


《计算机应用》唯一官方网站 ›› 2023, Vol. 43 ›› Issue (8): 2546-2555.DOI: 10.11772/j.issn.1001-9081.2022071022
收稿日期:2022-07-13
修回日期:2022-11-04
接受日期:2022-11-07
发布日期:2023-01-15
出版日期:2023-08-10
通讯作者:
谢杰
作者简介:王一(1981—),男,河北唐山人,副教授,博士,主要研究方向:机器视觉感知、图像处理、精密测量基金资助:
Yi WANG1,2, Jie XIE1( ), Jia CHENG1, Liwei DOU2,3
), Jia CHENG1, Liwei DOU2,3
Received:2022-07-13
Revised:2022-11-04
Accepted:2022-11-07
Online:2023-01-15
Published:2023-08-10
Contact:
Jie XIE
About author:WANG Yi, born in 1981, Ph. D., associate professor. His research interests include machine vision perception, image processing, precision measurement.Supported by:摘要:
6自由度(DoF)位姿估计是计算机视觉与机器人技术中的一项关键技术,它能从给定的输入图像中估计物体的6DoF位姿,即3DoF平移和3DoF旋转,已经成为机器人操作、自动驾驶、增强现实等领域中的一项至关重要的任务。首先,介绍了6DoF位姿的概念以及基于特征点对应、基于模板匹配、基于三维特征描述符等传统方法存在的问题;然后,以基于特征对应、基于像素投票、基于回归和面向多物体实例、面向合成数据、面向类别级的不同角度详细介绍了当前主流的基于深度学习的6DoF位姿估计算法,归纳整理了在位姿估计方面常用的数据集以及评价指标,并对部分算法进行了实验性能评价;最后,给出了当前位姿估计面临的挑战和未来的重点研究方向。
中图分类号:
王一, 谢杰, 程佳, 豆立伟. 基于深度学习的RGB图像目标位姿估计综述[J]. 计算机应用, 2023, 43(8): 2546-2555.
Yi WANG, Jie XIE, Jia CHENG, Liwei DOU. Review of object pose estimation in RGB images based on deep learning[J]. Journal of Computer Applications, 2023, 43(8): 2546-2555.
| 数据集 | 年份 | 类数 | 训练集图像 | 测试集 | 适用场景 | |
|---|---|---|---|---|---|---|
| 真实 | 合成 | 真实 | ||||
| LM | 2012 | 15 | — | 50 000 | 18 273 | 杂乱 |
| LM-O | 2014 | 8 | — | 50 000 | 1 214 | 杂乱遮挡 |
| T-LESS | 2017 | 30 | 37 584 | 50 000 | 10 080 | 无纹理对称 |
| YCB-V | 2018 | 21 | 113 198 | 50 000 | 20 738 | 对称 |
| TUD-L | 2018 | 3 | 38 288 | 50 000 | 23 914 | 光照变化 |
表1 5种位姿估计数据集
Tab. 1 Five pose estimation datasets
| 数据集 | 年份 | 类数 | 训练集图像 | 测试集 | 适用场景 | |
|---|---|---|---|---|---|---|
| 真实 | 合成 | 真实 | ||||
| LM | 2012 | 15 | — | 50 000 | 18 273 | 杂乱 |
| LM-O | 2014 | 8 | — | 50 000 | 1 214 | 杂乱遮挡 |
| T-LESS | 2017 | 30 | 37 584 | 50 000 | 10 080 | 无纹理对称 |
| YCB-V | 2018 | 21 | 113 198 | 50 000 | 20 738 | 对称 |
| TUD-L | 2018 | 3 | 38 288 | 50 000 | 23 914 | 光照变化 |
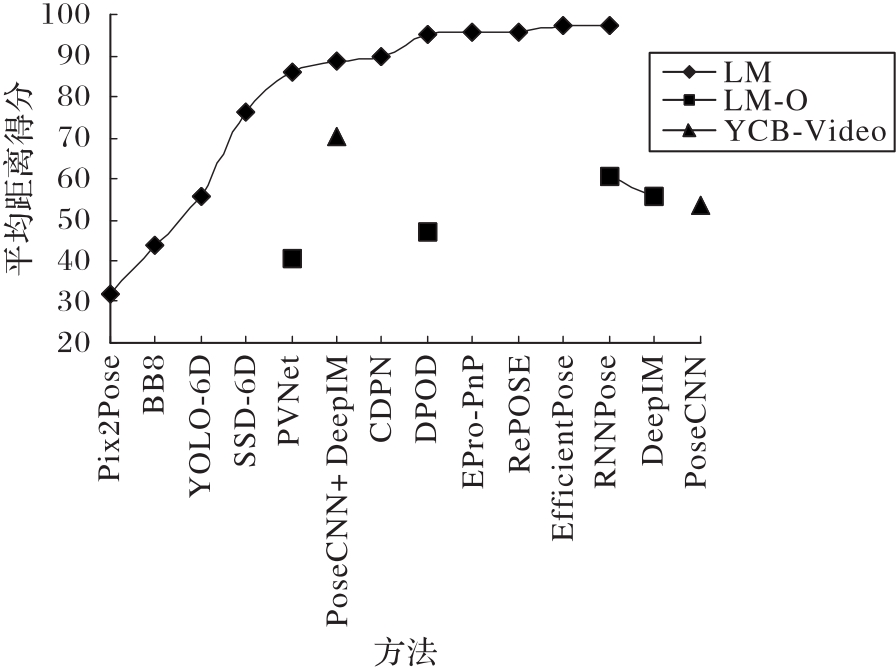
图1 各方法在LM、LM-O、YCB-Video数据集上的ADD得分
Fig. 1 ADD scores of each method on LM,LM-O,YCB-Video datasets
| 数据集 | 方法 估计 | 细化方式 | 范围 | 时间/s | 测试图像 | |||
|---|---|---|---|---|---|---|---|---|
| LM | DPOD | 41.15 | 37.3 | 45.0 | — | 局部 | 0.024 | RGB |
| LM-O | DPOD | 11.35 | 10.1 | 12.6 | — | 局部 | 0.172 | RGB |
| PVNet | 59.25 | 50.2 | 68.3 | ICP | 局部 | — | RGB-D | |
| PVNet | 48.55 | 42.8 | 54.3 | — | 局部 | — | RGB | |
| SSD-6D | 6.50 | 4.7 | 8.3 | — | 全局 | — | RGB | |
| CDPN | 46.50 | 39.3 | 53.7 | — | 局部 | 0.279 | RGB | |
| CDPNv2 | 57.90 | 46.9 | 68.9 | ICP | 局部 | 0.506 | RGB-D | |
| Pix2Pose | 55.20 | 47.3 | 63.1 | — | 局部 | 5.195 | RGB-D | |
| Pix2Pose | 27.00 | 23.3 | 30.7 | — | 局部 | 1.310 | RGB | |
| Pix2Pose-PBR | 18.30 | 15.6 | 21.0 | — | 局部 | 1.157 | RGB | |
| CosyPose-PBR | 65.75 | 56.7 | 74.8 | ICP | 全局 | 8.289 | RGB-D | |
| CosyPose-PBR | 54.30 | 48.0 | 60.6 | — | 全局 | 0.550 | RGB | |
| T-LESS | DPOD | 5.15 | 4.8 | 5.5 | — | 局部 | 0.206 | RGB |
| CDPN | 39.75 | 37.7 | 41.8 | — | 局部 | 0.708 | RGB | |
| CDPNv2 | 40.85 | 36.8 | 44.9 | ICP | 局部 | 2.486 | RGB-D | |
| Pix2Pose | 27.85 | 26.1 | 29.6 | — | 局部 | 1.084 | RGB | |
| Pix2Pose | 49.30 | 43.8 | 54.8 | ICP | 局部 | 4.180 | RGB-D | |
| YCB-V | DPOD | 20.60 | 19.6 | 21.6 | — | 局部 | 0.341 | RGB |
| CDPN | 40.35 | 32.9 | 47.8 | — | 局部 | 0.208 | RGB | |
| CDPNv2-PBR | 55.70 | 51.1 | 60.3 | ICP | 局部 | 1.034 | RGB-D | |
| CDPNv2 | 64.55 | 59.0 | 70.1 | ICP | 局部 | 0.637 | RGB-D | |
| Pix2Pose | 40.05 | 37.2 | 42.9 | — | 局部 | 1.025 | RGB | |
| Pix2Pose | 79.15 | 76.6 | 81.7 | ICP | 局部 | 2.590 | RGB-D | |
| CosyPose | 80.70 | 77.2 | 84.2 | — | 全局 | 0.241 | RGB | |
| CosyPose-PBR | 53.50 | 51.6 | 55.4 | — | 全局 | 0.342 | RGB | |
| TUD-L | DPOD | 19.25 | 16.2 | 22.3 | — | 局部 | 0.046 | RGB |
| CDPN | 69.95 | 60.5 | 79.4 | — | 局部 | 0.089 | RGB | |
| CDPNv2 | 89.70 | 83.2 | 96.2 | ICP | 局部 | 0.313 | RGB-D | |
| CDPNv2-PBR | 77.25 | 69.8 | 84.7 | ICP | 局部 | 0.280 | RGB-D | |
| Pix2Pose | 30.95 | 25.5 | 36.4 | — | 局部 | 0.419 | RGB | |
| Pix2Pose | 79.90 | 73.7 | 86.1 | ICP | 局部 | 1.336 | RGB-D | |
| CosyPose | 74.80 | 68.9 | 80.7 | — | 全局 | 0.238 | RGB | |
| CosyPose | 92.05 | 86.9 | 97.2 | ICP | 全局 | 0.812 | RGB-D |
表2 BOP中基于RGB图像的训练方法对比
Tab. 2 Comparison of training methods based RGB images in BOP
| 数据集 | 方法 估计 | 细化方式 | 范围 | 时间/s | 测试图像 | |||
|---|---|---|---|---|---|---|---|---|
| LM | DPOD | 41.15 | 37.3 | 45.0 | — | 局部 | 0.024 | RGB |
| LM-O | DPOD | 11.35 | 10.1 | 12.6 | — | 局部 | 0.172 | RGB |
| PVNet | 59.25 | 50.2 | 68.3 | ICP | 局部 | — | RGB-D | |
| PVNet | 48.55 | 42.8 | 54.3 | — | 局部 | — | RGB | |
| SSD-6D | 6.50 | 4.7 | 8.3 | — | 全局 | — | RGB | |
| CDPN | 46.50 | 39.3 | 53.7 | — | 局部 | 0.279 | RGB | |
| CDPNv2 | 57.90 | 46.9 | 68.9 | ICP | 局部 | 0.506 | RGB-D | |
| Pix2Pose | 55.20 | 47.3 | 63.1 | — | 局部 | 5.195 | RGB-D | |
| Pix2Pose | 27.00 | 23.3 | 30.7 | — | 局部 | 1.310 | RGB | |
| Pix2Pose-PBR | 18.30 | 15.6 | 21.0 | — | 局部 | 1.157 | RGB | |
| CosyPose-PBR | 65.75 | 56.7 | 74.8 | ICP | 全局 | 8.289 | RGB-D | |
| CosyPose-PBR | 54.30 | 48.0 | 60.6 | — | 全局 | 0.550 | RGB | |
| T-LESS | DPOD | 5.15 | 4.8 | 5.5 | — | 局部 | 0.206 | RGB |
| CDPN | 39.75 | 37.7 | 41.8 | — | 局部 | 0.708 | RGB | |
| CDPNv2 | 40.85 | 36.8 | 44.9 | ICP | 局部 | 2.486 | RGB-D | |
| Pix2Pose | 27.85 | 26.1 | 29.6 | — | 局部 | 1.084 | RGB | |
| Pix2Pose | 49.30 | 43.8 | 54.8 | ICP | 局部 | 4.180 | RGB-D | |
| YCB-V | DPOD | 20.60 | 19.6 | 21.6 | — | 局部 | 0.341 | RGB |
| CDPN | 40.35 | 32.9 | 47.8 | — | 局部 | 0.208 | RGB | |
| CDPNv2-PBR | 55.70 | 51.1 | 60.3 | ICP | 局部 | 1.034 | RGB-D | |
| CDPNv2 | 64.55 | 59.0 | 70.1 | ICP | 局部 | 0.637 | RGB-D | |
| Pix2Pose | 40.05 | 37.2 | 42.9 | — | 局部 | 1.025 | RGB | |
| Pix2Pose | 79.15 | 76.6 | 81.7 | ICP | 局部 | 2.590 | RGB-D | |
| CosyPose | 80.70 | 77.2 | 84.2 | — | 全局 | 0.241 | RGB | |
| CosyPose-PBR | 53.50 | 51.6 | 55.4 | — | 全局 | 0.342 | RGB | |
| TUD-L | DPOD | 19.25 | 16.2 | 22.3 | — | 局部 | 0.046 | RGB |
| CDPN | 69.95 | 60.5 | 79.4 | — | 局部 | 0.089 | RGB | |
| CDPNv2 | 89.70 | 83.2 | 96.2 | ICP | 局部 | 0.313 | RGB-D | |
| CDPNv2-PBR | 77.25 | 69.8 | 84.7 | ICP | 局部 | 0.280 | RGB-D | |
| Pix2Pose | 30.95 | 25.5 | 36.4 | — | 局部 | 0.419 | RGB | |
| Pix2Pose | 79.90 | 73.7 | 86.1 | ICP | 局部 | 1.336 | RGB-D | |
| CosyPose | 74.80 | 68.9 | 80.7 | — | 全局 | 0.238 | RGB | |
| CosyPose | 92.05 | 86.9 | 97.2 | ICP | 全局 | 0.812 | RGB-D |
| 1 | 张跃强. 基于直线特征的空间非合作目标位姿视觉测量方法研究[D].长沙:国防科学技术大学, 2016:1-5. |
| ZHANG Y Q. Research on vision based pose measurement methods for space uncooperative objects using line features[D]. Changsha: National University of Defense Technology, 2016: 1-5. | |
| 2 | 王朱君,王石,李雪晴,等. 基于深度学习的事件因果关系抽取综述[J]. 计算机应用, 2021, 41(5):1247-1255. 10.11772/j.issn.1001-9081.2020071080 |
| WANG Z J, WANG S, LI X Q, et al. Review of event causality extraction based on deep learning[J]. Journal of Computer Applications, 2021, 41(5): 1247-1255. 10.11772/j.issn.1001-9081.2020071080 | |
| 3 | 郝颖明,朱枫,欧锦军. 目标位姿测量中的三维视觉方法[J]. 中国图象图形学报, 2002, 7(12):26-30. 10.3969/j.issn.1006-8961.2002.12.003 |
| HAO Y M, ZHU F, OU J J. 3D visual methods for object pose measurement[J]. Journal of Image and Graphics, 2002, 7(12): 26-30. 10.3969/j.issn.1006-8961.2002.12.003 | |
| 4 | LOWE D G. Object recognition from local scale-invariant features[C]// Proceedings of the 7th IEEE International Conference on Computer Vision. Piscataway: IEEE, 1999,2:1150-1157. 10.1109/iccv.1999.790410 |
| 5 | BAY H, ESS A, TUYTELAARS T, et al. Speeded-Up Robust Features (SURF)[J]. Computer Vision and Image Understanding, 2008, 110(3): 346-59. 10.1016/j.cviu.2007.09.014 |
| 6 | RUBLEE E, RABAUD V, KONOLIGE K, et al. ORB: an efficient alternative to SIFT or SURF[C]// Proceedings of the 2011 International Conference on Computer Vision. Piscataway: IEEE, 2011:2564-2571. 10.1109/iccv.2011.6126544 |
| 7 | FIORE P D. Efficient linear solution of exterior orientation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2001, 23(2): 140-148. 10.1109/34.908965 |
| 8 | LU C P, HAGER G D, MJOLSNESS E. Fast and globally convergent pose estimation from video images[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(6): 610-622. 10.1109/34.862199 |
| 9 | LEPETIT V, MORENO-NOGUER F, FUA P. EPnP: an accurate O(n) solution to the PnP problem[J]. International Journal of Computer Vision, 2009, 81(2): 155-166. 10.1007/s11263-008-0152-6 |
| 10 | ABDEL-AZIZ Y I, KARARA H M, HAUCK M. Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry[J]. Photogrammetric Engineering and Remote Sensing, 2015, 81(2): 103-107. 10.14358/pers.81.2.103 |
| 11 | HINTERSTOISSER S, HOLZER S, CAGNIART C, et al. Multimodal templates for real-time detection of texture-less objects in heavily cluttered scenes[C]// Proceedings of the 2011 International Conference on Computer Vision. Piscataway: IEEE, 2011:858-865. 10.1109/iccv.2011.6126326 |
| 12 | RUSU R B, BLODOW N, BEETZ M. Fast Point Feature Histograms (FPFH) for 3D registration[C]// Proceedings of the 2009 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2009: 3212-3217. 10.1109/robot.2009.5152473 |
| 13 | DROST B, ULRICH M, NAVAB N, et al. Model globally, match locally: efficient and robust 3D object recognition[C]// Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2010:998-1005. 10.1109/cvpr.2010.5540108 |
| 14 | SAHIN C, KOUSKOURIDAS R, KIM T K. Iterative Hough forest with histogram of control points for 6 DoF object registration from depth images[C]// Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2016:4113-4118. 10.1109/iros.2016.7759605 |
| 15 | BRACHMANN E, KRULL A, MICHEL F, et al. Learning 6D object pose estimation using 3D object coordinates[C]// Proceedings of the 2014 European Conference on Computer Vision, LNCS 8690. Cham: Springer, 2014:536-551. |
| 16 | RAD M, LEPETIT V. BB8: a scalable, accurate, robust to partial occlusion method for predicting the 3D poses of challenging objects without using depth[C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017:3848-3856. 10.1109/iccv.2017.413 |
| 17 | TEKIN B, SINHA S N, FUA P. Real-time seamless single shot 6D object pose prediction[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018:292-301. 10.1109/cvpr.2018.00038 |
| 18 | SIMONYAN K, ZISSERMAN A. Very deep convolutional networks for large-scale image recognition[EB/OL]. (2015-04-10) [2022-06-22].. |
| 19 | 吴继春,方海国,阳广兴,等. 基于最小尺寸点模型的6D位姿估计与机械臂抓取[J]. 计算机集成制造系统, 2022, 28(8):2472-2480. 10.13196/j.cims.2022.08.018 |
| WU J C, FANG H G, YANG G X, et al. 6D Pose estimation and robotic arm grabbing based on minimum size points model[J]. Computer Integrated Manufacturing Systems, 2022, 28(8): 2472-2480. 10.13196/j.cims.2022.08.018 | |
| 20 | ZAKHAROV S, SHUGUROV I, ILIC S. DPOD: 6D pose object detector and refiner[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019:1941-1950. 10.1109/iccv.2019.00203 |
| 21 | HOSSEINI J O, MUSTIKOVELA S K, PERTSCH K, et al. iPose: instance-aware 6D pose estimation of partly occluded objects[C]// Proceedings of the 2018 Asian Conference on Computer Vision. Cham: Springer, 2019:477-492. 10.1007/978-3-030-20893-6_30 |
| 22 | CHEN B, PARRA Á, CAO J W, et al. End-to-end learnable geometric vision by backpropagating PnP optimization[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020:8097-8106. 10.1109/cvpr42600.2020.00812 |
| 23 | CHEN H S, WANG P C, WANG F, et al. EPro-PnP: generalized end-to-end probabilistic perspective-n-points for monocular object pose estimation[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022:2771-2780. 10.1109/cvpr52688.2022.00280 |
| 24 | PENG S D, ZHOU X W, LIU Y, et al. PVNet: pixel-wise voting network for 6DoF object pose estimation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(6): 3212-3223. 10.1109/tpami.2020.3047388 |
| 25 | YU X, ZHUANG Z Y, KONIUSZ P, et al. 6DoF object pose estimation via differentiable proxy voting loss[EB/OL]. (2020-05-04) [2022-06-25].. |
| 26 | PARK K, PATTEN T, VINCZE M. Pix2Pose: pixel-wise coordinate regression of objects for 6D pose estimation[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019:7667-7676. 10.1109/iccv.2019.00776 |
| 27 | 倪涛,张泮虹,李文航,等. 基于关键点预测的装配机器人工件视觉定位技术[J]. 农业机械学报, 2022, 53(6):443-450. 10.6041/j.issn.1000-1298.2022.06.047 |
| NI T, ZHANG P H, LI W H, et al. Visual positioning technology of assembly robot workpiece based on prediction of key points[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(6): 443-450. 10.6041/j.issn.1000-1298.2022.06.047 | |
| 28 | KEHL W, MANHARDT F, TOMBARI F, et al. SSD-6D: making RGB-based 3D detection and 6D pose estimation great again[C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017:1530-1538. 10.1109/iccv.2017.169 |
| 29 | LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot multiBox detector[C]// Proceedings of the 2016 European Conference on Computer Vision, LNCS 9905. Cham: Springer, 2016:21-37. |
| 30 | SZEGEDY C, IOFFE S, VANHOUCKE V, et al. Inception-v4, Inception-ResNet and the impact of residual connections on learning[C]// Proceedings of the 31st AAAI Conference on Artificial Intelligence. Palo Alto, CA: AAAI Press, 2017: 4278-4284. 10.1609/aaai.v31i1.11231 |
| 31 | XIANG Y, SCHMIDT T, NARAYANAN V, et al. PoseCNN: a convolutional neural network for 6D object pose estimation in cluttered scenes[C/OL]// Proceedings of the 2018 Robotics Science and Systems Conference. [2022-06-03].. 10.15607/rss.2018.xiv.019 |
| 32 | LONG J, SHELHAMER E, DARRELL T. Fully convolutional networks for semantic segmentation[C]// Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2015:3431-3440. 10.1109/cvpr.2015.7298965 |
| 33 | DO T T, CAI M, PHAM T, et al. Deep-6DPose: recovering 6D object pose from a single RGB image[EB/OL]. (2018-02-28) [2022-06-02].. |
| 34 | HE K M, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN[C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017:2980-2988. 10.1109/iccv.2017.322 |
| 35 | LI Z G, WANG G, JI X Y. CDPN: coordinates-based disentangled pose network for real-time RGB-based 6-DoF object pose estimation[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019:7677-7686. 10.1109/iccv.2019.00777 |
| 36 | SUNDERMEYER M, DURNER M, PUANG E Y, et al. Multi-path learning for object pose estimation across domains[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020:13913-13922. 10.1109/cvpr42600.2020.01393 |
| 37 | GROOS D, RAMAMPIARO H, IHLEN E A F. EfficientPose: scalable single-person pose estimation[J]. Applied Intelligence, 2021, 51(4): 2518-2533. 10.1007/s10489-020-01918-7 |
| 38 | 李耀. 面向机器人拣选的弱纹理物体位姿估计方法研究[D]. 广州:广东工业大学, 2022:1-97. |
| LI Y. Research on pose estimation method for robot picking of weakly textured objects[D]. Guangzhou: Guangdong University of Technology, 2022: 1-97. | |
| 39 | LABBÉ Y, CARPENTIER J, AUBRY M, et al. CosyPose: consistent multi-view multi-object 6D pose estimation[C]// Proceedings of the 2020 European Conference on Computer Vision, LNCS 12362. Cham: Springer, 2020:574-591. |
| 40 | LI Y, WANG G, JI X Y, et al. DeepIM: deep iterative matching for 6D pose estimation[J]. International Journal of Computer Vision, 2020, 128(3): 657-678. 10.1007/s11263-019-01250-9 |
| 41 | REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. 10.1109/tpami.2016.2577031 |
| 42 | LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection[C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017:2999-3007. 10.1109/iccv.2017.324 |
| 43 | MARION P, FLORENCE P R, MANUELLI L, et al. Label fusion: a pipeline for generating ground truth labels for real RGBD data of cluttered scenes[C]// Proceedings of the 2018 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2018:3235-3242. 10.1109/icra.2018.8460950 |
| 44 | DENNINGER M, SUNDERMEYER M, WINKELBAUER D, et al. BlenderProc[EB/OL]. (2019-10-25) [2022-06-02].. |
| 45 | RAMBACH J, DENG C B, PAGANI A, et al. Learning 6DoF object poses from synthetic single channel images[C]// Proceedings of the 2018 IEEE International Symposium on Mixed and Augmented Reality Adjunct. Piscataway: IEEE, 2018:164-169. 10.1109/ismar-adjunct.2018.00058 |
| 46 | SU Y Z, RAMBACH J, PAGANI A, et al. SynPo-Net: accurate and Fast CNN-based 6DoF object pose estimation using synthetic training[J]. Sensors, 2021, 21(1): No.300. 10.3390/s21010300 |
| 47 | KENDALL A, GRIMES M, CIPOLLA R. PoseNet: a convolutional network for real-time 6-DOF camera relocalization[C]// Proceedings of the 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2015:2938-2946. 10.1109/iccv.2015.336 |
| 48 | IWASE S, LIU X Y, KHIRODKAR R, et al. RePOSE: fast 6D object pose refinement via deep texture rendering[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021:3283-3292. 10.1109/iccv48922.2021.00329 |
| 49 | 左国玉,张成威,刘洪星,等. 低质量渲染图像的目标物体6D姿态估计[J]. 控制与决策, 2022, 37(1):135-141. |
| ZUO G Y, ZHANG C W, LIU H X, et al. 6D object pose estimation for low-quality rendering images[J]. Control and Decision, 2022, 37(1): 135-141. | |
| 50 | LIU F C, FANG P F, YAO Z W, et al. Recovering 6D object pose from RGB indoor image based on two-stage detection network with multi-task loss[J]. Neurocomputing, 2019, 337: 15-23. 10.1016/j.neucom.2018.12.061 |
| 51 | WU S T, ZHONG S H, LIU Y. Deep residual learning for image steganalysis[J]. Multimedia Tools and Applications, 2018, 77(9):10437-10453. 10.1007/s11042-017-4440-4 |
| 52 | CHEANG C, LIN H T, FU Y W, et al. Learning 6-DoF object poses to grasp category-level objects by language instructions[C]// Proceedings of the 2022 International Conference on Robotics and Automation. Piscataway: IEEE, 2022:8476-8482. 10.48550/arXiv.2205.04028 |
| 53 | XU Y, LIN K Y, ZHANG G F, et al. RNNPose: recurrent 6-DoF object pose refinement with robust correspondence field estimation and pose optimization[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022:14860-14870. 10.1109/cvpr52688.2022.01446 |
| 54 | HODAŇ T, SUNDERMEYER M, DROST B, et al. BOP Challenge 2020 on 6D object localization[C]// Proceedings of the 2020 European Conference on Computer Vision, LNCS 12536. Cham: Springer, 2020:577-594. |
| 55 | HODAŇ T, HALUZA P, OBDRŽÁLEK Š, et al. T-LESS: an RGB-D dataset for 6D pose estimation of texture-less objects[C]// Proceedings of the 2017 IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE, 2017:880-888. 10.1109/wacv.2017.103 |
| 56 | HODAŇ T, MICHEL F, BRACHMANN E, et al. BOP: benchmark for 6D object pose estimation[C]// Proceedings of the 2018 European Conference on Computer Vision, LNCS 11214. Cham: Springer, 2018:19-35. |
| 57 | BRACHMANN E, MICHEL F, KRULL A, et al. Uncertainty-driven 6D pose estimation of objects and scenes from a single RGB image[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016:3364-3372. 10.1109/cvpr.2016.366 |
| 58 | SHOTTON J, GLOCKER B, ZACH C, et al. Scene coordinate regression forests for camera relocalization in RGB-D images[C]// Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2013:2930-2937. 10.1109/cvpr.2013.377 |
| 59 | ZOU D W, CAO Q, ZHUANG Z L, et al. An improved method for model-based training, detection and pose estimation of texture-less 3D objects in occlusion scenes[J]. Procedia CIRP, 2019, 83: 541-546. 10.1016/j.procir.2019.04.115 |
| 60 | 徐宁. 单目摄像头实时视觉定位[D]. 上海:上海交通大学, 2008:1-97. |
| XU N. Real-time visual localization with a single camera[D]. Shanghai: Shanghai Jiao Tong University, 2008: 1-97. | |
| 61 | 张浩. 基于单目视觉的增强现实技术研究[D]. 武汉:华中科技大学, 2005:1-61. |
| ZHANG H. Research on the technology of augmented reality based on monocular vision[D]. Wuhan: Huazhong University of Science and Technology, 2005: 1-61. | |
| 62 | 战茜,屠大维. 移动机器人自主抓取作业[J]. 计算机应用, 2016, 36(S1):95-98, 102. |
| ZHAN Q, TU D W. Research on autonomous grasping of mobile robot[J]. Journal of Computer Applications, 2016, 36(S1): 95-98, 102. | |
| 63 | 雷志明. 基于RGB图像机械臂抓取的位姿估计研究[D]. 南宁:广西大学, 2021:1-107. 10.1109/iccar52225.2021.9463454 |
| LEI Z M. Research on pose estimation based on RGB image manipulator grasping[D]. Nanning: Guangxi University, 2021: 1-107. 10.1109/iccar52225.2021.9463454 | |
| 64 | 黄心汉,苏豪,彭刚,等. 基于卷积神经网络的目标识别及姿态检测[J]. 华中科技大学学报(自然科学版), 2017, 45(10):7-11. 10.13245/j.hust.171002 |
| HUANG X H, SU H, PENG G, et al. Object identification and pose detection based on convolutional neural network[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2017, 45(10): 7-11. 10.13245/j.hust.171002 | |
| 65 | 蒋明,陈雨,周青华,等. 适用于非合作目标捕获的轻量级位姿估计网络[J]. 计算机工程, 2022, 48(6):235-242. |
| JIANG M, CHEN Y, ZHOU Q H, et al. Lightweight pose estimation network for non-cooperative target acquisition[J]. Computer Engineering, 2022, 48(6): 235-242. | |
| 66 | GORSCHLÜTER F, ROJTBERG P, PÖLLABAUER T. A survey of 6D object detection based on 3D models for industrial applications[J]. Journal of Imaging, 2022, 8(3): No.53. 10.3390/jimaging8030053 |
| 67 | SAHIN C, KIM T K. Category-level 6D object pose recovery in depth images[C]// Proceedings of the 2018 European Conference on Computer Vision, LNCS 11129. Cham: Springer, 2019:665-681. |
| 68 | SUWAJANAKORN S, SNAVELY N, TOMPSON J, et al. Discovery of latent 3D keypoints via end-to-end geometric reasoning[C]// Proceedings of the 32nd International Conference on Neural Information Processing Systems. Red Hook, NY: Curran Associates Inc., 2018:2067-2074. |
| 69 | ESTEVES C, SUD A, LUO Z Y, et al. Cross-domain 3D equivariant image embeddings[C]// Proceedings of the 36th International Conference on Machine Learning. New York: JMLR.org, 2019:1812-1822. |
| [1] | 李校林, 杨松佳. 基于深度学习的多用户毫米波中继网络混合波束赋形[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2511-2516. |
| [2] | 郭祥, 姜文刚, 王宇航. 基于改进Inception-ResNet的加密流量分类方法[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2471-2476. |
| [3] | 崔雨萌, 王靖亚, 刘晓文, 闫尚义, 陶知众. 融合注意力和裁剪机制的通用文本分类模型[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2396-2405. |
| [4] | 张琨, 杨丰玉, 钟发, 曾广东, 周世健. 基于混合代码表示的源代码脆弱性检测[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2517-2526. |
| [5] | 拓雨欣, 薛涛. 融合指针网络与关系嵌入的三元组联合抽取模型[J]. 《计算机应用》唯一官方网站, 2023, 43(7): 2116-2124. |
| [6] | 郑帅, 张晓龙, 邓鹤, 任宏伟. 基于多尺度特征融合和网格注意力机制的三维肝脏影像分割方法[J]. 《计算机应用》唯一官方网站, 2023, 43(7): 2303-2310. |
| [7] | 岑黎彬, 李靖东, 林淳波, 王晓玲. 基于深度自回归模型的近似查询处理方法[J]. 《计算机应用》唯一官方网站, 2023, 43(7): 2034-2039. |
| [8] | 梁敏, 刘佳艺, 李杰. 融合迭代反馈与注意力机制的图像超分辨重建方法[J]. 《计算机应用》唯一官方网站, 2023, 43(7): 2280-2287. |
| [9] | 叶坤佩, 熊熙, 丁哲. 基于领域融合和时间权重的招工推荐模型[J]. 《计算机应用》唯一官方网站, 2023, 43(7): 2133-2139. |
| [10] | 陈一驰, 陈斌. 计算机视觉中的终身学习综述[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1785-1795. |
| [11] | 靳鑫, 刘仰川, 朱叶晨, 张子健, 高欣. 基于残差编解码-生成对抗网络的正弦图修复的稀疏角度锥束CT图像重建[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1950-1957. |
| [12] | 董润婷, 吴利, 王晓英, 曹腾飞, 黄建强, 管琴, 吴洁瑕. 深度学习在天气预报领域的应用分析及研究进展综述[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1958-1968. |
| [13] | 秦静, 马雪倩, 高福杰, 季长清, 汪祖民. 基于步态分析的帕金森病辅助诊断方法综述[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1687-1695. |
| [14] | 徐清海, 丁世飞, 孙统风, 张健, 郭丽丽. 改进的基于多路径特征的胶囊网络[J]. 《计算机应用》唯一官方网站, 2023, 43(5): 1330-1335. |
| [15] | 王先兰, 周金坤, 穆楠, 王晨. 基于多任务联合学习的跨视角地理定位方法[J]. 《计算机应用》唯一官方网站, 2023, 43(5): 1625-1635. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||