


Journal of Computer Applications ›› 2025, Vol. 45 ›› Issue (10): 3259-3269.DOI: 10.11772/j.issn.1001-9081.2024101431
• Advanced computing • Previous Articles
Jian SUN1,2, Wei ZHANG1, Baoquan MA1( ), Zhuiwei WU1, Xiaohuan YANG1, Tao WU1
), Zhuiwei WU1, Xiaohuan YANG1, Tao WU1
Received:2024-10-09
Revised:2025-03-06
Accepted:2025-03-10
Online:2025-03-26
Published:2025-10-10
Contact:
Baoquan MA
About author:SUN Jian, born in 1982, Ph. D., associate professor. His research interests include big data storage and management.Supported by:
孙鉴1,2, 张伟1, 马宝全1(), 吴隹伟1, 杨晓焕1, 武涛1
通讯作者:
马宝全
作者简介:孙鉴(1982—),男,山东烟台人,副教授,博士,CCF会员,主要研究方向:大数据存储与管理基金资助:CLC Number:
Jian SUN, Wei ZHANG, Baoquan MA, Zhuiwei WU, Xiaohuan YANG, Tao WU. MATOS: UAV swarm assisted moving-aware adaptive-parallel computing task offloading system[J]. Journal of Computer Applications, 2025, 45(10): 3259-3269.
孙鉴, 张伟, 马宝全, 吴隹伟, 杨晓焕, 武涛. 无人机群辅助的移动感知自适应并行计算任务卸载系统MATOS[J]. 《计算机应用》唯一官方网站, 2025, 45(10): 3259-3269.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2024101431

Fig. 1 Architecture of three-layer mobile edge computing network
| 步骤 | 时间复杂度 |
|---|---|
| 初始化任务参数、任务队列、ABS计算资源 | O(1) |
| 初始化AGACO模型参数、任务种群 | O(1) |
| 初始化信息素矩阵 | O(X2) |
| 路径选择 | O(P·T) |
| 种群排序 | O(P log P) |
| 更新最优路径 | O(P) |
| 更新信息素矩阵 | O(X2) |
| 选择父代个体 | O(P2) |
| 交叉和变异操作 | O(P·T) |
Tab. 1 Complexity analysis of AGACO
| 步骤 | 时间复杂度 |
|---|---|
| 初始化任务参数、任务队列、ABS计算资源 | O(1) |
| 初始化AGACO模型参数、任务种群 | O(1) |
| 初始化信息素矩阵 | O(X2) |
| 路径选择 | O(P·T) |
| 种群排序 | O(P log P) |
| 更新最优路径 | O(P) |
| 更新信息素矩阵 | O(X2) |
| 选择父代个体 | O(P2) |
| 交叉和变异操作 | O(P·T) |
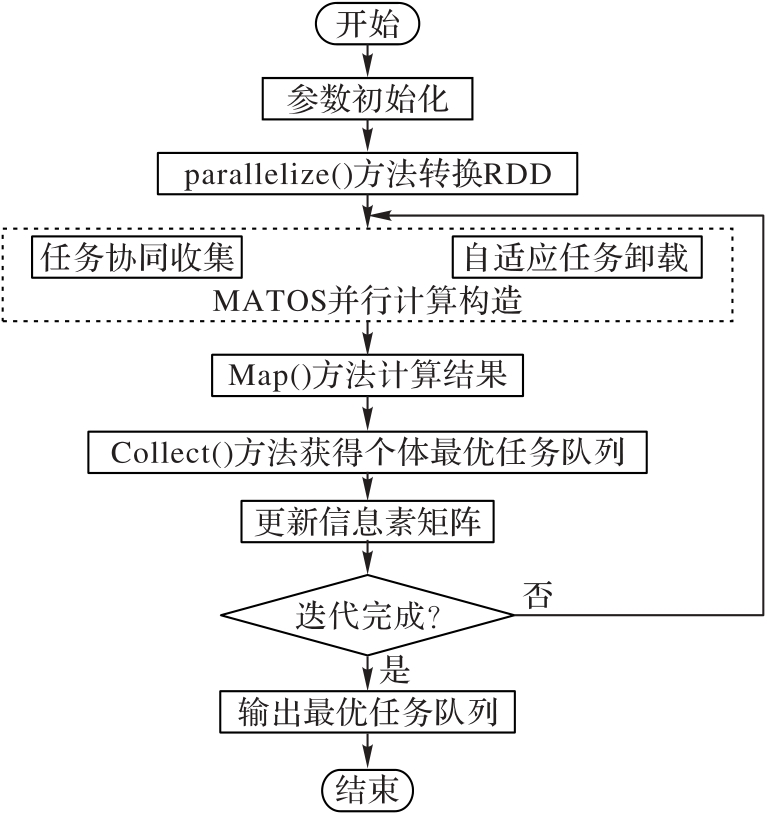
Fig. 2 Flow of MATOS
| 参数 | 描述 | 值 |
|---|---|---|
| M | UAV数 | 6~14 |
| m | 任务数 | 100~500 |
| N | 地面设备数 | 100~600 |
| 任务数据大小 | 1~12 MB | |
| ABS芯片相关系数 | 2*2 GHz | |
| UAV飞行速度 | 1 m/s | |
| UAV无线发射功率 | 0.1 W | |
| UAV运算功率 | 20 W | |
| 空气密度 | 1.225 kg/m3 | |
| R | UAV旋翼半径 | 0.4 m |
| 剖面阻力系数 | 0.012 | |
| 感应功率增量校正因子 | 0.1 | |
| W | UAV重量 | 20 N |
| 旋翼实度 | 0.05 | |
| 机身等效板面积 | 0.002 m2 | |
| e | 机身阻力比 | 0.001 |
| 通信带宽 | 31.24 MHz | |
| LoS的路径损耗 | 1 dB | |
| NLoS的路径损耗 | 9 dB | |
| f | 载波频率 | 5 GHz |
| 短距离极限传输速率 | 100 Mbit/s | |
| 长距离极限传输速率 | 300 Mbit/s | |
| UAV允许接入数 | 1~55 | |
| 计算资源下降因子 | 0.15 | |
| 环境相关系数 | 5 | |
| 环境相关系数 | 0.4 | |
| 服务器空闲状态下的能量消耗比例 | 0.7 |
Tab. 2 MATOS related parameters
| 参数 | 描述 | 值 |
|---|---|---|
| M | UAV数 | 6~14 |
| m | 任务数 | 100~500 |
| N | 地面设备数 | 100~600 |
| 任务数据大小 | 1~12 MB | |
| ABS芯片相关系数 | 2*2 GHz | |
| UAV飞行速度 | 1 m/s | |
| UAV无线发射功率 | 0.1 W | |
| UAV运算功率 | 20 W | |
| 空气密度 | 1.225 kg/m3 | |
| R | UAV旋翼半径 | 0.4 m |
| 剖面阻力系数 | 0.012 | |
| 感应功率增量校正因子 | 0.1 | |
| W | UAV重量 | 20 N |
| 旋翼实度 | 0.05 | |
| 机身等效板面积 | 0.002 m2 | |
| e | 机身阻力比 | 0.001 |
| 通信带宽 | 31.24 MHz | |
| LoS的路径损耗 | 1 dB | |
| NLoS的路径损耗 | 9 dB | |
| f | 载波频率 | 5 GHz |
| 短距离极限传输速率 | 100 Mbit/s | |
| 长距离极限传输速率 | 300 Mbit/s | |
| UAV允许接入数 | 1~55 | |
| 计算资源下降因子 | 0.15 | |
| 环境相关系数 | 5 | |
| 环境相关系数 | 0.4 | |
| 服务器空闲状态下的能量消耗比例 | 0.7 |
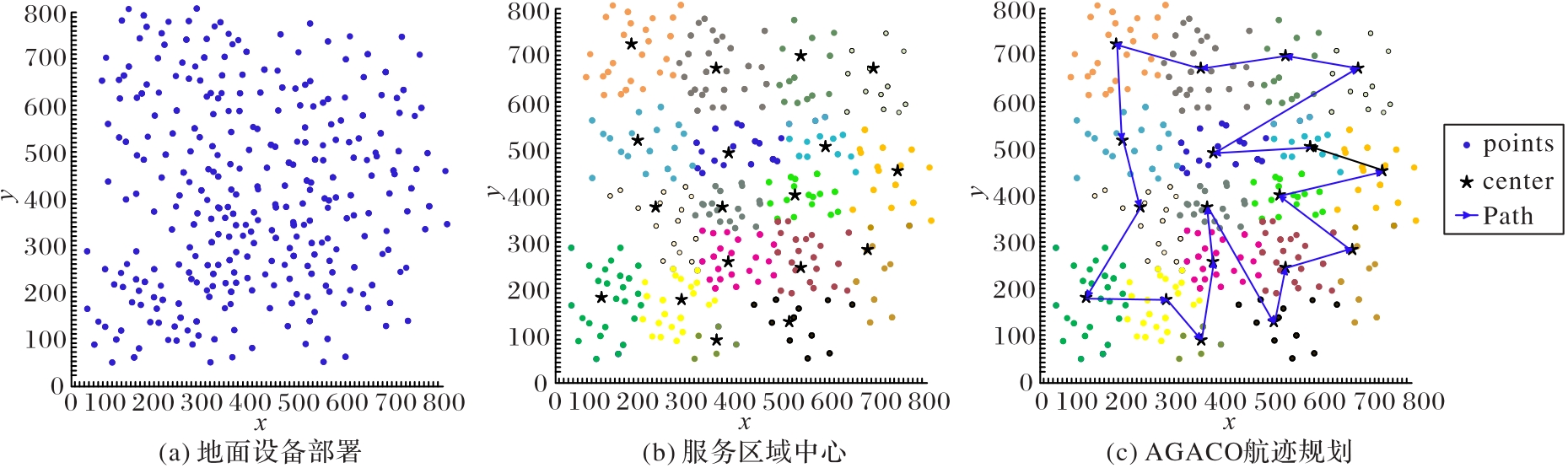
Fig. 3 Service area division and UAV swarm track planning
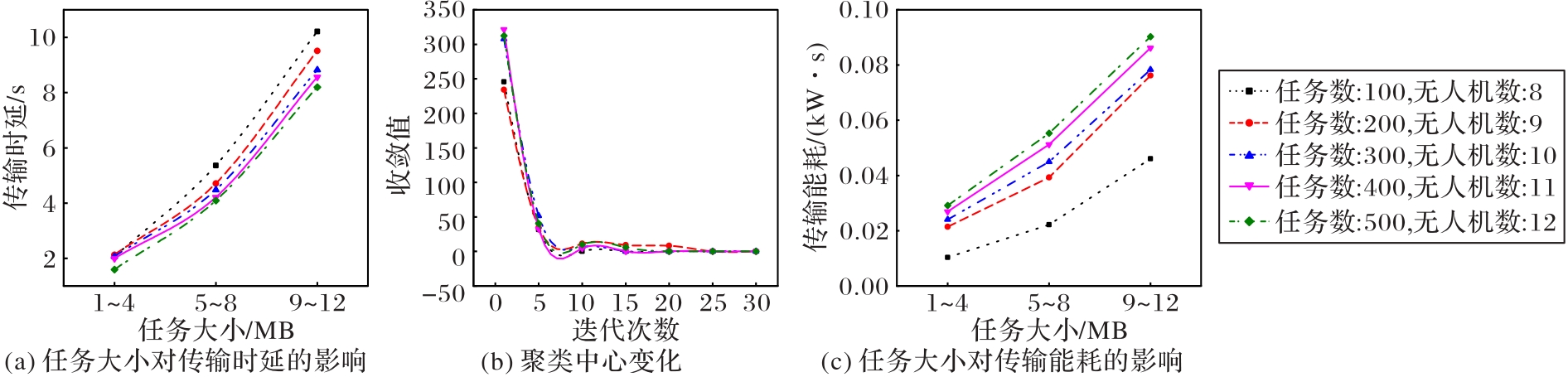
Fig. 4 Impact of different number of tasks and UAVs on collaborative collection mechanism
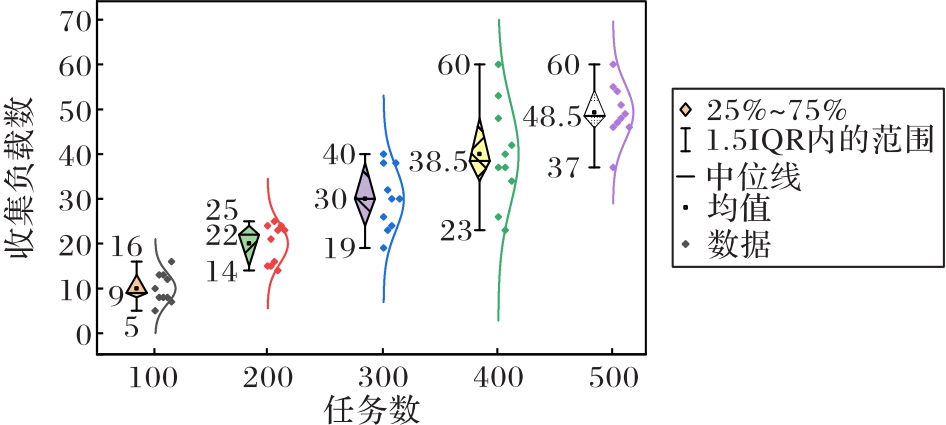
Fig. 5 Changes in number of task collection load among UAVs with number of tasks under ten UAVs
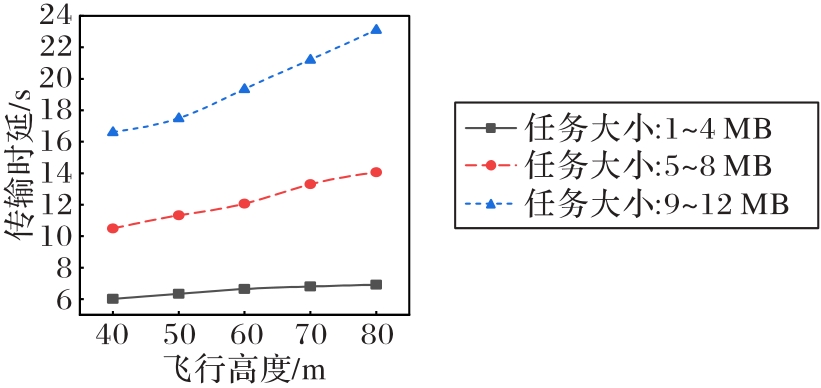
Fig. 6 Impact of UAV flight altitude on transmission latency of tasks of different sizes
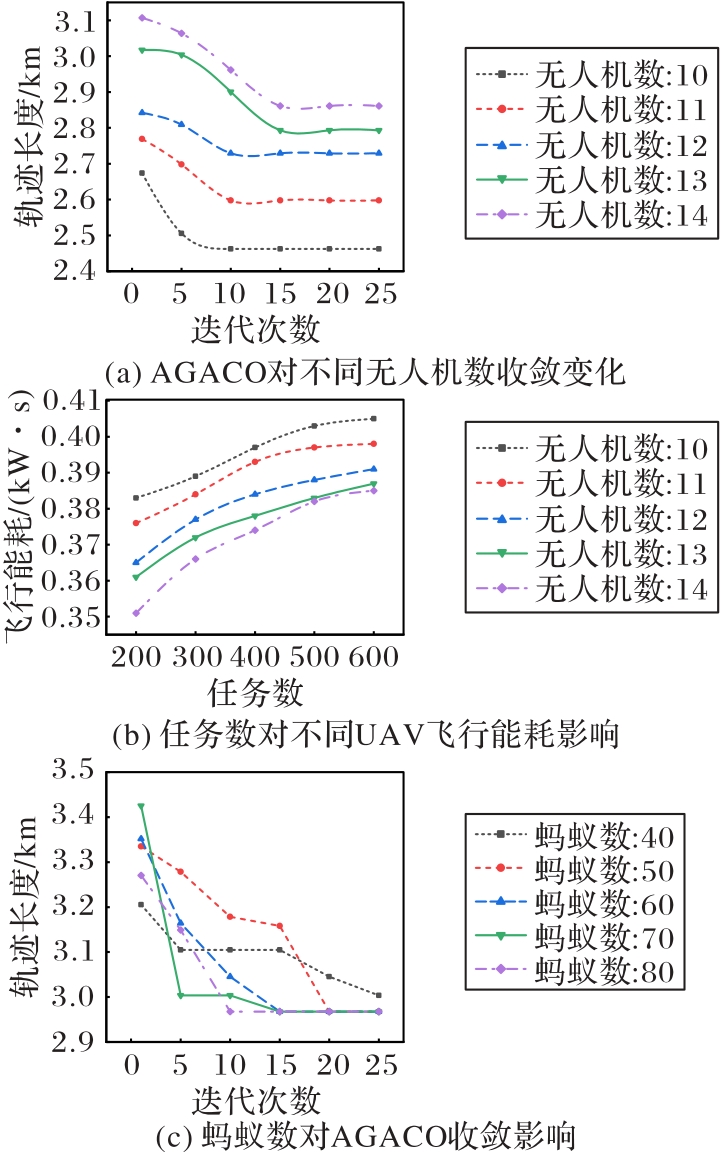
Fig. 7 Schematic diagram of AGACO path planning

Fig. 8 Impact of different population sizes, numbers of task, and UAV quantities on convergence of AGACO
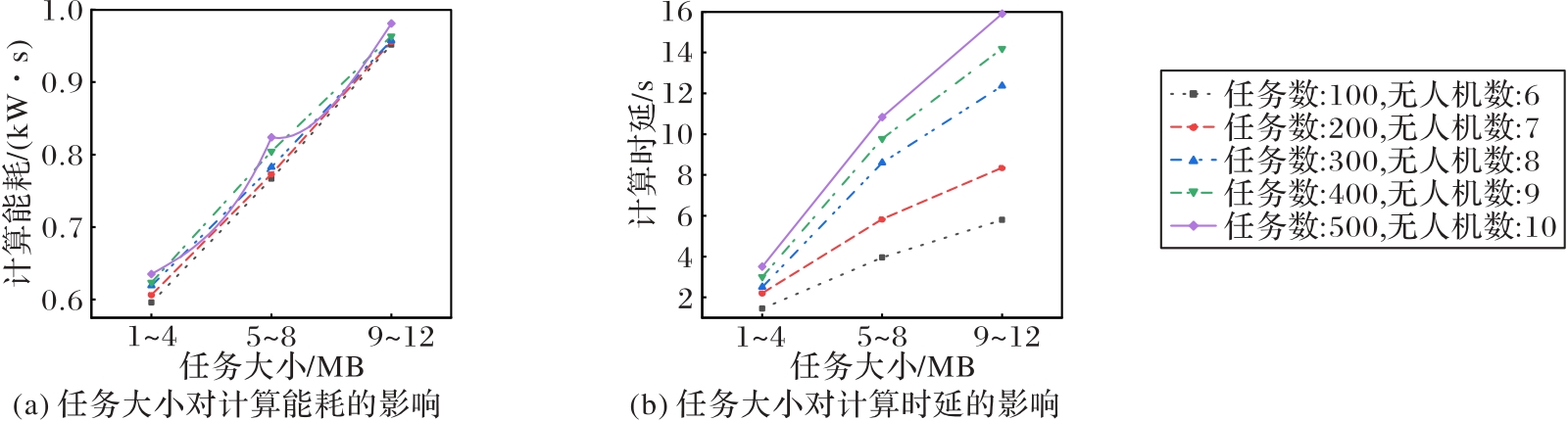
Fig. 9 Impact of task size on computational energy consumption and latency under different numbers of tasks and UAVs
| 系统 | 设计思路 |
|---|---|
| RESERVE[ | 基于局部小型无人机终端、边缘大型无人机服务器与远程云组网方式,设计分散式任务卸载机制与博弈算法进行计算卸载 |
| STMTO[ | 基于无人机群以任务卸载能耗与时延最低收集任务,采用双向多对多任务拍卖机制进行任务卸载,基于用户位置进行UAV swarm航迹规划 |
| UECIN[ | 根据时间、日期等条件预测一定时间段内的地面用户数,进而提前更新无人机数;同时,无人机实时监控剩余能量,能量过低由新无人机替换。允许最大任务卸载时延,以减少无人机使用数 |
| MAOS[ | 基于全局搜索与局部搜索的进化算法,优化UAV swarm飞行路径与任务卸载时延 |
| MOTO[ | 提出移动性感知的任务卸载控制策略,通过长短期记忆优化任务卸载决策,通过D3QN(Dueling Double Deep Q-Network)解决边缘服务器计算负载不均衡的问题 |
Tab. 3 Proposed design ideas of MEC systems
| 系统 | 设计思路 |
|---|---|
| RESERVE[ | 基于局部小型无人机终端、边缘大型无人机服务器与远程云组网方式,设计分散式任务卸载机制与博弈算法进行计算卸载 |
| STMTO[ | 基于无人机群以任务卸载能耗与时延最低收集任务,采用双向多对多任务拍卖机制进行任务卸载,基于用户位置进行UAV swarm航迹规划 |
| UECIN[ | 根据时间、日期等条件预测一定时间段内的地面用户数,进而提前更新无人机数;同时,无人机实时监控剩余能量,能量过低由新无人机替换。允许最大任务卸载时延,以减少无人机使用数 |
| MAOS[ | 基于全局搜索与局部搜索的进化算法,优化UAV swarm飞行路径与任务卸载时延 |
| MOTO[ | 提出移动性感知的任务卸载控制策略,通过长短期记忆优化任务卸载决策,通过D3QN(Dueling Double Deep Q-Network)解决边缘服务器计算负载不均衡的问题 |
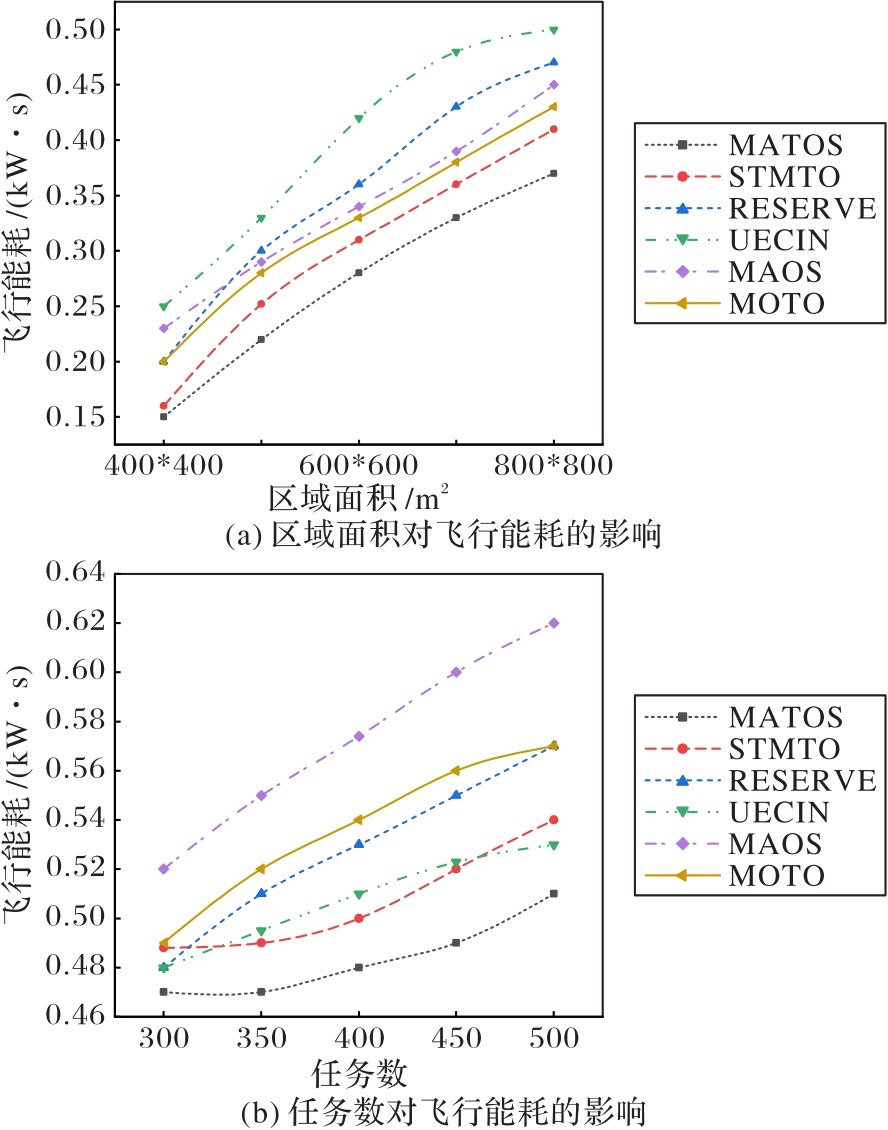
Fig. 10 Comparison of track planning

Fig. 11 Comparison of task offloading latency and success rate
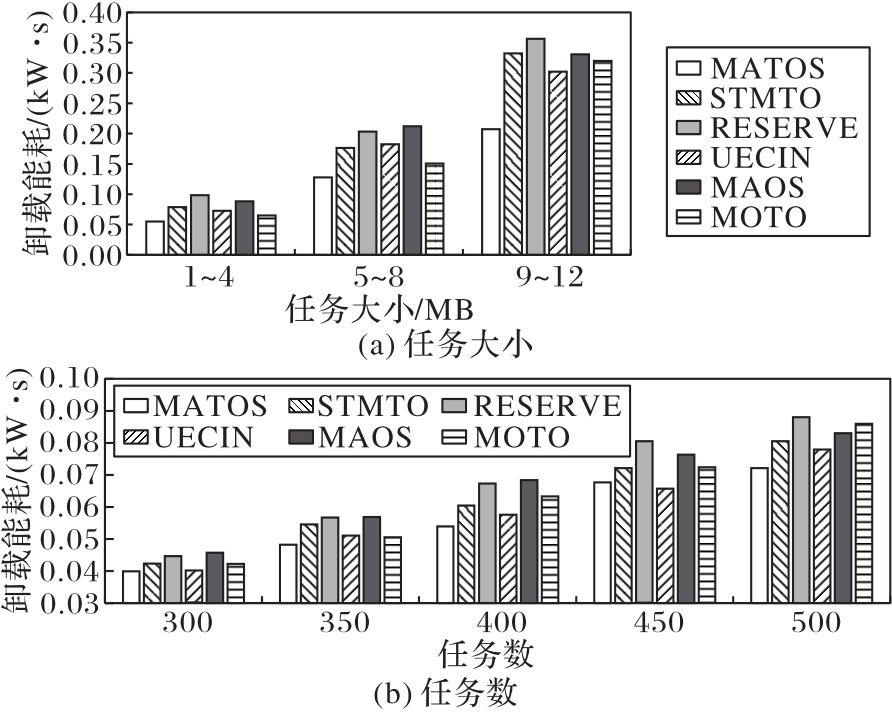
Fig. 12 Comparison of task offloading energy consumption
| [1] | DEESE A S, JESSON J, BRENNAN T, et al. Long-term monitoring of smart city assets via internet of things and low-power wide-area networks[J]. IEEE Internet of Things Journal, 2021, 8(1):222-231. |
| [2] | 国际数据公司. IDC:2024年全球边缘计算投资将达 2 320亿美元[EB/OL]. (2024-06-04) [2024-08-11]. . |
| International Data Corporation. IDC: global edge computing investment will reach 232 billion dollars in 2024[EB/OL]. (2024-06-04) [2024-08-11]. . | |
| [3] | CHOUIKHI S, ESSEGHIR M, MERGHEM-BOULAHIA L. Computation offloading for industrial internet of things: a cooperative approach[C]// Proceedings of the 2023 International Conference on Wireless Communications and Mobile Computing. Piscataway: IEEE, 2023: 626-631. |
| [4] | QIN Z, HE S, WANG H, et al. Air-ground collaborative mobile edge computing: architecture, challenges, and opportunities[J]. China Communications, 2024, 21(5):1-16. |
| [5] | DENG T, WANG Y, LI J, et al. Entropy normalization SAC-based task offloading for UAV-assisted mobile edge computing[J]. IEEE Internet of Things Journal, 2024, 11(15):26220-26233. |
| [6] | LIU Z, CAO Y, GAO P, et al. Multi-UAV network assisted intelligent edge computing: challenges and opportunities[J]. China Communications, 2022, 19(3): 258-278. |
| [7] | OUYANG Y, LIU A, XIONG N, et al. An effective early message ahead join adaptive data aggregation scheme for sustainable IoT[J]. IEEE Transactions on Network Science and Engineering, 2021, 8(1): 201-219. |
| [8] | ZHANG L, WEN F, ZHANG Q, et al. Constrained multiobjective decomposition evolutionary algorithm for UAVs-assisted mobile edge computing networks[J]. IEEE Internet of Things Journal, 2024, 11(22):36673-36687. |
| [9] | YANG X, ZENG Z, LIU A, et al. A decentralized trust inference approach with intelligence to improve data collection quality for mobile crowd sensing[J]. Information Sciences, 2023, 644: No.119286. |
| [10] | PENG K, YANG Y, WANG S, et al. Reliability-aware proactive offloading in mobile edge computing using Stackelberg game approach[J]. IEEE Internet of Things Journal, 2024, 11(9):16660-16671. |
| [11] | XIANG B, ZHONG B, WANG A, et al. Edge computing collaborative offloading strategy for space-air-ground integrated networks[J]. Concurrency and Computation: Practice and Experience, 2024, 26(21): No.e8214. |
| [12] | DU J, WANG J, SUN A, et al. Joint optimization in blockchain- and MEC-enabled space-air-ground integrated networks[J]. IEEE Internet of Things Journal, 2024, 11(19):31862-31877. |
| [13] | QIU Q, LI L, XIAO Z, et al. Joint UAV deployment and task offloading in large-scale UAV-assisted MEC: a multiobjective evolutionary algorithm[J]. Mathematics, 2024, 12(13): No.1966. |
| [14] | ZHANG Y, HOU X, DU H, et al. Joint trajectory and resource optimization for UAV and D2D-enabled heterogeneous edge computing networks[J]. IEEE Transactions on Vehicular Technology, 2024, 73(9):13816-13827. |
| [15] | SUN L, LIU Z, NING Z, et al. Multi-agent Q-net enhanced coevolutionary algorithm for resource allocation in emergency human-machine fusion UAV-MEC system[J]. IEEE Transactions on Automation Science and Engineering, 2025, 22: 4473-4489. |
| [16] | QIN H, ZHENG Q, MEMMI G, et al. Deep residual learning-based enhanced JPEG compression in the internet of things[J]. IEEE Transactions on Industrial Informatics, 2021, 17(3): 2124-2133. |
| [17] | RAHIM S, PENG L. Intelligent space-air-ground collaborative computing networks[J]. IEEE Internet of Things Magazine, 2023, 6(2):76-80. |
| [18] | CHEN B, ZHOU H, YAO J, et al. RESERVE: an energy-efficient edge cloud architecture for intelligent multi-UAV[J]. IEEE Transactions on Services Computing, 2022, 15(2): 819-832. |
| [19] | GUO J, HUANG G, LI Q, et al. STMTO: a smart and trust multi-UAV task offloading system[J]. Information Sciences, 2021, 573: 519-540. |
| [20] | GUO J, LIU A, OTA K, et al. ITCN: an intelligent trust collaboration network system in IoT[J]. IEEE Transactions on Network Science and Engineering, 2022, 9(1):203-218. |
| [21] | ADIL M, JAN M A, LIU Y, et al. A systematic survey: security threats to UAV-aided IoT applications, taxonomy, current challenges and requirements with future research directions[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(2): 1437-1455. |
| [22] | WANG Y, ZHU J, HUANG H, et al. Bi-objective ant colony optimization for trajectory planning and task offloading in UAV-assisted MEC systems[J]. IEEE Transactions on Mobile Computing, 2024, 23(12):12360-12377. |
| [23] | GUO H, ZHOU X, WANG Y, et al. Achieve load balancing in multi-UAV edge computing IoT networks: a dynamic entry and exit mechanism[J]. IEEE Internet of Things Journal, 2022, 9(19): 18725-18736. |
| [24] | SEID A M, BOATENG GO, MARERI B, et al. Multi-agent DRL for task offloading and resource allocation in multi-UAV enabled IoT edge network[J]. IEEE Transactions on Network and Service Management, 2021, 18(4): 4531-4547. |
| [25] | SHUAI J, CUI H, HE Y, et al. Dynamic satellite edge computing offloading algorithm based on distributed deep learning[J]. IEEE Internet of Things Journal, 2024, 11(16):27790-27802. |
| [26] | 刘红伟,潘灵,吴明钦,等. 一种FPGA集群轻量级深度学习计算架构设计及实现[J]. 电讯技术, 2024, 64(1):14-21. |
| LIU H W, PAN L, WU M Q, et al. Design and implementation of a lightweight deep learning computing architecture for FPGA cluster[J]. Telecommunication Engineering, 2024, 64(1):14-21. | |
| [27] | ZAFAR S, JANGSHER S, ZAFAR A. Federated learning for resource allocation in vehicular edge computing-enabled moving small cell networks[J]. Vehicular Communications, 2024, 45: No.100695. |
| [28] | LIU Q, ZHANG H, ZHANG X, et al. Improved DDPG based two-timescale multi-dimensional resource allocation for multi-access edge computing networks[J]. IEEE Transactions on Vehicular Technology, 2024, 73(6):9153-9158. |
| [29] | SHARMA S, BALI R S. An edge computing framework for data analysis in intelligent transportation systems[C]// Proceedings of the 3rd International Conference for Innovation in Technology. Piscataway: IEEE, 2024: 1-6. |
| [30] | YAHYA M, CONZELMANN A, MAGHSUDI S. Decentralized task offloading and load-balancing for mobile edge computing in dense networks[J]. IEEE Communications Letters, 2024, 28(8): 1954-1958. |
| [31] | WU P, XIAO F, HUANG H, et al. Load balance and trajectory design in multi-UAV aided large-scale wireless rechargeable networks[J]. IEEE Transactions on Vehicular Technology, 2020, 69(11): 13756-13767. |
| [32] | DUAN S, LYU F, WU H, et al. MOTO: mobility-aware online task offloading with adaptive load balancing in small-cell MEC[J]. IEEE Transactions on Mobile Computing, 2024, 23(1): 645-659. |
| [1] | Tianyu XUE, Aiping LI, Liguo DUAN. Vehicular edge computing scheme with task offloading and resource optimization [J]. Journal of Computer Applications, 2025, 45(6): 1766-1775. |
| [2] | Yufei XIANG, Zhengwei NI. Edge federation dynamic analysis for hierarchical federated learning based on evolutionary game [J]. Journal of Computer Applications, 2025, 45(4): 1077-1085. |
| [3] | Junna ZHANG, Xinxin WANG, Tianze LI, Xiaoyan ZHAO, Peiyan YUAN. Task offloading method based on dynamic service cache assistance [J]. Journal of Computer Applications, 2024, 44(5): 1493-1500. |
| [4] | Xiaoyan ZHAO, Wei HAN, Junna ZHANG, Peiyan YUAN. Collaborative offloading strategy in internet of vehicles based on asynchronous deep reinforcement learning [J]. Journal of Computer Applications, 2024, 44(5): 1501-1510. |
| [5] | Ming ZHANG, Le FU, Haifeng WANG. Relay control model for concurrent data flow in edge computing [J]. Journal of Computer Applications, 2024, 44(12): 3876-3883. |
| [6] | Xiaolin LI, Yusang JIANG. Task offloading algorithm for UAV-assisted mobile edge computing [J]. Journal of Computer Applications, 2023, 43(6): 1893-1899. |
| [7] | Yanan SUN, Jiehong WU, Junling SHI, Lijun GAO. Multi-UAV collaborative task assignment method based on improved self-organizing map [J]. Journal of Computer Applications, 2023, 43(5): 1551-1556. |
| [8] | Yunbo LONG, Dan TANG. Load balancing method based on local repair code in distributed storage [J]. Journal of Computer Applications, 2023, 43(3): 767-775. |
| [9] | Li YANG, Jianting CHEN, Yang XIANG. Performance optimization strategy of distributed storage for industrial time series big data based on HBase [J]. Journal of Computer Applications, 2023, 43(3): 759-766. |
| [10] | Jieqin WANG, Shihyang LIN, Shiming PENG, Shuo JIA, Miaohui YANG. Hierarchical resource allocation mechanism of cooperative mobile edge computing [J]. Journal of Computer Applications, 2022, 42(8): 2501-2510. |
| [11] | Yanpei LIU, Ningning CHEN, Yunjing ZHU, Liping WANG. Review of mobile edge caching optimization technologies for 5G/Beyond 5G [J]. Journal of Computer Applications, 2022, 42(8): 2487-2500. |
| [12] | Shiquan DENG, Xuguo YE. Multi-objective task offloading algorithm based on deep Q-network [J]. Journal of Computer Applications, 2022, 42(6): 1668-1674. |
| [13] | Jingling YUAN, Huihua MAO, Nana WANG, Yao XIANG. Dynamic service deployment strategy in resource constrained mobile edge computing [J]. Journal of Computer Applications, 2022, 42(6): 1662-1667. |
| [14] | Yu LI, Xiping HE, Lianggui TANG. Multi-user computation offloading and resource optimization policy based on device-to-device communication [J]. Journal of Computer Applications, 2022, 42(5): 1538-1546. |
| [15] | Xuling ZENG, Taoshen LI, Jian GONG, Lijun DU. Secure offloading optimization of wireless powered mobile edge computing system [J]. Journal of Computer Applications, 2022, 42(4): 1216-1224. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||