


Journal of Computer Applications ›› 2022, Vol. 42 ›› Issue (8): 2637-2642.DOI: 10.11772/j.issn.1001-9081.2021060975
• Frontier and comprehensive applications • Previous Articles
Bao CHEN, Zupeng ZHOU( ), Huan WEI, Yanzhao LYU, Zhicheng SUI
), Huan WEI, Yanzhao LYU, Zhicheng SUI
Received:2021-06-09
Revised:2021-08-05
Accepted:2021-08-17
Online:2022-08-09
Published:2022-08-10
Contact:
Zupeng ZHOU
About author:CHEN Bao, born in 1997, M. S. candidate. His research interests include control of unmanned aerial vehicle with manipulator, unmanned aerial vehicle collaboration.Supported by:
陈宝, 周祖鹏(), 卫欢, 吕延钊, 睢志成
通讯作者:
周祖鹏
作者简介:陈宝(1997—),男,海南乐东人,硕士研究生,主要研究方向:带机械臂无人机控制、无人机协同;基金资助:CLC Number:
Bao CHEN, Zupeng ZHOU, Huan WEI, Yanzhao LYU, Zhicheng SUI. Control method of quadrotor UAV with manipulator based on expert PID[J]. Journal of Computer Applications, 2022, 42(8): 2637-2642.
陈宝, 周祖鹏, 卫欢, 吕延钊, 睢志成. 基于专家PID的带臂四旋翼无人机控制方法[J]. 《计算机应用》唯一官方网站, 2022, 42(8): 2637-2642.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2021060975

Fig. 1 System of quadrotor UAV with manipulator
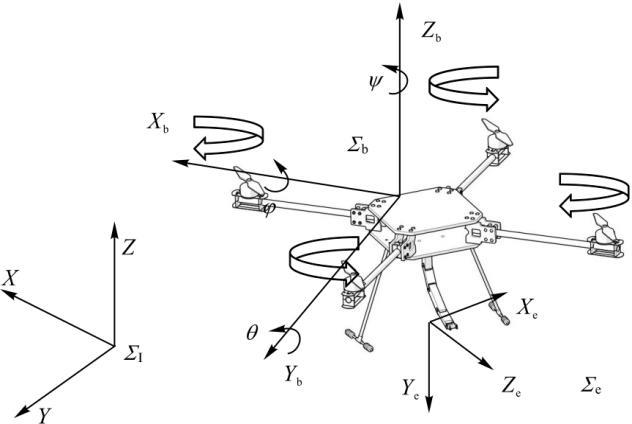
Fig. 2 Coordinate system model of UAV with manipulator
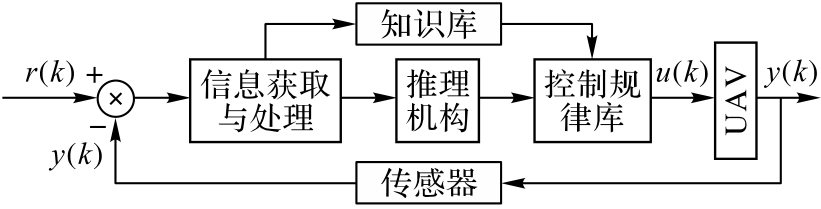
Fig. 3 Structure of control system of UAV with manipulator
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| 0.024 kg·m2 | 0.25 | ||
| 0.024 kg·m2 | 0.5 | ||
| 0.045 9 kg·m2 | 0.800 kg | ||
| 1.2 kg | 0.050 kg | ||
| 0.20 m | |||
| 7.5 | 0.10 m |
Tab. 1 Simulation parameters of quadrotor UAV system with manipulator
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| 0.024 kg·m2 | 0.25 | ||
| 0.024 kg·m2 | 0.5 | ||
| 0.045 9 kg·m2 | 0.800 kg | ||
| 1.2 kg | 0.050 kg | ||
| 0.20 m | |||
| 7.5 | 0.10 m |
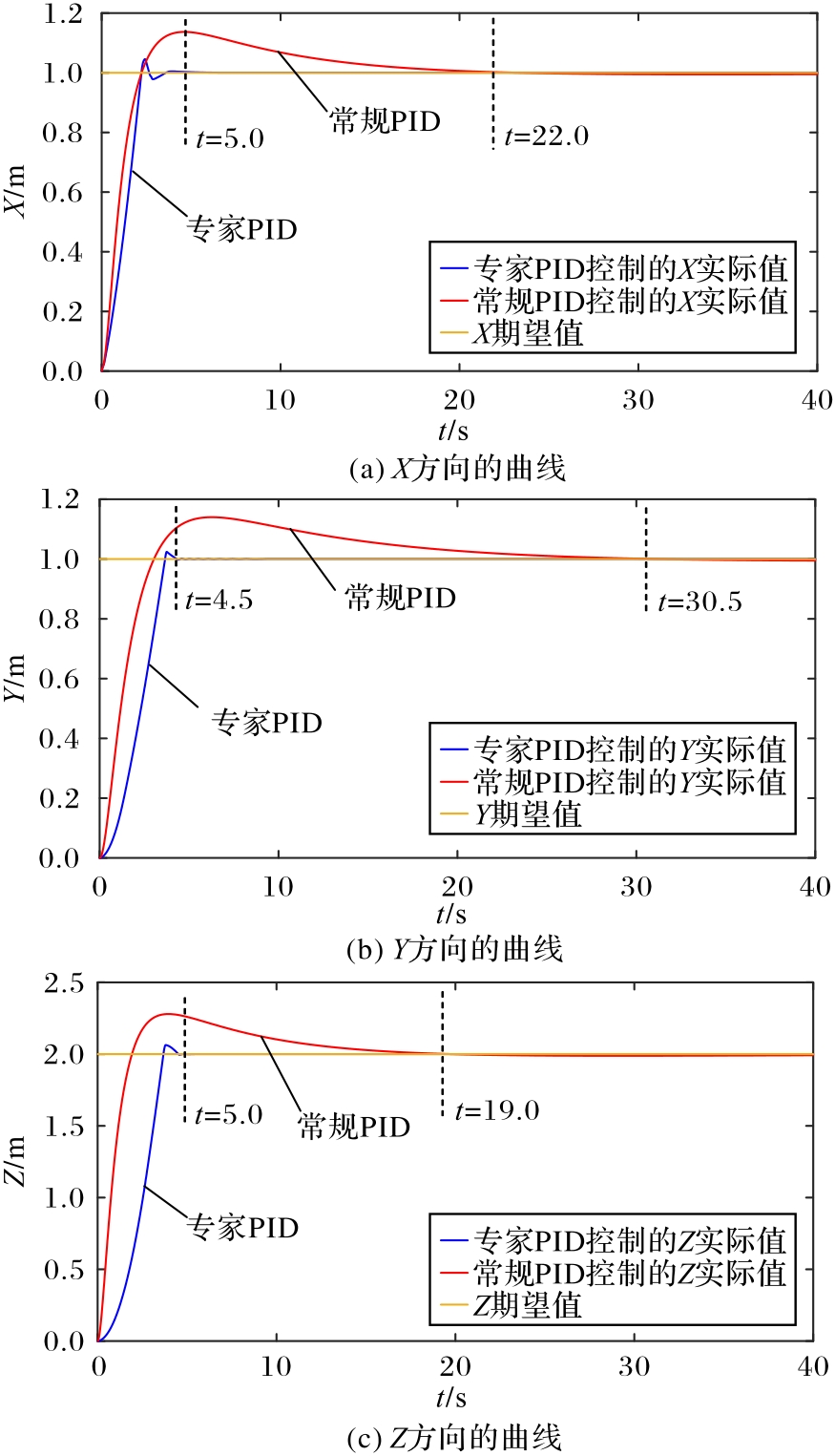
Fig. 4 Curve comparison of position
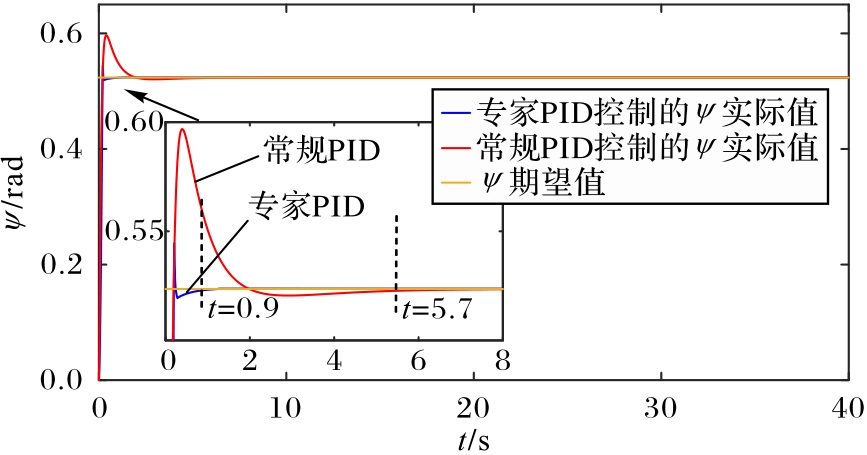
Fig. 5 Curve comparison of yaw angle ψ
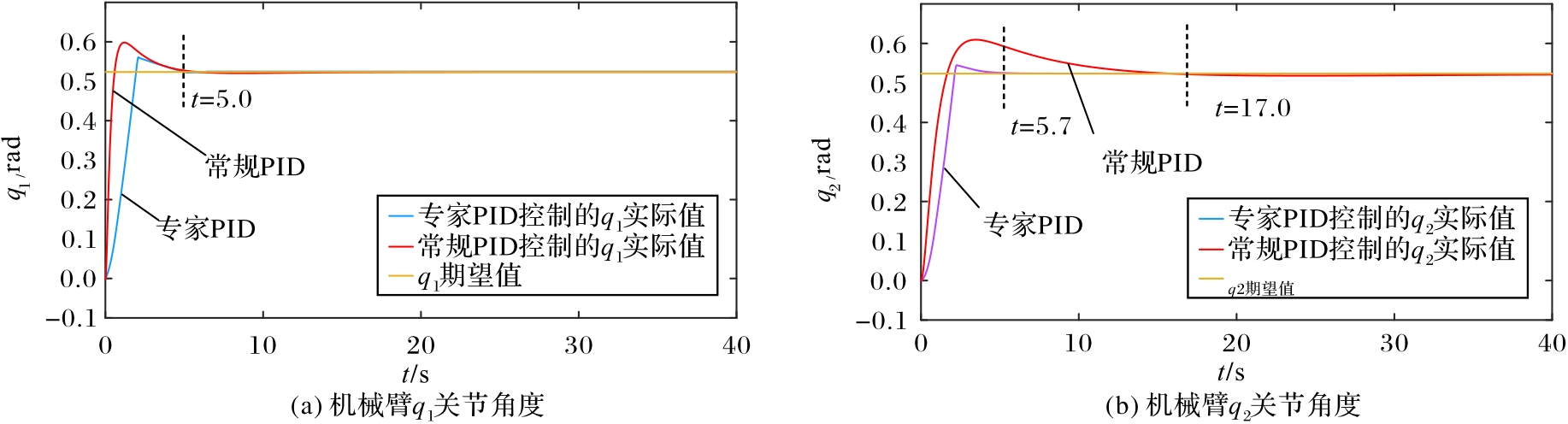
Fig. 6 Curve comparison of joint angles of manipulator
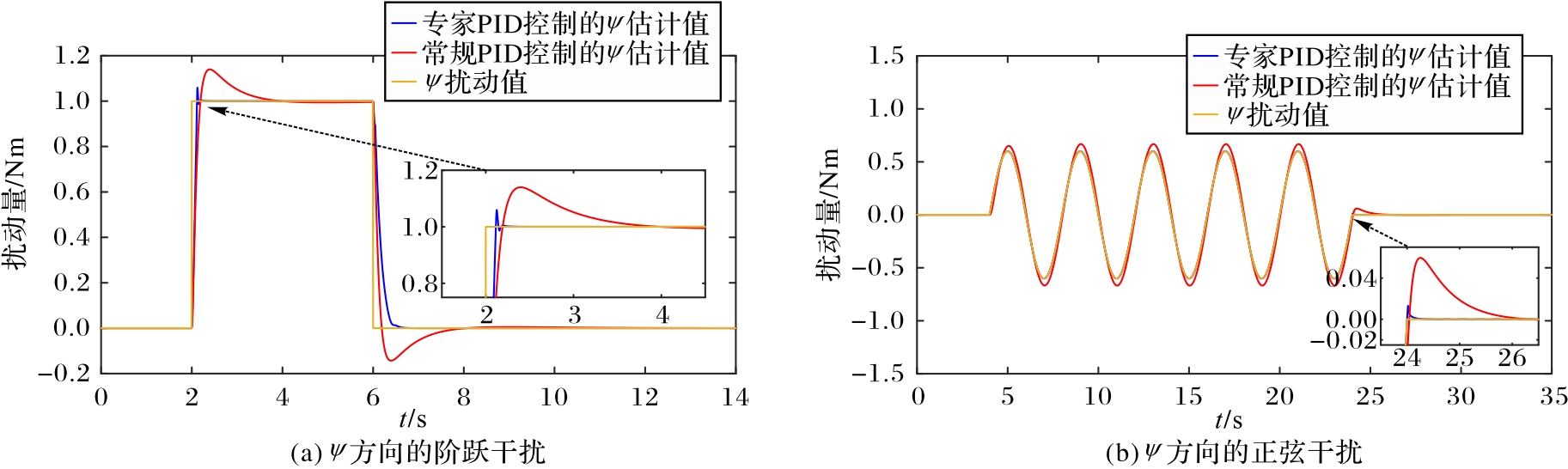
Fig. 7 Curve comparison of external interference
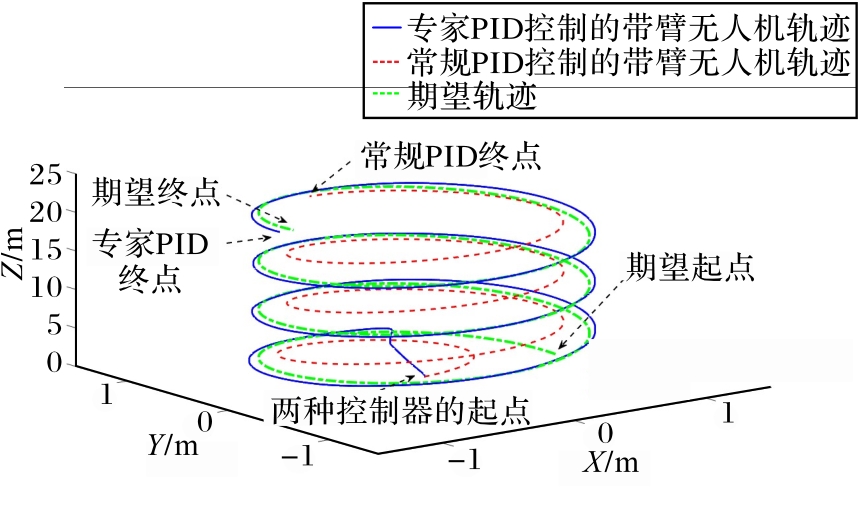
Fig. 8 Comparison of trajectory curves of UAV with manipulator
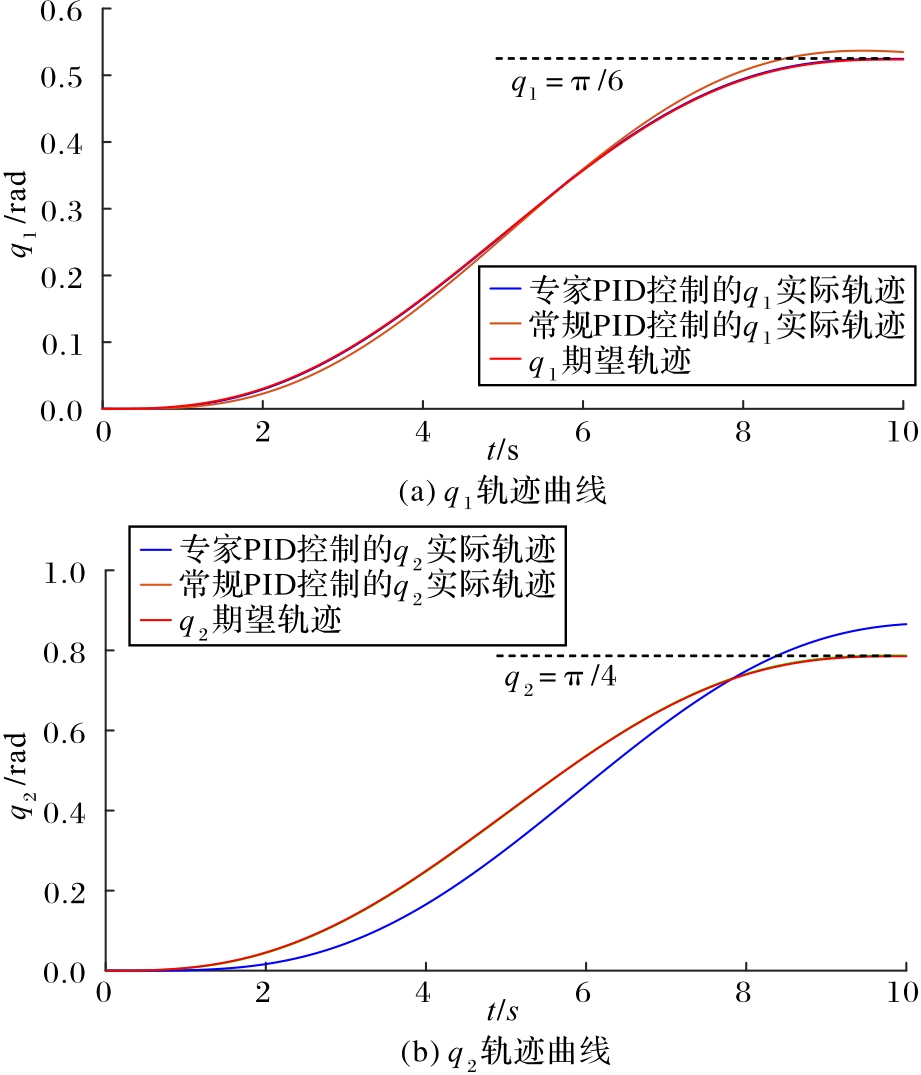
Fig. 9 Curve comparison of manipulator angle trajectories
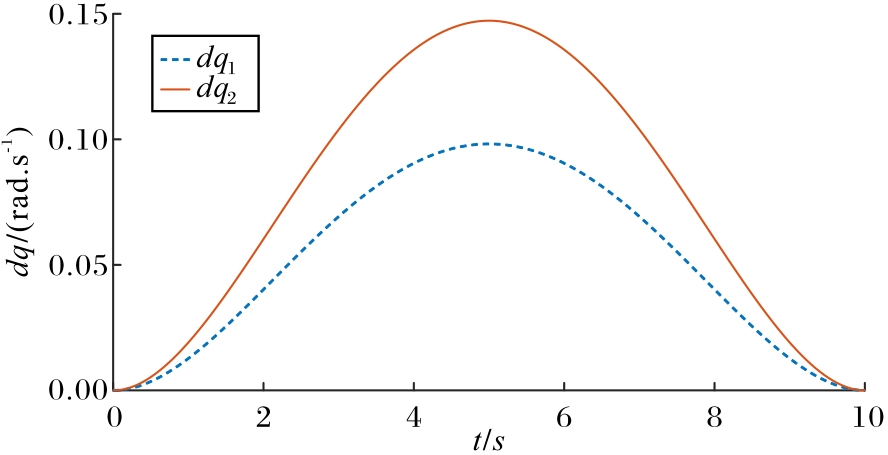
Fig. 10 Manipulator angular velocity
| 1 | LI H M, WANG B H, LIU L, et al. The design and application of SmartCopter: an unmanned helicopter based robot for transmission line inspection [C]// Proceedings of the 2013 Chinese Automation Congress. Piscataway: IEEE, 2013: 697-702. 10.1109/cac.2013.6775824 |
| 2 | KIM S J, LEE D Y, JUNG G P, et al. An origami-inspired, self-locking robotic arm that can be folded flat[J]. Science Robotics, 2018, 3(16): No.eaar2915. 10.1126/scirobotics.aar2915 |
| 3 | KORPELA C M, DANKO T W, OH P Y. MM-UAV: mobile manipulating unmanned aerial vehicle[J]. Journal of Intelligent and Robotic Systems, 2012, 65(1/2/3/4): 93-101. 10.1007/s10846-011-9591-3 |
| 4 | KUTIA J R, STOL K A, XU W L. Initial flight experiments of a canopy sampling aerial manipulator [C]// Proceedings of the 2016 International Conference on Unmanned Aircraft Systems. Piscataway: IEEE, 2016: 1359-1365. 10.1109/icuas.2016.7502616 |
| 5 | BARTELDS T, CAPRA A, HAMAZA S, et al. Compliant aerial manipulators: toward a new generation of aerial robotic workers[J]. IEEE Robotics and Automation Letters, 2016, 1(1): 477-483. 10.1109/lra.2016.2519948 |
| 6 | KAMEL M, ALEXIS K, SIEGWART R. Design and modeling of dexterous aerial manipulator [C]// Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2016: 4870-4876. 10.1109/iros.2016.7759715 |
| 7 | HUBER F, KONDAK K, KRIEGER K, et al. First analysis and experiments in aerial manipulation using fully actuated redundant robot arm [C]// Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2013: 3452-3457. 10.1109/iros.2013.6696848 |
| 8 | THOMAS J, LOIANNO G, POLIN J, et al. Toward autonomous avian-inspired grasping for micro aerial vehicles[J]. Bioinspiration and Biomimetics, 2014, 9(2): No.025010. 10.1088/1748-3182/9/2/025010 |
| 9 | KLAUSEN K, FOSSEN T I, JOHANSEN T A. Nonlinear control with swing damping of a multirotor UAV with suspended load[J]. Journal of Intelligent and Robotic Systems, 2017, 88(2/3/4): 379-394. 10.1007/s10846-017-0509-6 |
| 10 | YANG B, HE Y Q, HAN J D, et al. Modeling and control of rotor-flying multi-joint manipulator[J]. IFAC Proceedings Volumes, 2014, 47(3): 11024-11029. 10.3182/20140824-6-za-1003.00400 |
| 11 | ORSAG M, KORPELA C M, BOGDAN S, et al. Hybrid adaptive control for aerial manipulation[J]. Journal of Intelligent and Robotic Systems, 2014, 73(1/2/3/4): 693-707. 10.1007/s10846-013-9936-1 |
| 12 | BAZYLEV D, KREMLEV A, MARGUN A, et al. Design of control system for a four-rotor UAV equipped with robotic arm [C]// Proceedings of the 7th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops. Piscataway: IEEE, 2015: 144-149. 10.1109/icumt.2015.7382419 |
| 13 | SHARIFI M, SAYYAADI H. Nonlinear robust adaptive Cartesian impedance control of UAVs equipped with a robot manipulator[J]. Advanced Robotics, 2015, 29(3): 171-186. 10.1080/01691864.2014.1002529 |
| 14 | GARIMELLA G, KOBILAROV M. Towards model-predictive control for aerial pick-and-place [C]// Proceedings of the 2015 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2015: 4692-4697. 10.1109/icra.2015.7139850 |
| 15 | YOSHIDA K, NAKANISHI H, UENO H, et al. Dynamics, control and impedance matching for robotic capture of a non-cooperative satellite[J]. Advanced Robotics, 2004, 18(2): 175-198. 10.1163/156855304322758015 |
| 16 | ARLEO G, CACCAVALE F, MUSCIO G, et al. Control of quadrotor aerial vehicles equipped with a robotic arm [C]// Proceedings of the 21st Mediterranean Conference on Control and Automation. Piscataway: IEEE, 2013: 1174-1180. 10.1109/med.2013.6608869 |
| 17 | 梁斌,徐文福.空间机器人:建模、规划与控制[M].北京:清华大学出版社, 2017: 125-135. |
| LIANG B, XU W F. Space Robotics: Modeling, Planning and Control[M]. Beijing: Tsinghua University Press, 2017: 125-135. | |
| 18 | 刘金琨.先进PID控制Matlab仿真[M]. 4版.北京:电子工业出版社, 2016: 307-308. |
| LIU J K. Matlab Simulation of Advanced PID Control[M]. 4th ed. Beijing: Publishing House of Electronics Industry, 2016: 307-308. | |
| 19 | 全权.多旋翼飞行器设计与控制[M].杜光勋,赵峙尧,戴训华,等,译.北京:电子工业出版社, 2018: 65-124. |
| QUAN Q. Introduction to Multirotor Aircraft Design and Control[M]. DU G X, ZHAO Z Y, DAI X H, et al. translated. Beijing: Publishing House of Electronics Industry, 2018: 65-124. |
| [1] | Lingxia MU, Zhengjun ZHOU, Ban WANG, Youmin ZHANG, Xianghong XUE, Kaikai NING. Formation obstacle-avoidance and reconfiguration method for multiple UAVs [J]. Journal of Computer Applications, 2024, 44(9): 2938-2946. |
| [2] | Min HUA, Jia’nan WEI, Wei ZHAO, Shuo MENG. Interference analysis and performance research of LoRa signals [J]. Journal of Computer Applications, 2024, 44(9): 2848-2854. |
| [3] | Chuanlin PANG, Rui TANG, Ruizhi ZHANG, Chuan LIU, Jia LIU, Shibo YUE. Distributed power allocation algorithm based on graph convolutional network for D2D communication systems [J]. Journal of Computer Applications, 2024, 44(9): 2855-2862. |
| [4] | Chao GE, Jiabin ZHANG, Lei WANG, Zhixin LUN. Trajectory planning for autonomous vehicles based on model predictive control [J]. Journal of Computer Applications, 2024, 44(6): 1959-1964. |
| [5] | Zhiqiang ZHENG, Haibin DUAN. Short-range UAV air combat maneuver decision-making via finite tolerance pigeon-inspired optimization [J]. Journal of Computer Applications, 2024, 44(5): 1401-1407. |
| [6] | Tianyu HUANG, Yuanxing LI, Hao CHEN, Zijia GUO, Mingjun WEI. User cluster partitioning method based on weighted fuzzy clustering in ground-air collaboration scenarios [J]. Journal of Computer Applications, 2024, 44(5): 1555-1561. |
| [7] | Huahua WANG, Xu ZHANG, Feng LI. Secondary signal detection algorithm for high-speed mobile environments [J]. Journal of Computer Applications, 2024, 44(4): 1236-1241. |
| [8] | Rui TANG, Shibo YUE, Ruizhi ZHANG, Chuan LIU, Chuanlin PANG. Energy efficiency optimization mechanism for UAV-assisted and non-orthogonal multiple access-enabled data collection system [J]. Journal of Computer Applications, 2024, 44(4): 1209-1218. |
| [9] | Meiyu CAI, Runzhe ZHU, Fei WU, Kaiyu ZHANG, Jiale LI. Cross-view matching model based on attention mechanism and multi-granularity feature fusion [J]. Journal of Computer Applications, 2024, 44(3): 901-908. |
| [10] | Huzhen GAO, Changping DU, Yao ZHENG. Gimbal system control algorithm of unmanned aerial vehicle based on extended state observer [J]. Journal of Computer Applications, 2024, 44(2): 604-610. |
| [11] | Peng PENG, Zhiwei NI, Xuhui ZHU, Qian CHEN. Interference trajectory publication based on improved glowworm swarm algorithm and differential privacy [J]. Journal of Computer Applications, 2024, 44(2): 496-503. |
| [12] | Feng QIAO, Runhe QIU. Throughput optimization algorithm of full-duplex two-way relay network with non-linear energy harvesting and residual hardware impairments [J]. Journal of Computer Applications, 2024, 44(12): 3884-3892. |
| [13] | Lin WANG, Jingliang LIU, Wuwei WANG. Small target detection method in UAV images based on fusion of dilated convolution and Transformer [J]. Journal of Computer Applications, 2024, 44(11): 3595-3602. |
| [14] | Jian SUN, Baoquan MA, Zhuiwei WU, Xiaohuan YANG, Tao WU, Pan CHEN. Joint optimization of UAV swarm path planning and task allocation balance in earthquake scenarios [J]. Journal of Computer Applications, 2024, 44(10): 3232-3239. |
| [15] | Zhongyuan ZHANG, Wei DAI, Guangyu LI, Xiaoqing CHEN, Qibo DENG. Cooperative obstacle avoidance algorithm based on improved artificial potential field and consensus protocol [J]. Journal of Computer Applications, 2023, 43(8): 2644-2650. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||