


Journal of Computer Applications ›› 2026, Vol. 46 ›› Issue (5): 1545-1550.DOI: 10.11772/j.issn.1001-9081.2025050711
• Multimedia computing and computer simulation • Previous Articles
Huaze ZHU, Weihao WANG, Mingyu YOU( ), Hongjun ZHOU
), Hongjun ZHOU
Received:2025-06-27
Revised:2025-08-22
Accepted:2025-08-26
Online:2025-09-05
Published:2026-05-10
Contact:
Mingyu YOU
About author:ZHU Huaze, born in 2001, M. S. candidate. His research interests include 3D assembly. Supported by:
朱华泽, 王伟昊, 尤鸣宇(), 周洪钧
通讯作者:
尤鸣宇
作者简介:朱华泽(2001—),男,黑龙江鹤岗人,硕士研究生,主要研究方向:三维装配基金资助:CLC Number:
Huaze ZHU, Weihao WANG, Mingyu YOU, Hongjun ZHOU. 3D part assembly method based on line drawing segmentation[J]. Journal of Computer Applications, 2026, 46(5): 1545-1550.
朱华泽, 王伟昊, 尤鸣宇, 周洪钧. 基于线条图分割的三维部件装配方法[J]. 《计算机应用》唯一官方网站, 2026, 46(5): 1545-1550.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2025050711
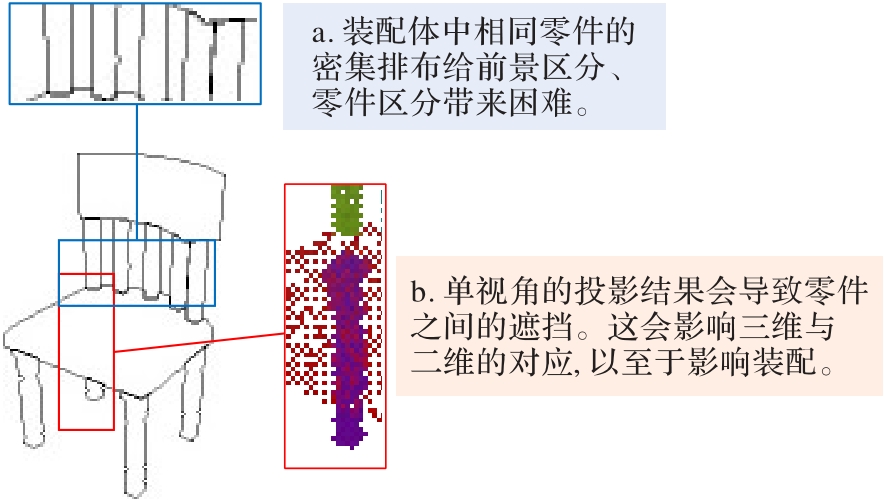
Fig. 1 Task difficulties
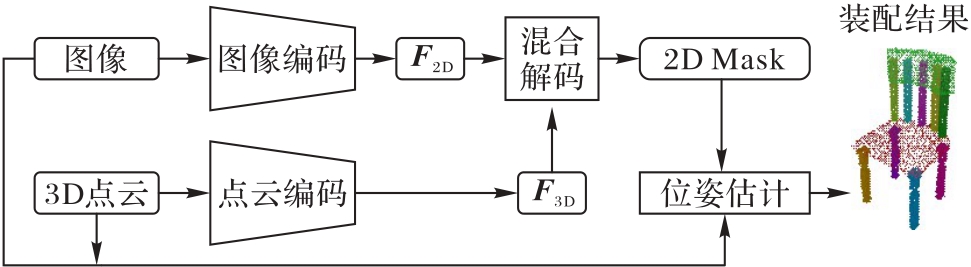
Fig. 2 System model structure
| 方法 | CD | PA/% | ||||
|---|---|---|---|---|---|---|
| 椅子 | 桌子 | 柜子 | 椅子 | 桌子 | 柜子 | |
| 3DHPA† | 0.005 1 | 0.002 8 | 0.003 7 | 64.13 | 64.83 | 55.13 |
| IET† | 0.005 4 | 0.003 5 | 0.003 9 | 62.80 | 61.67 | 54.95 |
| 3DPA | 0.008 7 | 0.003 6 | 0.004 3 | 54.86 | 51.40 | 30.04 |
| 本文方法 | 0.004 8 | 0.002 7 | 0.003 9 | 64.24 | 66.45 | 58.52 |
Tab. 1 Performance comparison of proposed method and baseline methods
| 方法 | CD | PA/% | ||||
|---|---|---|---|---|---|---|
| 椅子 | 桌子 | 柜子 | 椅子 | 桌子 | 柜子 | |
| 3DHPA† | 0.005 1 | 0.002 8 | 0.003 7 | 64.13 | 64.83 | 55.13 |
| IET† | 0.005 4 | 0.003 5 | 0.003 9 | 62.80 | 61.67 | 54.95 |
| 3DPA | 0.008 7 | 0.003 6 | 0.004 3 | 54.86 | 51.40 | 30.04 |
| 本文方法 | 0.004 8 | 0.002 7 | 0.003 9 | 64.24 | 66.45 | 58.52 |
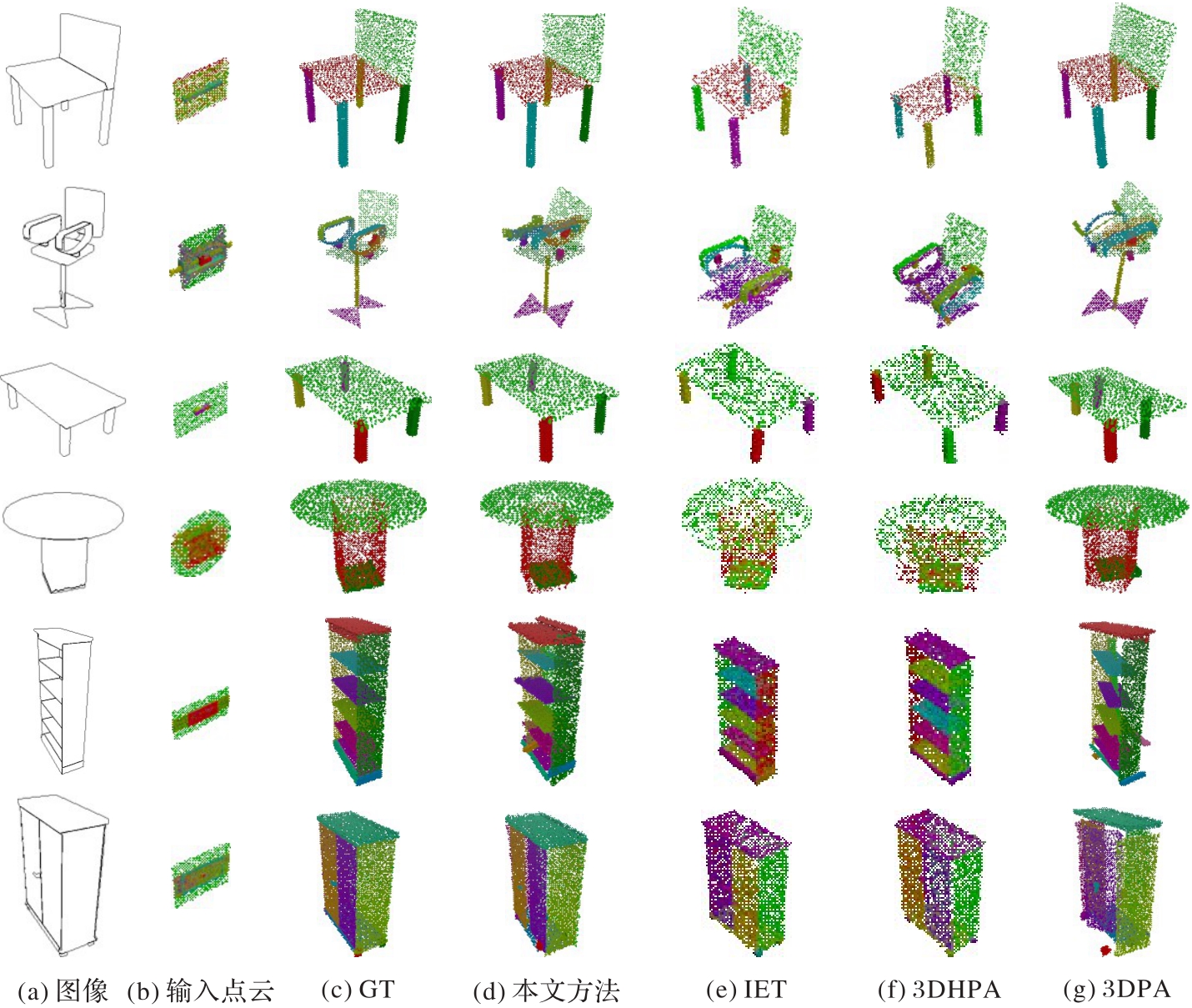
Fig. 3 Some visualization results
| 方法 | MIoU | 方法 | MIoU |
|---|---|---|---|
| 无实例编码 | 0.519 8 | 无自注意力 | 0.540 8 |
| 无L1 | 0.473 3 | 本文方法 | 0.660 9 |
| 无L2 | 0.618 6 |
Tab. 2 Ablation experiments of segmentation network
| 方法 | MIoU | 方法 | MIoU |
|---|---|---|---|
| 无实例编码 | 0.519 8 | 无自注意力 | 0.540 8 |
| 无L1 | 0.473 3 | 本文方法 | 0.660 9 |
| 无L2 | 0.618 6 |
| [1] | FUNKHOUSER T, KAZHDAN M, SHILANE P, et al. Modeling by example[J]. ACM Transactions on Graphics, 2004, 23(3): 652-663. |
| [2] | HUANG J, ZHAN G, FAN Q, et al. Generative 3D part assembly via dynamic graph learning[C]// Proceedings of the 34th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2020: 6315-6326. |
| [3] | IZADINIA H, SHAN Q, SEITZ S M. IM2CAD[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 2422-2431. |
| [4] | DU B, GAO X, HU W, et al. Generative 3D part assembly via part-whole-hierarchy message passing[C]// Proceedings of the 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2024: 20850-20859. |
| [5] | ZHANG R, KONG T, WANG W, et al. 3D part assembly generation with instance encoded Transformer[J]. IEEE Robotics and Automation Letters, 2022, 7(4): 9051-9058. |
| [6] | SHAO L, MIGIMATSU T, BOHG J. Learning to scaffold the development of robotic manipulation skills[C]// Proceedings of the 2020 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2020: 5671-5677. |
| [7] | ZACHARES P A, LEE M A, LIAN W, et al. Interpreting contact interactions to overcome failure in robot assembly tasks[C]// Proceedings of the 2021 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2021: 3410-3417. |
| [8] | WANG H, SRIDHAR S, HUANG J, et al. Normalized object coordinate space for category-level 6D object pose and size estimation[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 2637-2646. |
| [9] | YOON Y, DESOUZA G N, KAK A C. Real-time tracking and pose estimation for industrial objects using geometric features[C]// Proceedings of the 2003 IEEE International Conference on Robotics and Automation — Volume 3. Piscataway: IEEE, 2003: 3473-3478. |
| [10] | LI Y, MO K, SHAO L, et al. Learning 3D part assembly from a single image[C]// Proceedings of the 2020 European Conference on Computer Vision, LNCS 12351. Cham: Springer, 2020: 664-682. |
| [11] | LI J, XU K, CHAUDHURI S, et al. GRASS: generative recursive autoencoders for shape structures[J]. ACM Transactions on Graphics, 2017, 36(4): No.52. |
| [12] | MO K, GUERRERO P, YI L, et al. StructureNet: hierarchical graph networks for 3D shape generation[J]. ACM Transactions on Graphics, 2019, 38(6): No.242. |
| [13] | HARIHARAN B, ARBELÁEZ P, GIRSHICK R, et al. Simultaneous detection and segmentation[C]// Proceedings of the 2014 European Conference on Computer Vision, LNCS 8695. Cham: Springer, 2014: 297-312. |
| [14] | BOLYA D, ZHOU C, XIAO F Y, et al. YOLACT: real-time instance segmentation[C]// Proceedings of the 17th IEEE International Conference on Computer Vision. Piscataway: IEEE, 2019: 9156-9165. |
| [15] | GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]// Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2014: 580-587. |
| [16] | HE K, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN[C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017: 2980-2988. |
| [17] | 郭琪周,袁春. 基于空间语义信息特征融合的目标检测与分割[J]. 软件学报, 2023, 34(6): 2776-2788. |
| GUO Q Z, YUAN C. Leveraging spatial-semantic information in object detection and segmentation[J]. Journal of Software, 2023, 34(6): 2776-2788. | |
| [18] | 毛琳,任凤至,杨大伟,等. 基于卷积神经网络的全景分割 Transformer 模型[J]. 软件学报, 2023, 34(7): 3408-3421. |
| MAO L, REN F Z, YANG D W, et al. CNN based Transformer for panoptic segmentation[J]. Journal of Software, 2023, 34(7): 3408-3421. | |
| [19] | KIRILLOV A, MINTUN E, RAVI N, et al. Segment anything[C]// Proceedings of the 2023 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2023: 3992-4003. |
| [20] | ZHANG C, HAN D, QIAO Y, et al. Faster segment anything: towards lightweight SAM for mobile applications[EB/OL]. [2025-07-31].. |
| [21] | ZHAO X, DING W, AN Y, et al. Fast segment anything[EB/OL]. [2025-07-31].. |
| [22] | LÜDDECKE T, ECKER A. Image segmentation using text and image prompts[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 7076-7086. |
| [23] | 陈浩楠,朱映映,赵骏骐,等. 基于多模态关系建模的三维形状识别方法[J]. 软件学报, 2024, 35(5): 2208-2219. |
| CHEN H N, ZHU Y Y, ZHAO J Q, et al. 3D shape recognition method based on multi-modal relationship modeling[J]. Journal of Software, 2024, 35(5): 2208-2219. | |
| [24] | WANG B, CHEN C, CUI Z, et al. P2-Net: joint description and detection of local features for pixel and point matching[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 15984-15993. |
| [25] | BARROSO-LAGUNA A, MUNUKUTLA S, PRISACARIU V A, et al. Matching 2D images in 3D: metric relative pose from metric correspondences[C]// Proceedings of the 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2024: 4852-4863. |
| [1] | Shiwei LI, Yufeng ZHOU, Pengfei SUN, Weisong LIU, Zhuxuan MENG, Haojie LIAN. Point cloud data augmentation method based on scattering and absorption effects of coal dust on LiDAR electromagnetic waves [J]. Journal of Computer Applications, 2026, 46(1): 331-340. |
| [2] | Yi XIONG, Caiqi WANG, Ling MEI, Shiqian WU. Global feature pose estimation method based on keypoint distance [J]. Journal of Computer Applications, 2026, 46(1): 260-269. |
| [3] | Zimo ZHANG, Xuezhuan ZHAO. Multi-scale sparse graph guided vision graph neural networks [J]. Journal of Computer Applications, 2025, 45(7): 2188-2194. |
| [4] | Shiyue GUO, Jianwu DANG, Yangping WANG, Jiu YONG. 3D hand pose estimation combining attention mechanism and multi-scale feature fusion [J]. Journal of Computer Applications, 2025, 45(4): 1293-1299. |
| [5] | Benjie SHE, Shuzhi SU, Yanmin ZHU, Jian HUA, Chao WANG. Lightweight pose estimation network based on non-globally dependent integral regression [J]. Journal of Computer Applications, 2025, 45(3): 972-977. |
| [6] | Jianhua REN, Jiahui CAO, Di JIA. Hand pose estimation based on mask prompts and attention [J]. Journal of Computer Applications, 2025, 45(12): 4012-4020. |
| [7] | Zhuoran LI, Hua LI, Tong WANG, Chaozhe JIANG. Lightweight human pose estimation based on merge state space model [J]. Journal of Computer Applications, 2025, 45(10): 3179-3186. |
| [8] | Shixiong KUANG, Junbo YAO, Jiawei LU, Qibing WANG, Gang XIAO. Data augmentation method for abnormal elevator passenger behaviors based on dynamic graph convolutional network [J]. Journal of Computer Applications, 2025, 45(10): 3187-3194. |
| [9] | Zhengdong ZENG, Ming ZHAO. Spatio-temporal context network for 3D human pose estimation based on graph attention [J]. Journal of Computer Applications, 2025, 45(10): 3161-3169. |
| [10] | Junying CHEN, Shijie GUO, Lingling CHEN. Lightweight human pose estimation based on decoupled attention and ghost convolution [J]. Journal of Computer Applications, 2025, 45(1): 223-233. |
| [11] | Xun SUN, Ruifeng FENG, Yanru CHEN. Monocular 3D object detection method integrating depth and instance segmentation [J]. Journal of Computer Applications, 2024, 44(7): 2208-2215. |
| [12] | Zheng WU, Zhiyou CHENG, Zhentian WANG, Chuanjian WANG, Sheng WANG, Hui XU. Deep learning-based classification of head movement amplitude during patient anaesthesia resuscitation [J]. Journal of Computer Applications, 2024, 44(7): 2258-2263. |
| [13] | Yaxing BING, Yangping WANG, Jiu YONG, Haomou BAI. Six degrees of freedom object pose estimation algorithm based on filter learning network [J]. Journal of Computer Applications, 2024, 44(6): 1920-1926. |
| [14] | Wenshuo GAO, Xiaoyun CHEN. Point cloud classification network based on node structure [J]. Journal of Computer Applications, 2024, 44(5): 1471-1478. |
| [15] | Pengfei ZHANG, Litao HAN, Hengjian FENG, Hongmei LI. Point cloud semantic segmentation based on attention mechanism and global feature optimization [J]. Journal of Computer Applications, 2024, 44(4): 1086-1092. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||