


Journal of Computer Applications ›› 2025, Vol. 45 ›› Issue (9): 3026-3035.DOI: 10.11772/j.issn.1001-9081.2024091273
• Frontier and comprehensive applications • Previous Articles
Songjian GU1,2, Fuxiang WU2, Xiangyang GAO2, Mengjie YANG3, Yibing ZHAN4, Jun CHENG2( )
)
Received:2024-09-06
Revised:2024-11-29
Accepted:2024-12-02
Online:2025-01-15
Published:2025-09-10
Contact:
Jun CHENG
About author:GU Songjian, born in 1998, M.S. candidate. His research interests include mobile robot control, embedded systems.Supported by:
古松健1,2, 吴福祥2, 高向阳2, 杨梦杰3, 詹忆冰4, 程俊2()
通讯作者:
程俊
作者简介:古松健(1998—),男,广东茂名人,硕士研究生,主要研究方向:移动机器人控制、嵌入式系统基金资助:CLC Number:
Songjian GU, Fuxiang WU, Xiangyang GAO, Mengjie YANG, Yibing ZHAN, Jun CHENG. Trajectory tracking algorithm for mobile robots based on geometric model predictive control[J]. Journal of Computer Applications, 2025, 45(9): 3026-3035.
古松健, 吴福祥, 高向阳, 杨梦杰, 詹忆冰, 程俊. 基于几何模型预测控制的移动机器人轨迹跟踪算法[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 3026-3035.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2024091273
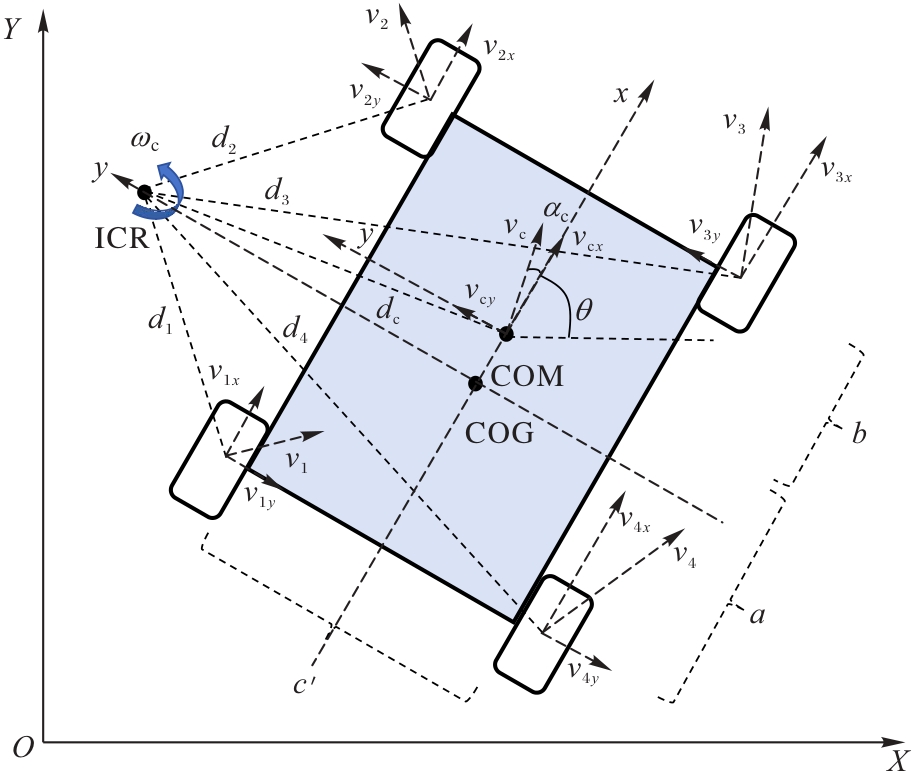
Fig. 1 Kinematics model of FWDMR
| 符号 | 意义 |
|---|---|
| n维向量空间 | |
| 二维空间中的特殊欧几里得群 | |
| 与 | |
| 刚体在平面中移动的状态向量 | |
| 刚体在平面中移动的参考状态向量 | |
| 刚体在平面中移动的速度向量 | |
| 李代数中的速度元素 | |
| 控制输入 | |
| 与 | |
Tab. 1 Symbols used in GMPC framework and their meanings
| 符号 | 意义 |
|---|---|
| n维向量空间 | |
| 二维空间中的特殊欧几里得群 | |
| 与 | |
| 刚体在平面中移动的状态向量 | |
| 刚体在平面中移动的参考状态向量 | |
| 刚体在平面中移动的速度向量 | |
| 李代数中的速度元素 | |
| 控制输入 | |
| 与 | |
| 调整时段 | ||
|---|---|---|
| 探索阶段 | 大幅增加 | 大幅减小 |
| 开发阶段 | 小幅增加 | 小幅减小 |
| 收敛阶段 | 小幅增加 | 小幅减小 |
| 结束阶段 | 大幅减小 | 大幅增加 |
Tab. 2 Rules for updating acceleration factors
| 调整时段 | ||
|---|---|---|
| 探索阶段 | 大幅增加 | 大幅减小 |
| 开发阶段 | 小幅增加 | 小幅减小 |
| 收敛阶段 | 小幅增加 | 小幅减小 |
| 结束阶段 | 大幅减小 | 大幅增加 |
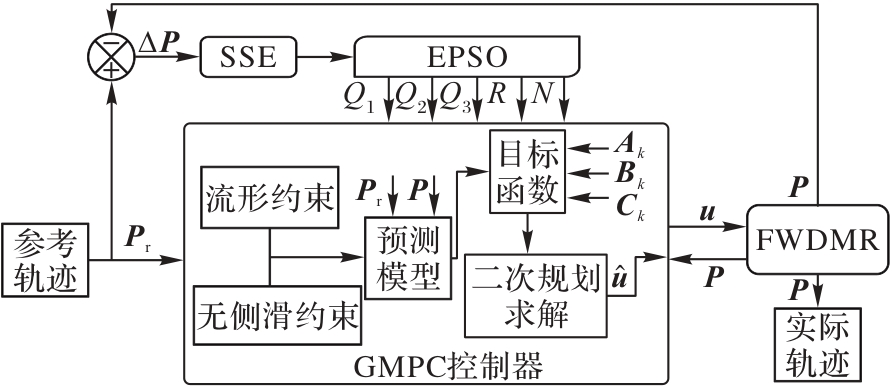
Fig. 2 Principle of EPSO-GMPC algorithm
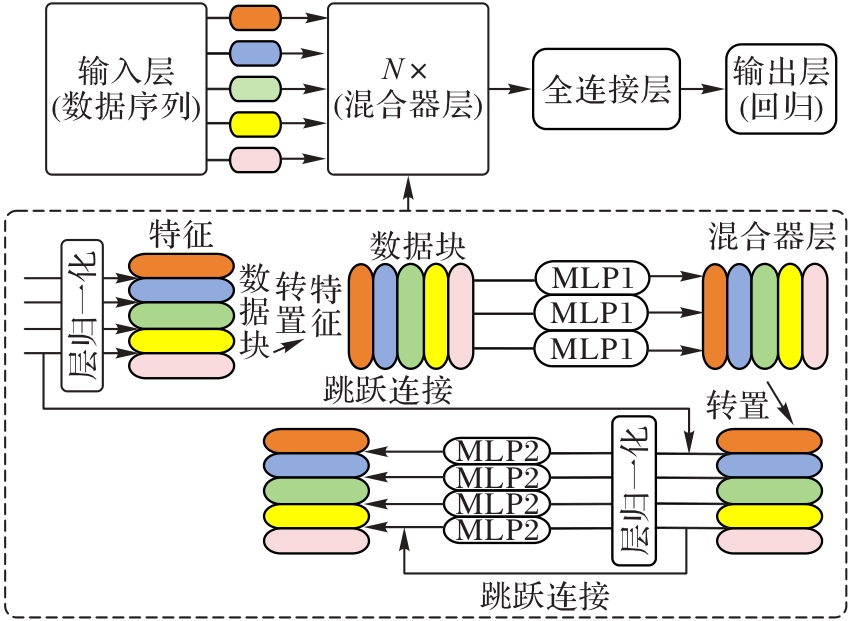
Fig. 3 Mixer algorithm structure
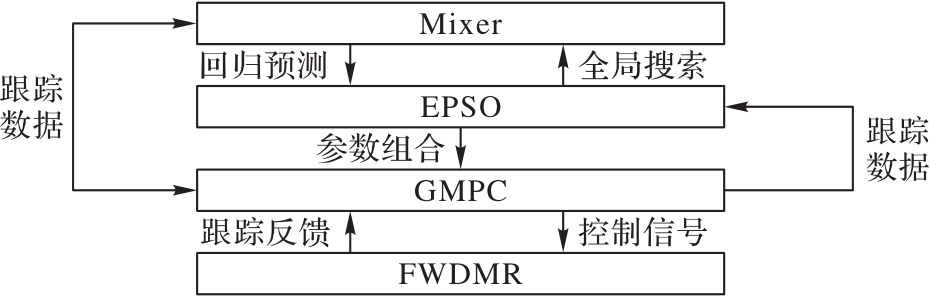
Fig. 4 Framework of EPSO-Mixer trajectory tracking algorithm
| 参数 | 含义 | 数值 |
|---|---|---|
| 未知(决策)变量的数量 | 5 | |
| 粒子数 | 50 | |
| 认知加速因子初始值 | 2 | |
| 社会加速因子初始值 | 2 | |
| 最大迭代次数 | 50或100 | |
| 惯性权重最大值 | 0.99 | |
| 惯性权重最小值 | 0.1 | |
| 阻尼因子 | 0.99 |
Tab. 3 PSO parameter setting
| 参数 | 含义 | 数值 |
|---|---|---|
| 未知(决策)变量的数量 | 5 | |
| 粒子数 | 50 | |
| 认知加速因子初始值 | 2 | |
| 社会加速因子初始值 | 2 | |
| 最大迭代次数 | 50或100 | |
| 惯性权重最大值 | 0.99 | |
| 惯性权重最小值 | 0.1 | |
| 阻尼因子 | 0.99 |
| 算法 | 最大迭代次数 | 最佳适应度 |
|---|---|---|
| 经典PSO | 50 | 4.65×10-3 |
| 100 | 1.70×10-4 | |
| 文献[ | 50 | 3.80×10-2 |
| 100 | 4.04×10-3 | |
| 文献[ | 50 | 7.69×10-2 |
| 100 | 3.39×10-4 | |
| 文献[ | 50 | 1.11×10-5 |
| 100 | 7.11×10-8 | |
| EPSO | 50 | 1.89×10-11 |
| 100 | 1.32×10-20 |
Tab. 4 Comparison of maximum iteration numbers and best fitness values of different algorithms
| 算法 | 最大迭代次数 | 最佳适应度 |
|---|---|---|
| 经典PSO | 50 | 4.65×10-3 |
| 100 | 1.70×10-4 | |
| 文献[ | 50 | 3.80×10-2 |
| 100 | 4.04×10-3 | |
| 文献[ | 50 | 7.69×10-2 |
| 100 | 3.39×10-4 | |
| 文献[ | 50 | 1.11×10-5 |
| 100 | 7.11×10-8 | |
| EPSO | 50 | 1.89×10-11 |
| 100 | 1.32×10-20 |
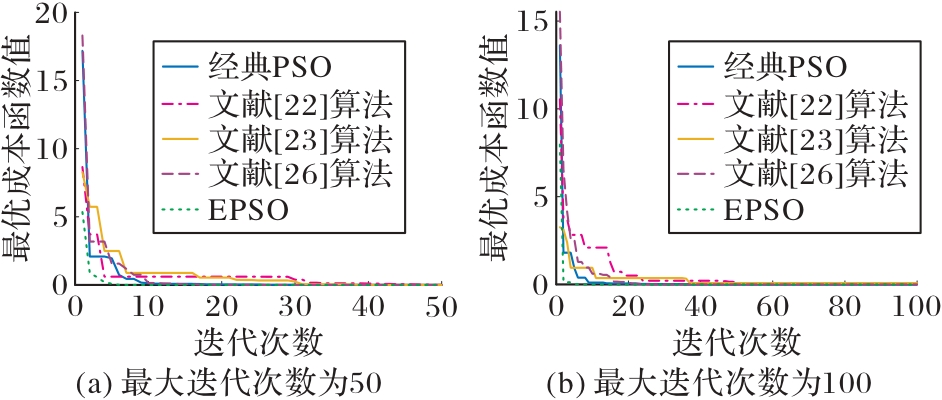
Fig. 5 Optimization results of PSO algorithms for spherical functions
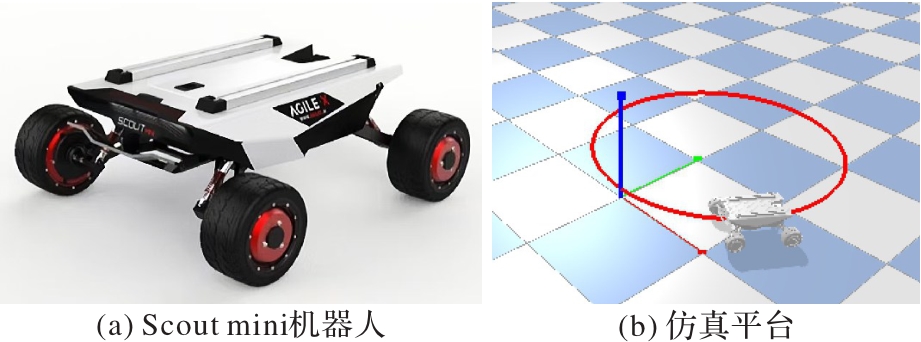
Fig. 6 Simulation object and simulation platform interface
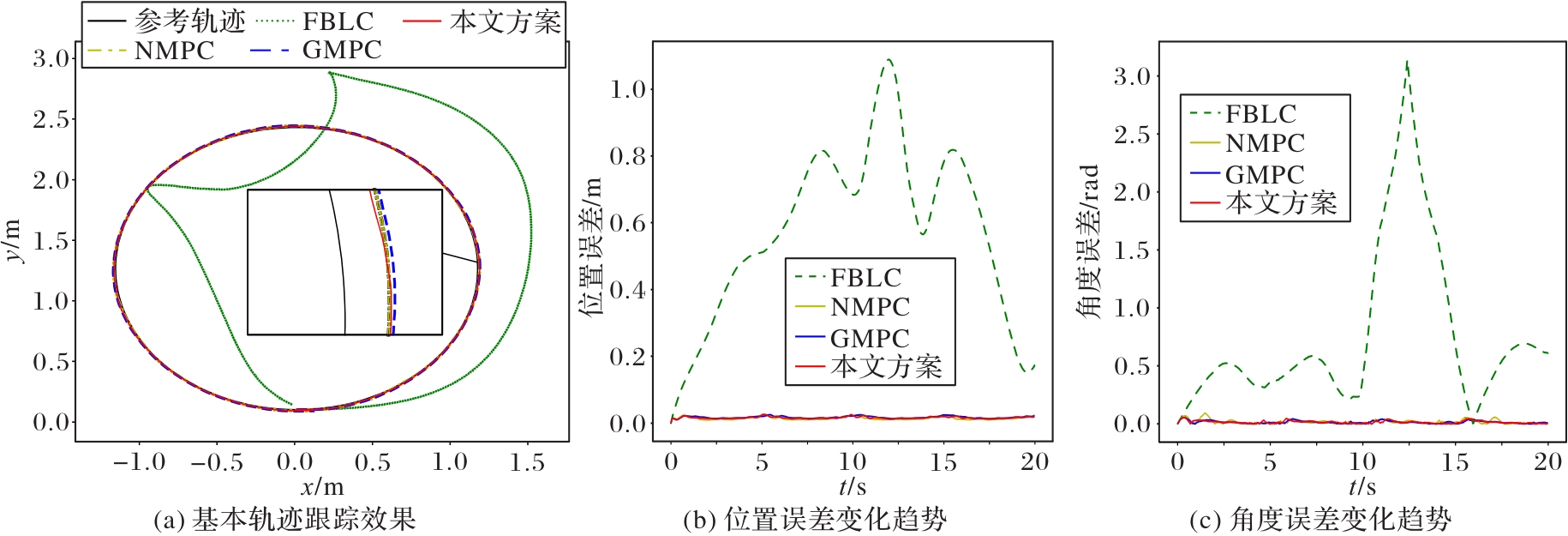
Fig. 7 Tracking performance of various control schemes under conventional condition for circular trajectory
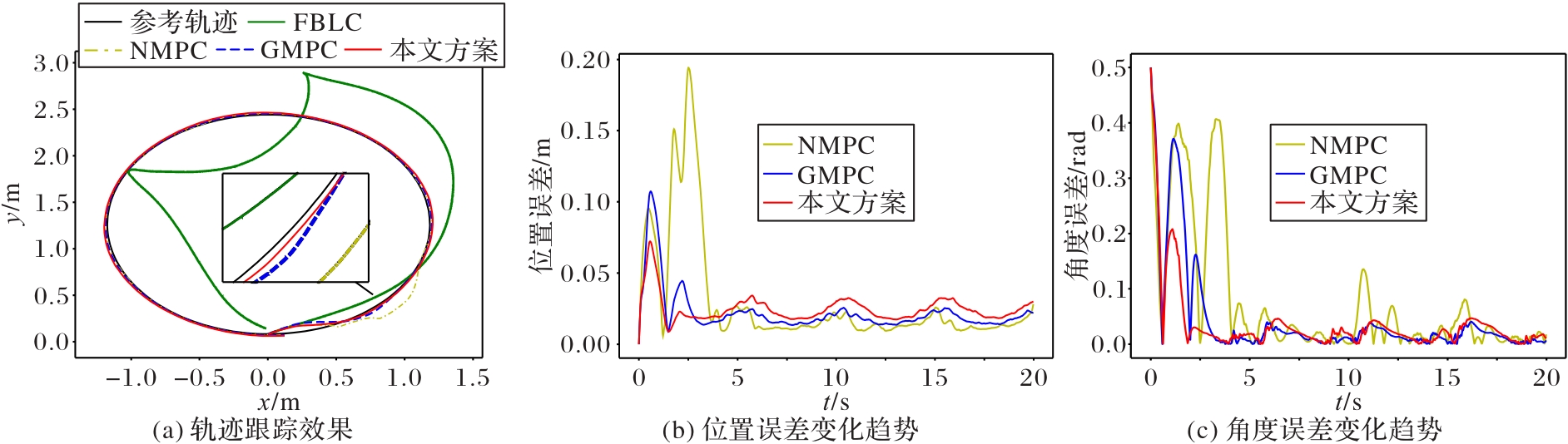
Fig. 8 Tracking performance of various control schemes under 30 ° course shift for circular trajectory
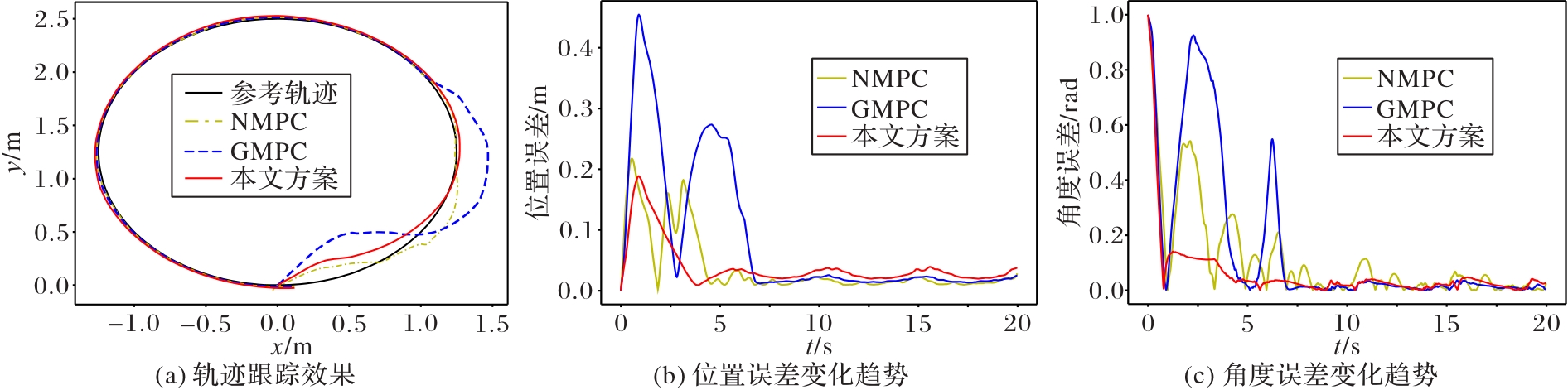
Fig. 9 Tracking performance of various control schemes under 60 ° course shift for circular trajectory
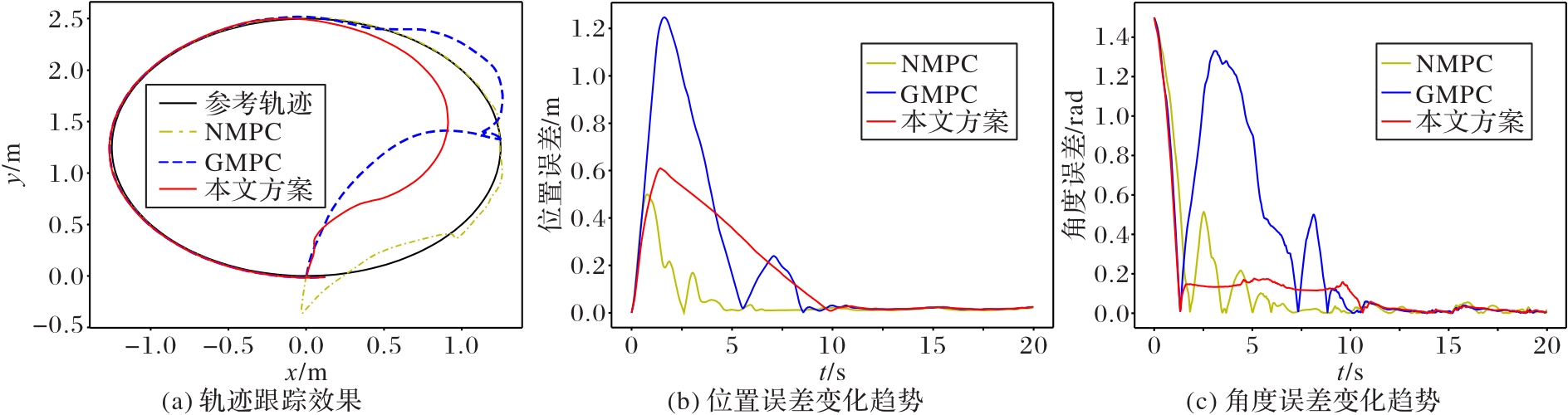
Fig. 10 Tracking performance of various control schemes under 90 ° course shift for circular trajectory
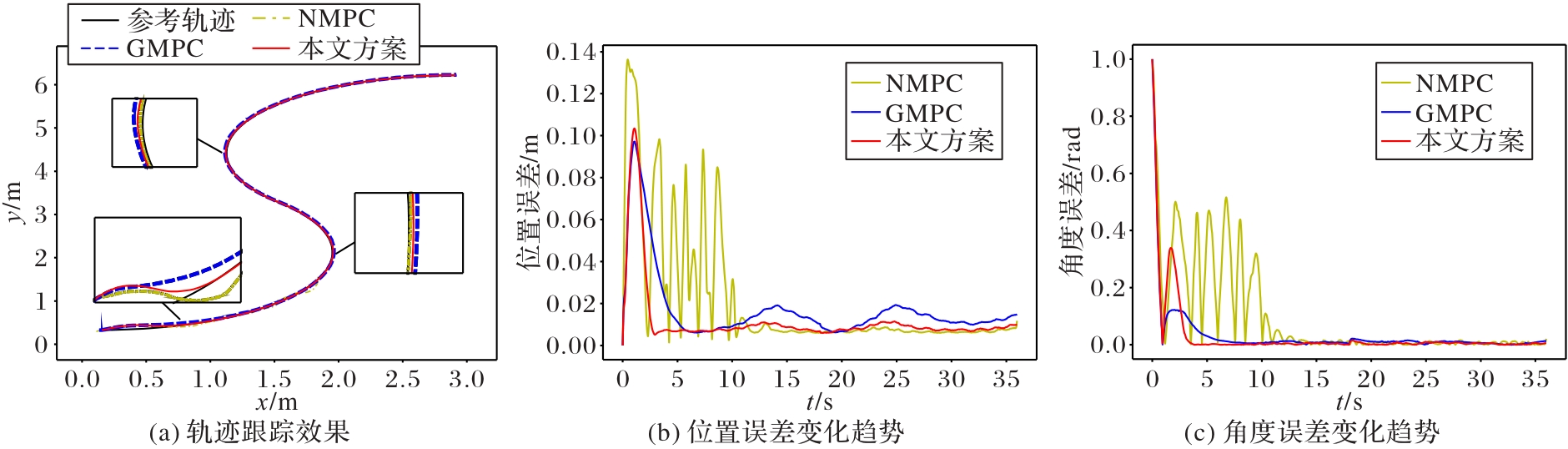
Fig. 11 Tracking performance of various control schemes under 60° course shift for S-shaped trajectory
| 算法 | Q1 | Q2 | Q3 | R | N | SSE | 提升/% |
|---|---|---|---|---|---|---|---|
| BPNN | 19 256 | 15 593 | 1 901 | 0.4 | 17 | 3.464 | 29.7 |
| GA | 22 438 | 19 848 | 2 298 | 0.3 | 15 | 3.275 | 33.6 |
| EPSO | 22 611 | 15 597 | 2 462 | 0.2 | 18 | 3.134 | 36.4 |
| XGBoost[ | 24 445 | 20 438 | 2 410 | 0.5 | 15 | 3.785 | 23.2 |
| gMLP[ | 19 807 | 17 758 | 2 470 | 0.9 | 14 | 3.332 | 30.0 |
| TabNet[ | 22 916 | 14 652 | 2 417 | 0.1 | 14 | 3.389 | 31.3 |
| EPSO-Mixer | 23 606 | 15 325 | 2 446 | 0.6 | 18 | 2.894 | 41.3 |
Tab. 5 Comparison of optimization results of different algorithms
| 算法 | Q1 | Q2 | Q3 | R | N | SSE | 提升/% |
|---|---|---|---|---|---|---|---|
| BPNN | 19 256 | 15 593 | 1 901 | 0.4 | 17 | 3.464 | 29.7 |
| GA | 22 438 | 19 848 | 2 298 | 0.3 | 15 | 3.275 | 33.6 |
| EPSO | 22 611 | 15 597 | 2 462 | 0.2 | 18 | 3.134 | 36.4 |
| XGBoost[ | 24 445 | 20 438 | 2 410 | 0.5 | 15 | 3.785 | 23.2 |
| gMLP[ | 19 807 | 17 758 | 2 470 | 0.9 | 14 | 3.332 | 30.0 |
| TabNet[ | 22 916 | 14 652 | 2 417 | 0.1 | 14 | 3.389 | 31.3 |
| EPSO-Mixer | 23 606 | 15 325 | 2 446 | 0.6 | 18 | 2.894 | 41.3 |
| [1] | PANAHANDEH P, ALIPOUR K, TARVIRDIZADEH B, et al. A self-tuning trajectory tracking controller for wheeled mobile robots[J]. Industrial Robot, 2019, 46(6): 828-838. |
| [2] | LI L, CAO W, YANG H, et al. Trajectory tracking control for a wheel mobile robot on rough and uneven ground [J]. Mechatronics, 2022, 83: No.102741. |
| [3] | 徐俊艳,张培仁. 非完整轮式移动机器人轨迹跟踪控制研究[J]. 中国科学技术大学学报, 2004, 34(3):121-125. |
| XU J Y, ZHANG P R. Research on trajectory tracking control of nonholonomic wheeled mobile robots [J]. Journal of University of Science and Technology of China, 2004, 34(3):121-125. | |
| [4] | DE WIT C C, SORDALEN O J. Exponential stabilization of mobile robots with nonholonomic constraints [C]// Proceedings of the 30th IEEE Conference on Decision and Control — Volume 1. Piscataway: IEEE, 1991: 692-697. |
| [5] | WALLACE R, STENTZ A, THORPE C, et al. First results in robot road-following [C]// Proceedings of the 9th International Joint Conference on Artificial Intelligence — Volume 2. San Francisco: Morgan Kaufmann Publishers Inc., 1985: 1089-1095. |
| [6] | 张扬名,刘国荣,刘洞波,等. 基于Lyapunov方法和快速终端滑模的轨迹跟踪控制[J]. 计算机应用, 2012, 32(11):3243-3246. |
| ZHANG Y M, LIU G R, LIU D B, et al. Trajectory tracking control based on Lyapunov method and terminal sliding mode [J]. Journal of Computer Applications, 2012, 32(11):3243-3246. | |
| [7] | BEGNINI M, BERTOL D W, MARTINS N A. A robust adaptive fuzzy variable structure tracking control for the wheeled mobile robot: simulation and experimental results [J]. Control Engineering Practice, 2017, 64:27-43. |
| [8] | 郑伟勇,李艳玮. 基于前馈-反馈的移动机器人轨迹跟踪控制[J]. 计算机工程与设计, 2017, 38(2):539-543. |
| ZHENG W Y, LI Y W. Trajectory tracking of wheeled mobile robot based on feed-forward and feedback controller [J]. Computer Engineering and Design, 2017, 38(2):539-543. | |
| [9] | 罗蕊,师五喜,李宝全. 受侧滑和滑移影响的移动机器人自抗扰控制[J]. 计算机应用, 2018, 38(5):1517-1522. |
| LUO R, SHI W X, LI B Q. Active disturbance rejection control for mobile robot with skidding and slipping [J]. Journal of Computer Applications, 2018, 38(5):1517-1522. | |
| [10] | 胡映,陈志环. 侧滑和打滑下的轮式移动机器人轨迹跟踪控制[J]. 计算机应用, 2024, 44(7):2294-2300. |
| HU Y, CHEN Z H. Trajectory tracking control of wheeled mobile robots under side-slip and slip [J]. Journal of Computer Applications, 2024, 44(7):2294-2300. | |
| [11] | BOUKENS M, BOUKABOU A. Design of an intelligent optimal neural network-based tracking controller for nonholonomic mobile robot systems [J]. Neurocomputing, 2017, 226: 46-57. |
| [12] | ORIOLO G, DE LUCA A, VENDITTELLI M. WMR control via dynamic feedback linearization: design, implementation, and experimental validation [J]. IEEE Transactions on Control Systems Technology, 2002, 10(6): 835-852. |
| [13] | 李华夏,黄晓蓉,沈安林,等. 基于MPC和PID的脚轮式全向移动平台轨迹跟踪 [J]. 计算机应用, 2024, 44(7):2285-2293. |
| LI H X, HUANG X R, SHEN A L, et al. Trajectory tracking of caster-type omnidirectional mobile platform based on MPC and PID [J]. Journal of Computer Applications, 2024, 44(7):2285-2293. | |
| [14] | BAI G, LIU L, MENG Y, et al. Path tracking of wheeled mobile robots based on dynamic prediction model [J]. IEEE Access, 2019, 7: 39690-39701. |
| [15] | JIAN Z, YAN Z, LEI X, et al. Dynamic control barrier function-based model predictive control to safety-critical obstacle-avoidance of mobile robot [C]// Proceedings of the 2023 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2023: 3679-3685. |
| [16] | WANG K, XU Z, ZHANG K, et al. Lattice piecewise affine approximation of explicit nonlinear model predictive control with application to trajectory tracking of mobile robot [J]. IET Control Theory and Applications, 2024, 18(2): 149-159. |
| [17] | WANG H, LIU B, PING X, et al. Path tracking control for autonomous vehicles based on an improved MPC [J]. IEEE Access, 2019, 7: 161064-161073. |
| [18] | MOUMOUH H, LANGLOIS N, HADDAD M. A novel tuning approach for MPC parameters based on artificial neural network[C]// Proceedings of the IEEE 15th International Conference on Control and Automation. Piscataway: IEEE, 2019: 1638-1643. |
| [19] | RAMASAMY V, SIDHARTHAN R K, KANNAN R, et al. Optimal tuning of model predictive controller weights using genetic algorithm with interactive decision tree for industrial cement kiln process [J]. Processes, 2019, 7(12): No.938. |
| [20] | TANG J, WU S, LAN B, et al. GMPC: geometric model predictive control for wheeled mobile robot trajectory tracking [J]. IEEE Robotics and Automation Letters, 2024, 9(5): 4822-4829. |
| [21] | ARSLAN S, TEMELTAŞ H. Robust motion control of a four wheel drive skid-steered mobile robot [C]// Proceedings of the 7th International Conference on Electrical and Electronics Engineering. Piscataway: IEEE, 2011: Ⅱ-415-Ⅱ-419. |
| [22] | SHI Y, EBERHART R. A modified particle swarm optimizer [C]// Proceedings of the 1998 IEEE International Conference on Evolutionary Computation IEEE World Congress on Computational Intelligence. Piscataway: IEEE, 1998: 69-73. |
| [23] | ZHAN Z H, ZHANG J, LI Y, et al. Adaptive particle swarm optimization [J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2009, 39(6): 1362-1381. |
| [24] | LEE J M. Introduction to Riemannian manifolds, GTM 176 [M]. Cham: Springer, 2018. |
| [25] | TOLSTIKHIN I, HOULSBY N, KOLESNIKOV A, et al. MLP-Mixer: an all-MLP architecture for vision [C]// Proceedings of the 35th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2021: 24261-24272. |
| [26] | KEBBATI Y, PUIG V, AIT-OUFROUKH N, et al. Optimized adaptive MPC for lateral control of autonomous vehicles [C]// Proceedings of the 9th International Conference on Control, Mechatronics and Automation. Piscataway: IEEE, 2021: 95-103. |
| [27] | CHEN T, GUESTRIN C. XGBoost: a scalable tree boosting system [C]// Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining. New York: ACM, 2016: 785-794. |
| [28] | LIU H, DAI Z, SO D R, et al. Pay attention to MLPs [C]// Proceedings of the 35th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2021: 9204-9215. |
| [29] | ARIK S Ö, PFISTER T. TabNet: attentive interpretable tabular learning [C]// Proceedings of the 35th AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2021: 6679-6687. |
| [1] | Suqian WU, Jianguo YAN, Bin YANG, Tao QIN, Ying LIU, Jing YANG. Multi-strategy improved Aquila optimizer and its application in path planning [J]. Journal of Computer Applications, 2025, 45(3): 937-945. |
| [2] | Ying HU, Zhihuan CHEN. Trajectory tracking control of wheeled mobile robots under side-slip and slip [J]. Journal of Computer Applications, 2024, 44(7): 2294-2300. |
| [3] | Huaxia LI, Xiaorong HUANG, Anlin SHEN, Peng JIANG, Yiqiang PENG, Liqi SUI. Trajectory tracking of caster-type omnidirectional mobile platform based on MPC and PID [J]. Journal of Computer Applications, 2024, 44(7): 2285-2293. |
| [4] | Peigen GAO, Bin SUO. Experimental design and staged PSO-Kriging modeling based on weighted hesitant fuzzy set [J]. Journal of Computer Applications, 2024, 44(7): 2144-2150. |
| [5] | Xiaoxin DU, Wei ZHOU, Hao WANG, Tianru HAO, Zhenfei WANG, Mei JIN, Jianfei ZHANG. Survey of subgroup optimization strategies for intelligent algorithms [J]. Journal of Computer Applications, 2024, 44(3): 819-830. |
| [6] | Zhihui GAO, Meng HAN, Shujuan LIU, Ang LI, Dongliang MU. Survey of high utility itemset mining methods based on intelligent optimization algorithm [J]. Journal of Computer Applications, 2023, 43(6): 1676-1686. |
| [7] | Jun LIANG, Zehong HONG, Songsen YU. Image segmentation model based on improved particle swarm optimization algorithm and genetic mutation [J]. Journal of Computer Applications, 2023, 43(6): 1743-1749. |
| [8] | Zhenhua YU, Zhengqi LIU, Ying LIU, Cheng GUO. Feature selection method based on self-adaptive hybrid particle swarm optimization for software defect prediction [J]. Journal of Computer Applications, 2023, 43(4): 1206-1213. |
| [9] | Feng XIANG, Zhongzhi LI, Xi XIONG, Binyong LI. Inverse distance weight interpolation algorithm based on particle swarm local optimization [J]. Journal of Computer Applications, 2023, 43(2): 385-390. |
| [10] | Xuesen MA, Xuemei XU, Gonghui JIANG, Yan QIAO, Tianbao ZHOU. Hybrid adaptive particle swarm optimization algorithm for workflow scheduling [J]. Journal of Computer Applications, 2023, 43(2): 474-483. |
| [11] | Longbao WANG, Yinqi LUAN, Liang XU, Xin ZENG, Shuai ZHANG, Shufang XU. Route planning method of UAV swarm based on dynamic cluster particle swarm optimization [J]. Journal of Computer Applications, 2023, 43(12): 3816-3823. |
| [12] | Chunfeng LIU, Zheng LI, Jufeng WANG. Multi-objective optimization of minicells in distributed factories [J]. Journal of Computer Applications, 2023, 43(12): 3824-3832. |
| [13] | Bing GAO, Ya ZHENG, Jing QIN, Qijie ZOU, Zumin WANG. Network intrusion detection algorithm based on sparrow search algorithm and improved particle swarm optimization algorithm [J]. Journal of Computer Applications, 2022, 42(4): 1201-1206. |
| [14] | Fangxin NIE, Yujia WANG, Xin JIA. Teaching and learning information interactive particle swarm optimization algorithm [J]. Journal of Computer Applications, 2022, 42(3): 874-882. |
| [15] | Jing ZHANG, Aihong ZHU. Optimization method of automatic train operation speed curve based on genetic algorithm and particle swarm optimization [J]. Journal of Computer Applications, 2022, 42(2): 599-605. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||