


Journal of Computer Applications ›› 2024, Vol. 44 ›› Issue (7): 2294-2300.DOI: 10.11772/j.issn.1001-9081.2023070898
• Frontier and comprehensive applications • Previous Articles Next Articles
Ying HU1,2, Zhihuan CHEN1,2( )
)
Received:2023-07-10
Revised:2023-09-15
Accepted:2023-09-19
Online:2023-10-26
Published:2024-07-10
Contact:
Zhihuan CHEN
About author:HU Ying, born in 1998, M. S. candidate. His research interests include mobile robot control.Supported by:
胡映1,2, 陈志环1,2()
通讯作者:
陈志环
作者简介:胡映(1998—),男,湖北黄冈人,硕士研究生,主要研究方向:移动机器人控制;基金资助:CLC Number:
Ying HU, Zhihuan CHEN. Trajectory tracking control of wheeled mobile robots under side-slip and slip[J]. Journal of Computer Applications, 2024, 44(7): 2294-2300.
胡映, 陈志环. 侧滑和打滑下的轮式移动机器人轨迹跟踪控制[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2294-2300.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2023070898
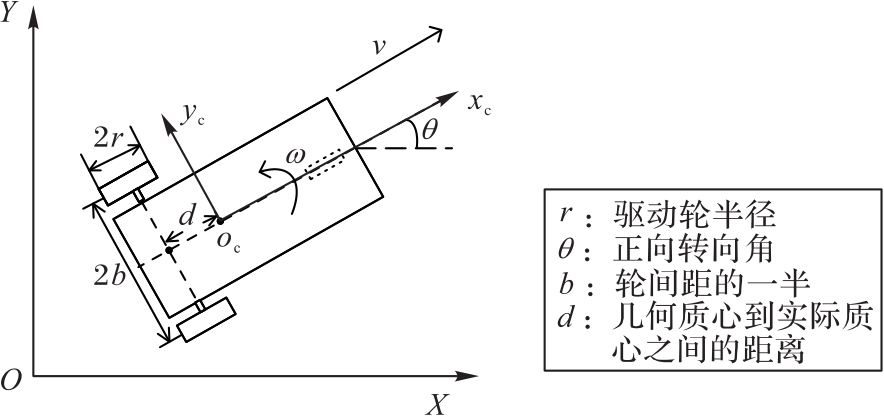
Fig. 1 Schematic diagram of wheeled mobile robot
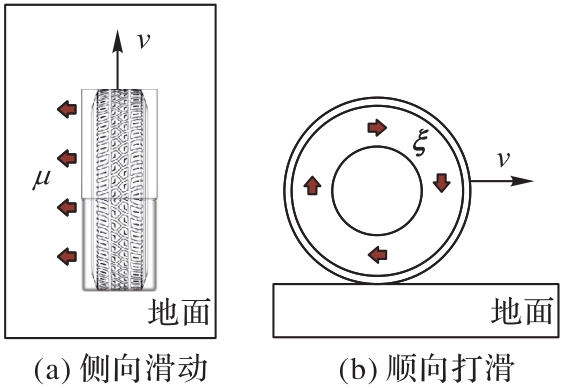
Fig. 2 Schematic diagram of side-slipping and slipping
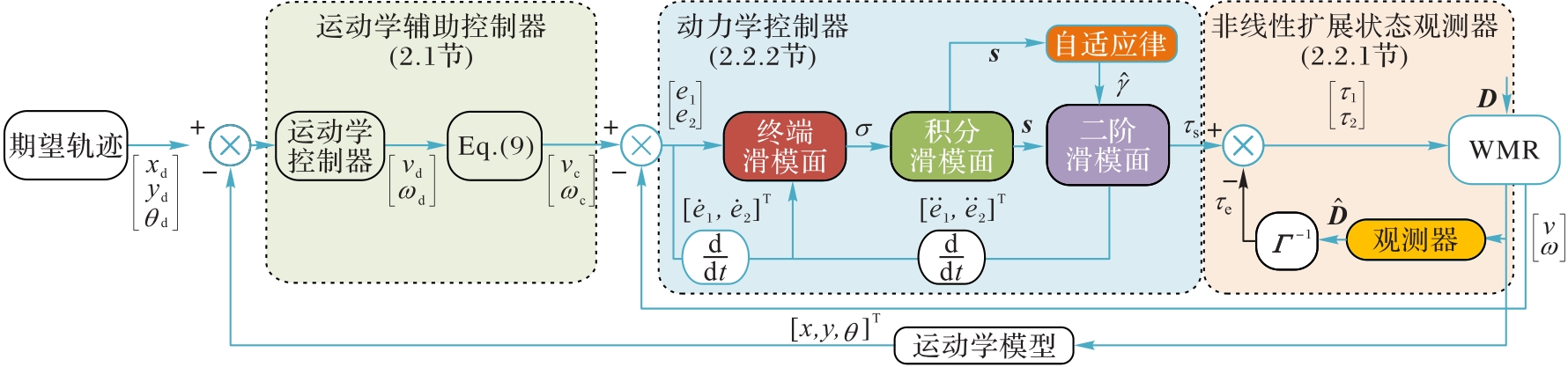
Fig. 3 Control system block diagram
| 轨迹类型 | 均方误差 | 误差最大值 | 误差最小值 | |||
|---|---|---|---|---|---|---|
| ASMC-NESO | ASOSMC-NESO | ASMC-NESO | ASOSMC-NESO | ASMC-NESO | ASOSMC-NESO | |
| 直线轨迹 | 0.487 0 | 0.384 1 | 0.072 6 | 0.007 6 | 0 | 0 |
| 圆形轨迹 | 2.183 7 | 1.074 9 | 0.551 6 | 0.461 8 | 0 | 0 |
Tab. 1 Error performance index comparison
| 轨迹类型 | 均方误差 | 误差最大值 | 误差最小值 | |||
|---|---|---|---|---|---|---|
| ASMC-NESO | ASOSMC-NESO | ASMC-NESO | ASOSMC-NESO | ASMC-NESO | ASOSMC-NESO | |
| 直线轨迹 | 0.487 0 | 0.384 1 | 0.072 6 | 0.007 6 | 0 | 0 |
| 圆形轨迹 | 2.183 7 | 1.074 9 | 0.551 6 | 0.461 8 | 0 | 0 |
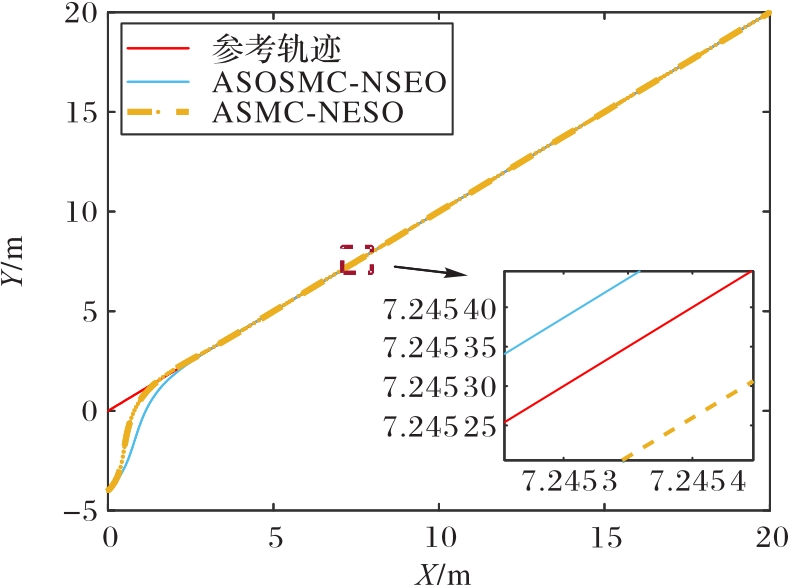
Fig. 4 Comparison of straight line trajectory
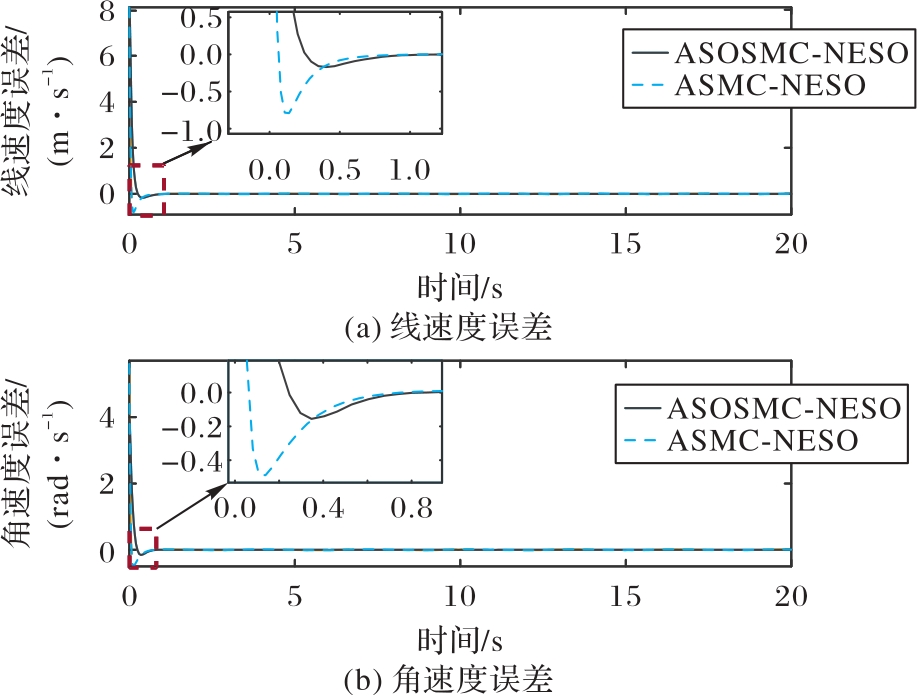
Fig. 5 Comparison of velocity error under straight line trajectory
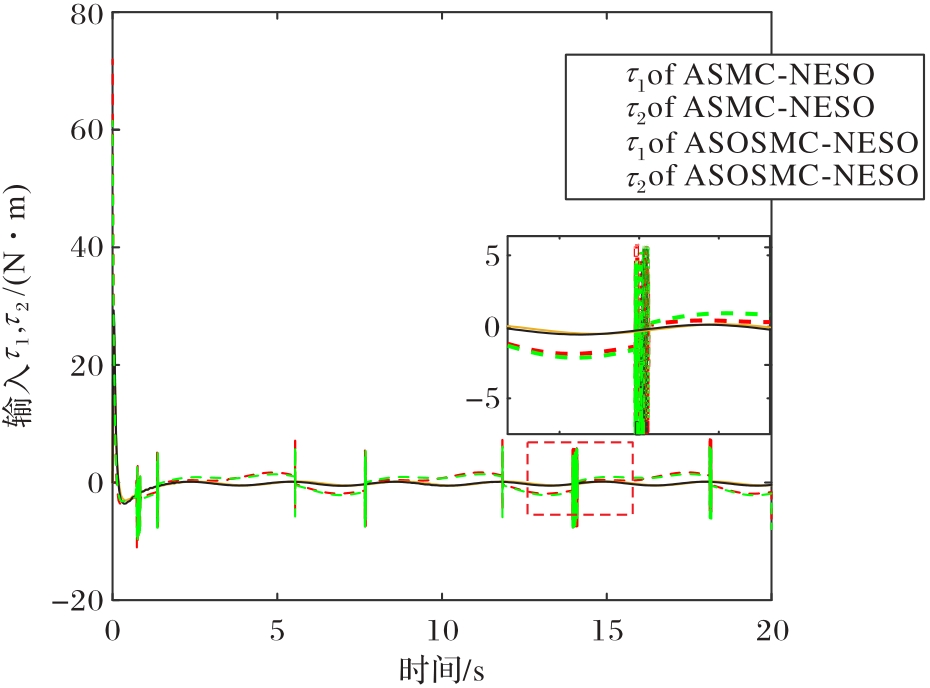
Fig. 6 Comparison of torque input under straight line trajectory
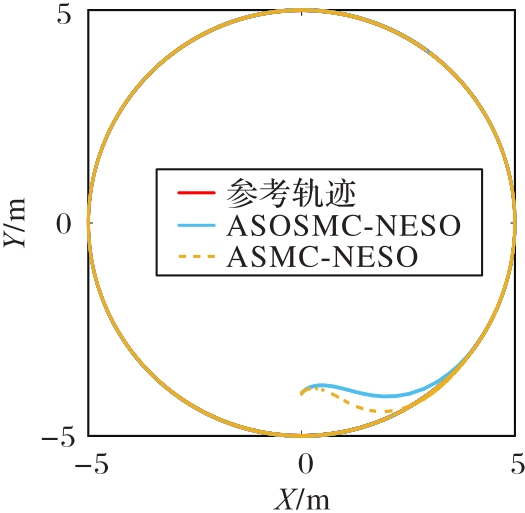
Fig. 7 Comparison of circular trajectory
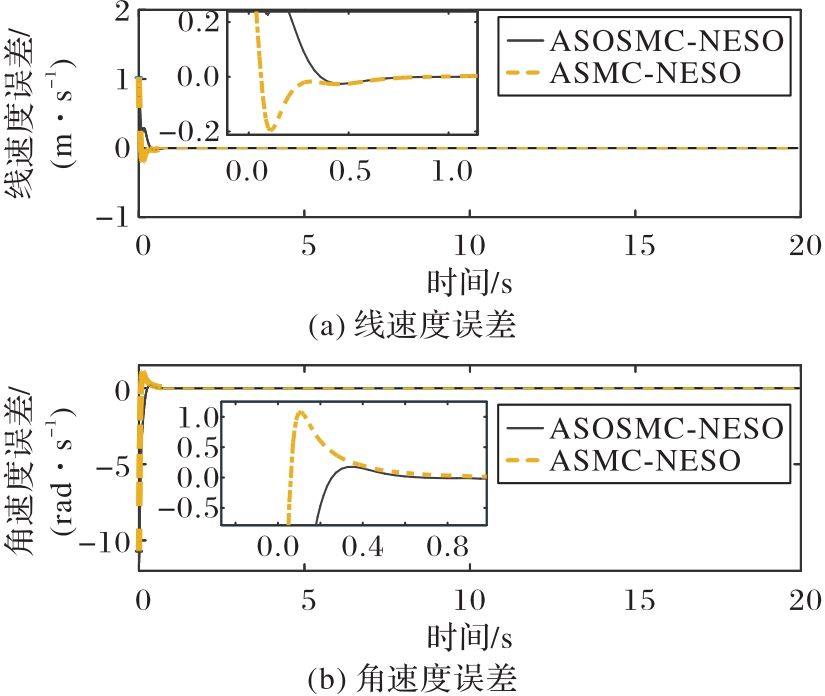
Fig. 8 Comparison of velocity error under circular trajectory
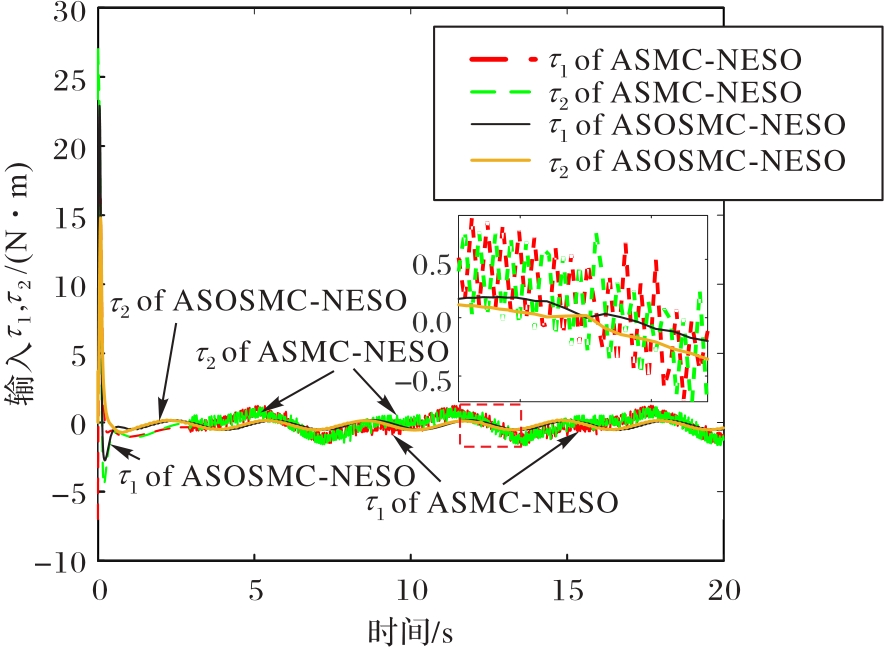
Fig. 9 Comparison of torque input under circular trajectory
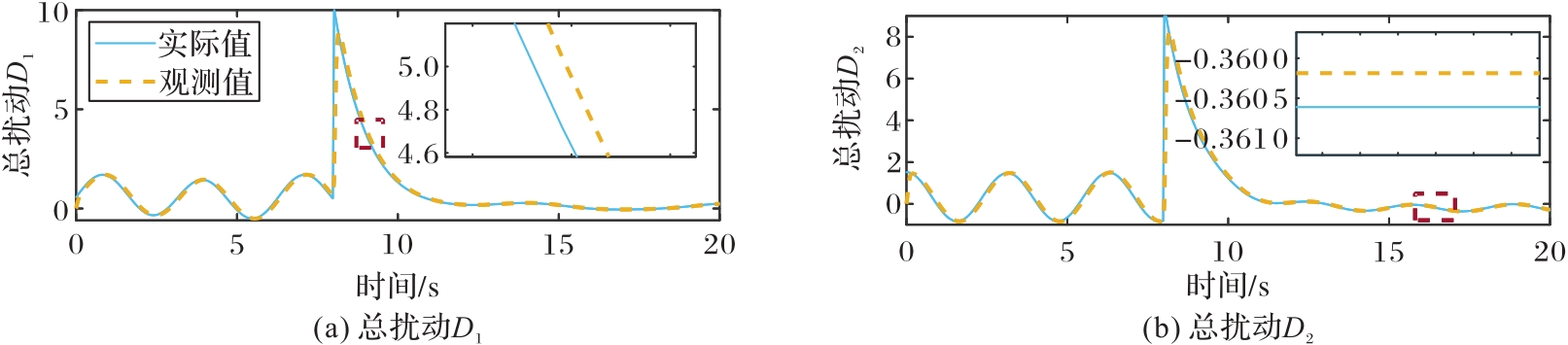
Fig. 10 Total disturbance estimation
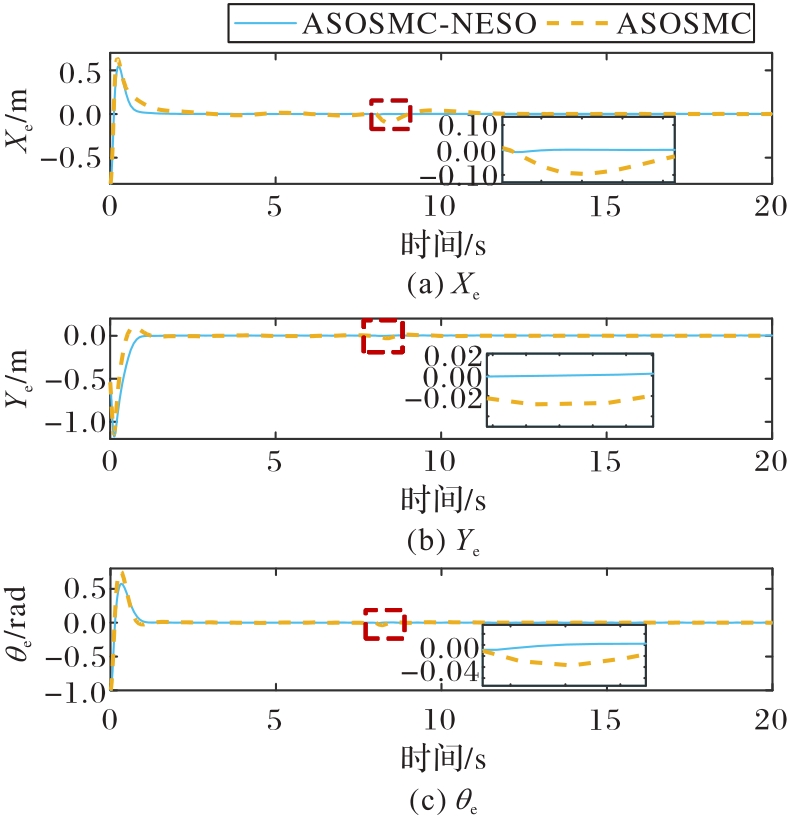
Fig. 11 Comparison of pose error under sudden change of interference
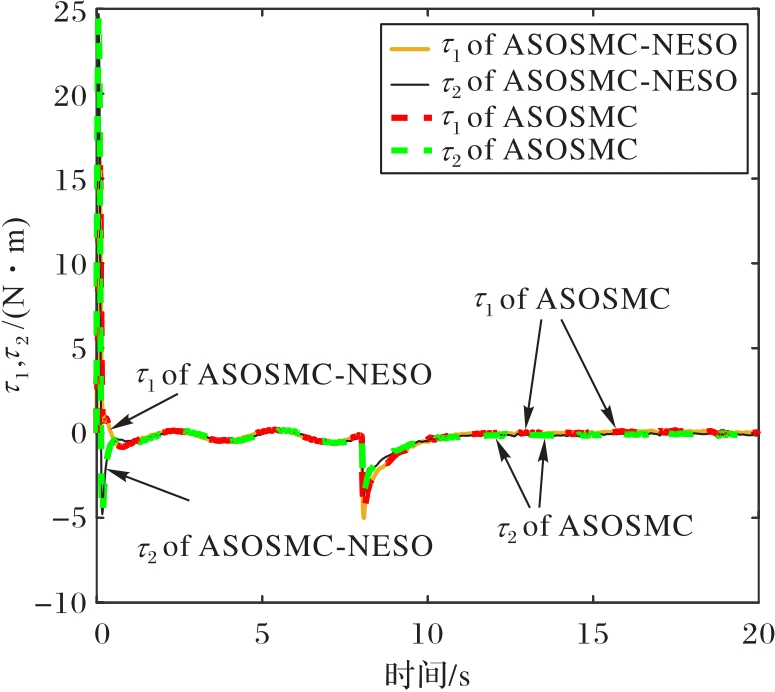
Fig. 12 Comparison of moment input under sudden change of interference
| 跟踪误差 | ISE | IAE | ITAE | |||
|---|---|---|---|---|---|---|
| ASOSMC | ASOSMC-NESO | ASOSMC | ASOSMC-NESO | ASOSMC | ASOSMC-NESO | |
| xe/m | 0.874 4 | 0.773 8 | 5.805 7 | 3.262 6 | 47.834 0 | 23.838 7 |
| ye/m | 3.006 0 | 2.937 7 | 10.762 9 | 10.345 9 | 99.571 4 | 83.150 0 |
| θe/rad | 1.236 9 | 1.222 9 | 4.884 9 | 3.578 1 | 29.591 1 | 17.432 5 |
Tab. 2 Comparison of error performance indexes under sudden change of interference
| 跟踪误差 | ISE | IAE | ITAE | |||
|---|---|---|---|---|---|---|
| ASOSMC | ASOSMC-NESO | ASOSMC | ASOSMC-NESO | ASOSMC | ASOSMC-NESO | |
| xe/m | 0.874 4 | 0.773 8 | 5.805 7 | 3.262 6 | 47.834 0 | 23.838 7 |
| ye/m | 3.006 0 | 2.937 7 | 10.762 9 | 10.345 9 | 99.571 4 | 83.150 0 |
| θe/rad | 1.236 9 | 1.222 9 | 4.884 9 | 3.578 1 | 29.591 1 | 17.432 5 |
| 1 | 张小俊,刘昊学.轮式移动机器人轨迹跟踪控制研究[J].计算机工程与科学, 2022, 44(10): 1804-1811. |
| ZHANG X J, LIU H X. Research on trajectory tracking control of wheeled mobile robot [J]. Computer Engineering & Science, 2022, 44(10): 1804-1811. | |
| 2 | 彭继慎,仇文超,李军锋,等.农业轮式移动机器人反演自适应滑模轨迹跟踪控制[J].计算机应用与软件, 2019, 36(11): 86-90. |
| PENG J S, QIU W C, LI J F, et al. Inversion adaptive sliding model path tracking control of agricultural wheeled mobile robot [J]. Computer Applications and Software, 2019, 36(11): 86-90. | |
| 3 | 王韬.基于小波神经网络模糊滑模控制的轮式移动机器人避障研究[J].中国工程机械学报, 2020, 18(3): 278-282. |
| WANG T. Research on obstacle avoidance of wheeled mobile robot based on wavelet neural network and fuzzy sliding mode control [J]. Chinese Journal of Construction Machinery, 2020, 18(3): 278-282. | |
| 4 | CHEN C-T. Hybrid visual servo control for point-to-point localization of an autonomous wheeled mobile robot [J]. International Journal of iRobotics, 2022, 5(2): 20-28. |
| 5 | JABEUR C BEN, SEDDIK H. Design of a PID optimized neural networks and PD fuzzy logic controllers for a two-wheeled mobile robot [J]. Asian Journal of Control, 2021, 23(1): 23-41. |
| 6 | YI S, ZHAI J. Adaptive second-order fast nonsingular terminal sliding mode control for robotic manipulators [J]. ISA Transactions, 2019, 90: 41-51. |
| 7 | 张鑫,王群京,李国丽,等.滑移扰动下轮式移动机器人神经滑模跟踪控制研究[J].制造业自动化, 2022, 44(12): 147-151. |
| ZHANG X, WANG Q J, LI G L, et al. Neural sliding mode tracking control of wheeled mobile robot under slip disturbance [J]. Manufacturing Automation, 2022, 44(12): 147-151. | |
| 8 | 陈勇,刘哲,乔健,等.轮式机器人移动过程中滑模控制策略的研究[J].控制工程, 2021, 28(5): 963-970. |
| CHEN Y, LIU Z, QIAO J, et al. Research on sliding mode control strategy of wheeled robot in moving process [J]. Control Engineering of China, 2021, 28(5): 963-970. | |
| 9 | PENG S, SHI W. Adaptive fuzzy integral terminal sliding mode control of a nonholonomic wheeled mobile robot [J]. Mathematical Problems in Engineering, 2017, 2017: 3671846. |
| 10 | XIE H, ZHENG J, CHAI R, et al. Robust tracking control of a differential drive wheeled mobile robot using fast nonsingular terminal sliding mode [J]. Computers & Electrical Engineering, 2021, 96: 107488. |
| 11 | ZHAI J, SONG Z. Adaptive sliding mode trajectory tracking control for wheeled mobile robots [J]. International Journal of Control, 2019, 92(10): 2255-2262. |
| 12 | BESSAS A, BENALIA A, BOUDJEMA F. Integral sliding mode control for trajectory tracking of wheeled mobile robot in presence of uncertainties [J]. Journal of Control Science and Engineering, 2016, 2016: 7915375. |
| 13 | WANG G, ZHOU C, YU Y, et al. Adaptive sliding mode trajectory tracking control for WMR considering skidding and slipping via extended state observer [J]. Energies, 2019, 12(17): 3305. |
| 14 | DAMANI A Y, BENSELAMA Z A, HEDJAR R. Formation control of nonholonomic wheeled mobile robots via fuzzy fractional-order integral sliding mode control [J]. International Journal of Dynamics and Control, 2023, 11: 2273-2284. |
| 15 | ZHANG H, LI B, XIAO B, et al. Nonsingular recursive-structure sliding mode control for high-order nonlinear systems and an application in a wheeled mobile robot [J]. ISA Transactions, 2022, 130: 553-564. |
| 16 | 李振阳,董方明,佃松宜,等.侧滑打滑时的WMR抗饱和模糊超螺旋滑模控制[J].计算机仿真, 2022, 39(2): 387-393. |
| LI Z Y, DONG F M, DIAN S Y, et al. Anti-windup fuzzy super-twisting sliding mode control of WMRs with skidding and slipping [J]. Computer Simulation, 2022, 39(2): 387-393. | |
| 17 | LI B, ZHANG H, XIAO B, et al. Fixed-time integral sliding mode control of a high-order nonlinear system [J]. Nonlinear Dynamics, 2022, 107: 909-920. |
| 18 | MOUDOUD B, AISSAOUI H, DIANY M. Extended state observer-based finite-time adaptive sliding mode control for wheeled mobile robot [J]. Journal of Control and Decision, 2022, 9(4): 465-476. |
| 19 | YANG X, WEI P, ZHANG Y, et al. Disturbance observer based on biologically inspired integral sliding mode control for trajectory tracking of mobile robots [J]. IEEE Access, 2019, 7: 48382-48391. |
| 20 | YOO S J. Adaptive tracking control for a class of wheeled mobile robots with unknown skidding and slipping [J]. IET Control Theory & Applications, 2010, 4(10): 2109-2119. |
| 21 | GUO Y. Fixed-time disturbance observer based robust tracking control of wheeled mobile robot with multiple disturbances [J]. Measurement and Control, 2023, 56(9/10): 1626-1636. |
| 22 | 王立玲,董力元,马东,等.滑动与打滑条件下的轮式移动机器人自抗扰跟踪控制[J].控制理论与应用, 2020, 37(2): 431-438. |
| WANG L L, DONG L Y, MA D, et al. Active disturbance rejection tracking control of wheeled mobile robots under sliding and slipping conditions [J]. Control Theory & Applications, 2020, 37(2): 431-438. | |
| 23 | MORENO J A, NEGRETE D Y, TORRES-GONZÁLEZ V, et al. Adaptive continuous twisting algorithm [J]. International Journal of Control, 2016, 89(9): 1798-1806. |
| 24 | 鄂东辰,路时雨,刘超强,等.电液位置伺服系统的自适应抗饱和控制[J].机床与液压, 2022, 50(22): 48-53. |
| E D C, LU S Y, LIU C Q, et al. Adaptive anti saturation control for electro-hydraulic position servo system [J]. Machine Tool & Hydraulics, 2022, 50(22): 48-53. |
| [1] | Huaxia LI, Xiaorong HUANG, Anlin SHEN, Peng JIANG, Yiqiang PENG, Liqi SUI. Trajectory tracking of caster-type omnidirectional mobile platform based on MPC and PID [J]. Journal of Computer Applications, 2024, 44(7): 2285-2293. |
| [2] | Xuguang LIU, Changping DU, Yao ZHENG. Trajectory control of quadrotor based on reinforcement learning-iterative learning [J]. Journal of Computer Applications, 2022, 42(12): 3950-3956. |
| [3] | LUO Rui, SHI Wuxi, LI Baoquan. Active disturbance rejection control for mobile robot with skidding and slipping [J]. Journal of Computer Applications, 2018, 38(5): 1517-1522. |
| [4] | ZHANG Kun, GAO Xiaoguang. Adaptive tracking control for unmanned aerial vehicle's three dimensional trajectory [J]. Journal of Computer Applications, 2016, 36(9): 2631-2635. |
| [5] | CAI Zhuang ZHANG Guoliang TIAN Qi. Trajectory tracking control of manipulator based on FSMC [J]. Journal of Computer Applications, 2014, 34(1): 232-235. |
| [6] | ZHANG Yang-ming LIU Guo-rong LIU Dong-bo LIU Huan. Trajectory tracking control based on Lyapunov and Terminal sliding mode [J]. Journal of Computer Applications, 2012, 32(11): 3243-3246. |
| [7] | Guo-liang ZHANG Lei AN Wen-jun TANG. Trajectory tracking control of three-wheeled mobile robot [J]. Journal of Computer Applications, 2011, 31(08): 2293-2296. |
| [8] | . Trajectory tracking of mobile robot using iterative learning control in polar coordinates [J]. Journal of Computer Applications, 2010, 30(8): 2017-2020. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||