


Journal of Computer Applications ›› 2026, Vol. 46 ›› Issue (1): 331-340.DOI: 10.11772/j.issn.1001-9081.2025010085
• Frontier and comprehensive applications • Previous Articles
Shiwei LI1, Yufeng ZHOU1, Pengfei SUN1, Weisong LIU2, Zhuxuan MENG2, Haojie LIAN1( )
)
Received:2025-01-22
Revised:2025-03-21
Accepted:2025-03-27
Online:2026-01-10
Published:2026-01-10
Contact:
Haojie LIAN
About author:LI Shiwei, born in 1999, M. S. candidate. His research interests include deep learning.Supported by:
李世伟1, 周昱峰1, 孙鹏飞1, 刘伟松2, 孟竹喧2, 廉浩杰1()
通讯作者:
廉浩杰
作者简介:李世伟(1999—),男,山西晋城人,硕士研究生,主要研究方向:深度学习基金资助:CLC Number:
Shiwei LI, Yufeng ZHOU, Pengfei SUN, Weisong LIU, Zhuxuan MENG, Haojie LIAN. Point cloud data augmentation method based on scattering and absorption effects of coal dust on LiDAR electromagnetic waves[J]. Journal of Computer Applications, 2026, 46(1): 331-340.
李世伟, 周昱峰, 孙鹏飞, 刘伟松, 孟竹喧, 廉浩杰. 基于煤尘对激光雷达电磁波散射和吸收效应的点云数据增强方法[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 331-340.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2025010085
Fig. 1 Scattering effect of scattered particles on pulses
Fig. 2 Example of snow simulation algorithm[14]
Fig. 3 Basic environments of open-pit mines
Fig. 4 Schematic diagram of coal dust optical characteristics analysis experiment[21]
| 粒径大小/μm | 权重 | ||
|---|---|---|---|
| (0,20] | 0.006 1 | 9.5 | 0.689 |
| (20,45] | 0.044 5 | 10.7 | 0.279 |
| (45,60] | 0.000 0 | 19.2 | 0.022 |
| (60,90] | -0.008 8 | 25.2 | 0.009 |
| (90,125] | -0.000 2 | 34.3 | 0.001 |
| (125,150] | 0.024 6 | 36.8 | 0.000 |
| (150,180] | 0.030 3 | 44.4 | 0.000 |
| (212,250] | 0.023 7 | 216.6 | 0.000 |
Tab. 1 Calculation for extinction coefficients[21] and weights
| 粒径大小/μm | 权重 | ||
|---|---|---|---|
| (0,20] | 0.006 1 | 9.5 | 0.689 |
| (20,45] | 0.044 5 | 10.7 | 0.279 |
| (45,60] | 0.000 0 | 19.2 | 0.022 |
| (60,90] | -0.008 8 | 25.2 | 0.009 |
| (90,125] | -0.000 2 | 34.3 | 0.001 |
| (125,150] | 0.024 6 | 36.8 | 0.000 |
| (150,180] | 0.030 3 | 44.4 | 0.000 |
| (212,250] | 0.023 7 | 216.6 | 0.000 |
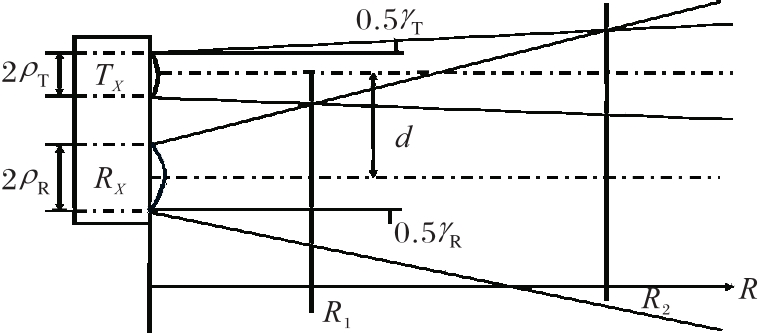
Fig. 5 Schematic diagram of LiDAR sensor with dual-beam configuration[23]

Fig. 6 Comparison of received signal power of single LiDAR pulse[13]
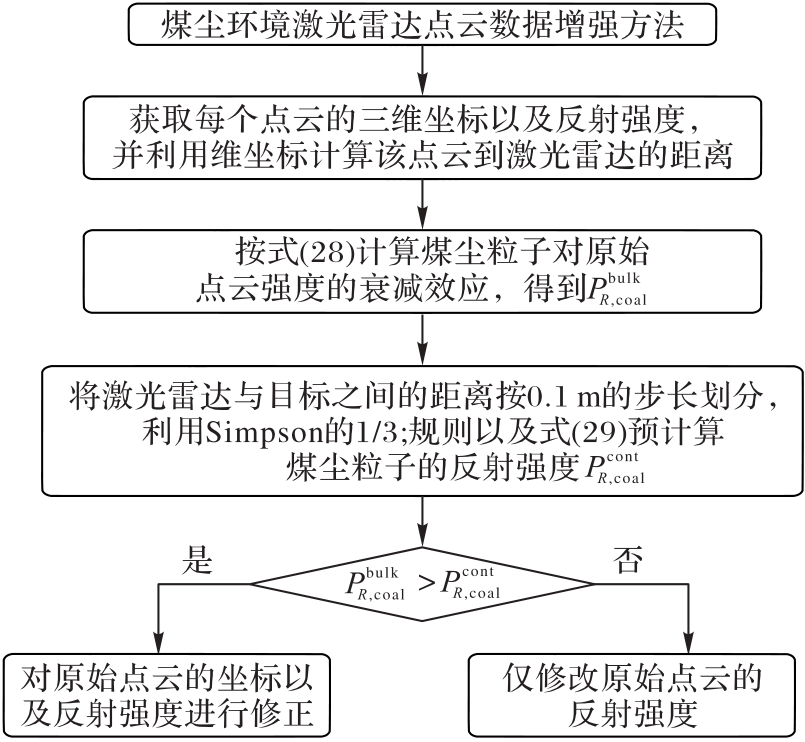
Fig. 7 Flow of point cloud simulation algorithm in coal dust environment

Fig. 8 Camera perspective

Fig. 9 Simulation results of AutoMine dataset (sample 1)
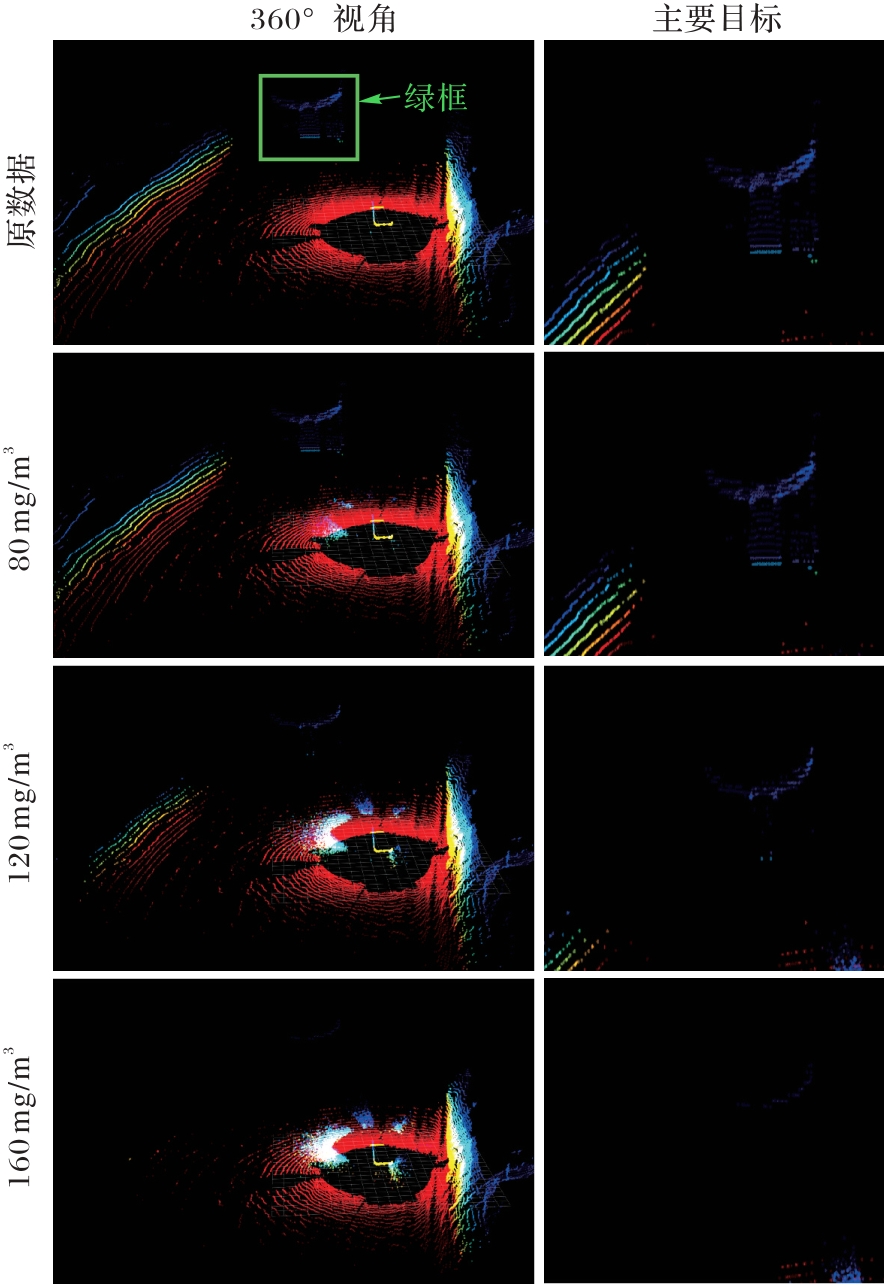
Fig. 10 Simulation results of AutoMine dataset (sample 2)

Fig. 11 Simulation results of KITTI dataset (sample 1)

Fig. 12 Simulation results of KITTI dataset (sample 2)

Fig. 13 Simulation results of KITTI dataset (sample 3)
| 模型 | 数据 | 汽车 AP@0.7IoU | 行人AP@0.25IoU | 骑行者AP@0.25IoU | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Easy | Moderate | Hard | Easy | Moderate | Hard | Easy | Moderate | Hard | ||
| PV-RCNN++ | 原始数据 | 95.89 | 85.88 | 86.23 | 63.04 | 45.90 | 42.60 | 72.51 | 48.16 | 45.02 |
| 仿真数据 | 96.01 | 86.35 | 86.41 | 64.31 | 51.42 | 47.56 | 74.96 | 49.68 | 46.54 | |
| PV-RCNN | 原始数据 | 91.88 | 80.10 | 77.41 | 50.57 | 43.89 | 39.97 | 70.35 | 51.67 | 48.22 |
| 仿真数据 | 92.90 | 81.98 | 78.26 | 54.06 | 45.63 | 40.88 | 70.95 | 52.51 | 49.97 | |
| PointRCNN | 原始数据 | 88.52 | 74.60 | 70.56 | 49.62 | 43.24 | 38.18 | 69.28 | 49.47 | 46.26 |
| 仿真数据 | 89.68 | 75.27 | 71.72 | 50.89 | 44.39 | 39.59 | 68.36 | 50.89 | 47.33 | |
| PointPillars | 原始数据 | 87.25 | 72.86 | 68.32 | 35.00 | 29.81 | 27.44 | 63.28 | 43.24 | 40.22 |
| 仿真数据 | 87.98 | 73.90 | 69.16 | 35.88 | 31.20 | 29.49 | 59.70 | 43.83 | 39.75 | |
| Voxel_RCNN_Car | 原始数据 | 98.56 | 92.85 | 91.12 | ||||||
| 仿真数据 | 98.38 | 93.57 | 91.68 | |||||||
Tab. 2 Detection precisions of 3D object detection models in coal dust environment
| 模型 | 数据 | 汽车 AP@0.7IoU | 行人AP@0.25IoU | 骑行者AP@0.25IoU | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Easy | Moderate | Hard | Easy | Moderate | Hard | Easy | Moderate | Hard | ||
| PV-RCNN++ | 原始数据 | 95.89 | 85.88 | 86.23 | 63.04 | 45.90 | 42.60 | 72.51 | 48.16 | 45.02 |
| 仿真数据 | 96.01 | 86.35 | 86.41 | 64.31 | 51.42 | 47.56 | 74.96 | 49.68 | 46.54 | |
| PV-RCNN | 原始数据 | 91.88 | 80.10 | 77.41 | 50.57 | 43.89 | 39.97 | 70.35 | 51.67 | 48.22 |
| 仿真数据 | 92.90 | 81.98 | 78.26 | 54.06 | 45.63 | 40.88 | 70.95 | 52.51 | 49.97 | |
| PointRCNN | 原始数据 | 88.52 | 74.60 | 70.56 | 49.62 | 43.24 | 38.18 | 69.28 | 49.47 | 46.26 |
| 仿真数据 | 89.68 | 75.27 | 71.72 | 50.89 | 44.39 | 39.59 | 68.36 | 50.89 | 47.33 | |
| PointPillars | 原始数据 | 87.25 | 72.86 | 68.32 | 35.00 | 29.81 | 27.44 | 63.28 | 43.24 | 40.22 |
| 仿真数据 | 87.98 | 73.90 | 69.16 | 35.88 | 31.20 | 29.49 | 59.70 | 43.83 | 39.75 | |
| Voxel_RCNN_Car | 原始数据 | 98.56 | 92.85 | 91.12 | ||||||
| 仿真数据 | 98.38 | 93.57 | 91.68 | |||||||
| 模型 | 数据 | 汽车AP@0.7IoU | 行人AP@0.25IoU | 骑行者AP@0.25IoU | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Easy | Moderate | Hard | Easy | Moderate | Hard | Easy | Moderate | Hard | ||
| PV-RCNN++ | 原始数据 | 96.03 | 86.29 | 86.80 | 63.06 | 45.95 | 42.66 | 72.51 | 48.16 | 45.02 |
| 仿真数据 | 96.04 | 86.99 | 86.97 | 64.31 | 51.60 | 47.67 | 74.96 | 49.68 | 46.54 | |
| PV-RCNN | 原始数据 | 95.12 | 87.24 | 84.93 | 58.04 | 51.14 | 47.22 | 70.56 | 52.89 | 50.10 |
| 仿真数据 | 96.41 | 88.38 | 86.14 | 58.60 | 51.71 | 46.04 | 71.50 | 53.97 | 51.77 | |
| PointRCNN | 原始数据 | 92.48 | 83.19 | 79.23 | 52.66 | 47.52 | 41.27 | 71.38 | 52.09 | 48.67 |
| 仿真数据 | 93.58 | 84.21 | 79.88 | 54.50 | 48.63 | 42.63 | 74.00 | 55.90 | 52.89 | |
| PointPillars | 原始数据 | 92.09 | 85.05 | 82.00 | 44.63 | 38.75 | 35.73 | 66.85 | 48.11 | 44.94 |
| 仿真数据 | 93.55 | 85.94 | 83.16 | 45.77 | 39.76 | 36.13 | 61.28 | 48.90 | 44.23 | |
| Voxel_RCNN_Car | 原始数据 | 98.60 | 93.09 | 91.28 | ||||||
| 仿真数据 | 98.41 | 93.76 | 91.81 | |||||||
Tab. 3 Detection precisions from bird's-eye view in coal dust environment
| 模型 | 数据 | 汽车AP@0.7IoU | 行人AP@0.25IoU | 骑行者AP@0.25IoU | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Easy | Moderate | Hard | Easy | Moderate | Hard | Easy | Moderate | Hard | ||
| PV-RCNN++ | 原始数据 | 96.03 | 86.29 | 86.80 | 63.06 | 45.95 | 42.66 | 72.51 | 48.16 | 45.02 |
| 仿真数据 | 96.04 | 86.99 | 86.97 | 64.31 | 51.60 | 47.67 | 74.96 | 49.68 | 46.54 | |
| PV-RCNN | 原始数据 | 95.12 | 87.24 | 84.93 | 58.04 | 51.14 | 47.22 | 70.56 | 52.89 | 50.10 |
| 仿真数据 | 96.41 | 88.38 | 86.14 | 58.60 | 51.71 | 46.04 | 71.50 | 53.97 | 51.77 | |
| PointRCNN | 原始数据 | 92.48 | 83.19 | 79.23 | 52.66 | 47.52 | 41.27 | 71.38 | 52.09 | 48.67 |
| 仿真数据 | 93.58 | 84.21 | 79.88 | 54.50 | 48.63 | 42.63 | 74.00 | 55.90 | 52.89 | |
| PointPillars | 原始数据 | 92.09 | 85.05 | 82.00 | 44.63 | 38.75 | 35.73 | 66.85 | 48.11 | 44.94 |
| 仿真数据 | 93.55 | 85.94 | 83.16 | 45.77 | 39.76 | 36.13 | 61.28 | 48.90 | 44.23 | |
| Voxel_RCNN_Car | 原始数据 | 98.60 | 93.09 | 91.28 | ||||||
| 仿真数据 | 98.41 | 93.76 | 91.81 | |||||||
| [1] | 孙继平,程继杰.煤矿冲击地压和煤与瓦斯突出事故自动发现与报警方法研究[J].工矿自动化, 2024, 50(5): 1-5. |
| SUN J P, CHENG J J. Research on automatic detection and alarm methods for coal mine rock burst and coal and gas outburst accidents [J]. Journal of Mine Automation, 2024, 50(5): 1-5. | |
| [2] | BAO H, ZHANG R. Study on optimization of coal truck flow in open-pit mine [J]. Advances in Civil Engineering, 2020, 2020: 1-13. |
| [3] | ZHANG Z, CHEN X, HUANG J. Research on innovation posture of automated driving technology based on patentometrics [J]. Technology and Investment, 2018, 9(3): No.137. |
| [4] | 于明凯,陈留金,林泽阳,等.基于城市轨道交通无人驾驶技术的矿车无人驾驶系统[J].科技创新与应用, 2022, 12(1): 132-134. |
| YU M K, CHEN L J, LIN Z Y, et al. Autonomous mine car system based on urban rail transit unmanned technology [J]. Technology Innovation and Application, 2022, 12(1): 132-134. | |
| [5] | GAO Y, AI Y, TIAN B, et al. Parallel end-to-end autonomous mining: an IoT-oriented approach [J]. IEEE Internet of Things Journal, 2019, 7(2): 1011-1023. |
| [6] | ZHANG Y, CARBALLO A, YANG H, et al. Perception and sensing for autonomous vehicles under adverse weather conditions: a survey [J]. ISPRS Journal of Photogrammetry Remote Sensing, 2023, 196: 146-177. |
| [7] | URMSON C, ANHALT J, BAGNELL D, et al. Autonomous driving in urban environments: boss and the urban challenge [J]. Journal of Field Robotics, 2008, 25(8): 425-466. |
| [8] | ZAMANAKOS G, TSOCHATZIDIS L, AMANATIADIS A, et al. A comprehensive survey of LIDAR-based 3D object detection methods with deep learning for autonomous driving [J]. Computers Graphics, 2021, 99: 153-181. |
| [9] | DO A T, YOO M. LossDistillNet: 3D object detection in point cloud under harsh weather conditions [J]. IEEE Access, 2022, 10: 84882-84893. |
| [10] | HU X, DUAN Z, HUANG X, et al. Context-aware data augmentation for lidar 3D object detection [C]// Proceedings of the 2023 IEEE International Conference on Image Processing. Piscataway: IEEE, 2023: 11-15. |
| [11] | AN P, LIANG J, MA J, et al. RS-Aug: improve 3D object detection on LiDAR with realistic simulator based data augmentation [J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(9): 10165-10176. |
| [12] | ZHANG Y, DING M, YANG H, et al. LiDAR point cloud augmentation for adverse conditions using conditional generative model [J]. Remote Sensing, 2024, 16(12): No.2247. |
| [13] | HAHNER M, SAKARIDIS C, DAI D, et al. Fog simulation on real LiDAR point clouds for 3D object detection in adverse weather [C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 15283-15292. |
| [14] | HAHNER M, SAKARIDIS C, BIJELIC M, et al. Lidar snowfall simulation for robust 3D object detection [C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 16364-16374. |
| [15] | VARGAS RIVERO J R, GERBICH T, BUSCHARDT B, et al. Data augmentation of automotive lidar point clouds under adverse weather situations [J]. Sensors, 2021, 21(13): No.4503. |
| [16] | 张康,刘澈,王帅钦.激光雷达点云数据增强方法、装置、设备、介质及产品: CN202411081199.5 [P]. 2024-12-24. |
| ZHANG K, LIU C, WANG S Q. LiDAR point cloud data augmentation method, device, equipment, medium, and product: CN202411081199.5 [P]. 2024-12-24. | |
| [17] | 刘磊,郭二民,李忠华,等.加强“十四五”露天煤矿开采环境管理的建议[J].中国煤炭, 2021, 47(10): 61-66. |
| LIU L, GUO E M, LI Z H, et al. Suggestions on strengthening environmental management of open-pit coal mining during the 14th Five-Year Plan [J]. China Coal, 2021, 47(10): 61-66. | |
| [18] | 唐珏,王俊. “双碳”目标下煤炭发展及对策建议[J].中国矿业, 2023, 32(9): 22-31. |
| TANG Y, WANG J. Coal development and countermeasures under the goal of "double carbon" [J]. China Mining Magazine, 2023, 32(9): 22-31. | |
| [19] | WANG Z, ZHOU W, JISKANI I M, et al. Dust pollution in cold region Surface Mines and its prevention and control [J]. Environmental Pollution, 2022, 292(Part A): No.118293. |
| [20] | SWINEHART D F. The Beer-Lambert Law [J]. Journal of Chemical Education, 1962, 39(7): No.333. |
| [21] | LI B, MAO S, ZHANG H. Laser attenuation and ranging correction in the coal dust environment based on MIE theory and phase ranging principle [J]. Atmosphere, 2023, 14(5): No.845. |
| [22] | AZAM S, MISHRA D P. Effects of particle size, dust concentration and dust-dispersion-air pressure on rock dust inertant requirement for coal dust explosion suppression in underground coal mines [J]. Process Safety Environmental Protection, 2019, 126: 35-43. |
| [23] | RASSHOFER R H, SPIES M, SPIES H. Influences of weather phenomena on automotive laser radar systems [J]. Advances in Radio Science, 2011, 9: 49-60. |
| [24] | SASSEN K, DODD G C. Lidar crossover function and misalignment effects [J]. Applied Optics, 1982, 21(17): 3162-3165. |
| [25] | LI Y, LI Z, TENG S, et al. AutoMine: an unmanned mine dataset [C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 21308-21317. |
| [26] | GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving? the KITTI vision benchmark suite [C]// Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2012: 3354-3361. |
| [27] | CHEN X, KUNDU K, ZHANG Z, et al. Monocular 3D object detection for autonomous driving [C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 2147-2156. |
| [28] | SIMONELLI A, BULO S R, PORZI L, et al. Disentangling monocular 3d object detection [C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 1991-1999. |
| [29] | TEAM O. OpenPCDet: an open-source toolbox for 3D object detection from point clouds [EB/OL]. [2024-12-14]. . |
| [30] | SHI S, JIANG L, DENG J, et al. PV-RCNN++: point-voxel feature set abstraction with local vector representation for 3D object detection [J]. International Journal of Computer Vision, 2023, 131(2): 531-551. |
| [31] | SHI S, GUO C, JIANG L, et al. Pv-RCNN: point-voxel feature set abstraction for 3D object detection [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 10529-10538. |
| [32] | SHI S, WANG X, LI H. PointRCNN: 3D object proposal generation and detection from point cloud [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 770-779. |
| [33] | LANG A H, VORA S, CAESAR H, et al. PointPillars: fast encoders for object detection from point clouds [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 12697-12705. |
| [34] | DENG J, SHI S, LI P, et al. Voxel R-CNN: towards high performance voxel-based 3D object detection [J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2021,32(2): 1201-1209. |
| [1] | Yinlong JIAN, Xuebin CHEN, Zhongrui JING, Qi ZHONG, Zhenbo ZHANG. Data augmentation scheme based on conditional generative adversarial network in federated learning [J]. Journal of Computer Applications, 2026, 46(1): 21-32. |
| [2] | Binhong XIE, Rui WANG, Rui ZHANG, Yingjun ZHANG. Agent prototype distillation algorithm for few-shot object detection [J]. Journal of Computer Applications, 2026, 46(1): 233-241. |
| [3] | Wen LI, Kairong LI, Kai YANG. Subgraph-aware contrastive learning with data augmentation [J]. Journal of Computer Applications, 2026, 46(1): 1-9. |
| [4] | Shuwen HUANG, Keyu GUO, Xiangyu SONG, Feng HAN, Shijie SUN, Huansheng SONG. Multi-target 3D visual grounding method based on monocular images [J]. Journal of Computer Applications, 2026, 46(1): 207-215. |
| [5] | Yu SANG, Tong GONG, Chen ZHAO, Bowen YU, Siman LI. Domain-adaptive nighttime object detection method with photometric alignment [J]. Journal of Computer Applications, 2026, 46(1): 242-251. |
| [6] | Zhihui ZAN, Yajing WANG, Ke LI, Zhixiang YANG, Guangyu YANG. Multi-feature fusion speech emotion recognition method based on SAA-CNN-BiLSTM network [J]. Journal of Computer Applications, 2026, 46(1): 69-76. |
| [7] | Yiming LIANG, Jing FAN, Wenze CHAI. Multi-scale feature fusion sentiment classification based on bidirectional cross attention [J]. Journal of Computer Applications, 2025, 45(9): 2773-2782. |
| [8] | Chuang WANG, Lu YU, Jianwei CHEN, Cheng PAN, Wenbo DU. Review of open set domain adaptation [J]. Journal of Computer Applications, 2025, 45(9): 2727-2736. |
| [9] | Jiaxiang ZHANG, Xiaoming LI, Jiahui ZHANG. Few-shot object detection algorithm based on new category feature enhancement and metric mechanism [J]. Journal of Computer Applications, 2025, 45(9): 2984-2992. |
| [10] | Lili WEI, Lirong YAN, Xiaofen TANG. Contextual semantic representation and pixel relationship correction for few-shot object detection [J]. Journal of Computer Applications, 2025, 45(9): 2993-3002. |
| [11] | Binhong XIE, Yingkun LA, Yingjun ZHANG, Rui ZHANG. Semi-supervised object detection framework guided by self-paced learning [J]. Journal of Computer Applications, 2025, 45(8): 2546-2554. |
| [12] | Chengzhi YAN, Ying CHEN, Kai ZHONG, Han GAO. 3D object detection algorithm based on multi-scale network and axial attention [J]. Journal of Computer Applications, 2025, 45(8): 2537-2545. |
| [13] | Liang CHEN, Xuan WANG, Kun LEI. Helmet wearing detection algorithm for complex scenarios based on cross-layer multi-scale feature fusion [J]. Journal of Computer Applications, 2025, 45(7): 2333-2341. |
| [14] | Zimo ZHANG, Xuezhuan ZHAO. Multi-scale sparse graph guided vision graph neural networks [J]. Journal of Computer Applications, 2025, 45(7): 2188-2194. |
| [15] | Pingping YU, Yuting YAN, Xinliang TANG, He SU, Jianchao WANG. Multi-object tracking algorithm for construction machinery in transmission line scenarios [J]. Journal of Computer Applications, 2025, 45(7): 2351-2360. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||