


Journal of Computer Applications ›› 2025, Vol. 45 ›› Issue (3): 928-936.DOI: 10.11772/j.issn.1001-9081.2024030370
• Advanced computing • Previous Articles Next Articles
Xingwang WANG1, Qingyang ZHANG1( ), Shouyong JIANG2, Yongquan DONG1
), Shouyong JIANG2, Yongquan DONG1
Received:2024-04-02
Revised:2024-04-26
Accepted:2024-04-28
Online:2024-05-16
Published:2025-03-10
Contact:
Qingyang ZHANG
About author:WANG Xingwang, born in 1998, M. S. candidate. His research interests include evolutionary algorithm, intelligent algorithms.Supported by:
王兴旺1, 张清杨1(), 姜守勇2, 董永权1
通讯作者:
张清杨
作者简介:王兴旺(1998—),男,江苏徐州人,硕士研究生,主要研究方向:进化算法、智能算法基金资助:CLC Number:
Xingwang WANG, Qingyang ZHANG, Shouyong JIANG, Yongquan DONG. Dynamic UAV path planning based on modified whale optimization algorithm[J]. Journal of Computer Applications, 2025, 45(3): 928-936.
王兴旺, 张清杨, 姜守勇, 董永权. 基于改进鲸鱼优化算法的动态无人机路径规划[J]. 《计算机应用》唯一官方网站, 2025, 45(3): 928-936.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2024030370
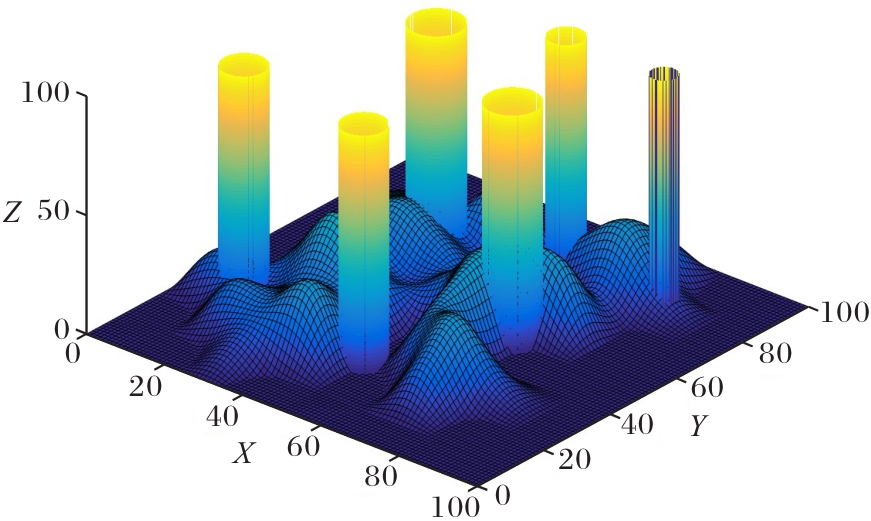
Fig. 1 Schematic diagram of environmental model
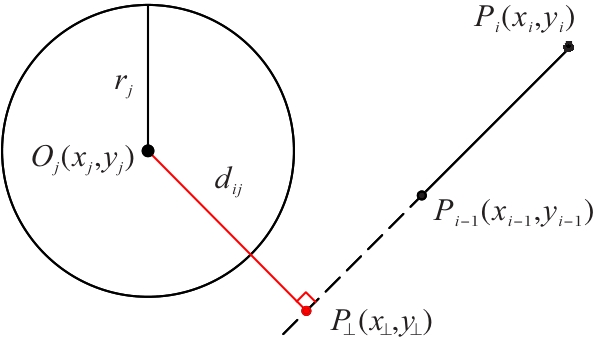
Fig. 2 Threat cost calculation model
| 函数 | 指标 | WOA | PSO | AHA | TIWOA | IMWOA | HHO | MWOA |
|---|---|---|---|---|---|---|---|---|
| F1 | mean | 3.71E+04 | 1.51E+04 | 1.44E+04 | 4.11E+04 | 1.94E+04 | 9.66E+03 | 3.02E+02 |
| std | 1.48E+04 | 8.08E+03 | 6.68E+03 | 2.50E+04 | 1.12E+04 | 6.46E+02 | 1.26E+00 | |
| p | 3.02E-11 | 3.02E-11 | 3.02E-11 | 3.02E-11 | 3.02E-11 | 3.02E-11 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F2 | mean | 5.61E+02 | 1.03E+03 | 4.61E+02 | 7.56E+02 | 6.02E+02 | 1.96E+03 | 4.24E+02 |
| std | 1.34E+02 | 6.34E+02 | 4.55E+01 | 2.46E+02 | 2.03E+02 | 8.77E+02 | 3.22E+01 | |
| p | 9.26E-09 | 3.02E-11 | 1.87E-05 | 3.02E-11 | 2.32E-06 | 3.02E-11 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F3 | mean | 6.46E+02 | 6.93E+02 | 6.33E+02 | 6.48E+02 | 6.50E+02 | 6.56E+02 | 6.09E+02 |
| std | 1.72E+01 | 1.43E+01 | 1.26E+01 | 1.76E+01 | 1.49E+01 | 7.67E+00 | 7.36E+00 | |
| p | 1.61E-10 | 3.02E-11 | 1.17E-09 | 4.98E-11 | 3.69E-11 | 3.02E-11 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F4 | mean | 8.50E+02 | 9.09E+02 | 8.32E+02 | 8.57E+02 | 8.51E+02 | 8.58E+02 | 8.34E+02 |
| std | 1.62E+01 | 1.74E+01 | 1.15E+01 | 1.09E+01 | 1.80E+01 | 7.33E+00 | 1.69E+01 | |
| p | 4.46E-04 | 3.34E-11 | 8.53E-01 | 7.60E-07 | 4.71E-04 | 1.16E-07 | — | |
| h | 1 | 1 | 0 | 1 | 1 | 1 | — | |
| F5 | mean | 1.93E+03 | 3.85E+03 | 1.39E+03 | 1.61E+03 | 1.89E+03 | 1.55E+03 | 9.72E+02 |
| std | 7.95E+02 | 9.58E+02 | 2.45E+02 | 3.79E+02 | 5.61E+02 | 2.01E+02 | 7.37E+01 | |
| p | 6.70E-11 | 3.02E-11 | 4.62E-10 | 9.92E-11 | 6.07E-11 | 3.02E-11 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F6 | mean | 1.60E+07 | 2.52E+07 | 2.87E+05 | 1.21E+07 | 2.67E+07 | 2.98E+07 | 3.78E+03 |
| std | 8.16E+07 | 8.88E+07 | 4.19E+05 | 2.65E+07 | 1.24E+08 | 2.13E+07 | 1.98E+03 | |
| p | 9.06E-08 | 4.50E-11 | 3.02E-11 | 1.96E-10 | 1.78E-10 | 3.02E-11 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F7 | mean | 2.10E+03 | 2.17E+03 | 2.07E+03 | 2.12E+03 | 2.11E+03 | 2.12E+03 | 2.04E+03 |
| std | 4.14E+01 | 4.68E+01 | 2.38E+01 | 4.00E+01 | 4.76E+01 | 1.94E+01 | 1.41E+01 | |
| p | 3.82E-09 | 3.02E-11 | 4.31E-08 | 3.69E-11 | 5.07E-10 | 3.02E-11 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F8 | mean | 2.24E+03 | 2.28E+03 | 2.25E+03 | 2.26E+03 | 2.26E+03 | 2.27E+03 | 2.22E+03 |
| std | 2.46E+01 | 5.37E+01 | 3.87E+01 | 4.53E+01 | 4.61E+01 | 2.93E+01 | 3.89E+00 | |
| p | 3.02E-11 | 3.02E-11 | 6.70E-11 | 3.02E-11 | 4.62E-10 | 3.02E-11 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F9 | mean | 2.69E+03 | 2.73E+03 | 2.62E+03 | 2.72E+03 | 2.68E+03 | 2.78E+03 | 2.53E+03 |
| std | 6.70E+01 | 5.41E+01 | 4.59E+01 | 3.95E+01 | 4.68E+01 | 4.53E+01 | 2.68E+01 | |
| p | 1.09E-10 | 4.50E-11 | 4.62E-10 | 4.08E-11 | 1.33E-10 | 3.02E-11 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F10 | mean | 2.70E+03 | 3.47E+03 | 2.59E+03 | 2.73E+03 | 2.62E+03 | 2.67E+03 | 2.56E+03 |
| std | 3.37E+02 | 8.12E+02 | 1.02E+02 | 2.70E+02 | 1.55E+02 | 1.38E+02 | 7.18E+01 | |
| p | 7.29E-03 | 4.57E-09 | 6.97E-03 | 6.01E-08 | 1.68E-03 | 6.91E-04 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F11 | mean | 2.92E+03 | 3.28E+03 | 2.85E+03 | 3.12E+03 | 2.82E+03 | 3.61E+03 | 2.74E+03 |
| std | 2.23E+02 | 4.83E+02 | 2.04E+02 | 2.98E+02 | 1.53E+02 | 3.57E+02 | 1.77E+02 | |
| p | 2.77E-05 | 3.65E-08 | 7.96E-03 | 1.73E-07 | 2.16E-03 | 8.99E-11 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F12 | mean | 1.33E+04 | 3.23E+03 | 2.89E+03 | 2.94E+03 | 7.92E+03 | 2.92E+03 | 2.88E+03 |
| std | 8.25E+03 | 1.87E+02 | 3.13E+01 | 5.64E+01 | 6.85E+03 | 4.27E+01 | 1.49E+01 | |
| p | 3.69E-11 | 3.02E-11 | 4.29E-01 | 1.43E-08 | 4.57E-09 | 3.08E-08 | — | |
| h | 1 | 1 | 0 | 1 | 1 | 1 | — |
Tab. 1 Test results of different algorithms
| 函数 | 指标 | WOA | PSO | AHA | TIWOA | IMWOA | HHO | MWOA |
|---|---|---|---|---|---|---|---|---|
| F1 | mean | 3.71E+04 | 1.51E+04 | 1.44E+04 | 4.11E+04 | 1.94E+04 | 9.66E+03 | 3.02E+02 |
| std | 1.48E+04 | 8.08E+03 | 6.68E+03 | 2.50E+04 | 1.12E+04 | 6.46E+02 | 1.26E+00 | |
| p | 3.02E-11 | 3.02E-11 | 3.02E-11 | 3.02E-11 | 3.02E-11 | 3.02E-11 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F2 | mean | 5.61E+02 | 1.03E+03 | 4.61E+02 | 7.56E+02 | 6.02E+02 | 1.96E+03 | 4.24E+02 |
| std | 1.34E+02 | 6.34E+02 | 4.55E+01 | 2.46E+02 | 2.03E+02 | 8.77E+02 | 3.22E+01 | |
| p | 9.26E-09 | 3.02E-11 | 1.87E-05 | 3.02E-11 | 2.32E-06 | 3.02E-11 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F3 | mean | 6.46E+02 | 6.93E+02 | 6.33E+02 | 6.48E+02 | 6.50E+02 | 6.56E+02 | 6.09E+02 |
| std | 1.72E+01 | 1.43E+01 | 1.26E+01 | 1.76E+01 | 1.49E+01 | 7.67E+00 | 7.36E+00 | |
| p | 1.61E-10 | 3.02E-11 | 1.17E-09 | 4.98E-11 | 3.69E-11 | 3.02E-11 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F4 | mean | 8.50E+02 | 9.09E+02 | 8.32E+02 | 8.57E+02 | 8.51E+02 | 8.58E+02 | 8.34E+02 |
| std | 1.62E+01 | 1.74E+01 | 1.15E+01 | 1.09E+01 | 1.80E+01 | 7.33E+00 | 1.69E+01 | |
| p | 4.46E-04 | 3.34E-11 | 8.53E-01 | 7.60E-07 | 4.71E-04 | 1.16E-07 | — | |
| h | 1 | 1 | 0 | 1 | 1 | 1 | — | |
| F5 | mean | 1.93E+03 | 3.85E+03 | 1.39E+03 | 1.61E+03 | 1.89E+03 | 1.55E+03 | 9.72E+02 |
| std | 7.95E+02 | 9.58E+02 | 2.45E+02 | 3.79E+02 | 5.61E+02 | 2.01E+02 | 7.37E+01 | |
| p | 6.70E-11 | 3.02E-11 | 4.62E-10 | 9.92E-11 | 6.07E-11 | 3.02E-11 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F6 | mean | 1.60E+07 | 2.52E+07 | 2.87E+05 | 1.21E+07 | 2.67E+07 | 2.98E+07 | 3.78E+03 |
| std | 8.16E+07 | 8.88E+07 | 4.19E+05 | 2.65E+07 | 1.24E+08 | 2.13E+07 | 1.98E+03 | |
| p | 9.06E-08 | 4.50E-11 | 3.02E-11 | 1.96E-10 | 1.78E-10 | 3.02E-11 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F7 | mean | 2.10E+03 | 2.17E+03 | 2.07E+03 | 2.12E+03 | 2.11E+03 | 2.12E+03 | 2.04E+03 |
| std | 4.14E+01 | 4.68E+01 | 2.38E+01 | 4.00E+01 | 4.76E+01 | 1.94E+01 | 1.41E+01 | |
| p | 3.82E-09 | 3.02E-11 | 4.31E-08 | 3.69E-11 | 5.07E-10 | 3.02E-11 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F8 | mean | 2.24E+03 | 2.28E+03 | 2.25E+03 | 2.26E+03 | 2.26E+03 | 2.27E+03 | 2.22E+03 |
| std | 2.46E+01 | 5.37E+01 | 3.87E+01 | 4.53E+01 | 4.61E+01 | 2.93E+01 | 3.89E+00 | |
| p | 3.02E-11 | 3.02E-11 | 6.70E-11 | 3.02E-11 | 4.62E-10 | 3.02E-11 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F9 | mean | 2.69E+03 | 2.73E+03 | 2.62E+03 | 2.72E+03 | 2.68E+03 | 2.78E+03 | 2.53E+03 |
| std | 6.70E+01 | 5.41E+01 | 4.59E+01 | 3.95E+01 | 4.68E+01 | 4.53E+01 | 2.68E+01 | |
| p | 1.09E-10 | 4.50E-11 | 4.62E-10 | 4.08E-11 | 1.33E-10 | 3.02E-11 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F10 | mean | 2.70E+03 | 3.47E+03 | 2.59E+03 | 2.73E+03 | 2.62E+03 | 2.67E+03 | 2.56E+03 |
| std | 3.37E+02 | 8.12E+02 | 1.02E+02 | 2.70E+02 | 1.55E+02 | 1.38E+02 | 7.18E+01 | |
| p | 7.29E-03 | 4.57E-09 | 6.97E-03 | 6.01E-08 | 1.68E-03 | 6.91E-04 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F11 | mean | 2.92E+03 | 3.28E+03 | 2.85E+03 | 3.12E+03 | 2.82E+03 | 3.61E+03 | 2.74E+03 |
| std | 2.23E+02 | 4.83E+02 | 2.04E+02 | 2.98E+02 | 1.53E+02 | 3.57E+02 | 1.77E+02 | |
| p | 2.77E-05 | 3.65E-08 | 7.96E-03 | 1.73E-07 | 2.16E-03 | 8.99E-11 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| F12 | mean | 1.33E+04 | 3.23E+03 | 2.89E+03 | 2.94E+03 | 7.92E+03 | 2.92E+03 | 2.88E+03 |
| std | 8.25E+03 | 1.87E+02 | 3.13E+01 | 5.64E+01 | 6.85E+03 | 4.27E+01 | 1.49E+01 | |
| p | 3.69E-11 | 3.02E-11 | 4.29E-01 | 1.43E-08 | 4.57E-09 | 3.08E-08 | — | |
| h | 1 | 1 | 0 | 1 | 1 | 1 | — |
| 序号 | Map1 | 序号 | Map2 | ||
|---|---|---|---|---|---|
| 威胁中心 | 威胁半径 | 威胁中心 | 威胁半径 | ||
| 1 | (65,52) | 6 | 1 | (75,52) | 7 |
| 2 | (15,30) | 5 | 2 | (25,20) | 5 |
| 3 | (32,68) | 6 | 3 | (12,80) | 6 |
| 4 | (49,26) | 5 | 4 | (49,56) | 5 |
| 5 | (55,80) | 4 | 5 | (55,88) | 6 |
Tab. 2 Threat zone information
| 序号 | Map1 | 序号 | Map2 | ||
|---|---|---|---|---|---|
| 威胁中心 | 威胁半径 | 威胁中心 | 威胁半径 | ||
| 1 | (65,52) | 6 | 1 | (75,52) | 7 |
| 2 | (15,30) | 5 | 2 | (25,20) | 5 |
| 3 | (32,68) | 6 | 3 | (12,80) | 6 |
| 4 | (49,26) | 5 | 4 | (49,56) | 5 |
| 5 | (55,80) | 4 | 5 | (55,88) | 6 |
| 地图 | 指标 | WOA | PSO | AHA | TIWOA | IMWOA | HHO | MWOA |
|---|---|---|---|---|---|---|---|---|
| Map1 | mean | 1.24E+02 | 2.02E+02 | 1.17E+02 | 1.29E+02 | 1.20E+02 | 1.76E+02 | 1.13E+02 |
| std | 3.38E+00 | 1.76E+01 | 2.29E+00 | 1.44E+01 | 6.42E+00 | 4.89E+01 | 2.12E+00 | |
| p | 1.83E-04 | 1.83E-04 | 5.83E-04 | 1.83E-04 | 4.40E-04 | 1.83E-04 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| Map2 | mean | 1.17E+02 | 5.15E+02 | 1.18E+02 | 1.18E+02 | 1.19E+02 | 1.86E+02 | 1.13E+02 |
| std | 3.87E+00 | 2.58E+02 | 2.74E+00 | 5.46E+00 | 1.91E+00 | 6.10E+01 | 1.88E+00 | |
| p | 2.57E-02 | 1.83E-04 | 4.40E-04 | 1.83E-04 | 2.46E-04 | 1.83E-04 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — |
Tab. 3 Experimental results of path planning
| 地图 | 指标 | WOA | PSO | AHA | TIWOA | IMWOA | HHO | MWOA |
|---|---|---|---|---|---|---|---|---|
| Map1 | mean | 1.24E+02 | 2.02E+02 | 1.17E+02 | 1.29E+02 | 1.20E+02 | 1.76E+02 | 1.13E+02 |
| std | 3.38E+00 | 1.76E+01 | 2.29E+00 | 1.44E+01 | 6.42E+00 | 4.89E+01 | 2.12E+00 | |
| p | 1.83E-04 | 1.83E-04 | 5.83E-04 | 1.83E-04 | 4.40E-04 | 1.83E-04 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — | |
| Map2 | mean | 1.17E+02 | 5.15E+02 | 1.18E+02 | 1.18E+02 | 1.19E+02 | 1.86E+02 | 1.13E+02 |
| std | 3.87E+00 | 2.58E+02 | 2.74E+00 | 5.46E+00 | 1.91E+00 | 6.10E+01 | 1.88E+00 | |
| p | 2.57E-02 | 1.83E-04 | 4.40E-04 | 1.83E-04 | 2.46E-04 | 1.83E-04 | — | |
| h | 1 | 1 | 1 | 1 | 1 | 1 | — |

Fig. 3 Path planning results of different algorithms on Map1

Fig. 4 Path planning results of different algorithms on Map2
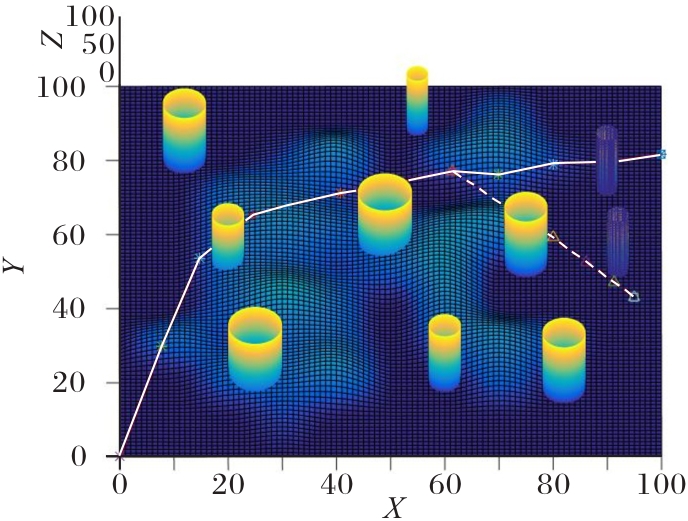
Fig. 5 Path planning result of MWOA
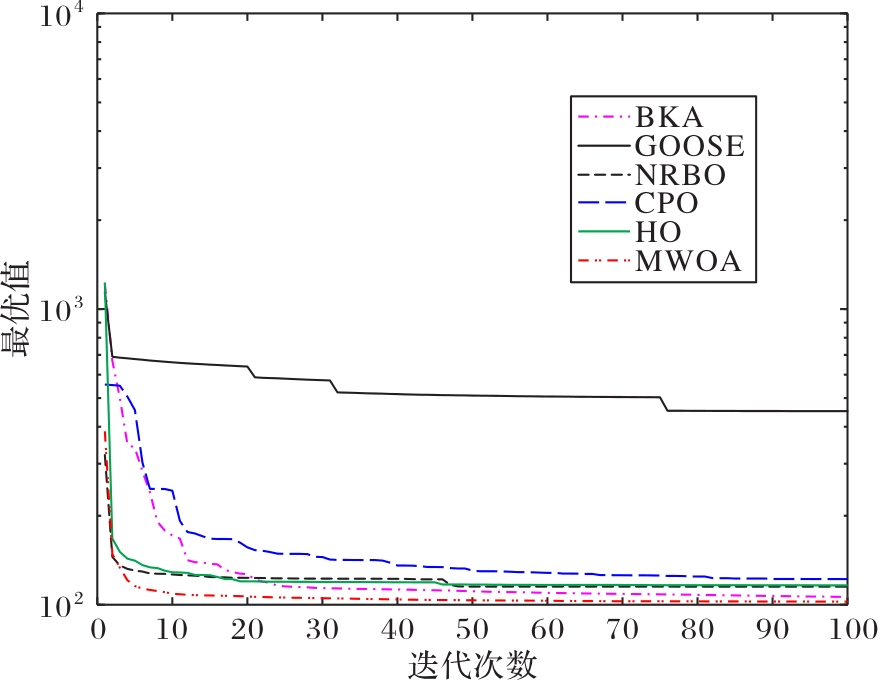
Fig. 6 Comparison of different algorithms’ convergence curves
| 参数 | BKA | GOOSE | NRBO | CPO | HO | MWOA |
|---|---|---|---|---|---|---|
| Exploitation | 50.69 | 5.42 | 18.93 | 80.18 | 90.04 | 7.36 |
| Exploration | 49.31 | 94.58 | 81.07 | 19.82 | 9.96 | 92.64 |
Tab. 4 Exploration and exploitation results of different algorithms
| 参数 | BKA | GOOSE | NRBO | CPO | HO | MWOA |
|---|---|---|---|---|---|---|
| Exploitation | 50.69 | 5.42 | 18.93 | 80.18 | 90.04 | 7.36 |
| Exploration | 49.31 | 94.58 | 81.07 | 19.82 | 9.96 | 92.64 |
| 1 | PHUNG M D, HA Q P. Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization [J]. Applied Soft Computing, 2021, 107: No.107376. |
| 2 | SHAO S, PENG Y, HE C, et al. Efficient path planning for UAV formation via comprehensively improved particle swarm optimization[J]. ISA Transactions, 2020, 97: 415-430. |
| 3 | 孙鉴,马宝全,吴隹伟,等. 地震场景下无人机群路径规划与任务分配均衡联合优化[J]. 计算机应用, 2024, 44(10): 3232-3239. |
| SUN J, MA B Q, WU Z W, et al. Joint optimization of UAV swarm path planning and task allocation balance in earthquake scenarios [J]. Journal of Computer Applications, 2024, 44(10): 3232-3239. | |
| 4 | 黄书召,田军委,乔路,等. 基于改进遗传算法的无人机路径规划[J]. 计算机应用, 2021, 41(2):390-397. |
| HUANG S Z, TIAN J W, QIAO L, et al. Unmanned aerial vehicle path planning based on improved genetic algorithm [J]. Journal of Computer Applications, 2021, 41(2): 390-397. | |
| 5 | 王康,司鹏,陈莉,等. 基于改进沙猫群算法的无人机三维航迹规划[J]. 兵工学报, 2023, 44(11):3382-3393. |
| WANG K, SI P, CHEN L, et al. 3D path planning of unmanned aerial vehicle based on enhanced sand cat swarm optimization algorithm [J]. Acta Armamentarii, 2023, 44 (11): 3382-3393. | |
| 6 | 王飞,杨清平. 基于改进粒子群算法的城市物流无人机路径规划[J]. 科学技术与工程, 2023, 23(30):13187-13194. |
| WANG F, YANG Q P. Route planning of urban logistics unmanned aerial vehicle based on improved particle swarm optimization algorithm[J]. Science Technology and Engineering, 2023, 23(30): 13187-13194. | |
| 7 | 丁敏,夏兴宇,邹永杰,等. 基于改进蝴蝶优化算法的无人机3-D航迹规划方法[J]. 南京航空航天大学学报, 2023, 55(5):851-858. |
| DING M, XIA X Y, ZOU Y J, et al. 3-D track planning method of UAV based on improved butterfly optimization algorithm[J]. Journal of Nanjing University of Aeronautics and Astronautics, 2023, 55(5): 851-858. | |
| 8 | 智瀚宇,贾新春,张学立. 无人机路径规划:一种粒子群和灰狼复合算法[J/OL]. 控制工程 [2024-03-21].. |
| ZHI H Y, JIA X C, ZHANG X L. Path planning of UAVs: a PSO-GWO compound algorithm[J/OL]. Control Engineering [2024-03-21]. . | |
| 9 | 黄鹤,高永博,茹锋,等. 基于自适应黏菌算法优化的无人机三维路径规划[J]. 上海交通大学学报, 2023, 57(10):1282-1291. |
| HUANG H, GAO Y B, RU F, et al. 3D path planning of UAV based on adaptive slime mould algorithm optimization [J]. Journal of Shanghai Jiao Tong University, 2023, 57(10): 1282-1291. | |
| 10 | 隋东,杨振宇,丁松滨,等. 基于EMSDBO算法的无人机三维航迹规划[J]. 系统工程与电子技术, 2024, 46(5): 1756-1766. |
| SUI D, YANG Z Y, DING S B, et al. Three-dimensional path planning of UAV based on EMSDBO algorithm [J]. Systems Engineering and Electronics, 2024, 46(5): 1756-1766. | |
| 11 | 黄志锋,刘媛华. 基于改进哈里斯鹰和B-spline曲线的无人机路径规划研究[J]. 系统仿真学报, 2024, 36(7):1509-1524. |
| HUANG Z F, LIU Y H. UAV path planning based on improved Harris hawk algorithm and B-spline curve [J]. Journal of System Simulation, 2024, 36(7):1509-1524. | |
| 12 | 黄志锋,刘媛华. 基于改进狮群算法的城市无人机低空路径规划[J]. 信息与控制, 2023, 52(6):747-757. |
| HUANG Z F, LIU Y H. Low altitude path planning of urban UAV based on improved lion swarm optimization [J]. Information and Control, 2023, 52(6): 747-757. | |
| 13 | 李高扬,黎向锋,赵康,等. 全粒子推动野马优化算法的无人机三维路径规划[J]. 系统仿真学报, 2024, 36(3): 595-607. |
| LI G Y, LI X F, ZHAO K, et al. Three-dimensional path planning of UAV based on all particles driving wild horse optimizer algorithm[J]. Journal of System Simulation, 2024, 36(3): 595-607. | |
| 14 | 周文娟,张超群,汤卫东,等. 一种新的基于强化学习改进SAR的无人机路径规划[J]. 控制与决策, 2024, 39(4): 1203-1211. |
| ZHOU W J, ZHANG C Q, TANG W D, et al. A novel modified search and rescue optimization algorithm based on reinforcement learning for UAV path planning [J]. Control and Decision, 2024, 39(4): 1203-1211. | |
| 15 | 黄鹤,李潇磊,杨澜,等. 引入改进蝠鲼觅食优化算法的水下无人航行器三维路径规划[J]. 西安交通大学学报, 2022, 56(7):9-18. |
| HUANG H, LI X L, YANG L, et al. Three dimensional path planning of unmanned underwater vehicle based on improved manta ray foraging optimization algorithm [J]. Journal of Xi’an Jiaotong University, 2022, 56(7): 9-18. | |
| 16 | 戚远航,黄子峻,曾楚祥,等. 头脑风暴优化算法求解带转角能耗多无人机路径规划问题[J]. 计算机应用研究, 2022, 39(1):177-182. |
| QI Y H, HUANG Z J, ZENG C X, et al. Brain storm optimization algorithm for multi-UAV path planning with angular energy consumption [J]. Application Research of Computers, 2022, 39(1): 177-182. | |
| 17 | 胡锟,张亮. 罚函数凸优化迭代算法及在无人机路径规划中的应用[J]. 计算机应用研究, 2021, 38(3):725-728. |
| HU K, ZHANG L. Penalty function convex optimization iterative algorithm and its application in UAV path planning [J]. Application Research of Computers, 2021, 38(3): 725-728. | |
| 18 | 杨旭,王锐,张涛. 面向无人机集群路径规划的智能优化算法综述[J]. 控制理论与应用, 2020, 37(11):2291-2302. |
| YANG X, WANG R, ZHANG T. Review of unmanned aerial vehicle swarm path planning based on intelligent optimization [J]. Control Theory and Applications, 2020, 37(11): 2291-2302. | |
| 19 | 宋阿妮,包贤哲. 精英扩散蚁群优化算法求解运输无人机三维路径规划[J]. 计算机工程与科学, 2021, 43(10):1891-1900. |
| SONG A N, BAO X Z. An elite diffusion ant colony optimization algorithm for solving 3D path planning of transportation UAV [J]. Computer Engineering and Science, 2021, 43(10): 1891-1900. | |
| 20 | 白杰,杨根科,潘常春,等. 基于改进分散搜索算法的无人机路径规划[J]. 上海交通大学学报, 2011, 45(2):173-178. |
| BAI J, YANG G K, PAN C C, et al. A revised scatter search algorithm for path planning of multiple UAVs [J]. Journal of Shanghai Jiao Tong University, 2011, 45(2): 173-178. | |
| 21 | MIRJALILI S, LEWIS A. The whale optimization algorithm [J]. Advances in Engineering Software, 2016, 95: 51-67. |
| 22 | 杨启文,蔡亮,薛云灿. 差分进化算法综述[J]. 模式识别与人工智能, 2008, 21(4):506-513. |
| YANG Q W, CAI L, XUE Y C. A survey of differential evolution algorithms [J]. Pattern Recognition and Artificial Intelligence, 2008, 21(4): 506-513. | |
| 23 | KENNEDY J, EBERHART R. Particle swarm optimization [C]// Proceedings of the 1995 International Conference on Neural Networks — Volume 4. Piscataway: IEEE, 1995: 1942-1948. |
| 24 | HEIDARI A A, MIRJALILI S, FARIS H, et al. Harris hawks optimization: algorithm and applications [J]. Future Generation Computer Systems, 2019, 97: 849-872. |
| 25 | ZHAO W, WANG L, MIRJALILI S. Artificial hummingbird algorithm: a new bio-inspired optimizer with its engineering applications [J]. Computer Methods in Applied Mechanics and Engineering, 2022, 388: No.114194. |
| 26 | 黄飞,吴泽忠. 基于阈值控制的一种改进鲸鱼算法[J]. 系统工程, 2020, 38(2):133-148. |
| HUANG F, WU Z Z. An improved whale optimization algorithm based on threshold control [J]. Systems Engineering, 2020, 38(2):133-148. | |
| 27 | 吴泽忠,宋菲. 基于改进螺旋更新位置模型的鲸鱼优化算法[J]. 系统工程理论与实践, 2019, 39(11):2928-2944. |
| WU Z Z, SONG F. Whale optimization algorithm based on improved spiral update position model [J]. Systems Engineering — Theory and Practice, 2019, 39(11): 2928-2944. | |
| 28 | WANG J, WANG W C, HU X X, et al. Black-winged kite algorithm: a nature-inspired meta-heuristic for solving benchmark functions and engineering problems [J]. Artificial Intelligence Review, 2024, 57(4): No.98. |
| 29 | HAMAD R K, RASHID T A. GOOSE algorithm: a powerful optimization tool for real-world engineering challenges and beyond[EB/OL]. [2023-12-03]. . |
| 30 | SOWMYA R, PREMKUMAR M, JANGIR P. Newton-Raphson-based optimizer: a new population-based metaheuristic algorithm for continuous optimization problems [J]. Engineering Applications of Artificial Intelligence, 2024, 128: No.107532. |
| 31 | ABDEL-BASSET M, MOHAMED R, ABOUHAWWASH M. Crested Porcupine Optimizer: a new nature-inspired metaheuristic[J]. Knowledge-Based Systems, 2024, 284: No.111257. |
| 32 | AMIRI M H, MEHRABI HASHJIN N, MONTAZERI M, et al. Hippopotamus optimization algorithm: a novel nature-inspired optimization algorithm [J]. Scientific Reports, 2024, 14: No.5032. |
| [1] | Lingxia MU, Zhengjun ZHOU, Ban WANG, Youmin ZHANG, Xianghong XUE, Kaikai NING. Formation obstacle-avoidance and reconfiguration method for multiple UAVs [J]. Journal of Computer Applications, 2024, 44(9): 2938-2946. |
| [2] | Qiangkui LENG, Xuezi SUN, Xiangfu MENG. Oversampling method for imbalanced data based on sample potential and noise evolution [J]. Journal of Computer Applications, 2024, 44(8): 2466-2475. |
| [3] | Le YANG, Damin ZHANG, Qing HE, Jiaxin DENG, Fengqin ZUO. Application of improved hunter-prey optimization algorithm in WSN coverage [J]. Journal of Computer Applications, 2024, 44(8): 2506-2513. |
| [4] | Runze TIAN, Yulong ZHOU, Hong ZHU, Gang XUE. Local information based path selection algorithm for service migration [J]. Journal of Computer Applications, 2024, 44(7): 2168-2174. |
| [5] | Zhiqiang ZHENG, Haibin DUAN. Short-range UAV air combat maneuver decision-making via finite tolerance pigeon-inspired optimization [J]. Journal of Computer Applications, 2024, 44(5): 1401-1407. |
| [6] | Fengfeng WEI, Weineng CHEN. Distributed data-driven evolutionary computation for multi-constrained optimization [J]. Journal of Computer Applications, 2024, 44(5): 1393-1400. |
| [7] | Tianyu HUANG, Yuanxing LI, Hao CHEN, Zijia GUO, Mingjun WEI. User cluster partitioning method based on weighted fuzzy clustering in ground-air collaboration scenarios [J]. Journal of Computer Applications, 2024, 44(5): 1555-1561. |
| [8] | Rui TANG, Shibo YUE, Ruizhi ZHANG, Chuan LIU, Chuanlin PANG. Energy efficiency optimization mechanism for UAV-assisted and non-orthogonal multiple access-enabled data collection system [J]. Journal of Computer Applications, 2024, 44(4): 1209-1218. |
| [9] | Meiyu CAI, Runzhe ZHU, Fei WU, Kaiyu ZHANG, Jiale LI. Cross-view matching model based on attention mechanism and multi-granularity feature fusion [J]. Journal of Computer Applications, 2024, 44(3): 901-908. |
| [10] | Huzhen GAO, Changping DU, Yao ZHENG. Gimbal system control algorithm of unmanned aerial vehicle based on extended state observer [J]. Journal of Computer Applications, 2024, 44(2): 604-610. |
| [11] | Yawei HUANG, Xuezhong QIAN, Wei SONG. Improved differential evolution algorithm based on dual-archive population size adaptive method [J]. Journal of Computer Applications, 2024, 44(12): 3844-3853. |
| [12] | Lin WANG, Jingliang LIU, Wuwei WANG. Small target detection method in UAV images based on fusion of dilated convolution and Transformer [J]. Journal of Computer Applications, 2024, 44(11): 3595-3602. |
| [13] | Jian SUN, Baoquan MA, Zhuiwei WU, Xiaohuan YANG, Tao WU, Pan CHEN. Joint optimization of UAV swarm path planning and task allocation balance in earthquake scenarios [J]. Journal of Computer Applications, 2024, 44(10): 3232-3239. |
| [14] | Bo WANG, Hao WANG, Xiaoxin DU, Xiaodong ZHENG, Wei ZHOU. Hybrid dragonfly algorithm based on subpopulation and differential evolution [J]. Journal of Computer Applications, 2023, 43(9): 2868-2876. |
| [15] | Zhongyuan ZHANG, Wei DAI, Guangyu LI, Xiaoqing CHEN, Qibo DENG. Cooperative obstacle avoidance algorithm based on improved artificial potential field and consensus protocol [J]. Journal of Computer Applications, 2023, 43(8): 2644-2650. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||