


Journal of Computer Applications ›› 2025, Vol. 45 ›› Issue (7): 2342-2350.DOI: 10.11772/j.issn.1001-9081.2024070946
• Multimedia computing and computer simulation • Previous Articles Next Articles
Bogan FAN, Shuqing WANG( ), Kaiyuan CHEN
), Kaiyuan CHEN
Received:2024-07-08
Revised:2024-10-11
Accepted:2024-10-11
Online:2025-07-10
Published:2025-07-10
Contact:
Shuqing WANG
About author:FAN Bogan, born in 2001, M. S. candidate. His research interests include target detection, image processing.Supported by:
范博淦, 王淑青(), 陈开元
通讯作者:
王淑青
作者简介:范博淦(2001—),男,安徽六安人,硕士研究生,CCF学生会员,主要研究方向:目标检测、图像处理基金资助:CLC Number:
Bogan FAN, Shuqing WANG, Kaiyuan CHEN. Small target detection model for UAV aerial photography based on improved YOLOv8[J]. Journal of Computer Applications, 2025, 45(7): 2342-2350.
范博淦, 王淑青, 陈开元. 基于改进YOLOv8的航拍无人机小目标检测模型[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2342-2350.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2024070946
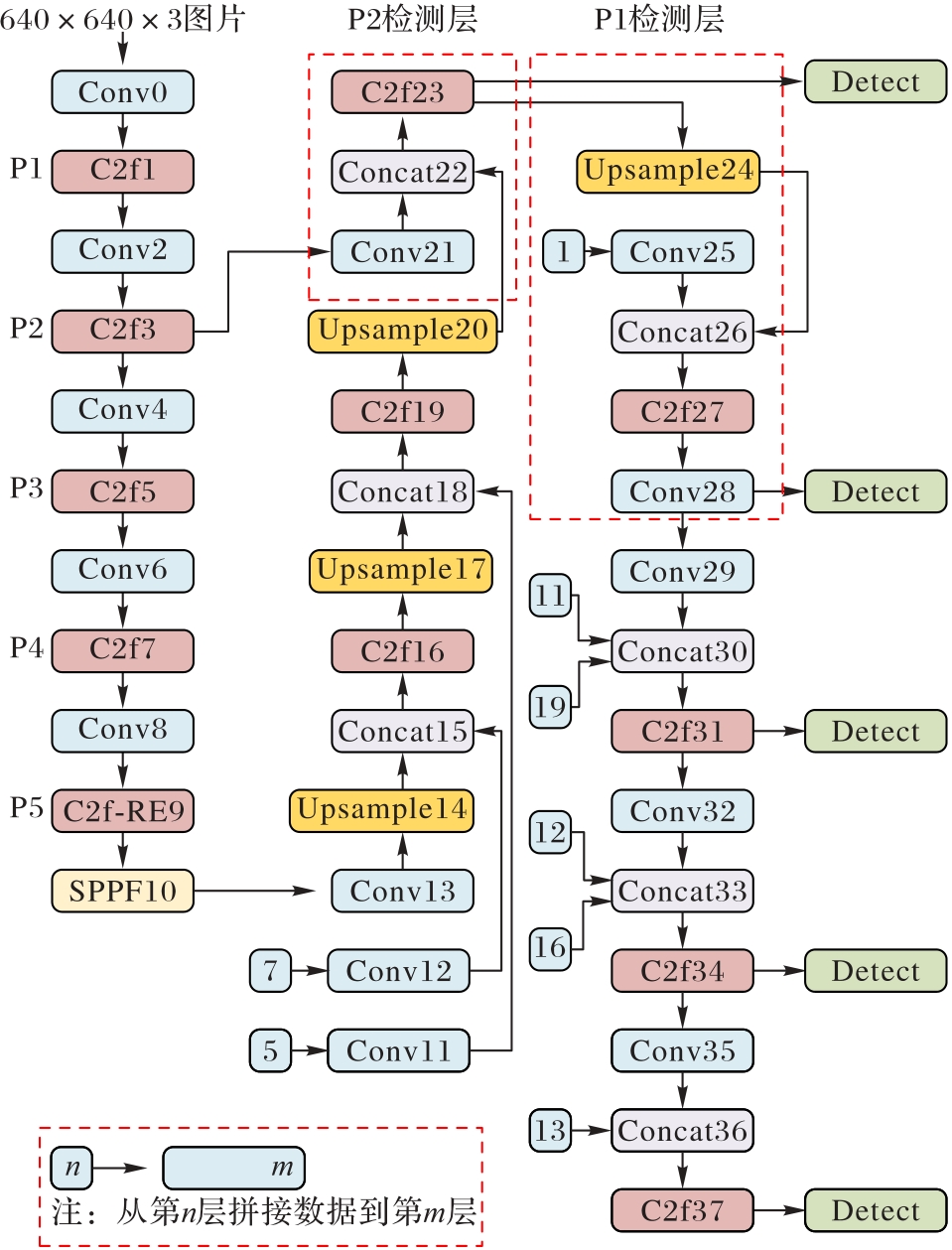
Fig. 1 BDS_YOLO network structure
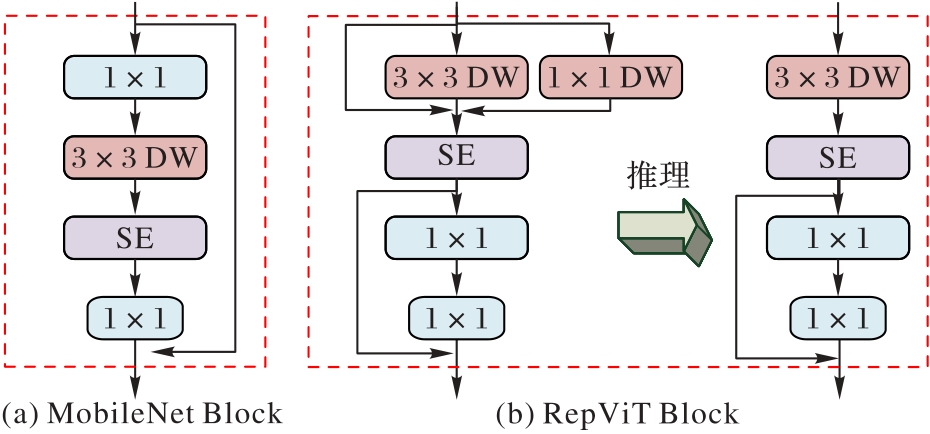
Fig. 2 Structures of MobileNet Block and RepViTBlock
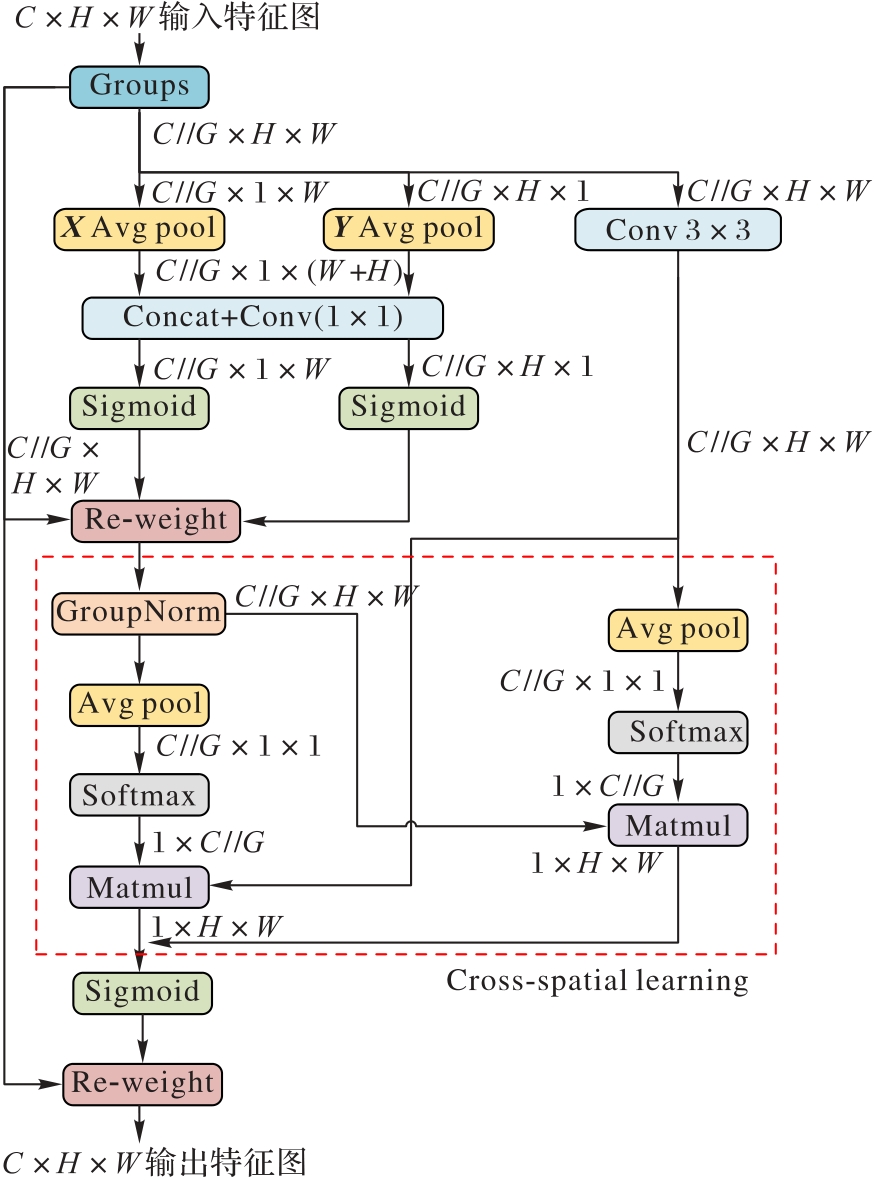
Fig. 3 Structure of EMA mechanism
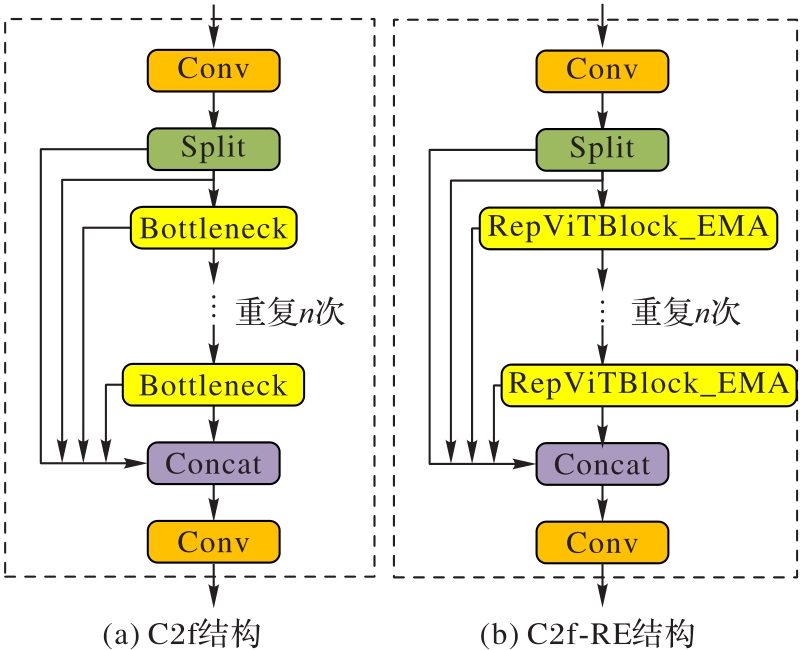
Fig. 4 Structure of comparison of C2f and C2f-RE
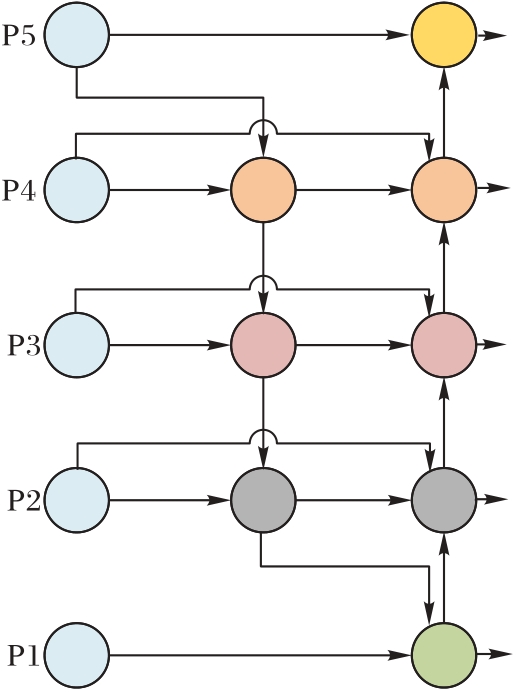
Fig. 5 Network structure of BiFPN
| 参数 | 设置 | 参数 | 设置 |
|---|---|---|---|
| epochs | 200 | Irf | 0.01 |
| imgsz | 640 | patience | 20 |
| batch | 8 | Ir0 | 0.01 |
| workers | 8 | momentum | 0.937 |
Tab. 1 Experimental parameter setting
| 参数 | 设置 | 参数 | 设置 |
|---|---|---|---|
| epochs | 200 | Irf | 0.01 |
| imgsz | 640 | patience | 20 |
| batch | 8 | Ir0 | 0.01 |
| workers | 8 | momentum | 0.937 |
| 位置 | 精确率 | 召回率 | mAP@50 | mAP@50:95 |
|---|---|---|---|---|
| P5 | 0.531 | 0.416 | 0.424 | 0.248 |
| P4 P5 | 0.516 | 0.413 | 0.423 | 0.246 |
| P3 P4 P5 | 0.511 | 0.411 | 0.418 | 0.244 |
| P2 P3 P4 P5 | 0.512 | 0.407 | 0.414 | 0.241 |
| P1 P2 P3 P4 P5 | 0.514 | 0.403 | 0.411 | 0.238 |
Tab. 2 Experimental results of improving position and number of C2f
| 位置 | 精确率 | 召回率 | mAP@50 | mAP@50:95 |
|---|---|---|---|---|
| P5 | 0.531 | 0.416 | 0.424 | 0.248 |
| P4 P5 | 0.516 | 0.413 | 0.423 | 0.246 |
| P3 P4 P5 | 0.511 | 0.411 | 0.418 | 0.244 |
| P2 P3 P4 P5 | 0.512 | 0.407 | 0.414 | 0.241 |
| P1 P2 P3 P4 P5 | 0.514 | 0.403 | 0.411 | 0.238 |
| ratio | 精确率 | 召回率 | mAP@50 | mAP@50:95 |
|---|---|---|---|---|
| 0.8 | 0.461 | 0.337 | 0.332 | 0.188 |
| 0.9 | 0.458 | 0.339 | 0.333 | 0.190 |
| 1.0 | 0.439 | 0.342 | 0.333 | 0.189 |
| 1.1 | 0.465 | 0.343 | 0.338 | 0.192 |
| 1.2 | 0.460 | 0.332 | 0.332 | 0.190 |
| 1.3 | 0.444 | 0.343 | 0.333 | 0.190 |
| 1.4 | 0.464 | 0.336 | 0.332 | 0.189 |
Tab. 3 Experimental results of ratio coefficient
| ratio | 精确率 | 召回率 | mAP@50 | mAP@50:95 |
|---|---|---|---|---|
| 0.8 | 0.461 | 0.337 | 0.332 | 0.188 |
| 0.9 | 0.458 | 0.339 | 0.333 | 0.190 |
| 1.0 | 0.439 | 0.342 | 0.333 | 0.189 |
| 1.1 | 0.465 | 0.343 | 0.338 | 0.192 |
| 1.2 | 0.460 | 0.332 | 0.332 | 0.190 |
| 1.3 | 0.444 | 0.343 | 0.333 | 0.190 |
| 1.4 | 0.464 | 0.336 | 0.332 | 0.189 |
| 损失函数 | 精确率 | 召回率 | mAP@50 | mAP@50:95 |
|---|---|---|---|---|
| Inner-EIoU | 0.465 | 0.343 | 0.338 | 0.192 |
| SIoU | 0.447 | 0.340 | 0.330 | 0.187 |
| NWD | 0.458 | 0.342 | 0.334 | 0.174 |
| Inner-MPDIoU | 0.438 | 0.343 | 0.333 | 0.188 |
Tab. 4 Comparison experimental results of different loss functions
| 损失函数 | 精确率 | 召回率 | mAP@50 | mAP@50:95 |
|---|---|---|---|---|
| Inner-EIoU | 0.465 | 0.343 | 0.338 | 0.192 |
| SIoU | 0.447 | 0.340 | 0.330 | 0.187 |
| NWD | 0.458 | 0.342 | 0.334 | 0.174 |
| Inner-MPDIoU | 0.438 | 0.343 | 0.333 | 0.188 |
| 模型 | C2f-RE | BiFPN | P2检测层 | P1检测层 | Inner-EIoU | 模型大小/MB | 参数量/106 | 精确率 | 召回率 | mAP@50 | mAP@50:95 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| A | 5.97 | 3.01 | 0.447 | 0.339 | 0.334 | 0.187 | |||||
| B | √ | 5.45 | 2.76 | 0.449 | 0.347 | 0.336 | 0.191 | ||||
| C | √ | 7.66 | 3.88 | 0.465 | 0.356 | 0.354 | 0.201 | ||||
| D | √ | √ | 4.64 | 2.23 | 0.471 | 0.377 | 0.378 | 0.217 | |||
| E | √ | √ | √ | 5.25 | 2.46 | 0.506 | 0.416 | 0.416 | 0.241 | ||
| F | √ | 5.97 | 3.01 | 0.465 | 0.343 | 0.338 | 0.192 | ||||
| G | √ | √ | √ | √ | 4.83 | 2.23 | 0.531 | 0.416 | 0.424 | 0.248 | |
| H | √ | √ | √ | √ | √ | 4.83 | 2.23 | 0.532 | 0.416 | 0.426 | 0.250 |
Tab. 5 Ablation experimental results of improved model
| 模型 | C2f-RE | BiFPN | P2检测层 | P1检测层 | Inner-EIoU | 模型大小/MB | 参数量/106 | 精确率 | 召回率 | mAP@50 | mAP@50:95 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| A | 5.97 | 3.01 | 0.447 | 0.339 | 0.334 | 0.187 | |||||
| B | √ | 5.45 | 2.76 | 0.449 | 0.347 | 0.336 | 0.191 | ||||
| C | √ | 7.66 | 3.88 | 0.465 | 0.356 | 0.354 | 0.201 | ||||
| D | √ | √ | 4.64 | 2.23 | 0.471 | 0.377 | 0.378 | 0.217 | |||
| E | √ | √ | √ | 5.25 | 2.46 | 0.506 | 0.416 | 0.416 | 0.241 | ||
| F | √ | 5.97 | 3.01 | 0.465 | 0.343 | 0.338 | 0.192 | ||||
| G | √ | √ | √ | √ | 4.83 | 2.23 | 0.531 | 0.416 | 0.424 | 0.248 | |
| H | √ | √ | √ | √ | √ | 4.83 | 2.23 | 0.532 | 0.416 | 0.426 | 0.250 |
| 模型 | 模型大小/MB | 参数量/106 | 精确率 | 召回率 | mAP@50 | mAP@50:95 |
|---|---|---|---|---|---|---|
| YOLOv3n | 7.95 | 4.06 | 0.447 | 0.333 | 0.329 | 0.189 |
| YOLOv5n | 5.03 | 2.50 | 0.442 | 0.337 | 0.332 | 0.181 |
| YOLOv6n | 8.29 | 4.23 | 0.404 | 0.312 | 0.294 | 0.167 |
| YOLOv8n | 5.97 | 3.01 | 0.447 | 0.339 | 0.334 | 0.187 |
| ASF-YOLO | 5.08 | 2.52 | 0.436 | 0.341 | 0.33 | 0.186 |
| YOLOv8s | 24.10 | 11.10 | 0.521 | 0.401 | 0.404 | 0.233 |
| BDS-YOLOv8n | 4.83 | 2.23 | 0.532 | 0.416 | 0.426 | 0.250 |
| BDS-YOLOv8s | 15.70 | 7.95 | 0.590 | 0.486 | 0.502 | 0.295 |
Tab. 6 Comparative experimental results between proposed improved model and YOLO series models
| 模型 | 模型大小/MB | 参数量/106 | 精确率 | 召回率 | mAP@50 | mAP@50:95 |
|---|---|---|---|---|---|---|
| YOLOv3n | 7.95 | 4.06 | 0.447 | 0.333 | 0.329 | 0.189 |
| YOLOv5n | 5.03 | 2.50 | 0.442 | 0.337 | 0.332 | 0.181 |
| YOLOv6n | 8.29 | 4.23 | 0.404 | 0.312 | 0.294 | 0.167 |
| YOLOv8n | 5.97 | 3.01 | 0.447 | 0.339 | 0.334 | 0.187 |
| ASF-YOLO | 5.08 | 2.52 | 0.436 | 0.341 | 0.33 | 0.186 |
| YOLOv8s | 24.10 | 11.10 | 0.521 | 0.401 | 0.404 | 0.233 |
| BDS-YOLOv8n | 4.83 | 2.23 | 0.532 | 0.416 | 0.426 | 0.250 |
| BDS-YOLOv8s | 15.70 | 7.95 | 0.590 | 0.486 | 0.502 | 0.295 |
| 模型 | 参数量/106 | mAP@50 | 帧率/(frame·s-1) |
|---|---|---|---|
| PECS-YOLO[ | 2.60 | 0.368 | 385 |
| Drone-YOLO (tiny)[ | 5.40 | 0.428 | — |
| LW-YOLO[ | 5.56 | 0.429 | 94 |
| SS-YOLO[ | 4.60 | 0.459 | 87 |
| UAV-YOLOv8[ | 10.30 | 0.470 | 51 |
| CA-YOLOv8[ | 7.40 | 0.488 | 62 |
| BDS-YOLOv8s | 7.95 | 0.502 | 106 |
Tab. 7 Comparative experimental results between proposed model and other improved models
| 模型 | 参数量/106 | mAP@50 | 帧率/(frame·s-1) |
|---|---|---|---|
| PECS-YOLO[ | 2.60 | 0.368 | 385 |
| Drone-YOLO (tiny)[ | 5.40 | 0.428 | — |
| LW-YOLO[ | 5.56 | 0.429 | 94 |
| SS-YOLO[ | 4.60 | 0.459 | 87 |
| UAV-YOLOv8[ | 10.30 | 0.470 | 51 |
| CA-YOLOv8[ | 7.40 | 0.488 | 62 |
| BDS-YOLOv8s | 7.95 | 0.502 | 106 |
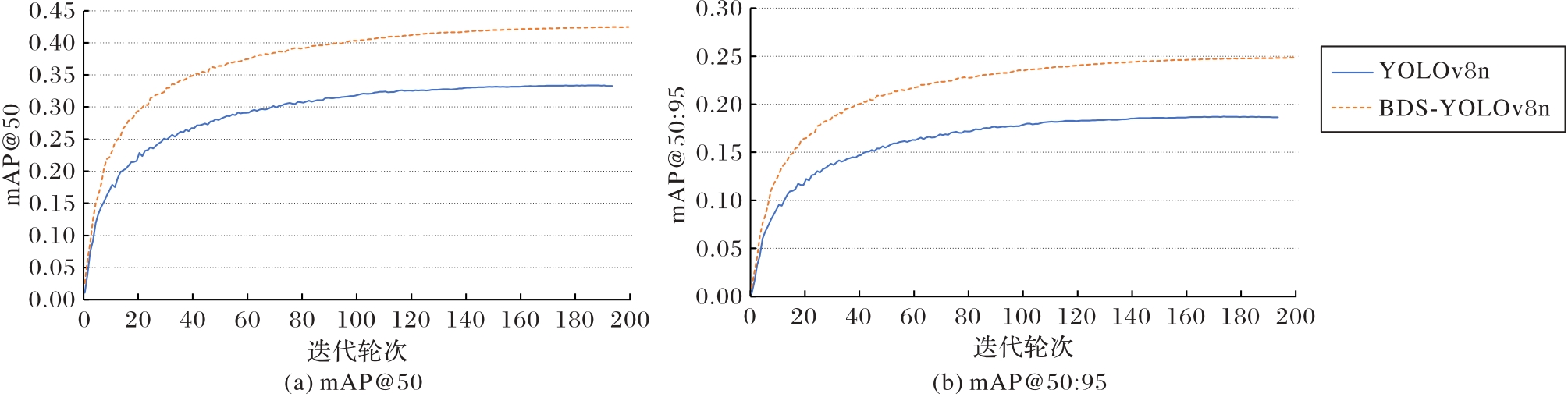
Fig. 6 Comparison experimental results at same number of iterations
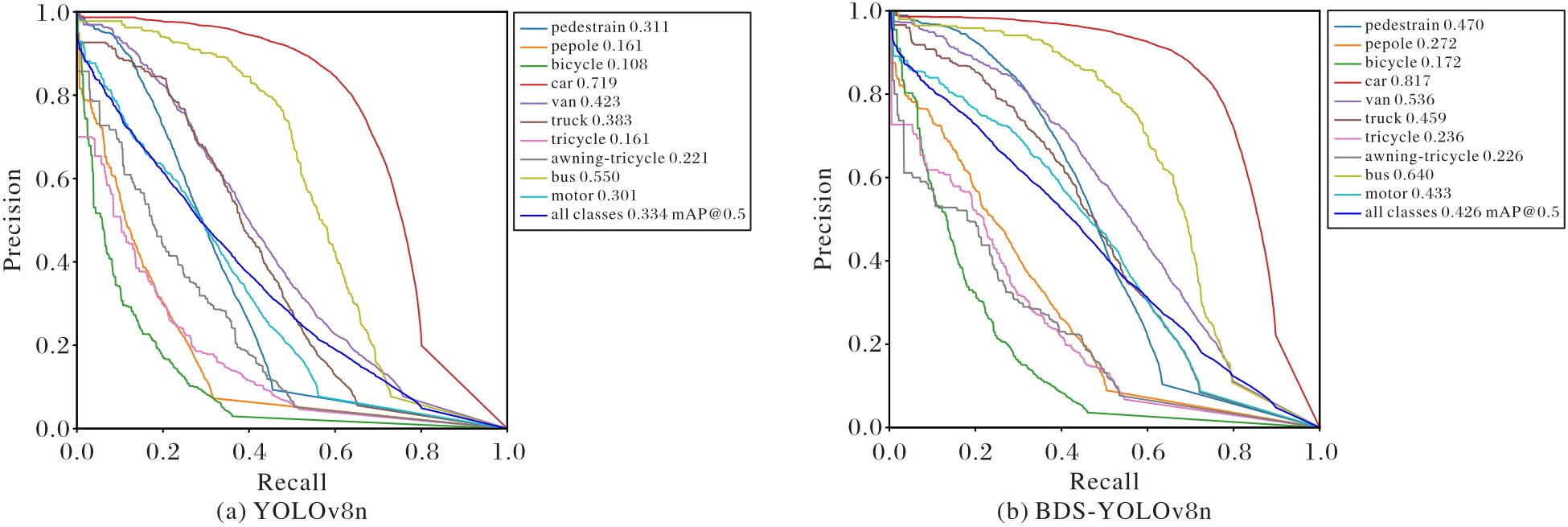
Fig. 7 Comparison experimental results of ten recognized targets

Fig. 8 Comparison experimental results of visualization
| [1] | LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection [C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017: 2999-3007. |
| [2] | LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot multiBox detector [C]// Proceedings of the 2016 European Conference on Computer Vision, LNCS 9905. Cham: Springer, 2016: 21-37. |
| [3] | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection [C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 779-788. |
| [4] | REDMON J, FARHADI A. YOLO9000: better, faster, stronger [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 6517-6525. |
| [5] | REDMON J, FARHADI A. YOLOv3: an incremental improvement [EB/OL]. [2024-07-01]. . |
| [6] | 范江霞,张文豪,张丽丽,等.改进YOLOv5的无人机影像车辆检测方法[J].遥感信息,2023, 38(3): 114-121. |
| FAN J X, ZHANG W H, ZHANG L L, et al. Vehicle detection method of UAV imagery based on improved YOLOv5 [J]. Remote Sensing Information, 2023, 38(3): 114-121. | |
| [7] | 张华卫,张文飞,蒋占军,等.引入上下文信息和Attention Gate的GUS-YOLO遥感目标检测算法[J].计算机科学与探索,2024, 18(2): 453-464. |
| ZHANG H W, ZHANG W F, JIANG Z J, et al. GUS-YOLO remote sensing target detection algorithm introducing context in-information and Attention Gate [J]. Journal of Frontiers of Computer Science and Technology, 2024, 18(2): 453-464. | |
| [8] | 黄海生,饶雪峰.面向无人机航拍场景的轻量化目标检测[J].计算机系统应用,2022, 31(12): 159-168. |
| HUANG H S, RAO X F. Lightweight object detection for drone-captured scenarios [J]. Computer Systems and Applications, 2022, 31(12): 159-168. | |
| [9] | 潘玮,韦超,钱春雨,等.面向无人机视角下小目标检测的YOLOv8s改进模型[J].计算机工程与应用,2024, 60(9): 142-150. |
| PAN W, WEI C, QIAN C Y, et al. Improved YOLOv8s model for small object detection from perspective of drones [J]. Computer Engineering and Applications, 2024, 60(9): 142-150. | |
| [10] | 梁秀满,贾梓涵,刘振东,等.改进YOLOv8n的无人机航拍图像检测算法[J/OL].电光与控制[2024-09-10].. |
| LIANG X M, JIA Z H, LIU Z D, et al. A UAV aerial image detection algorithm based on improved YOLOv 8n [J/OL]. Electronics Optics and Control[2024-09-10].. | |
| [11] | 沈学利,王灵超.基于YOLOv8n的无人机航拍目标检测[J].计算机系统应用,2024, 33(7): 139-148. |
| SHEN X L, WANG L C. UAV aerial photography target detection based on YOLOv8n [J]. Computer Systems and Applications, 2024, 33(7): 139-148. | |
| [12] | 李岩超,史卫亚,冯灿.面向无人机航拍小目标检测的轻量级YOLOv8检测算法[J].计算机工程与应用,2024, 60(17): 167-178. |
| LI Y C, SHI W Y, FENG C. Lightweight YOLOv8 detection algorithm for small object detection in UAV aerial photography [J]. Computer Engineering and Applications, 2024, 60(17): 167-178. | |
| [13] | HOU Q, ZHOU D, FENG J. Coordinate attention for efficient mobile network design [C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 13708-13717. |
| [14] | WANG A, CHEN H, LIN Z, et al. Rep ViT: revisiting mobile CNN from ViT perspective [C]// Proceedings of the 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2024: 15909-15920. |
| [15] | OUYANG D, HE S, ZHANG G, et al. Efficient multi-scale attention module with cross-spatial learning [C]// Proceedings of the 2023 IEEE International Conference on Acoustics, Speech and Signal Processing. Piscataway: IEEE, 2023: 1-5. |
| [16] | TAN M, PANG R, LE Q V. EfficientDet: scalable and efficient object detection [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 10778-10787. |
| [17] | BOCHKOVSKIY A, WANG C Y, LIAO H Y M. YOLOv4: optimal speed and accuracy of object detection [EB/OL]. [2024-05-10]. . |
| [18] | LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 936-944. |
| [19] | ZHANG H, XU C, ZHANG S. Inner-IoU: more effective intersection over union loss with auxiliary bounding box [EB/OL]. [2024-07-01]. . |
| [20] | ZHANG Y F, REN W, ZHANG Z, et al. Focal and efficient IOU loss for accurate bounding box regression [J]. Neurocomputing, 2022, 506: 146-157. |
| [21] | ZHENG Z, WANG P, LIU W, et al. Distance-IoU loss: faster and better learning for bounding box regression [C]// Proceedings of the 34th AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2020: 12993-13000. |
| [22] | GE Z, LIU S, WANG F, et al. YOLOx: exceeding YOLO series in 2021 [EB/OL]. [2024-07-01]. . |
| [23] | JIANG B, LOU R, MAO J, et al. Acquisition of localization confidence for accurate object detection [C]// Proceedings of the 2018 European Conference on Computer Vision, LNCS 11218. Cham: Springer, 2018: 816-832. |
| [24] | REZATOFIGHI H, TSOI N, GWAK J, et al. Generalized intersection over union: a metric and a loss for bounding box regression [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 658-666. |
| [25] | DOSOVITSKIY A, BEYER L, KOLESNIKOV A, et al. An image is worth 16x16 words: Transformers for images recognition at scale [EB/OL]. [2024-07-01]. . |
| [26] | HOWARD A, SANDLER M, CHU G, et al. Searching for MobileNetV3 [C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 1314-1324. |
| [27] | HU J, SHEN L, SUN G. Squeeze-and-excitation networks [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 7132-7141. |
| [28] | YIN X, GOUDRIAAN JAN, LANTINGA E A, et al. A flexible sigmoid function of determinate growth [J]. Annals of Botany, 2003, 91(3): 361-371. |
| [29] | DU D, ZHU P, WEN L, et al. VisDrone-DET2019: the vision meets drone object detection in image challenge results [C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision Workshops. Piscataway: IEEE, 2019: 213-226. |
| [30] | GEVORGYAN Z. SIoU loss: more powerful learning for bounding box regression [EB/OL]. [2024-06-05]. . |
| [31] | WANG J, XU C, YANG W, et al. A normalized Gaussian Wasserstein distance for tiny object detection [EB/OL]. [2024-07-01]. . |
| [32] | MA S, XU Y. MPDIoU: a loss for efficient and accurate bounding box regression [EB/OL]. [2024-06-05]. . |
| [33] | KANG M, TING C M, TING F F, et al. ASF-YOLO: a novel YOLO model with attentional scale sequence fusion for cell instance segmentation [J]. Image and Vision Computing, 2024, 147: No.105057. |
| [34] | 王舒梦,徐慧英,朱信忠,等.基于改进YOLOv8n航拍轻量化小目标检测算法:PECS-YOLO [J/OL].计算机工程[2024-06-01]. . |
| WANG S M, XU H Y, ZHU X Z, et al. Lightweight small object detection algorithm based on improved YOLOv8n aerial photography: PECS-YOLO [J/OL]. Computer Engineering [2024-06-01]. . | |
| [35] | ZHANG Z. Drone-YOLO: an efficient neural network method for target detection in drone images [J]. Drones, 2023, 7(8): No.526. |
| [36] | 李姝,李思远,刘国庆.基于YOLOv8无人机航拍图像的小目标检测算法研究[J].小型微型计算机系统,2024, 45(9): 2165-2174. |
| LI S, LI S Y, LIU G Q. Research on small target detection algorithm based on YOLOv8 UAV aerial images [J]. Journal of Chinese Computer Systems, 2024, 45(9): 2165-2174. | |
| [37] | 胡清翔,饶文碧,熊盛武.面向无人机遥感场景的轻量级小目标检测算法[J].计算机工程,2023, 49(12): 169-177. |
| HU Q X, RAO W B, XIONG S W. Lightweight small object detection algorithm for UAV remote sensing scene [J]. Computer Engineering, 2023, 49(12): 169-177. | |
| [38] | WANG G, CHEN Y, AN P, et al. UAV-YOLOv8: a small-object -detection model based on improved YOLOv8 for UAV aerial photography scenarios [J]. Sensors, 2023, 23(16): No.7190. |
| [39] | 付锦燚,张自嘉,孙伟,等.改进YOLOv8的航拍图像小目标检测算法[J].计算机工程与应用,2024, 60(6): 100-109. |
| FU J Y, ZHANG Z J, SUN W, et al. Improved YOLOv8 small target detection algorithm in aerial images [J]. Computer Engineering and Applications, 2024, 60(6): 100-109. |
| [1] | Hengxian TANG, Yuan YAO, Haoxiang KANG. Research and implementation of large-scale unmanned aerial vehicle swarm simulation engine based on container [J]. Journal of Computer Applications, 2025, 45(8): 2704-2711. |
| [2] | Liang CHEN, Xuan WANG, Kun LEI. Helmet wearing detection algorithm for complex scenarios based on cross-layer multi-scale feature fusion [J]. Journal of Computer Applications, 2025, 45(7): 2333-2341. |
| [3] | Bingquan LIN, Lei LIU, Huafeng LI, Chen LIU. Secure cluster control of UAVs under DoS attacks based on APF and DDPG algorithm [J]. Journal of Computer Applications, 2025, 45(4): 1241-1248. |
| [4] | Quan WANG, Xinyu CAO, Qidong CHEN. Roadside traffic object detection model and deployment for vehicle-road collaboration [J]. Journal of Computer Applications, 2025, 45(3): 1016-1024. |
| [5] | Xingwang WANG, Qingyang ZHANG, Shouyong JIANG, Yongquan DONG. Dynamic UAV path planning based on modified whale optimization algorithm [J]. Journal of Computer Applications, 2025, 45(3): 928-936. |
| [6] | Qiurun HE, Jie HU, Bo PENG, Tianyuan LI. Fabric defect detection algorithm based on context information and multi-scale feature fusion [J]. Journal of Computer Applications, 2025, 45(2): 640-646. |
| [7] | Songsen YU, Zhifan LIN, Guopeng XUE, Jianyu XU. Lightweight large-format tile defect detection algorithm based on improved YOLOv8 [J]. Journal of Computer Applications, 2025, 45(2): 647-654. |
| [8] | Jiayang GUI, Shunji WANG, Zhengkang ZHOU, Jiashan TANG. Tunnel foreign object detection algorithm based on improved YOLOv8n [J]. Journal of Computer Applications, 2025, 45(2): 655-661. |
| [9] | Shang LIU, Yuwei ZHOU, Rao DAI, Linfang DONG, Meng LIU. Small target detection algorithm in remote sensing images integrating attention and contextual information [J]. Journal of Computer Applications, 2025, 45(1): 292-300. |
| [10] | Lingxia MU, Zhengjun ZHOU, Ban WANG, Youmin ZHANG, Xianghong XUE, Kaikai NING. Formation obstacle-avoidance and reconfiguration method for multiple UAVs [J]. Journal of Computer Applications, 2024, 44(9): 2938-2946. |
| [11] | Huantong GENG, Zhenyu LIU, Jun JIANG, Zichen FAN, Jiaxing LI. Embedded road crack detection algorithm based on improved YOLOv8 [J]. Journal of Computer Applications, 2024, 44(5): 1613-1618. |
| [12] | Tianyu HUANG, Yuanxing LI, Hao CHEN, Zijia GUO, Mingjun WEI. User cluster partitioning method based on weighted fuzzy clustering in ground-air collaboration scenarios [J]. Journal of Computer Applications, 2024, 44(5): 1555-1561. |
| [13] | Zhiqiang ZHENG, Haibin DUAN. Short-range UAV air combat maneuver decision-making via finite tolerance pigeon-inspired optimization [J]. Journal of Computer Applications, 2024, 44(5): 1401-1407. |
| [14] | Rui TANG, Shibo YUE, Ruizhi ZHANG, Chuan LIU, Chuanlin PANG. Energy efficiency optimization mechanism for UAV-assisted and non-orthogonal multiple access-enabled data collection system [J]. Journal of Computer Applications, 2024, 44(4): 1209-1218. |
| [15] | Meiyu CAI, Runzhe ZHU, Fei WU, Kaiyu ZHANG, Jiale LI. Cross-view matching model based on attention mechanism and multi-granularity feature fusion [J]. Journal of Computer Applications, 2024, 44(3): 901-908. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||