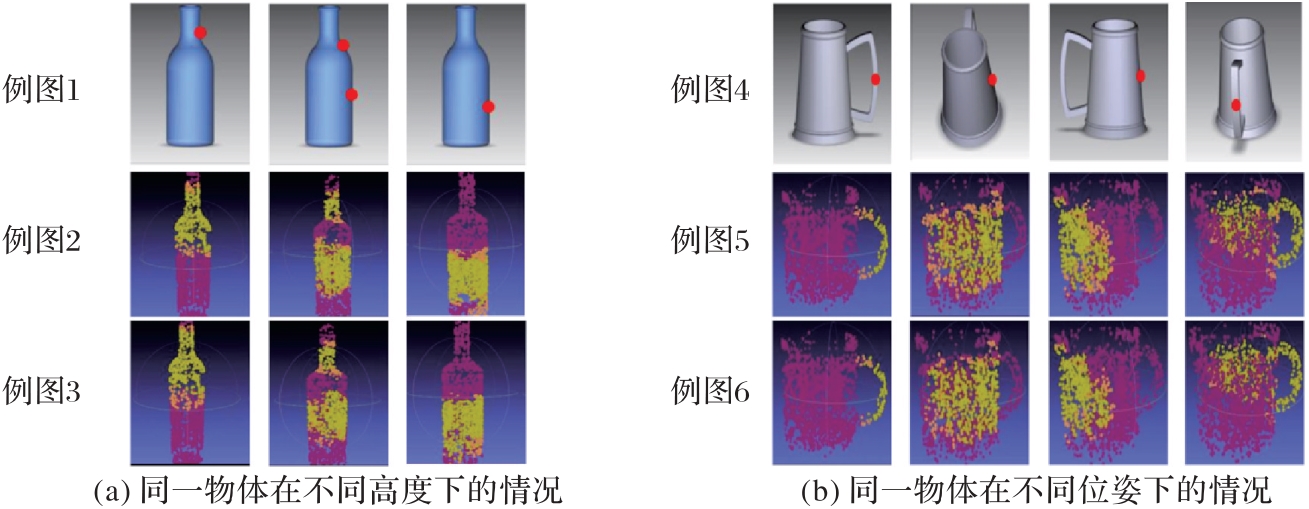
Fig. 6 Object grasping saliency analysis via deep neural network learning

Fig. 7 Human-like grasping computation based on simulated annealing algorithm
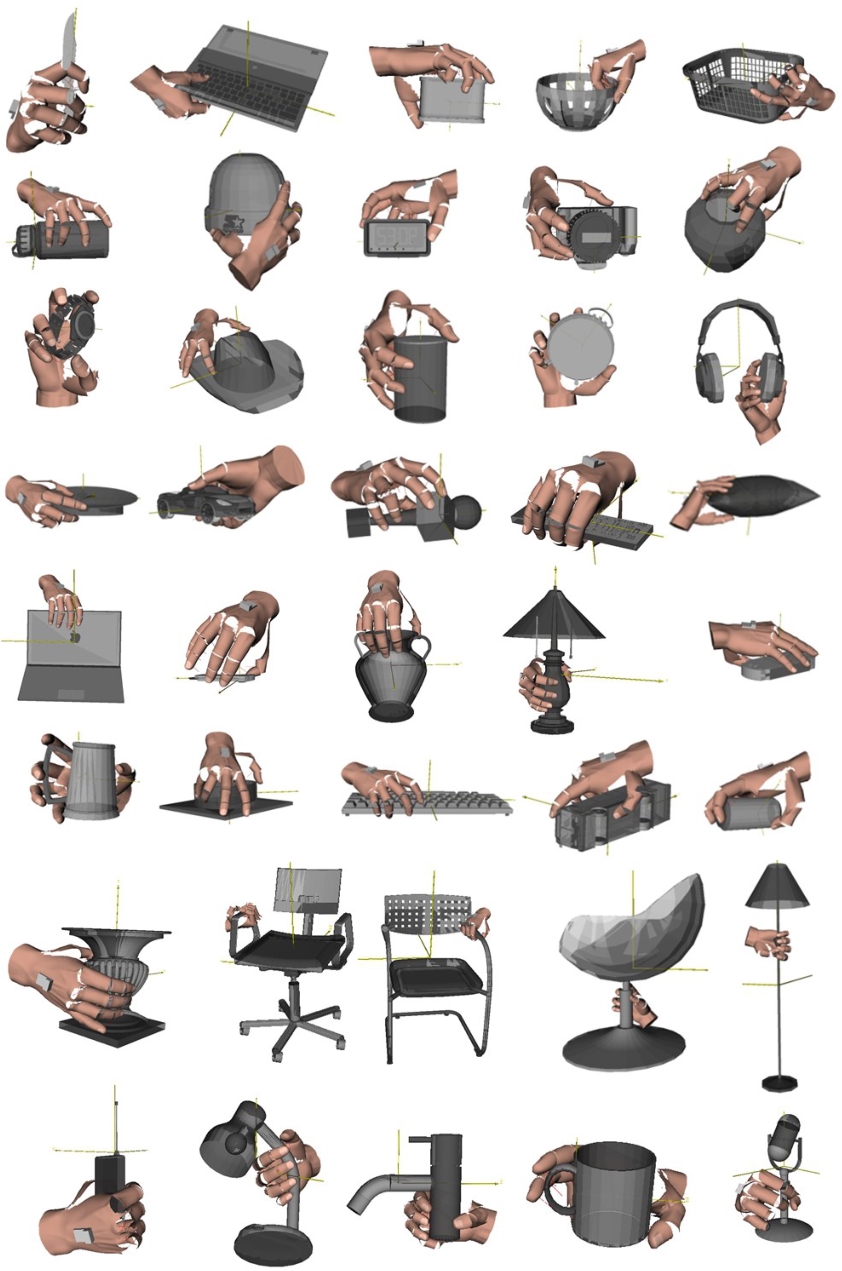
Fig. 8 Human-like calculation grasping results for various objects

Fig. 9 Various human-like candidate grasping results for same object
| 1 | TEGIN J, EKVALL S, KRAGIC D, et al. Demonstration-based learning and control for automatic grasping [J]. Intelligent Service Robotics, 2009, 2: 23-30. 10.1007/s11370-008-0026-3 |
| 2 | YUN L, SUN Y. Grasp planning based on strategy extracted from demonstration [C]// Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2014: 4458-4463. 10.1109/iros.2014.6943193 |
| 3 | BRAHMBHATT S, HAM C, KEMP C C, et al. ContactDB: Analyzing and predicting grasp contact via thermal imaging [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 8701-8711. 10.1109/cvpr.2019.00891 |
| 4 | HUANG D-A, MA M, MA W-C, et al. How do we use our hands? Discovering a diverse set of common grasps [C]// Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2015: 666-675. 10.1109/cvpr.2015.7298666 |
| 5 | BULLOCK I M, FEIX T, DOLLAR A M. The Yale human grasping dataset: Grasp, object and task data in household and machine shop environments [J]. The International Journal of Robotics Research, 2015, 34(3): 251-255. 10.1177/0278364914555720 |
| 6 | SAUDABAYEV A, RYSBEK Z, KHASSENOVA R, et al. Human grasping database for activities of daily living with depth, color and kinematic data streams [J]. Scientific Data, 2018, 5: 180101. 10.1038/sdata.2018.101 |
| 7 | HEUMER G, AMOR H B, WEBER M, et al. Grasp recognition with uncalibrated data gloves — a comparison of classification methods [C]// Proceedings of the 2007 IEEE Virtual Reality Conference. Piscataway: IEEE, 2007: 19-26. 10.1109/vr.2007.352459 |
| 8 | YUAN S, YE Q, STENGER B, et al. BigHand2.2M benchmark: Hand pose dataset and state of the art analysis [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 4866-4874. 10.1109/cvpr.2017.279 |
| 9 | GARCIA-HERNANDO G, YUAN S, BAEK S, et al. First-person hand action benchmark with RGB-D videos and 3D hand pose annotations [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 409-419. 10.1109/cvpr.2018.00050 |
| 10 | CHANGE A X, FUNKHOUSER T, GUIBAS L, et al. ShapeNet: An information-rich 3D model repository [EB/OL]. (2015-12-09) [2023-01-05]. . |
| 11 | CAI M, KITANI K M, SATO Y. An ego-vision system for hand grasp analysis [J]. IEEE Transactions on Human-Machine Systems, 2017, 47(4): 524-535. 10.1109/thms.2017.2681423 |
| 12 | ABBASI B, NOOHI E, PARASTEGARI S, et al. Grasp taxonomy based on force distribution [C]// Proceedings of the 2016 25th IEEE International Symposium on Robot and Human Interactive Communication. Piscataway: IEEE, 2016: 1098-1103. 10.1109/roman.2016.7745245 |
| 13 | BETTI S, ZANI G, GUERRA S, et al. Reach-to-grasp movements: A multimodal techniques study [J]. Frontiers in Psychology, 2018, 9: 990. 10.3389/fpsyg.2018.00990 |
| 14 | PUHLMANN S, HEINEMANN F, BROCK O, et al. A compact representation of human single-object grasping [C]// Proceedings of the 2016 IEEE/RJS International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2016: 1954-1959. 10.1109/iros.2016.7759308 |
| 15 | HEINEMANN F, PUHIMANN S, EPPNER C, et al. A taxonomy of human grasping behavior suitable for transfer to robotic hands [C]// Proceedings of the 2015 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2015: 4286-4291. 10.1109/icra.2015.7139790 |
| 16 | KUMAR V, TODOROV E. MuJoCo HAPTIX: A virtual reality system for hand manipulation [C]// Proceedings of the 2015 IEEE-RAS 15th International Conference on Humanoid Robots. Piscataway: IEEE, 2015: 657-663. 10.1109/humanoids.2015.7363441 |
| 17 | AMOR H BEN, KROEMER O, HILLENBRAND U, et al. Generalization of human grasping for multi-fingered robot hands [C]// Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2012: 2043-2050. 10.1109/iros.2012.6386072 |
| 18 | ROMERO J, KJELLSTROM H, KRAGIC D. Modeling and evaluation of human-to-robot mapping of grasps [C]// Proceedings of the 2009 IEEE International Conference on Advanced Robotics. Piscataway: IEEE, 2009: 1-6. |
| 19 | HERZOG A, PASTOR P, KALAKRISHNAN M, et al. Template-based learning of grasp selection [C]// Proceedings of the 2012 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2012: 2379-2384. 10.1109/icra.2012.6225271 |
| 20 | YANG Y, FERMÜLLER C, LI Y, et al. Grasp type revisited: A modern perspective on a classical feature vision [C]// Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2015: 400-408. 10.1109/cvpr.2015.7298637 |
| 21 | NAKAMURA Y C, TRONIAK D M, RODRIGUEZ A, et al. The complexities of grasping in the wild [C]// Proceedings of the 2017 IEEE-RAS International Conference on Humanoid Robotics. Piscataway: IEEE, 2017: 233-240. 10.1109/humanoids.2017.8246880 |
| 22 | CUTKOSKY M R. On grasp choice, grasp models, and the design of hands for manufacturing tasks [J]. IEEE Transactions on Robotics and Automation, 1989, 5(3): 269-279. 10.1109/70.34763 |
| 23 | KAMAKURA N, MATSUO M, ISHII H, et al. Patterns of static prehension in normal hands [J]. The American Journal of Occupational Therapy, 1980, 34(7): 437-445. 10.5014/ajot.34.7.437 |
| 24 | TANG D, CHANG H J, TEJANI A, et al. Latent regression forest: Structured estimation of 3D articulated hand posture [C]// Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2014: 3786-3793. 10.1109/cvpr.2014.490 |
| 25 | BALASUBRAMANIAN R, XU L, BROOK P D, et al. Physical human interactive guidance: Identifying grasping principles from human-planned grasps [J]. IEEE Transactions on Robotics, 2012, 28(4): 899-910. 10.1109/tro.2012.2189498 |
| 26 | TOMPSON J, STEIN M, LeCUN Y, et al. Real-time continuous pose recovery of human hands using convolutional networks [J]. ACM Transactions on Graphics, 2014, 33(5): No. 169. 10.1145/2629500 |
| 27 | BERNARDIN K, OGAWARA K, IKEUCHI K, et al. A sensor fusion approach for recognizing continuous human grasping sequences using hidden Markov models [J]. IEEE Transactions on Robotics and Automation, 2005, 21(1): 47-57. 10.1109/tro.2004.833816 |
| 28 | T-H PHAM, KYRIAZIS N, ARGYROS A A, et al. Hand-object contact force estimation from marker less visual tracking [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(12): 2883-2896. 10.1109/tpami.2017.2759736 |
| 29 | ROGEZ G, SUPANCIC J S, RAMANAN D, et al. Understanding everyday hands in action from RGB-D images [C]// Proceedings of the 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2015: 3889-3897. 10.1109/iccv.2015.443 |
| 30 | 尤晨晨.抓取数据集构建及未知物体抓取显著性预测[D].济南:山东大学, 2021. |
| YOU C C. Construction if grasping data set and prediction of grasping salience of unknown objects [D]. Jinan: Shandong University, 2021. | |
| 31 | BRAHMBHATT S, TANG C, TWIGG C D, et al. ContactPose: A dataset of grasps with object contact and hand pose [C]// Proceedings of the 2020 European Conference on Computer Vision. Cham: Springer, 2020: 361-378. 10.1007/978-3-030-58601-0_22 |
| 32 | LAU M, DEV K, SHI W, et al. Tactile mesh saliency [J]. ACM Transactions on Graphics, 2016, 35(4): No. 52. 10.1145/2897824.2925927 |
| 33 | ZHANG L-N, WANG Y, ZHOU J, et al. 3D grasp saliency analysis via deep shape correspondence [J]. Computer Aided Geometric Design, 2020, 81: 101901. 10.1016/j.cagd.2020.101901 |
| 34 | MILLER A T, ALLEN P K. Graspit! A versatile simulator for robotic grasping [J]. IEEE Robotics & Automation Magazine, 2004, 11(4): 110-122. 10.1109/mra.2004.1371616 |
| 35 | HAMER H, GALL J, WEISE T, et al. An object-dependent hand pose prior from sparse training data [C]// Proceedings of the 2010 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2010: 671-678. 10.1109/cvpr.2010.5540150 |
| 36 | JIANG Y, MOSESON S, SAXENA A. Efficient grasping from RGBD images: Learning using a new rectangle representation [C]// Proceedings of the 2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2011: 3304-3311. 10.1109/icra.2011.5980145 |
| 37 | PINTO L, GUPTA A, et al. Supersizing self-supervision: Learning to grasp from 50K tries and 700 robot hours [C]// Proceedings of the 2016 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2016: 3406-3413. 10.1109/icra.2016.7487517 |
| 38 | YAN X, HSU J, KHANSARI M, et al. Learning 6-DOF grasping interaction via deep geometry aware 3D representations [C]// Proceedings of the 2018 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2018: 3766-3773. 10.1109/icra.2018.8460609 |
| 39 | LWOWSKI J, MAJUMDAT A, BENAVIDEZ P, et al. HTC vive tracker: Accuracy for indoor location [J]. IEEE Systems, Man, and Cybernetics Magazine, 2020, 6(4): 15-22. 10.1109/msmc.2020.2969031 |
| 40 | QI C R, YI L, SU H, et al. PointNet++: Deep hierarchical feature learning on point sets in a metric space [C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 5105-5114. |
| 41 | WELLING M, THE Y W. Bayesian learning via stochastic gradient Langevin dynamics [C]// Proceedings of the 28 th International Conference on Machine Learning. Madison: Omnipress, 2011: 681-688. |
| 42 | KIRKPATRICK S, GELATT C D, Jr, VECCHI M P. Optimization by simulated annealing [J]. Science, 1983, 220(4598): 671-680. 10.1126/science.220.4598.671 |
| [1] | Jieke WANG, Lin LI, Hailong ZHANG, Liping ZHENG. Passive haptic interaction method for multiple virtual targets in vast virtual reality space [J]. Journal of Computer Applications, 2022, 42(11): 3544-3550. |
| [2] | Shouming HOU, Chaolan JIA, Mingmin ZHANG. Review of eye movement‑based interaction techniques for virtual reality systems [J]. Journal of Computer Applications, 2022, 42(11): 3534-3543. |
| [3] | WANG Yi, LYU Jian, YOU Qian, ZHAO Zeyu, YAN Baoming, ZHU Shuman. Virtual reality arbitrary shape selection model based on Fitts' law [J]. Journal of Computer Applications, 2020, 40(11): 3320-3326. |
| [4] | HU Min, LI Chong, LU Rongrong, HUANG Hongcheng. Performance analysis of motor imagery training based on 3D visual guidance [J]. Journal of Computer Applications, 2018, 38(3): 836-841. |
| [5] | LIN Chang, LI Guoping, ZHAO Haiwu, WANG Guozhong, GU Xiao. Double ring mapping projection for panoramic video [J]. Journal of Computer Applications, 2017, 37(9): 2631-2635. |
| [6] | WU Saiwen, CHEN Jian, SUN Xiaoying. Electrostatic force tactile rendering method for video perception [J]. Journal of Computer Applications, 2016, 36(4): 1137-1140. |
| [7] | LI Danni, LIU Qi, TIAN Qi, ZHAO Leiyu, HE Ling, HUANG Yunzhi, ZHANG Jing. Design of virtual surgery system in reduction of maxillary fracture [J]. Journal of Computer Applications, 2015, 35(6): 1730-1733. |
| [8] | CAO Yanjue, AN Bowen, LI Qiming. Real-time simulation and application of depth-of-field based on post-processing [J]. Journal of Computer Applications, 2015, 35(5): 1439-1443. |
| [9] | YANG Xiaowen, ZHANG Zhichun, KUANG liqun, HAN Xie. Key technologies of human-computer interaction based on virtual hand [J]. Journal of Computer Applications, 2015, 35(10): 2945-2949. |
| [10] | . Automatic path finding method for real-time rendering of 3D scene [J]. Journal of Computer Applications, 2010, 30(1): 85-89. |
| [11] | . Realistic simulation of plant based on geometry parameter [J]. Journal of Computer Applications, 2009, 29(1): 97-100. |
| [12] | . Curved surface modeling and texture acquisition from three images [J]. Journal of Computer Applications, 2007, 27(2): 470-472. |
| [13] | . Study on model transformation and computer demonstration of virtual prototype [J]. Journal of Computer Applications, 2006, 26(9): 2057-2058. |
| [14] | . Level-of-detail technology of animation and collision in virtual reality [J]. Journal of Computer Applications, 2006, 26(11): 2730-2732. |
| [15] | WANG Yi-yuan,CHEN Fu-min. Real-time synchronization algorithm based on blending of motions in VR [J]. Journal of Computer Applications, 2005, 25(08): 1951-1953. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||