


Journal of Computer Applications ›› 2024, Vol. 44 ›› Issue (7): 2285-2293.DOI: 10.11772/j.issn.1001-9081.2023071003
• Frontier and comprehensive applications • Previous Articles Next Articles
Huaxia LI1, Xiaorong HUANG1,2,3, Anlin SHEN1,2,3, Peng JIANG1, Yiqiang PENG1,2,3( ), Liqi SUI4
), Liqi SUI4
Received:2023-07-25
Revised:2023-09-26
Accepted:2023-09-28
Online:2023-10-26
Published:2024-07-10
Contact:
Yiqiang PENG
About author:LI Huaxia, born in 1998, M. S. candidate. His research interests include motion control of wheeled mobile robot.Supported by:
李华夏1, 黄晓蓉1,2,3, 沈安林1,2,3, 蒋鹏1, 彭忆强1,2,3(), 隋立起4
通讯作者:
彭忆强
作者简介:李华夏(1998—),男,四川成都人,硕士研究生,主要研究方向:轮式移动机器人运动控制;基金资助:CLC Number:
Huaxia LI, Xiaorong HUANG, Anlin SHEN, Peng JIANG, Yiqiang PENG, Liqi SUI. Trajectory tracking of caster-type omnidirectional mobile platform based on MPC and PID[J]. Journal of Computer Applications, 2024, 44(7): 2285-2293.
李华夏, 黄晓蓉, 沈安林, 蒋鹏, 彭忆强, 隋立起. 基于MPC和PID的脚轮式全向移动平台轨迹跟踪[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2285-2293.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2023071003
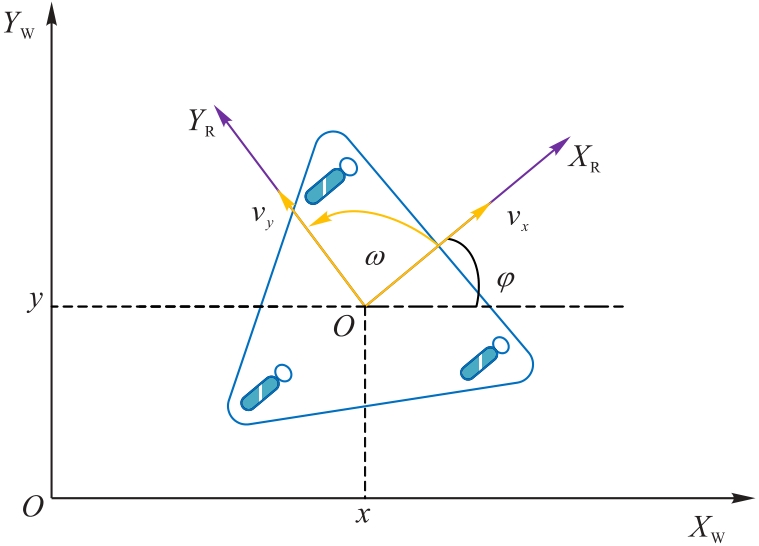
Fig. 1 Three-degree-of-freedom kinematic model of platform under world coordinate system
| 参数 | 含义 |
|---|---|
| 世界坐标系 | |
| 机器人坐标系 | |
| 脚轮式全向移动平台的横坐标位置 | |
| 脚轮式全向移动平台的纵坐标位置 | |
| 脚轮式全向移动平台的朝向角 | |
| 沿 | |
| 沿 | |
| 脚轮式全向移动平台自转角速度 |
Tab. 1 Explanation of symbolic parameters for three-degree-of-freedom kinematic model of the platform
| 参数 | 含义 |
|---|---|
| 世界坐标系 | |
| 机器人坐标系 | |
| 脚轮式全向移动平台的横坐标位置 | |
| 脚轮式全向移动平台的纵坐标位置 | |
| 脚轮式全向移动平台的朝向角 | |
| 沿 | |
| 沿 | |
| 脚轮式全向移动平台自转角速度 |
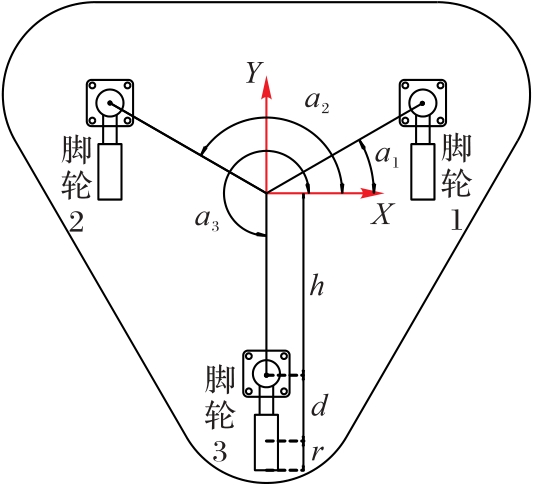
Fig. 2 Schematic diagram of platform structure
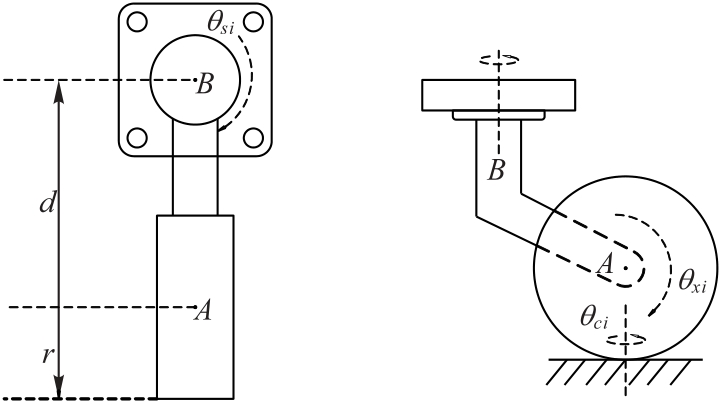
Fig. 3 Schematic diagram of caster structure
| 符号 | 参数含义 | 取值 |
|---|---|---|
| 车轮中心 | ||
| 转向轴中心 | ||
| 轮地接触点 | ||
| 脚轮 | ||
| 脚轮 | ||
| 脚轮 | ||
| 脚轮 | ||
| 脚轮半径 | 0.1 m | |
| 转向轴中心与轮心的偏置距离 | 0.15 m | |
| 转向轴中心与平台中心连线长度 | 0.5 m | |
| 转向轴中心与平台中心连线与X轴的夹角 | ||
| 平台中心点的速度矢量 |
Tab. 2 Kinematic model parameters of platform under robot coordinate system
| 符号 | 参数含义 | 取值 |
|---|---|---|
| 车轮中心 | ||
| 转向轴中心 | ||
| 轮地接触点 | ||
| 脚轮 | ||
| 脚轮 | ||
| 脚轮 | ||
| 脚轮 | ||
| 脚轮半径 | 0.1 m | |
| 转向轴中心与轮心的偏置距离 | 0.15 m | |
| 转向轴中心与平台中心连线长度 | 0.5 m | |
| 转向轴中心与平台中心连线与X轴的夹角 | ||
| 平台中心点的速度矢量 |
| 方向 | |||
|---|---|---|---|
| 平行方向 | |||
| 垂直方向 |
Tab. 3 Speed orthogonal decomposition table for caster-type omnidirectional mobile platform
| 方向 | |||
|---|---|---|---|
| 平行方向 | |||
| 垂直方向 |
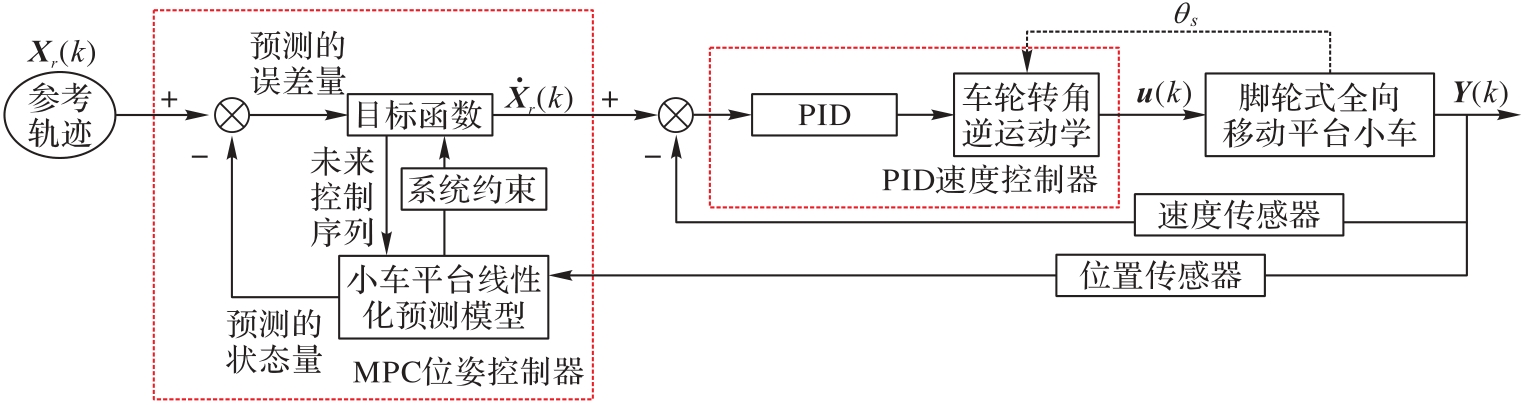
Fig. 4 MPC and PID double closed-loop control block diagram
| 控制器 | 参数 | 作用 |
|---|---|---|
| 位姿控制器 | 影响控制系统对轨迹跟踪的精确度和行驶稳定性 | |
| 影响系统的响应速度 | ||
| 影响控制系统执行算法的速率 | ||
| 保证控制系统对参考轨迹的跟踪精度 | ||
| 保证控制系统较为平稳的控制平台跟踪上参考轨迹 | ||
| 速度控制器 | 减少系统的偏差 | |
| 消除静差,提高系统的无差度 | ||
| 反映系统偏差的变化趋势,加快系统的响应 |
Tab. 4 Role description of key parameters of MPC and PID double closed-loop control strategy
| 控制器 | 参数 | 作用 |
|---|---|---|
| 位姿控制器 | 影响控制系统对轨迹跟踪的精确度和行驶稳定性 | |
| 影响系统的响应速度 | ||
| 影响控制系统执行算法的速率 | ||
| 保证控制系统对参考轨迹的跟踪精度 | ||
| 保证控制系统较为平稳的控制平台跟踪上参考轨迹 | ||
| 速度控制器 | 减少系统的偏差 | |
| 消除静差,提高系统的无差度 | ||
| 反映系统偏差的变化趋势,加快系统的响应 |
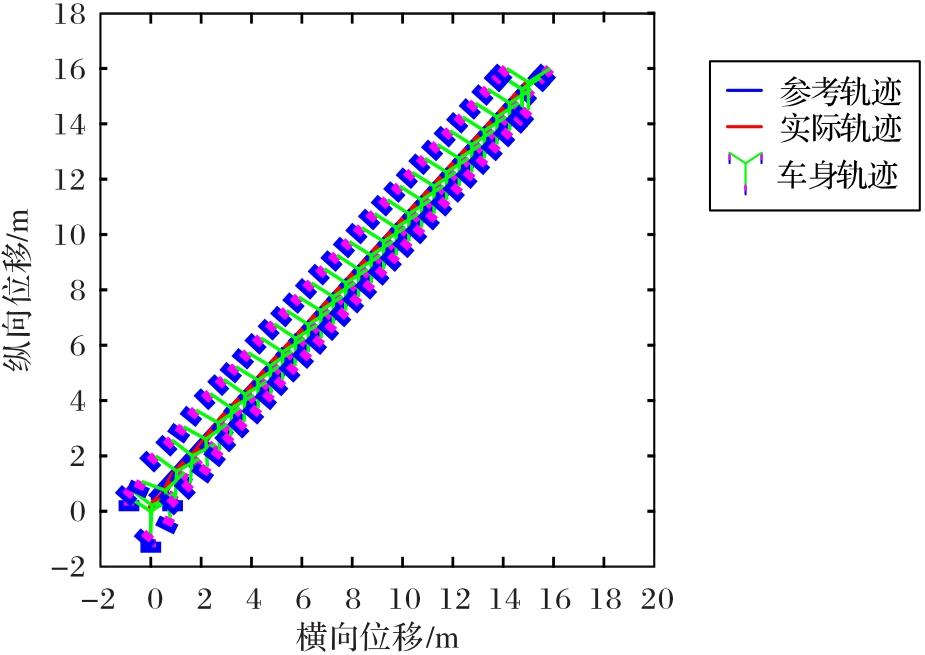
Fig. 5 Linear tracking trajectory of body
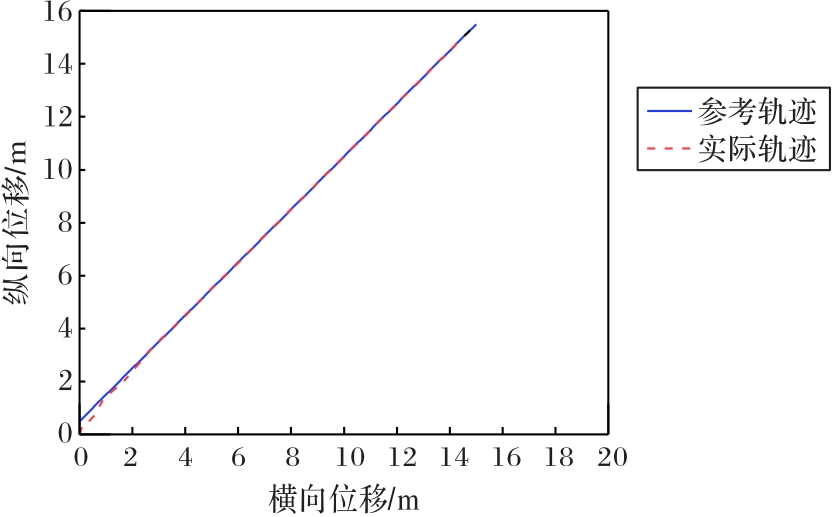
Fig. 6 Tracking curve of linear trajectory
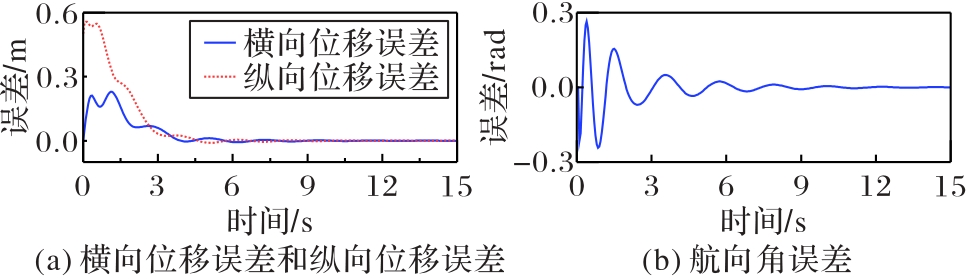
Fig. 7 Tracking position error of linear trajactory

Fig. 8 Velocity tracking curve of of linear trajactory
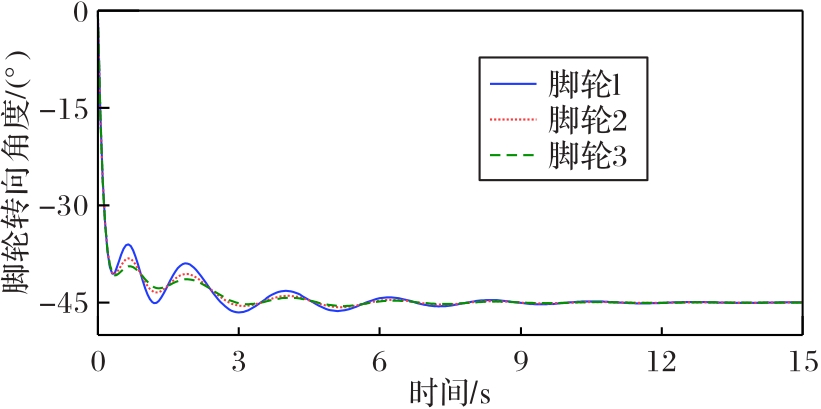
Fig. 9 Castor steering angle curve of linear trajactory
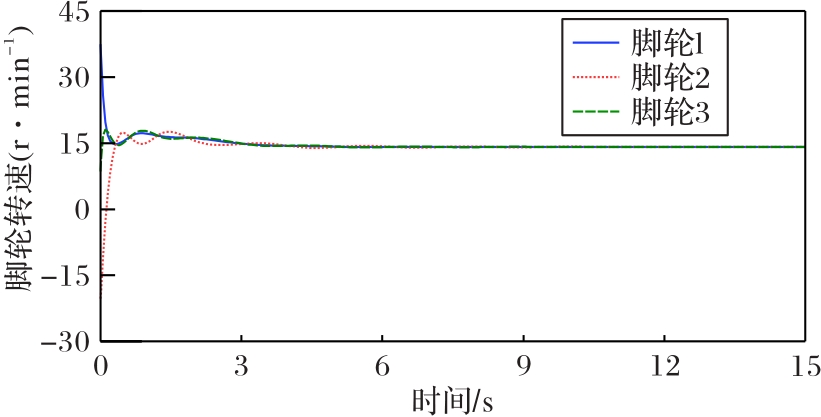
Fig. 10 Caster speed curve of linear trajectory
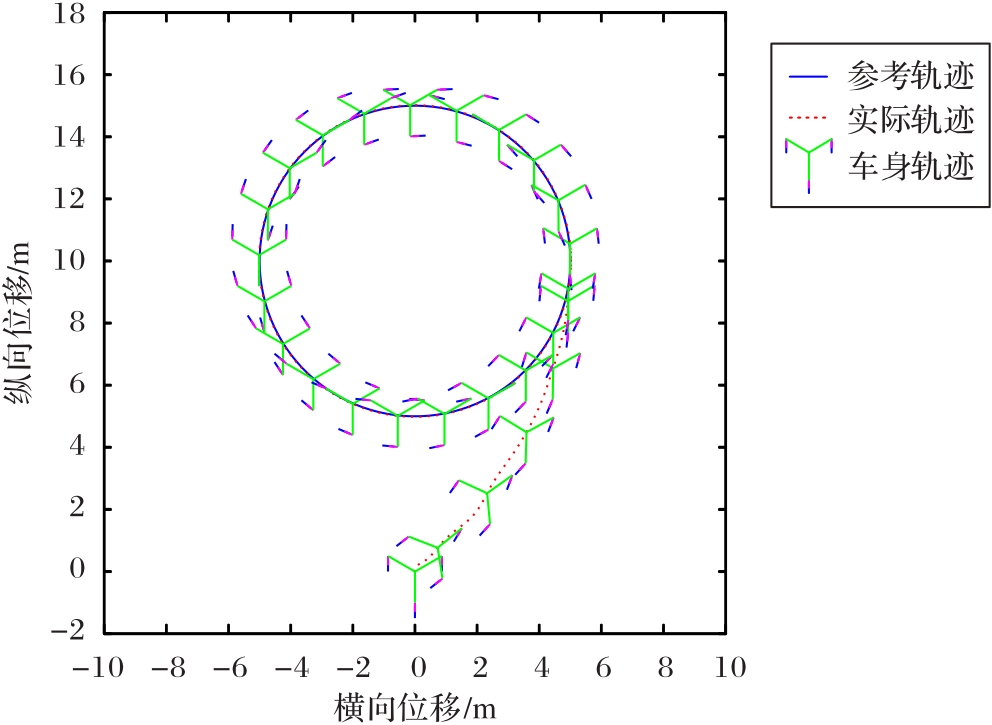
Fig. 11 Circular tracking trajectory of body
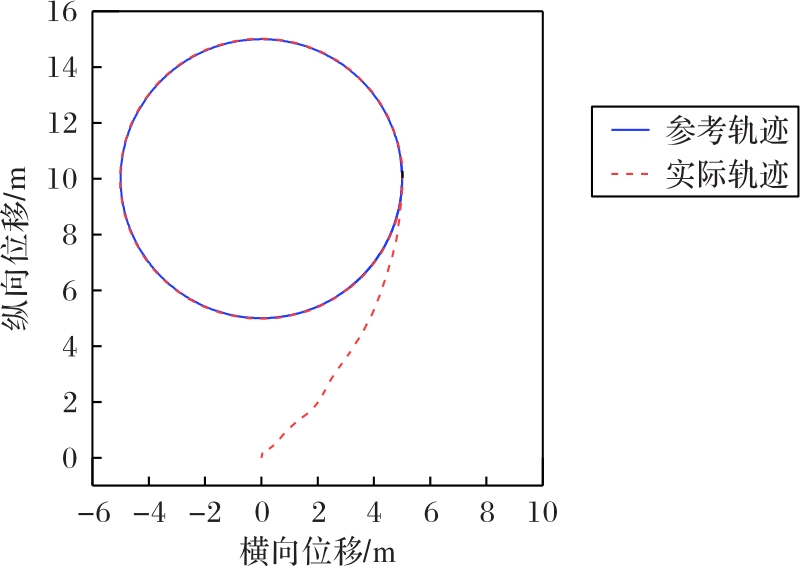
Fig. 12 Tracking curve of circular trajectory
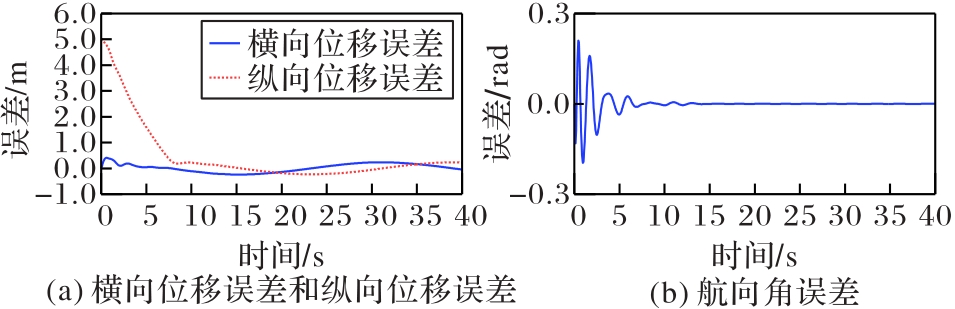
Fig. 13 Tracking position error of circular trajectory

Fig. 14 Speed tracking curve of circular trajectory
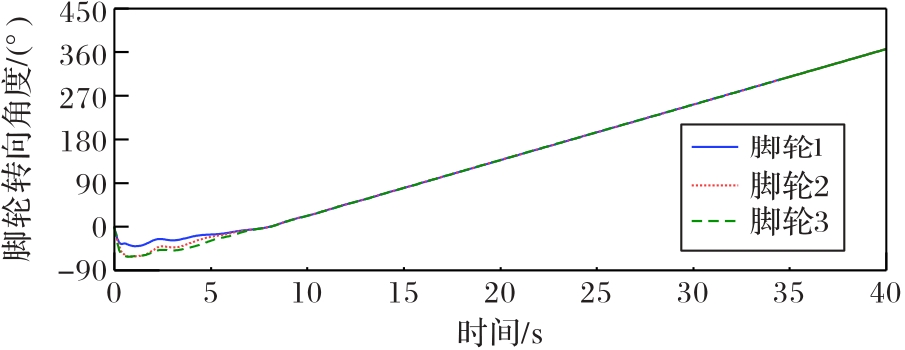
Fig. 15 Caster steering angle curve of circular trajectory
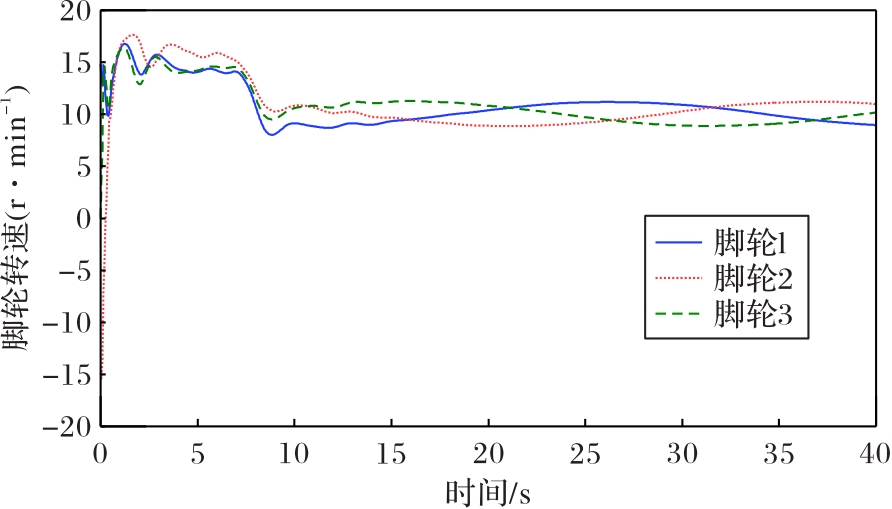
Fig. 16 Caster speed curve of circular trajectory
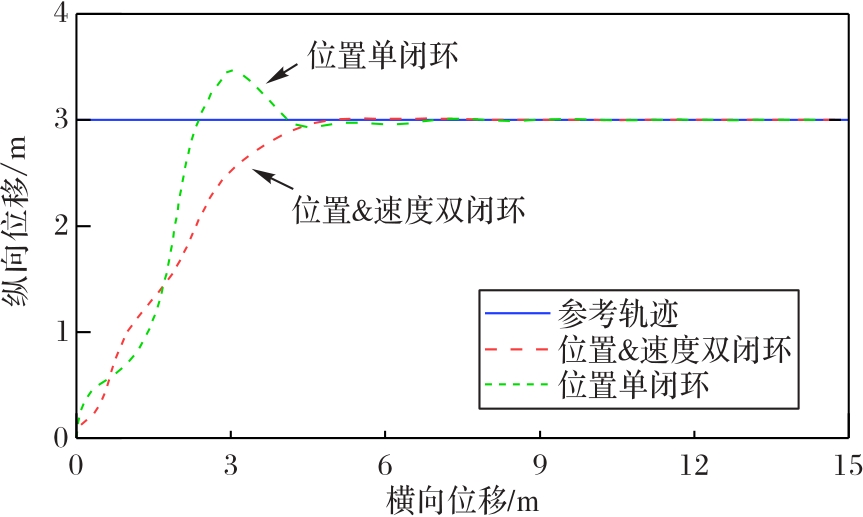
Fig. 17 Comparison of trajectory tracking under linear conditions

Fig. 18 Comparison of trajectory tracking error under linear conditions

Fig. 19 Comparison of speed tracking curves under linear conditions
| 1 | EL-SHENAWY A, WELLENREUTHER A, BAUMGART A S, et al. Comparing different holonomic mobile robots [C]// Proceedings of the 2007 IEEE International Conference on Systems, Man and Cybernetics. Piscataway: IEEE, 2007: 1584-1589. |
| 2 | CAO G, ZHAO X, YE C, et al. Fuzzy adaptive PID control method for multi-mecanum-wheeled mobile robot [J]. Journal of Mechanical Science and Technology, 2022, 36: 2019-2029. |
| 3 | ZHANG B, LI G, ZHENG Q, et al. Path planning for wheeled mobile robot in partially known uneven terrain [J]. Sensors, 2022, 22(14): 5217. |
| 4 | MONDAL S, RAY R, REDDY S, et al. Intelligent controller for nonholonomic wheeled mobile robot: a fuzzy path following combination [J]. Mathematics and Computers in Simulation, 2022, 193: 533-555. |
| 5 | ZHANG D, WANG G, WU Z. Reinforcement learning-based tracking control for a three mecanum wheeled mobile robot [J]. IEEE Transactions on Neural Networks and Learning Systems, 2024, 35(1): 1445-1452. |
| 6 | EL-SHENAWY A, WAGNER A, BADREDDIN E. Kinematics and dynamics analysis for a holonomic wheeled mobile robot [C]// Proceedings of the 4th International Conference on Informatics in Control, Automation and Robotics. Angers, France: INSTICC Press, 2007: 485-491. |
| 7 | EL-SHENAWY A, WAGNER A, BADREDDIN E. Dynamic model of a holonomic mobile robot with actuated caster wheels [C]// Proceedings of the 2006 9th International Conference on Control, Automation, Robotics and Vision. Piscataway: IEEE, 2006: 1-6. |
| 8 | EL-SHENAWY A, WAGNER A, BADREDDIN E. Solving the singularity problem for a holonomic mobile robot [J]. IFAC Proceedings Volumes, 2006, 39(16): 151-156. |
| 9 | EL-SHENAWY A, WAGNER A, BADREDDIN E. Controlling a holonomic mobile robot with singularities [C]// Proceedings of the 6th World Congress on Intelligent Control and Automation. Piscataway: IEEE, 2006: 8270-8274. |
| 10 | EL-SHENAWY A, WAGNER A, BADREDDIN E. Inverse dynamic solution for holonomic wheeled mobile robot with modular wheel actuation [C]// Proceedings of the 2007 European Control Conference. Piscataway: IEEE, 2007: 5486-5491. |
| 11 | EL-SHENAWY A, WAGNER A, BADREDDIN E. Practical construction and position control of a modular actuated holonomic wheeled mobile robot [C]// Proceedings of the 2008 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2008: 1672-1677. |
| 12 | 张天宇,彭忆强,黄晓蓉,等.脚轮式全向移动平台的运动控制设计与仿真[J].中国测试, 2021, 47(7): 109-118, 124. |
| ZHANG T Y, PENG Y Q, HUANG X R, et al. Motion control and simulation of caster wheeled omnidirectional mobile platform [J]. China Measurement & Testing Technology, 2021, 47(7): 109-118, 124. | |
| 13 | 黄晓蓉,张天宇,彭忆强,等.脚轮式全向移动平台负载变化时速度跟踪控制[J].西华大学学报(自然科学版), 2023, 42(2): 1-12, 19. |
| HUANG X R, ZHANG T Y, PENG Y Q, et al. Speed tracking control of caster-type omnidirectional mobile platform with variable load [J]. Journal of Xihua University (Natural Science Edition), 2023, 42(2): 1-12, 19. | |
| 14 | ZHANG Z, CHEN S, XU J, et al. Off-line identification of dynamic parameters of omnidirectional mobile robot based on decoupled powered caster wheels [C]// Proceedings of the 2022 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Piscataway: IEEE, 2022: 1321-1326. |
| 15 | JIANG S, LI Z, LIN S, et al. Design, control and experiments of an agile omnidirectional mobile robot with active suspension [C]// Proceedings of the 2022 IEEE 18th International Conference on Automation Science and Engineering. Piscataway: IEEE, 2022: 913-918. |
| 16 | YU Q, YANG G, DENG Y, et al. Energy-efficient trajectory planning for omnidirectional mobile robots with improved WDO algorithm [C]// Proceedings of the 2022 IEEE 17th Conference on Industrial Electronics and Applications. Piscataway: IEEE, 2022: 1116-1121. |
| 17 | MEDINA O, HACOHEN S. Overcoming kinematic singularities for motion control in a caster wheeled omnidirectional robot [J]. Robotics, 2021, 10(4): 133. |
| 18 | 张俊娜,白国星.基于速度调节与路径跟踪的差动机器人运动控制[J].工程科学学报, 2023, 45(9): 1550-1558. |
| ZHANG J N, BAI G X. Motion control of differential robot based on speed adjusting and path tracking [J]. Chinese Journal of Engineering, 2023, 45(9): 1550-1558. | |
| 19 | 杜荣华,胡鸿飞,高凯,等.基于变预测时域MPC的自动驾驶汽车轨迹跟踪控制研究[J].机械工程学报, 2022, 58(24): 275-288. |
| DU R H, HU H F, GAO K, et al. Research on trajectory tracking control of autonomous vehicle based on MPC with variable predictive horizon [J]. Journal of Mechanical Engineering, 2022, 58(24): 275-288. | |
| 20 | 许洋,秦小林,刘佳,等.多无人机自适应编队协同航迹规划[J].计算机应用, 2020, 40(5): 1515-1521. |
| XU Y, QIN X L, LIU J, et al. Multi-unmanned aerial vehicle adaptive formation cooperative trajectory planning [J]. Journal of Computer Applications, 2020, 40(5): 1515-1521. | |
| 21 | 王书亭,付清晨,蒋立泉,等.考虑绕障时耗的四轮全向移动机器人轨迹跟踪控制[J].华中科技大学学报(自然科学版), 2023, 51(6): 1-9. |
| WANG S T, FU Q C, JIANG L Q, et al. Trajectory tracking control of four-wheeled omnidirectional mobile robot considering time consumption in obstacle bypass [J]. Journal of Huazhong University of Science and Technology (Nature Science Edition), 2023, 51(6): 1-9. | |
| 22 | DING T, ZHANG Y, MA G, et al. Trajectory tracking of redundantly actuated mobile robot by MPC velocity control under steering strategy constraint [J]. Mechatronics, 2022, 84: 102779. |
| 23 | AZIZI M R, RASTEGARPANAH A, STOLKIN R. Motion planning and control of an omnidirectional mobile robot in dynamic environments [J]. Robotics, 2021, 10(1): 48. |
| 24 | LAFMEJANI A S, BERMAN S. Nonlinear MPC for collision-free and deadlock-free navigation of multiple nonholonomic mobile robots [J]. Robotics and Autonomous Systems, 2021, 141: 103774. |
| [1] | Ying HU, Zhihuan CHEN. Trajectory tracking control of wheeled mobile robots under side-slip and slip [J]. Journal of Computer Applications, 2024, 44(7): 2294-2300. |
| [2] | Ming ZHANG, Le FU, Haifeng WANG. Relay control model for concurrent data flow in edge computing [J]. Journal of Computer Applications, 2024, 44(12): 3876-3883. |
| [3] | Xuguang LIU, Changping DU, Yao ZHENG. Trajectory control of quadrotor based on reinforcement learning-iterative learning [J]. Journal of Computer Applications, 2022, 42(12): 3950-3956. |
| [4] | LUO Rui, SHI Wuxi, LI Baoquan. Active disturbance rejection control for mobile robot with skidding and slipping [J]. Journal of Computer Applications, 2018, 38(5): 1517-1522. |
| [5] | WANG Chunrong, XIA Erdong, WU Long, LIU Jianjun, XIONG Changjiong. Localization for mobile robots based on improved support vector regression algorithm [J]. Journal of Computer Applications, 2016, 36(9): 2545-2549. |
| [6] | ZHANG Kun, GAO Xiaoguang. Adaptive tracking control for unmanned aerial vehicle's three dimensional trajectory [J]. Journal of Computer Applications, 2016, 36(9): 2631-2635. |
| [7] | CAI Zhuang ZHANG Guoliang TIAN Qi. Trajectory tracking control of manipulator based on FSMC [J]. Journal of Computer Applications, 2014, 34(1): 232-235. |
| [8] | REN Dongyan SUN Mingtai. Modeling and simulation for route-transition of mine-hunting and mine-sweeping by helicopter [J]. Journal of Computer Applications, 2013, 33(07): 2087-2090. |
| [9] | ZHANG Yang-ming LIU Guo-rong LIU Dong-bo LIU Huan. Trajectory tracking control based on Lyapunov and Terminal sliding mode [J]. Journal of Computer Applications, 2012, 32(11): 3243-3246. |
| [10] | HUANG Yu-chuan QU Dao-kui XU Fang REN Xiao-lei. Model predictive control and PID control on servo motor [J]. Journal of Computer Applications, 2012, 32(10): 2944-2947. |
| [11] | Guo-liang ZHANG Lei AN Wen-jun TANG. Trajectory tracking control of three-wheeled mobile robot [J]. Journal of Computer Applications, 2011, 31(08): 2293-2296. |
| [12] | . Trajectory tracking of mobile robot using iterative learning control in polar coordinates [J]. Journal of Computer Applications, 2010, 30(8): 2017-2020. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||