


Journal of Computer Applications ›› 2026, Vol. 46 ›› Issue (2): 536-545.DOI: 10.11772/j.issn.1001-9081.2024121782
• Multimedia computing and computer simulation • Previous Articles
Xiaowei LA1, Lihua HU1( ), Jianhua HU2, Xiaoling YAO1, Xinbo WANG2
), Jianhua HU2, Xiaoling YAO1, Xinbo WANG2
Received:2024-12-18
Revised:2025-05-14
Accepted:2025-05-15
Online:2025-06-05
Published:2026-02-10
Contact:
Lihua HU
About author:LA Xiaowei, born in 2000, M. S. candidate. His research interests include computer vision, point cloud registration.Supported by:
喇孝伟1, 胡立华1(), 胡建华2, 姚晓玲1, 王欣波2
通讯作者:
胡立华
作者简介:喇孝伟(2000—),男,河北张家口人,硕士研究生,主要研究方向:计算机视觉、点云配准基金资助:CLC Number:
Xiaowei LA, Lihua HU, Jianhua HU, Xiaoling YAO, Xinbo WANG. Low-overlap point cloud registration network integrating position encoding and overlap masks[J]. Journal of Computer Applications, 2026, 46(2): 536-545.
喇孝伟, 胡立华, 胡建华, 姚晓玲, 王欣波. 融合位置编码和重叠掩模的低重叠点云配准网络[J]. 《计算机应用》唯一官方网站, 2026, 46(2): 536-545.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2024121782

Fig. 1 Structure of baseline network
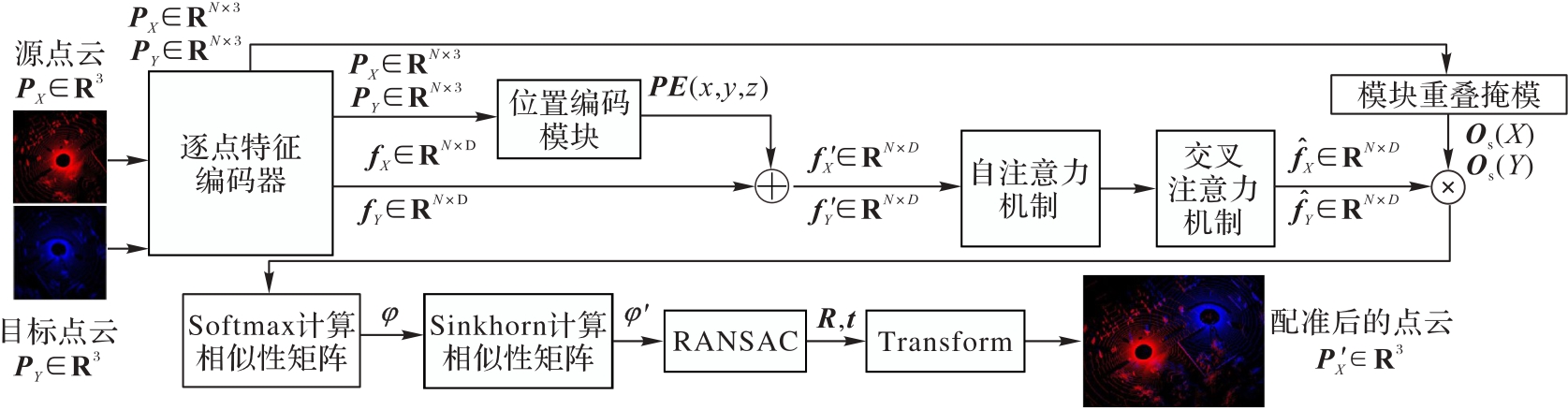
Fig. 2 Framework for low-overlap point cloud registration network
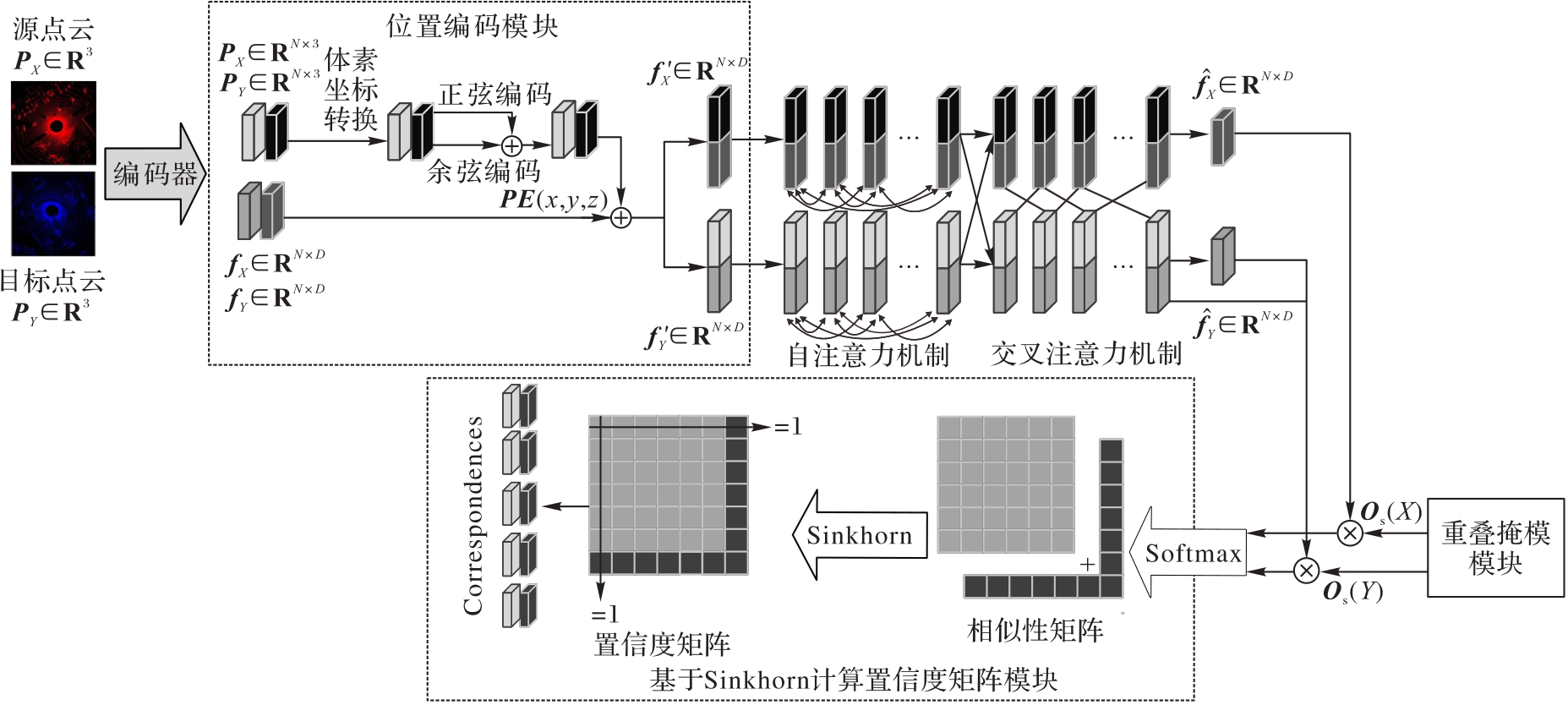
Fig. 3 Structure of core module of point cloud registration network
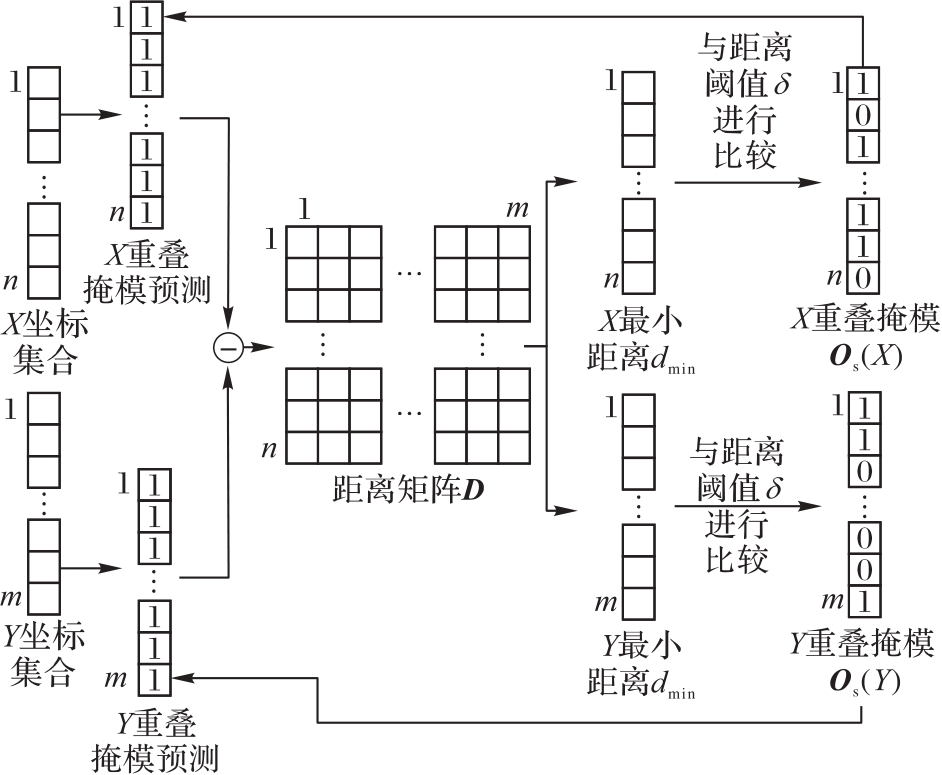
Fig. 4 Structure of overlap mask module
| 数据集 | 子集 | 序列数 | 样本数 |
|---|---|---|---|
| KITTI | 训练集 | 5 | 1 358 |
| 验证集 | 2 | 180 | |
| 测试集 | 2 | 255 | |
| CODD | 训练集 | 78 | 6 129 |
| 验证集 | 14 | 1 339 | |
| 测试集 | 15 | 1 315 |
Tab. 1 Information of KITTI and CODD datasets
| 数据集 | 子集 | 序列数 | 样本数 |
|---|---|---|---|
| KITTI | 训练集 | 5 | 1 358 |
| 验证集 | 2 | 180 | |
| 测试集 | 2 | 255 | |
| CODD | 训练集 | 78 | 6 129 |
| 验证集 | 14 | 1 339 | |
| 测试集 | 15 | 1 315 |
| 配准召回率/% | ||
|---|---|---|
| KITTI | CODD | |
| 0.2 | 97.3 | 94.5 |
| 0.3 | 98.3 | 95.0 |
| 0.4 | 97.0 | 94.1 |
| 0.5 | 96.4 | 93.4 |
Tab. 2 Impact of distance threshold on registration recall on KITTI and CODD datasets
| 配准召回率/% | ||
|---|---|---|
| KITTI | CODD | |
| 0.2 | 97.3 | 94.5 |
| 0.3 | 98.3 | 95.0 |
| 0.4 | 97.0 | 94.1 |
| 0.5 | 96.4 | 93.4 |
| 配准召回率/% | ||
|---|---|---|
| KITTI | CODD | |
| 0.1 | 96.6 | 94.0 |
| 0.2 | 97.4 | 94.7 |
| 0.3 | 98.3 | 95.0 |
| 0.4 | 97.0 | 94.1 |
Tab. 3 Impact of voxel on registration recall on KITTI and CODD datasets
| 配准召回率/% | ||
|---|---|---|
| KITTI | CODD | |
| 0.1 | 96.6 | 94.0 |
| 0.2 | 97.4 | 94.7 |
| 0.3 | 98.3 | 95.0 |
| 0.4 | 97.0 | 94.1 |
| 模型 | RTE/m (↓) | RRE/(°)(↓) | RR/%(↑) |
|---|---|---|---|
| ICP | 6.124 | 5.890 | 8.6 |
| Symmetric ICP | 5.340 | 5.260 | 12.4 |
| FPFH | 0.265 | 0.890 | 97.8 |
| TEASER | 0.190 | 0.750 | 98.6 |
| FCGF | 0.237 | 0.300 | 97.5 |
| DGR | 0.156 | 0.370 | 98.2 |
| 3DFeatNet | 0.259 | 0.250 | 96.0 |
| SpinNet | 0.099 | 0.470 | 99.1 |
| Predator | 0.068 | 0.270 | 99.8 |
| CoFiNet | 0.082 | 0.410 | 99.8 |
| HRegNet | 0.120 | 0.290 | 99.7 |
| RegFormer | 0.086 | 0.232 | 99.8 |
| CoFiI2P | 0.073 | 0.260 | 99.7 |
| 基线网络 | 0.261 | 0.738 | 97.0 |
| 基线网络+ICP | 0.092 | 0.254 | 98.5 |
| 本文网络 | 0.233 | 0.614 | 98.3 |
| 本文网络+ICP | 0.066 | 0.178 | 99.2 |
Tab. 4 Experimental results on KITTI dataset
| 模型 | RTE/m (↓) | RRE/(°)(↓) | RR/%(↑) |
|---|---|---|---|
| ICP | 6.124 | 5.890 | 8.6 |
| Symmetric ICP | 5.340 | 5.260 | 12.4 |
| FPFH | 0.265 | 0.890 | 97.8 |
| TEASER | 0.190 | 0.750 | 98.6 |
| FCGF | 0.237 | 0.300 | 97.5 |
| DGR | 0.156 | 0.370 | 98.2 |
| 3DFeatNet | 0.259 | 0.250 | 96.0 |
| SpinNet | 0.099 | 0.470 | 99.1 |
| Predator | 0.068 | 0.270 | 99.8 |
| CoFiNet | 0.082 | 0.410 | 99.8 |
| HRegNet | 0.120 | 0.290 | 99.7 |
| RegFormer | 0.086 | 0.232 | 99.8 |
| CoFiI2P | 0.073 | 0.260 | 99.7 |
| 基线网络 | 0.261 | 0.738 | 97.0 |
| 基线网络+ICP | 0.092 | 0.254 | 98.5 |
| 本文网络 | 0.233 | 0.614 | 98.3 |
| 本文网络+ICP | 0.066 | 0.178 | 99.2 |
| 模型 | RTE/m (↓) | RRE/(°)(↓) | RR/%(↑) |
|---|---|---|---|
| ICP | 16.136 | 74.842 | 7.5 |
| Symmetric ICP | 15.106 | 73.551 | 12.8 |
| FPFH | 13.802 | 69.593 | 31.3 |
| TEASER | 12.908 | 69.208 | 38.0 |
| FCGF | 1.700 | 0.180 | 91.0 |
| DGR | 0.390 | 1.520 | 94.0 |
| RegFormer | 0.135 | 0.189 | 97.4 |
| CoFiI2P | 0.167 | 0.213 | 97.6 |
| 基线网络 | 0.313 | 0.415 | 92.7 |
| 基线网络+ICP | 0.120 | 0.130 | 97.0 |
| 本文网络 | 0.261 | 0.357 | 95.0 |
| 本文网络+ICP | 0.078 | 0.122 | 97.8 |
Tab. 5 Experimental results on CODD dataset
| 模型 | RTE/m (↓) | RRE/(°)(↓) | RR/%(↑) |
|---|---|---|---|
| ICP | 16.136 | 74.842 | 7.5 |
| Symmetric ICP | 15.106 | 73.551 | 12.8 |
| FPFH | 13.802 | 69.593 | 31.3 |
| TEASER | 12.908 | 69.208 | 38.0 |
| FCGF | 1.700 | 0.180 | 91.0 |
| DGR | 0.390 | 1.520 | 94.0 |
| RegFormer | 0.135 | 0.189 | 97.4 |
| CoFiI2P | 0.167 | 0.213 | 97.6 |
| 基线网络 | 0.313 | 0.415 | 92.7 |
| 基线网络+ICP | 0.120 | 0.130 | 97.0 |
| 本文网络 | 0.261 | 0.357 | 95.0 |
| 本文网络+ICP | 0.078 | 0.122 | 97.8 |
| 模型 | KITTI | CODD | ||||
|---|---|---|---|---|---|---|
| RTE/m (↓) | RRE/(°) | RR/% | RTE/m | RRE/(°) | RR/% | |
| 基线模型 | 0.261 | 0.738 | 97.0 | 0.313 | 0.415 | 91.7 |
| 基线模型+位置编码 | 0.239 | 0.645 | 97.5 | 0.290 | 0.356 | 94.7 |
| 基线模型+重叠掩模 | 0.245 | 0.656 | 97.4 | 0.283 | 0.371 | 94.5 |
| 基线模型+位置编码+重叠掩模 | 0.235 | 0.630 | 97.7 | 0.290 | 0.382 | 95.0 |
| 基线模型+位置编码+重叠掩模+Sinkhorn | 0.233 | 0.614 | 98.3 | 0.261 | 0.357 | 95.0 |
Tab. 6 Ablation experimental results on KITTI and CODD datasets
| 模型 | KITTI | CODD | ||||
|---|---|---|---|---|---|---|
| RTE/m (↓) | RRE/(°) | RR/% | RTE/m | RRE/(°) | RR/% | |
| 基线模型 | 0.261 | 0.738 | 97.0 | 0.313 | 0.415 | 91.7 |
| 基线模型+位置编码 | 0.239 | 0.645 | 97.5 | 0.290 | 0.356 | 94.7 |
| 基线模型+重叠掩模 | 0.245 | 0.656 | 97.4 | 0.283 | 0.371 | 94.5 |
| 基线模型+位置编码+重叠掩模 | 0.235 | 0.630 | 97.7 | 0.290 | 0.382 | 95.0 |
| 基线模型+位置编码+重叠掩模+Sinkhorn | 0.233 | 0.614 | 98.3 | 0.261 | 0.357 | 95.0 |
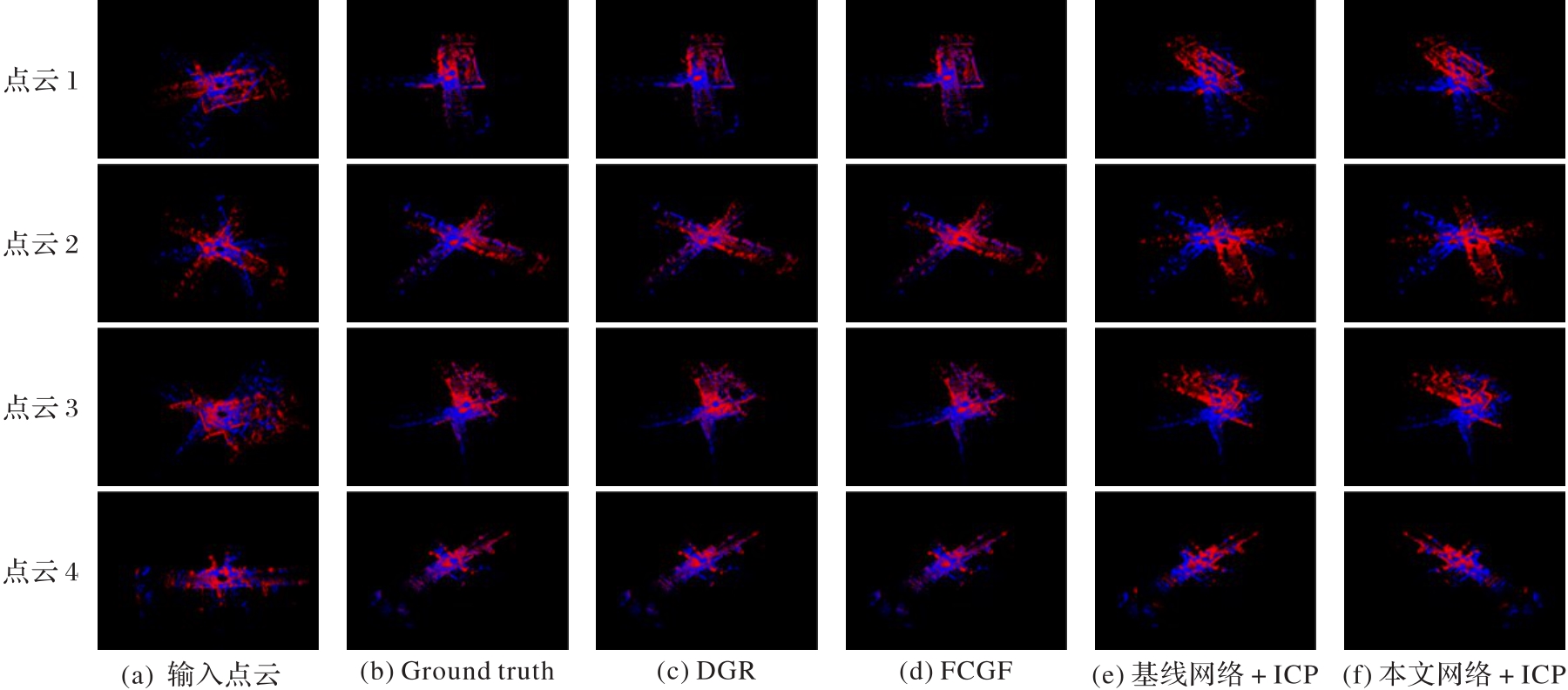
Fig. 5 Visualization results on KITTI dataset
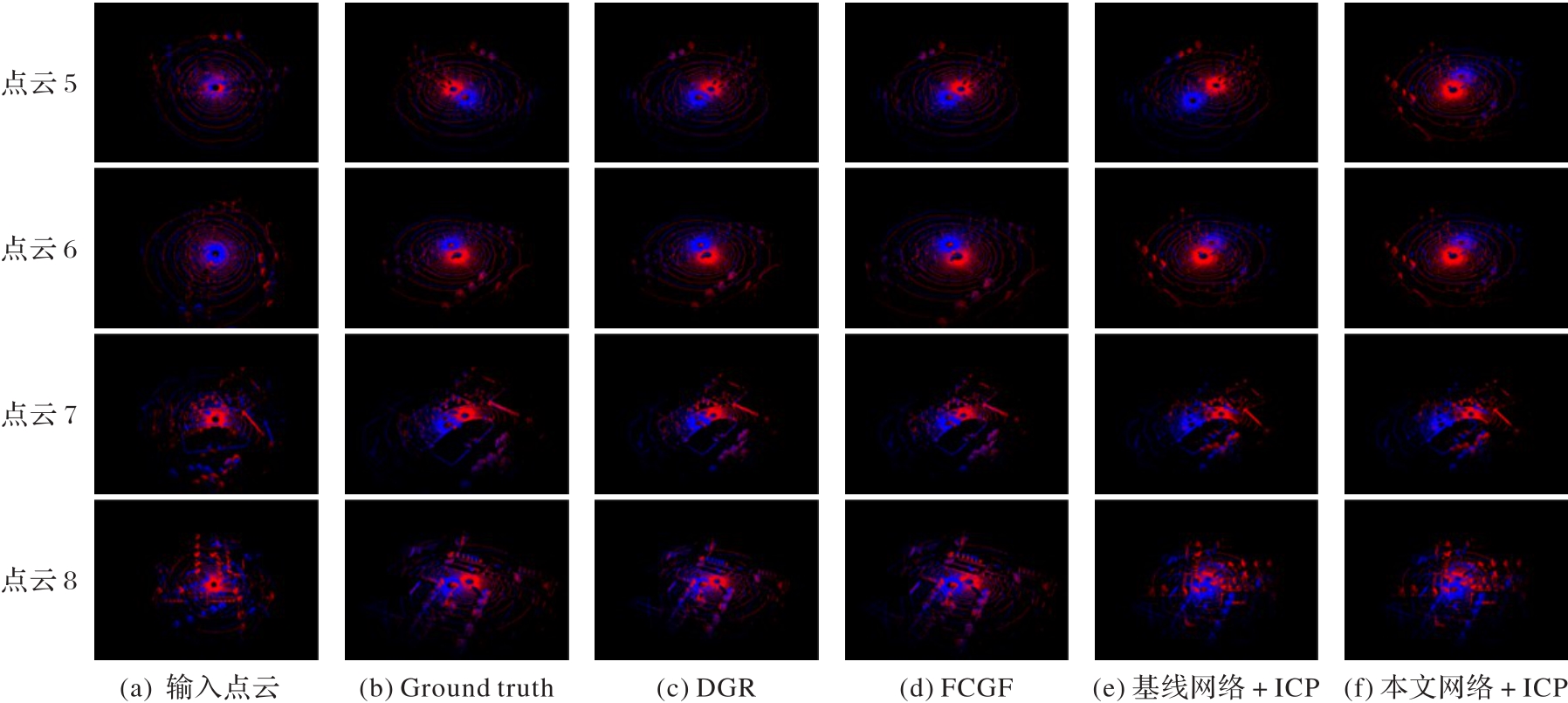
Fig. 6 Visualization results on CODD dataset
| [1] | AZUMA R T. A survey of augmented reality [J]. Presence: Teleoperators and Virtual Environments, 1997, 6(4): 355-385. |
| [2] | CARMIGNIANI J, FURHT B, ANISETTI M, et al. Augmented reality technologies, systems and applications [J]. Multimedia Tools and Applications, 2011, 51(1): 341-377. |
| [3] | 徐帅.基于点云配准的单目视觉多人增强现实机制的研究[D].北京:北京邮电大学, 2020: 22-45. |
| XU S. Research on monocular vision multi-user augmented reality based on point cloud registration [D]. Beijing: Beijing University of Posts and Telecommunications, 2020: 22-45. | |
| [4] | IZADI S, KIM D, HILLIGES O, et al. KinectFusion: real-time 3D reconstruction and interaction using a moving depth camera [C]// Proceedings of the 24th Annual ACM Symposium on User Interface Software and Technology. New York: ACM, 2011: 559-568. |
| [5] | NIEβNER M, ZOLLHÖFER M, IZADI S, et al. Real-time 3D reconstruction at scale using voxel hashing [J]. ACM Transactions on Graphics, 2013, 32(6): No.169. |
| [6] | 刘建斌,马燕,黄慧.基于快速聚合和预配准的三维人脸重建[J].计算机与数字工程, 2024, 52(5): 1477-1481. |
| LIU J B, MA Y, HUANG H. 3D face reconstruction based on fast aggregation and pre-registration [J]. Computer and Digital Engineering, 2024, 52(5): 1477-1481. | |
| [7] | GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving? the KITTI vision benchmark suite [C]// Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2012: 3354-3361. |
| [8] | YURTSEVER E, LAMBERT J, CARBALLO A, et al. A survey of autonomous driving: common practices and emerging technologies [J]. IEEE Access, 2020, 8: 58443-58469. |
| [9] | 柳斌.面向自动驾驶的MEMS激光雷达目标点云配准方法研究[D].吉林:吉林化工学院, 2024: 18-31. |
| LIU B. Research on MEMS LiDAR target point cloud registration method for autonomous driving [D]. Jilin: Jilin Institute of Chemical Technology, 2024: 18-31. | |
| [10] | BESL P J, McKAY N D. Method for registration of 3-D shapes [C]// Proceedings of the SPIE 1611, Sensor Fusion IV: Control Paradigms and Data Structures. Bellingham, WA: SPIE, 1992: 586-606. |
| [11] | RUSU R B, BLODOW N, BEETZ M. Fast Point Feature Histograms (FPFH) for 3D registration [C]// Proceedings of the 2009 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2009: 3212-3217. |
| [12] | YANG J, LI H, JIA Y. Go-ICP: solving 3D registration efficiently and globally optimally [C]// Proceedings of the 2013 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2013: 1457-1464. |
| [13] | RUSINKIEWICZ S. A symmetric objective function for ICP [J]. ACM Transactions on Graphics, 2019, 38(4): No.85. |
| [14] | LIU H, ZHANG Y, LEI L, et al. Hierarchical optimization of 3D point cloud registration [J]. Sensors, 2020, 20(23): No.6999. |
| [15] | YANG H, SHI J, CARLONE L. TEASER: fast and certifiable point cloud registration [J]. IEEE Transactions on Robotics, 2021, 37(2): 314-333. |
| [16] | 朱乾荣,柏艳红,王银,等.基于3D形状上下文特征改进的ICP点云配准算法[J].海洋测绘, 2023, 43(2): 69-73. |
| ZHU Q R, BAI Y H, WANG Y, et al. Improved ICP point cloud registration algorithm based on 3D shape context features [J]. Hydrographic Surveying and Charting, 2023, 43(2): 69-73. | |
| [17] | 唐佳林,林寿南,周壮,等.基于特征变换结合KD树改进ICP的快速点云配准方法[J].计算机科学, 2023, 50(11A): No.230100028. |
| TANG J L, LIN S N, ZHOU Z, et al. Improved ICP fast point cloud registration method based on feature transformation combined with KD tree [J]. Computer Science, 2023, 50(11A): No.230100028. | |
| [18] | AOKI Y, GOFORTH H, SRIVATSAN R A, et al. PointNetLK: robust and efficient point cloud registration using PointNet [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 7156-7165. |
| [19] | QI C R, SU H, MO K, et al. PointNet: deep learning on point sets for 3D classification and segmentation [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 77-85. |
| [20] | LUCAS B D, KANADE T. An iterative image registration technique with an application to stereo vision [C]// Proceedings of the 7th International Joint Conference on Artificial Intelligence — Volume 2. San Francisco: Morgan Kaufmann Publishers Inc., 1981: 674-679. |
| [21] | SARODE V, LI X, GOFORTH H, et al. PCRNet: point cloud registration network using PointNet encoding [EB/OL]. [2024-08-07]. . |
| [22] | WANG Y, SOLOMON J M. Deep closest point: learning representations for point cloud registration [C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 3522-3531. |
| [23] | WANG Y, SUN Y, LIU Z, et al. Dynamic graph CNN for learning on point clouds [J]. ACM Transactions on Graphics, 2019, 38(5): No.146. |
| [24] | ARUN K S, HUANG T S, BLOSTEIN S D. Least-squares fitting of two 3-D point sets [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1987, PAMI-9(5): 698-700. |
| [25] | WANG Y, SOLOMON J. PRNet: self-supervised learning for partial-to-partial registration [C]// Proceedings of the 33rd International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2019: 8814-8826. |
| [26] | YEW Z J, LEE G H. RPM-Net: robust point matching using learned features [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 11821-11830. |
| [27] | SINKHORN R. A relationship between arbitrary positive matrices and doubly stochastic matrices [J]. The Annals of Mathematical Statistics, 1964, 35(2): 876-879. |
| [28] | YUAN Y, BORRMANN D, HOU J, et al. Self-supervised point set local descriptors for point cloud registration [J]. Sensors, 2021, 21(2): No.486. |
| [29] | YEW Z J, LEE G H. 3DFeat-Net: weakly supervised local 3D features for point cloud registration [C]// Proceedings of the 2018 European Conference on Computer Vision, LNCS 11219. Cham: Springer, 2018: 630-646. |
| [30] | AO S, HU Q, YANG B, et al. SpinNet: learning a general surface descriptor for 3D point cloud registration [C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 11748-11757. |
| [31] | YI R, LI J, LUO L, et al. DOPNet: achieving accurate and efficient point cloud registration based on deep learning and multi-level features [J]. Sensors, 2022, 22(21): No.8217. |
| [32] | KANG S, LIAO Y, LI J, et al. CoFiI2P: coarse-to-fine correspondences for image-to-point cloud registration [J]. IEEE Robotics and Automation Letters, 2024, 9(11): 10264-10271. |
| [33] | LU F, CHEN G, LIU Y, et al. HRegNet: a hierarchical network for efficient and accurate outdoor LiDAR point cloud registration [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(10): 11884-11897. |
| [34] | 徐嘉伯.用于低重叠点云配准任务的强泛化全卷积神经网络[D].南昌:南昌大学, 2023: 9-29. |
| XU J B. Strong generalization fully convolutional neural network for low-overlap point cloud registration [D]. Nanchang: Nanchang University, 2023: 9-29. | |
| [35] | LIU J, WANG G, LIU Z, et al. RegFormer: an efficient projection-aware Transformer network for large-scale point cloud registration [C]// Proceedings of the 2023 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2023: 8417-8426. |
| [36] | DENG H, BIRDAL T, ILIC S. PPFNet: global context aware local features for robust 3D point matching [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 195-205. |
| [37] | FISCHER M A, BOLLES R C. Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography [J]. Communications of the ACM, 1981, 24(6): 381-395. |
| [38] | CHOY C, PARK J, KOLTUN V. Fully convolutional geometric features [C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 8957-8965. |
| [39] | CHOY C, DONG W, KOLTUN V. Deep global registration [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 2511-2520. |
| [40] | HUANG S, GOJCIC Z, USVYATSOV M, et al. PREDATOR: registration of 3D point clouds with low overlap [C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 4265-4274. |
| [41] | YU H, LI F, SALEH M, et al. CoFiNet: reliable coarse-to-fine correspondences for robust point cloud registration [C]// Proceedings of the 35th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2021: 23872-23884. |
| [42] | ARNOLD E, MOZAFFARI S, DIANATI M. Fast and robust registration of partially overlapping point clouds [J]. IEEE Robotics and Automation Letters, 2022, 7(2): 1502-1509. |
| [43] | QIN Z, YU H, WANG C, et al. Geometric Transformer for fast and robust point cloud registration [C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 11133-11142. |
| [44] | 刘旭珩,柏正尧,许祝,等.结合注意力机制的多重引导点云配准网络[J].计算机科学, 2024, 51(2): 142-150. |
| LIU X H, BAI Z Y, XU Z, et al. Multi-guided point cloud registration network combined with attention mechanism [J]. Computer Science, 2024, 51(2): 142-150. | |
| [45] | 杜佳锦,柏正尧,刘旭珩,等.融合几何注意力和多尺度特征点云配准网络[J].计算机工程与应用, 2024, 60(12): 234-244. |
| DU J J, BAI Z Y, LIU X H, et al. Fusion of geometric attention and multi-scale feature network for point cloud registration [J]. Computer Engineering and Applications, 2024, 60(12): 234-244. |
| [1] | Hu LUO, Mingshu ZHANG. Rumor detection method based on cross-modal attention mechanism and contrastive learning [J]. Journal of Computer Applications, 2026, 46(2): 361-367. |
| [2] | Yanan LI, Mengyang GUO, Guojun DENG, Yunfeng CHEN, Jianji REN, Yongliang YUAN. Method for life prediction of parallel branching engine based on multi-modal fusion features [J]. Journal of Computer Applications, 2026, 46(1): 305-313. |
| [3] | Fan HE, Li LI, Zhongxu YUAN, Xiu YANG, Dongxuan HAN. Knowledge tracking model based on concept association memory network with graph attention [J]. Journal of Computer Applications, 2026, 46(1): 43-51. |
| [4] | Xiang WANG, Zhixiang CHEN, Guojun MAO. Multivariate time series prediction method combining local and global correlation [J]. Journal of Computer Applications, 2025, 45(9): 2806-2816. |
| [5] | Yilin DENG, Fajiang YU. Pseudo random number generator based on LSTM and separable self-attention mechanism [J]. Journal of Computer Applications, 2025, 45(9): 2893-2901. |
| [6] | Chen LIANG, Yisen WANG, Qiang WEI, Jiang DU. Source code vulnerability detection method based on Transformer-GCN [J]. Journal of Computer Applications, 2025, 45(7): 2296-2303. |
| [7] | Yihan WANG, Chong LU, Zhongyuan CHEN. Multimodal sentiment analysis model with cross-modal text information enhancement [J]. Journal of Computer Applications, 2025, 45(7): 2237-2244. |
| [8] | Xiaoqiang ZHAO, Yongyong LIU, Yongyong HUI, Kai LIU. Batch process quality prediction model using improved time-domain convolutional network with multi-head self-attention mechanism [J]. Journal of Computer Applications, 2025, 45(7): 2245-2252. |
| [9] | Mingfeng YU, Yongbin QIN, Ruizhang HUANG, Yanping CHEN, Chuan LIN. Multi-label text classification method based on contrastive learning enhanced dual-attention mechanism [J]. Journal of Computer Applications, 2025, 45(6): 1732-1740. |
| [10] | Hui LI, Bingzhi JIA, Chenxi WANG, Ziyu DONG, Jilong LI, Zhaoman ZHONG, Yanyan CHEN. Generative adversarial network underwater image enhancement model based on Swin Transformer [J]. Journal of Computer Applications, 2025, 45(5): 1439-1446. |
| [11] | Kunyuan JIANG, Xiaoxia LI, Li WANG, Yaodan CAO, Xiaoqiang ZHANG, Nan DING, Yingyue ZHOU. Boundary-cross supervised semantic segmentation network with decoupled residual self-attention [J]. Journal of Computer Applications, 2025, 45(4): 1120-1129. |
| [12] | Weigang LI, Wenjie CAO, Jinling LI. Multi-stage point cloud completion network based on adaptive neighborhood feature fusion [J]. Journal of Computer Applications, 2025, 45(10): 3294-3301. |
| [13] | Hu WANG, Xiaofeng WANG, Ke LI, Yunjie MA. Federated class-incremental learning method of label semantic embedding with multi-head self-attention [J]. Journal of Computer Applications, 2025, 45(10): 3083-3090. |
| [14] | Jietao LIANG, Bing LUO, Lanhui FU, Qingling CHANG, Nannan LI, Ningbo YI, Qi FENG, Xin HE, Fuqin DENG. Point cloud registration method based on coordinate geometric sampling [J]. Journal of Computer Applications, 2025, 45(1): 214-222. |
| [15] | Pengcheng SONG, Lijun GUO, Rong ZHANG. Weakly supervised video anomaly detection with local-global temporal dependency [J]. Journal of Computer Applications, 2025, 45(1): 240-246. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||