


Journal of Computer Applications ›› 2025, Vol. 45 ›› Issue (10): 3294-3301.DOI: 10.11772/j.issn.1001-9081.2024101437
• Multimedia computing and computer simulation • Previous Articles
Weigang LI1,2, Wenjie CAO1( ), Jinling LI1
), Jinling LI1
Received:2024-10-12
Revised:2024-11-28
Accepted:2024-12-02
Online:2024-12-05
Published:2025-10-10
Contact:
Wenjie CAO
About author:LI Weigang, born in 1977, Ph. D., professor. His research interests include industrial process control, artificial intelligence, machine learning.Supported by:
李维刚1,2, 曹文杰1(), 李金灵1
通讯作者:
曹文杰
作者简介:李维刚(1977—),男,湖北咸宁人,教授,博士,主要研究方向:工业过程控制、人工智能、机器学习基金资助:CLC Number:
Weigang LI, Wenjie CAO, Jinling LI. Multi-stage point cloud completion network based on adaptive neighborhood feature fusion[J]. Journal of Computer Applications, 2025, 45(10): 3294-3301.
李维刚, 曹文杰, 李金灵. 基于自适应邻域特征融合的多阶段点云补全网络[J]. 《计算机应用》唯一官方网站, 2025, 45(10): 3294-3301.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2024101437
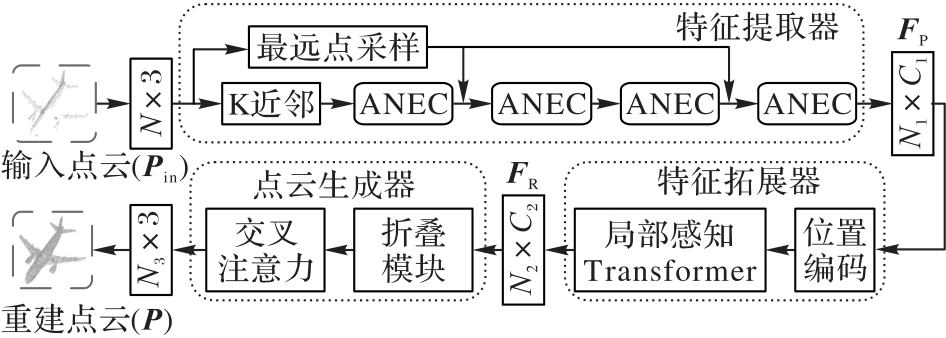
Fig. 1 Overall framework of ANFF-Net

Fig. 2 Target point neighborhood processed by adaptive neighborhood edge convolution
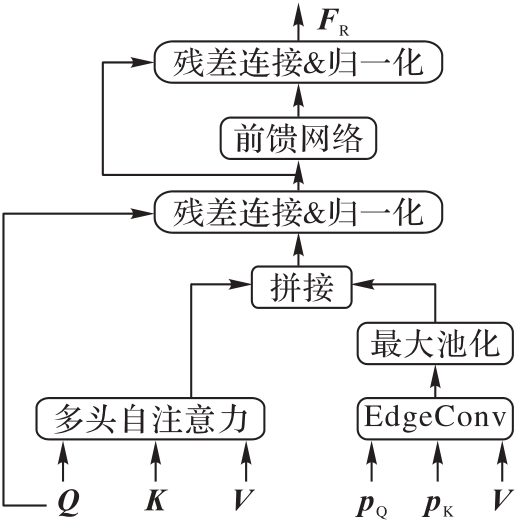
Fig. 3 Local perception Transformer

Fig. 4 Structure of point cloud generator
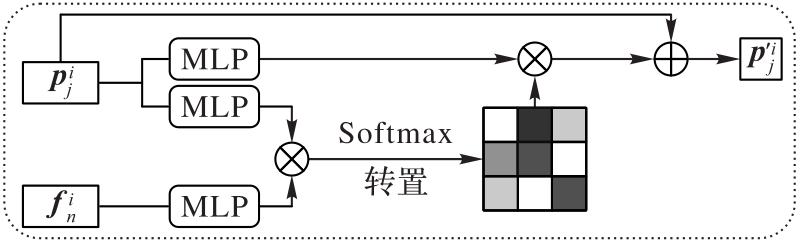
Fig. 5 Structure of cross-attention
| 网络 | 类别 | 平均值 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 飞机 | 橱柜 | 汽车 | 椅子 | 台灯 | 沙发 | 桌子 | 船 | ||
| FoldingNet[ | 8.37 | 13.74 | 11.23 | 14.41 | 14.83 | 14.57 | 12.52 | 11.75 | 12.68 |
| TopNet[ | 7.61 | 13.31 | 10.90 | 13.82 | 14.44 | 14.78 | 11.22 | 11.12 | 12.15 |
| PCN[ | 6.86 | 12.94 | 10.25 | 13.17 | 13.42 | 14.06 | 11.07 | 10.49 | 11.53 |
| GRNet[ | 6.45 | 10.37 | 9.45 | 9.41 | 7.96 | 10.51 | 8.44 | 8.04 | 8.83 |
| PMP-Net[ | 5.65 | 11.24 | 9.64 | 9.51 | 6.95 | 10.83 | 8.72 | 7.25 | 8.73 |
| CRN[ | 4.79 | 9.97 | 8.41 | 9.49 | 8.94 | 10.69 | 7.81 | 8.05 | 8.51 |
| PoinTr[ | 4.75 | 10.47 | 8.68 | 9.39 | 7.75 | 10.93 | 7.78 | 7.29 | 8.38 |
| PMP-Net++[ | 4.39 | 9.96 | 8.53 | 8.09 | 6.06 | 9.82 | 7.17 | 6.52 | 7.56 |
| SnowflakeNet[ | 4.29 | 9.16 | 8.08 | 7.89 | 6.07 | 9.23 | 6.55 | 6.40 | 7.21 |
| GSFormer[ | 4.02 | 9.12 | 7.93 | 7.50 | 5.74 | 8.83 | 6.32 | 6.18 | 6.96 |
| PointAttN[ | 3.87 | 9.01 | 7.63 | 7.43 | 5.90 | 8.68 | 6.32 | 6.09 | 6.86 |
| ProxyFormer[ | 4.01 | 9.01 | 7.88 | 7.11 | 5.35 | 8.77 | 6.03 | 5.98 | 6.77 |
| ANFF-Net | 3.65 | 9.04 | 7.46 | 6.85 | 5.32 | 8.23 | 6.02 | 5.76 | 6.53 |
Tab. 1 Comparison of CD-L1 metrics of different networks on eight categories in PCN dataset
| 网络 | 类别 | 平均值 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 飞机 | 橱柜 | 汽车 | 椅子 | 台灯 | 沙发 | 桌子 | 船 | ||
| FoldingNet[ | 8.37 | 13.74 | 11.23 | 14.41 | 14.83 | 14.57 | 12.52 | 11.75 | 12.68 |
| TopNet[ | 7.61 | 13.31 | 10.90 | 13.82 | 14.44 | 14.78 | 11.22 | 11.12 | 12.15 |
| PCN[ | 6.86 | 12.94 | 10.25 | 13.17 | 13.42 | 14.06 | 11.07 | 10.49 | 11.53 |
| GRNet[ | 6.45 | 10.37 | 9.45 | 9.41 | 7.96 | 10.51 | 8.44 | 8.04 | 8.83 |
| PMP-Net[ | 5.65 | 11.24 | 9.64 | 9.51 | 6.95 | 10.83 | 8.72 | 7.25 | 8.73 |
| CRN[ | 4.79 | 9.97 | 8.41 | 9.49 | 8.94 | 10.69 | 7.81 | 8.05 | 8.51 |
| PoinTr[ | 4.75 | 10.47 | 8.68 | 9.39 | 7.75 | 10.93 | 7.78 | 7.29 | 8.38 |
| PMP-Net++[ | 4.39 | 9.96 | 8.53 | 8.09 | 6.06 | 9.82 | 7.17 | 6.52 | 7.56 |
| SnowflakeNet[ | 4.29 | 9.16 | 8.08 | 7.89 | 6.07 | 9.23 | 6.55 | 6.40 | 7.21 |
| GSFormer[ | 4.02 | 9.12 | 7.93 | 7.50 | 5.74 | 8.83 | 6.32 | 6.18 | 6.96 |
| PointAttN[ | 3.87 | 9.01 | 7.63 | 7.43 | 5.90 | 8.68 | 6.32 | 6.09 | 6.86 |
| ProxyFormer[ | 4.01 | 9.01 | 7.88 | 7.11 | 5.35 | 8.77 | 6.03 | 5.98 | 6.77 |
| ANFF-Net | 3.65 | 9.04 | 7.46 | 6.85 | 5.32 | 8.23 | 6.02 | 5.76 | 6.53 |
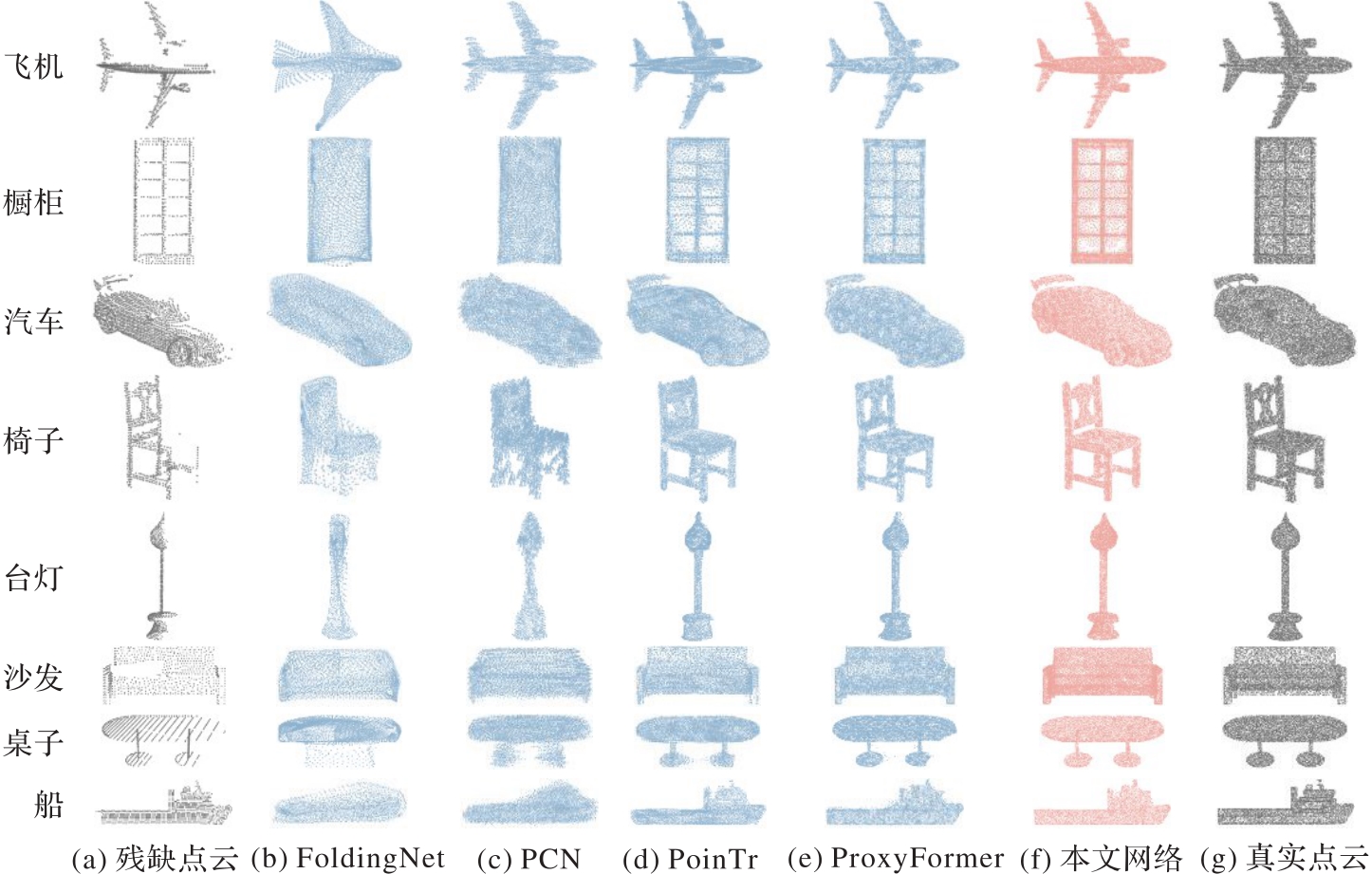
Fig. 6 Visualization of completion results of different networks on PCN dataset
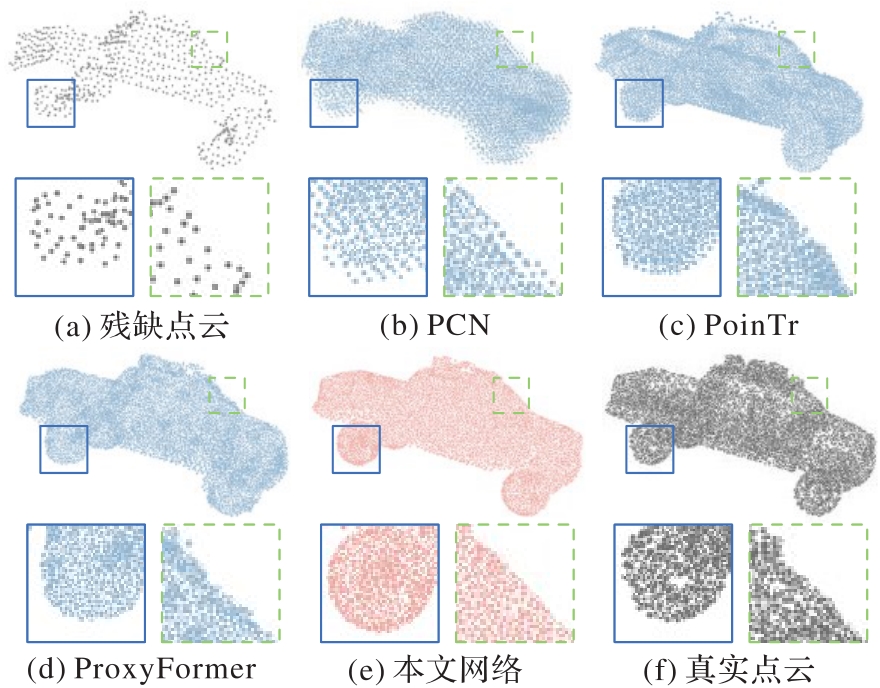
Fig. 7 Visualization of completion results of different networks for car category
| 网络 | 类别 | 难度 | 平均值 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 桌子 | 椅子 | 飞机 | 汽车 | 沙发 | 简单 | 中等 | 困难 | ||
| PF-Net[ | 3.95 | 4.24 | 1.81 | 2.53 | 3.34 | 3.83 | 3.87 | 7.97 | 5.22 |
| TopNet[ | 2.21 | 2.53 | 1.14 | 2.18 | 2.36 | 2.26 | 2.16 | 4.3 | 2.91 |
| PCN[ | 2.13 | 2.29 | 1.02 | 1.85 | 2.06 | 1.94 | 1.96 | 4.08 | 2.66 |
| GRNet[ | 1.63 | 1.88 | 1.01 | 1.64 | 1.72 | 1.35 | 1.71 | 2.85 | 1.97 |
| SnowflakeNet[ | 0.98 | 1.12 | 0.54 | 0.98 | 1.02 | 0.70 | 1.06 | 1.96 | 1.24 |
| PoinTr[ | 0.81 | 0.95 | 0.44 | 0.91 | 0.79 | 0.58 | 0.88 | 1.79 | 1.09 |
| ProxyFormer[ | 0.70 | 0.83 | 0.34 | 0.78 | 0.69 | 0.49 | 0.75 | 1.55 | 0.93 |
| ANFF-Net | 0.65 | 0.71 | 0.33 | 0.75 | 0.66 | 0.49 | 0.70 | 1.33 | 0.84 |
Tab. 2 Comparison of CD-L2 metrics of different networks on five common categories and three difficulty levels in ShapeNet-55 dataset
| 网络 | 类别 | 难度 | 平均值 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 桌子 | 椅子 | 飞机 | 汽车 | 沙发 | 简单 | 中等 | 困难 | ||
| PF-Net[ | 3.95 | 4.24 | 1.81 | 2.53 | 3.34 | 3.83 | 3.87 | 7.97 | 5.22 |
| TopNet[ | 2.21 | 2.53 | 1.14 | 2.18 | 2.36 | 2.26 | 2.16 | 4.3 | 2.91 |
| PCN[ | 2.13 | 2.29 | 1.02 | 1.85 | 2.06 | 1.94 | 1.96 | 4.08 | 2.66 |
| GRNet[ | 1.63 | 1.88 | 1.01 | 1.64 | 1.72 | 1.35 | 1.71 | 2.85 | 1.97 |
| SnowflakeNet[ | 0.98 | 1.12 | 0.54 | 0.98 | 1.02 | 0.70 | 1.06 | 1.96 | 1.24 |
| PoinTr[ | 0.81 | 0.95 | 0.44 | 0.91 | 0.79 | 0.58 | 0.88 | 1.79 | 1.09 |
| ProxyFormer[ | 0.70 | 0.83 | 0.34 | 0.78 | 0.69 | 0.49 | 0.75 | 1.55 | 0.93 |
| ANFF-Net | 0.65 | 0.71 | 0.33 | 0.75 | 0.66 | 0.49 | 0.70 | 1.33 | 0.84 |
| 网络 | Fidelity | MMD |
|---|---|---|
| PCN[ | 2.235 | 1.366 |
| TopNet[ | 5.354 | 0.636 |
| GRNet[ | 0.816 | 0.568 |
| CRN[ | 1.023 | 0.872 |
| PointAttN[ | 0.672 | 0.504 |
| PoinTr[ | 0.000 | 0.526 |
| ProxyFormer[ | 0.000 | 0.508 |
| ANFF-Net | 0.000 | 0.504 |
Tab. 3 Comparison of Fidelity and MMD metrics of different networks on KITTI dataset
| 网络 | Fidelity | MMD |
|---|---|---|
| PCN[ | 2.235 | 1.366 |
| TopNet[ | 5.354 | 0.636 |
| GRNet[ | 0.816 | 0.568 |
| CRN[ | 1.023 | 0.872 |
| PointAttN[ | 0.672 | 0.504 |
| PoinTr[ | 0.000 | 0.526 |
| ProxyFormer[ | 0.000 | 0.508 |
| ANFF-Net | 0.000 | 0.504 |
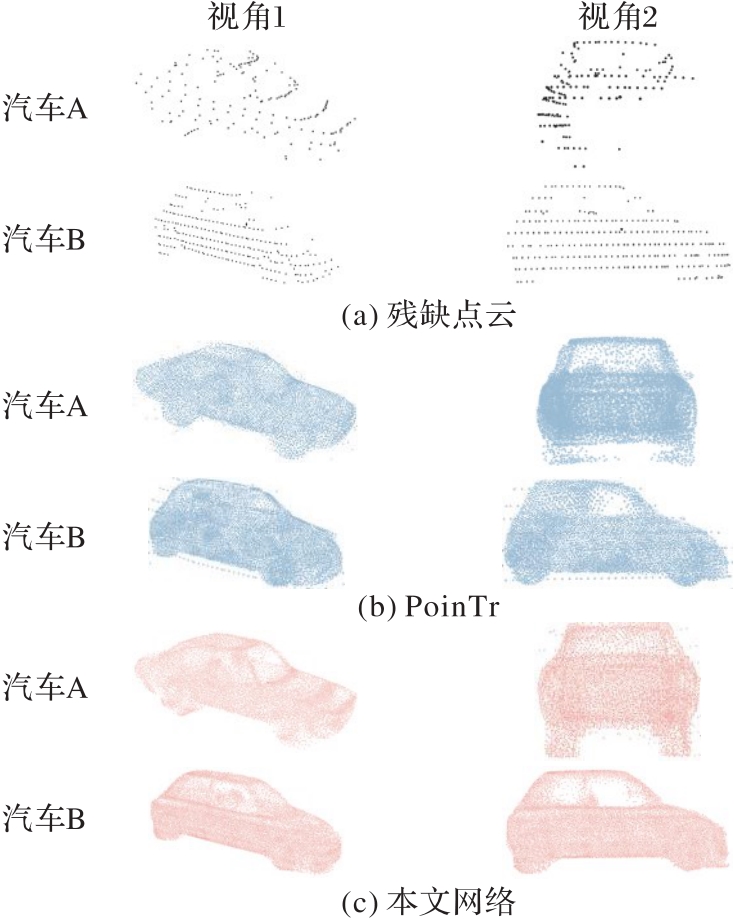
Fig. 8 Visualization of completion results of different networks on KITTI dataset
| 分组 | 消融设置 | CD-L1 |
|---|---|---|
| A | 将ANEC替换为PointNet | 7.16 |
| B | 将ANEC替换为DGCNN | 6.88 |
| C | w/o Cross-attention | 6.80 |
| D | w/o EdgeConv | 6.72 |
| E | 将折叠模块替换为SPD模块 | 6.64 |
| F | 完整ANFF-Net | 6.53 |
Tab. 4 Ablation experimental results
| 分组 | 消融设置 | CD-L1 |
|---|---|---|
| A | 将ANEC替换为PointNet | 7.16 |
| B | 将ANEC替换为DGCNN | 6.88 |
| C | w/o Cross-attention | 6.80 |
| D | w/o EdgeConv | 6.72 |
| E | 将折叠模块替换为SPD模块 | 6.64 |
| F | 完整ANFF-Net | 6.53 |
| 网络 | Params/106 | 浮点运算次数/GFLOPs | CD-L1 |
|---|---|---|---|
| FoldingNet[ | 2.41 | 27.65 | 12.68 |
| PCN[ | 6.84 | 14.69 | 11.53 |
| GRNet[ | 76.71 | 25.88 | 8.83 |
| PoinTr[ | 30.90 | 10.41 | 8.38 |
| ANFF-Net | 32.49 | 15.09 | 6.53 |
Tab. 5 Complexity analysis of different networks on PCN dataset
| 网络 | Params/106 | 浮点运算次数/GFLOPs | CD-L1 |
|---|---|---|---|
| FoldingNet[ | 2.41 | 27.65 | 12.68 |
| PCN[ | 6.84 | 14.69 | 11.53 |
| GRNet[ | 76.71 | 25.88 | 8.83 |
| PoinTr[ | 30.90 | 10.41 | 8.38 |
| ANFF-Net | 32.49 | 15.09 | 6.53 |
| [1] | 陈建文,赵丽丽,任蓝草,等. 深度学习点云质量增强方法综述[J]. 中国图象图形学报, 2023, 28(11): 3295-3319. |
| CHEN J W, ZHAO L L, REN L C, et al. Deep learning-based quality enhancement for 3D point clouds: a survey[J]. Journal of Image and Graphics, 2023, 28(11): 3295-3319. | |
| [2] | 李朝,兰海,魏宪. 基于注意力的毫米波‒激光雷达融合目标检测[J]. 计算机应用, 2021, 41(7): 2137-2144. |
| LI C, LAN H, WEI X. Attention-based object detection with millimeter wave radar-lidar fusion[J]. Journal of Computer Applications, 2021, 41(7): 2137-2144. | |
| [3] | 任柯燕,谷美颖,袁正谦,等. 自动驾驶3D目标检测研究综述[J]. 控制与决策, 2023, 38(4): 865-889. |
| REN K Y, GU M Y, YUAN Z Q, et al. 3D object detection algorithms in autonomous driving: a review[J]. Control and Decision, 2023, 38(4): 865-889. | |
| [4] | 张磊,徐孝彬,曹晨飞,等. 基于动态特征剔除的图像与点云融合的机器人位姿估计方法[J]. 中国激光, 2022, 49(6): No.0610001. |
| ZHANG L, XU X B, CAO C F, et al. Robot pose estimation method based on image and point cloud fusion with dynamic feature elimination[J]. Chinese Journal of Lasers, 2022, 49(6): No.0610001. | |
| [5] | 周静,胡怡宇,胡成玉,等. 基于点云补全和多分辨Transformer的弱感知目标检测方法[J]. 计算机应用, 2023, 43(7): 2155-2165. |
| ZHOU J, HU Y Y, HU C Y, et al. Weakly perceived object detection method based on point cloud completion and multi-resolution Transformer[J]. Journal of Computer Applications, 2023, 43(7): 2155-2165. | |
| [6] | GRAHAM B, ENGELCKE M, VAN DER MAATEN L. 3D semantic segmentation with submanifold sparse convolutional networks[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 9224-9232. |
| [7] | XIE H, YAO H, ZHOU S, et al. GRNet: gridding residual network for dense point cloud completion[C]// Proceedings of the 2020 European Conference on Computer Vision, LNCS 12354. Cham: Springer, 2020: 365-381. |
| [8] | QI C R, SU H, MO K, et al. PointNet: deep learning on point sets for 3D classification and segmentation[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 77-85. |
| [9] | YUAN W, KHOT T, HELD D, et al. PCN: point completion network[C]// Proceedings of the 2018 International Conference on 3D Vision. Piscataway: IEEE, 2018: 728-737. |
| [10] | YANG Y, FENG C, SHEN Y, et al. FoldingNet: point cloud auto-encoder via deep grid deformation[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 206-215. |
| [11] | WANG X, ANG M H, LEE G H. Cascaded refinement network for point cloud completion[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 787-796. |
| [12] | TCHAPMI L P, KOSARAJU V, REZATOFIGHI H, et al. TopNet: structural point cloud decoder[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 383-392. |
| [13] | HUANG Z, YU Y, XU J, et al. PF-Net: point fractal network for 3D point cloud completion[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 7659-7667. |
| [14] | WEN X, XIANG P, HAN Z, et al. PMP-Net++: point cloud completion by Transformer-enhanced multi-step point moving paths[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(1): 852-867. |
| [15] | XIANG P, WEN X, LIU Y S, et al. SnowflakeNet: point cloud completion by snowflake point deconvolution with skip-transformer[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 5479-5489. |
| [16] | ZHAO H, JIANG L, JIA J, et al. Point Transformer[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 16239-16248. |
| [17] | YU X, RAO Y, WANG Z, et al. PoinTr: diverse point cloud completion with geometry-aware Transformers[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 12478-12487. |
| [18] | WANG Y, SUN Y, LIU Z, et al. Dynamic graph CNN for learning on point clouds[J]. ACM Transactions on Graphics, 2019, 38(5): No.146. |
| [19] | WANG J, CUI Y, GUO D, et al. PointAttN: you only need attention for point cloud completion[C]// Proceedings of the 38th AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2024: 5472-5480. |
| [20] | LONG Y, CHEN Z, LU H, et al. GSFormer: geometric-spatial Transformer on point cloud completion[C]// Proceedings of the 2023 IEEE International Conference on Multimedia and Expo. Piscataway: IEEE, 2023: 1175-1180. |
| [21] | LI S, GAO P, TAN X, et al. ProxyFormer: proxy alignment assisted point cloud completion with missing part sensitive Transformer[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 9466-9475. |
| [22] | ZHOU H, FENG Y, FANG M, et al. Adaptive graph convolution for point cloud analysis[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 4945-4954. |
| [23] | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 6000-6010. |
| [24] | WU Z, SONG S, KHOSLA A, et al. 3D ShapeNets: a deep representation for volumetric shapes[C]// Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2015: 1912-1920. |
| [25] | LOSHCHILOV I, HUTTER F. Fixing weight decay regularization in Adam[EB/OL]. [2024-11-24].. |
| [26] | WEN X, XIANG P, HAN Z, et al. PMP-Net: point cloud completion by learning multi-step point moving paths[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 7439-7448. |
| [1] | Yihan WANG, Chong LU, Zhongyuan CHEN. Multimodal sentiment analysis model with cross-modal text information enhancement [J]. Journal of Computer Applications, 2025, 45(7): 2237-2244. |
| [2] | Yuwei DING, Hongbo SHI, Jie LI, Min LIANG. Image denoising network based on local and global feature decoupling [J]. Journal of Computer Applications, 2024, 44(8): 2571-2579. |
| [3] | Li’an CHEN, Yi GUO. Text sentiment analysis model based on individual bias information [J]. Journal of Computer Applications, 2024, 44(1): 145-151. |
| [4] | Jing ZHOU, Yiyu HU, Chengyu HU, Tianjiang WANG. Weakly perceived object detection method based on point cloud completion and multi-resolution Transformer [J]. Journal of Computer Applications, 2023, 43(7): 2155-2165. |
| [5] | Zhixiong ZHENG, Jianhua LIU, Shuihua SUN, Ge XU, Honghui LIN. Aspect-based sentiment analysis model fused with multi-window local information [J]. Journal of Computer Applications, 2023, 43(6): 1796-1802. |
| [6] | Yubin GUO, Xiang WEN, Pan LIU, Ximing LI. Cross-modal person re-identification relation network based on dual-stream structure [J]. Journal of Computer Applications, 2023, 43(6): 1803-1810. |
| [7] | Feiyu LIAN, Liang ZHANG, Jiedong WANG, Yukang JIN, Yu CHAI. Outdoor scene point cloud segmentation model based on graph model and attention mechanism [J]. Journal of Computer Applications, 2023, 43(12): 3911-3917. |
| [8] | Tianhao QIU, Shurong CHEN. EfficientNet based dual-branch multi-scale integrated learning for pedestrian re-identification [J]. Journal of Computer Applications, 2022, 42(7): 2065-2071. |
| [9] | LI Xingfeng, HUANG Yuqing, REN Zhenwen, LI Yihong. Robust multi-view clustering algorithm based on adaptive neighborhood [J]. Journal of Computer Applications, 2021, 41(4): 1093-1099. |
| [10] | LI Huafeng, HUANG Zhangcan, ZHANG Qiang, ZHAN Hang, TAN Qing. Improved pyramid evolution strategy for solving split delivery vehicle routing problem [J]. Journal of Computer Applications, 2021, 41(1): 300-306. |
| [11] | SHI Zhiliang, CAI Wangyue, WANG Guoqiang, XIONG Linjie. Intrinsic shape signature algorithm based on adaptive neighborhood [J]. Journal of Computer Applications, 2020, 40(4): 1151-1156. |
| [12] | YE Shuang, YANG Xiaomin, YAN Bin'yu. Image super-resolution algorithm based on adaptive anchored neighborhood regression [J]. Journal of Computer Applications, 2019, 39(10): 3040-3045. |
| [13] | ZUO Xiangmei, JIA Lijiao, HAN Pengcheng. Hierarchical three-dimensional shape ring feature extraction method [J]. Journal of Computer Applications, 2018, 38(6): 1755-1759. |
| [14] | XIA Jun, LI Yinghua. Delaunay triangulation subdivision algorithm of spherical convex graph and its convergence analysis [J]. Journal of Computer Applications, 2017, 37(12): 3558-3562. |
| [15] | GOU Chengfu, CHEN Bin, ZHAO Xuezhuan, CHEN Gang. Object tracking algorithm based on random sampling consensus estimation [J]. Journal of Computer Applications, 2016, 36(9): 2566-2569. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||