


《计算机应用》唯一官方网站 ›› 2024, Vol. 44 ›› Issue (8): 2558-2570.DOI: 10.11772/j.issn.1001-9081.2023081121
姜文涛1, 李宛宣1( ), 张晟翀2
), 张晟翀2
收稿日期:2023-08-21
修回日期:2023-11-07
接受日期:2023-11-15
发布日期:2023-12-18
出版日期:2024-08-10
通讯作者:
李宛宣
作者简介:姜文涛(1986—),男,辽宁大连人,副教授,博士,主要研究方向:图像处理、模式识别、深度学习基金资助:
Wentao JIANG1, Wanxuan LI1(), Shengchong ZHANG2
Received:2023-08-21
Revised:2023-11-07
Accepted:2023-11-15
Online:2023-12-18
Published:2024-08-10
Contact:
Wanxuan LI
About author:JIANG Wentao, born in 1986, Ph. D., associate professor. His research interests include image processing, pattern recognition, deep learning.Supported by:摘要:
针对现有目标跟踪算法主要采用线性约束机制LADCF(Learning Adaptive Discriminative Correlation Filters)跟踪模型容易漂移的问题,提出非线性时间一致性的相关滤波目标跟踪算法。首先,结合史蒂文斯定律,提出贴近人类视觉感知特性的非线性时间一致项,使模型相对平滑地跟踪目标,从而保证跟踪连续性,避免跟踪模型漂移;其次,采用交替方向乘子法(ADMM)求解最优函数值,保证算法的跟踪实时性;最后,利用史蒂文斯定律非线性更新滤波器,使滤波器更新因子可以根据目标的变化增强和抑制滤波器,以适应目标变化,防止滤波器退化。在4个标准数据集上与主流相关滤波和深度学习算法对比实验,相较于基线算法LADCF,所提算法的跟踪精确度和成功率在OTB100数据集上分别提升了2.4和3.8个百分点;在UAV123上分别提升了1.5和2.5个百分点。实验结果表明,所提算法能有效避免跟踪模型漂移,降低滤波器退化概率,跟踪精确度和成功率较高,面对遮挡、光照变化等复杂场景时具有较强的鲁棒性。
中图分类号:
姜文涛, 李宛宣, 张晟翀. 非线性时间一致性的相关滤波目标跟踪[J]. 计算机应用, 2024, 44(8): 2558-2570.
Wentao JIANG, Wanxuan LI, Shengchong ZHANG. Correlation filtering based target tracking with nonlinear temporal consistency[J]. Journal of Computer Applications, 2024, 44(8): 2558-2570.

图1 LADCF算法与人眼视觉跟踪的效果对比
Fig. 1 Tracking effect comparison between LADCF algorithm and human vision
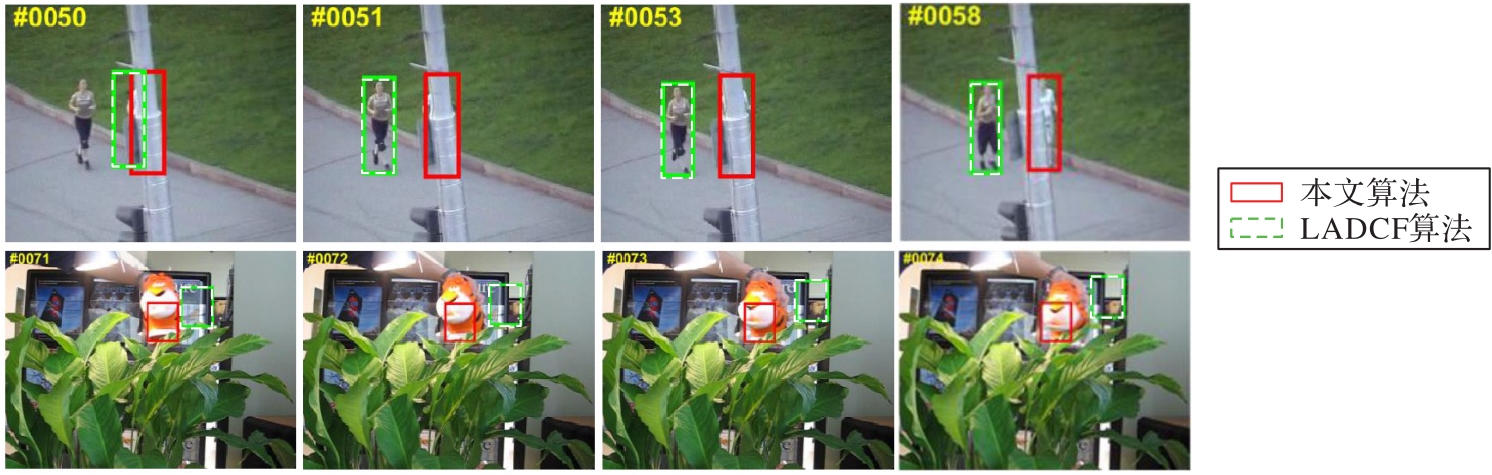
图2 本文算法与LADCF算法的跟踪效果对比
Fig. 2 Comparison of tracking effects between proposed algorithm and LADCF algorithm
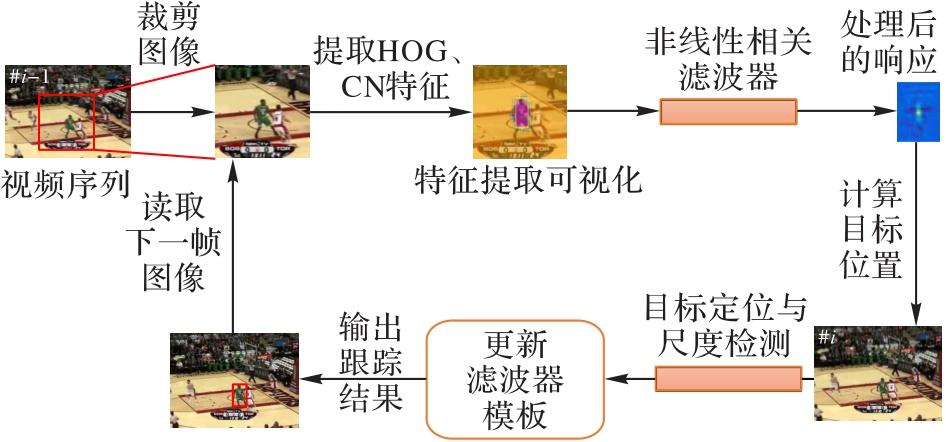
图3 本文算法框架
Fig. 3 Framework of proposed algorithm
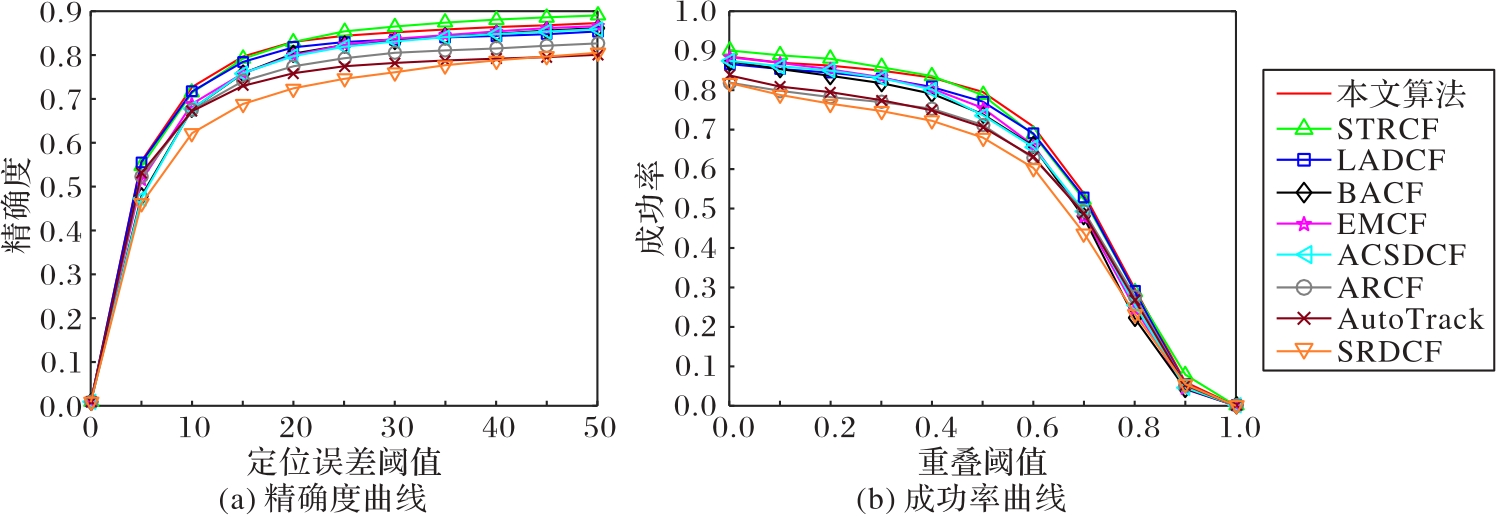
图4 各算法在OTB50上的定量比较结果
Fig. 4 Quantitative comparison results of various algorithms on OTB50
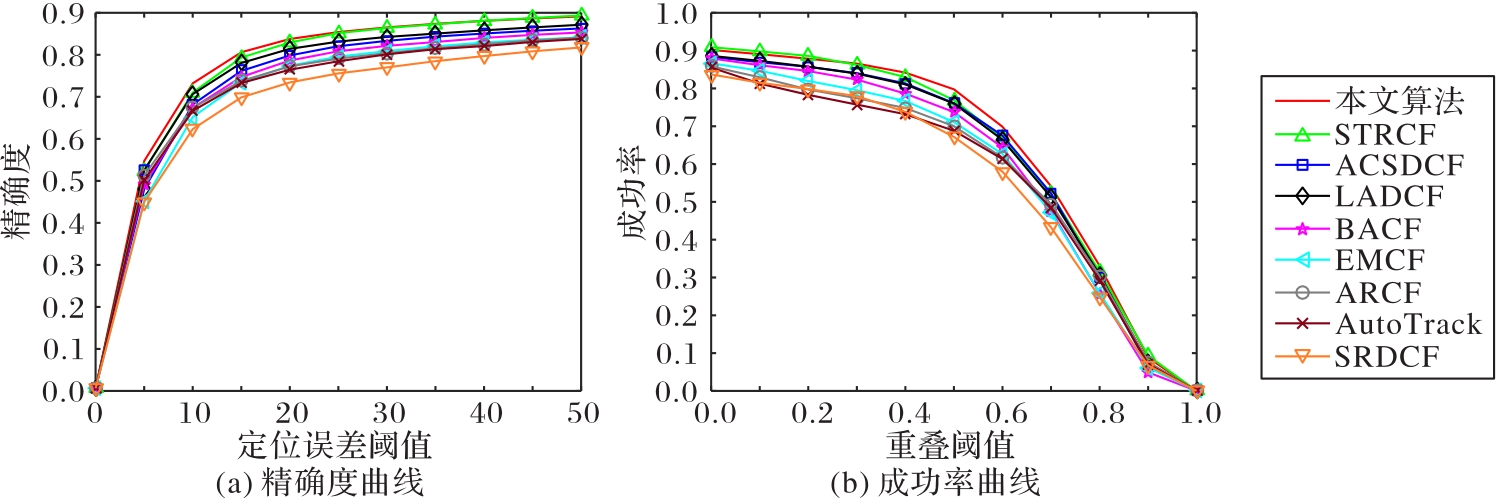
图5 各算法在OTB100上的定量比较结果
Fig. 5 Quantitative comparison results of various algorithms on OTB100
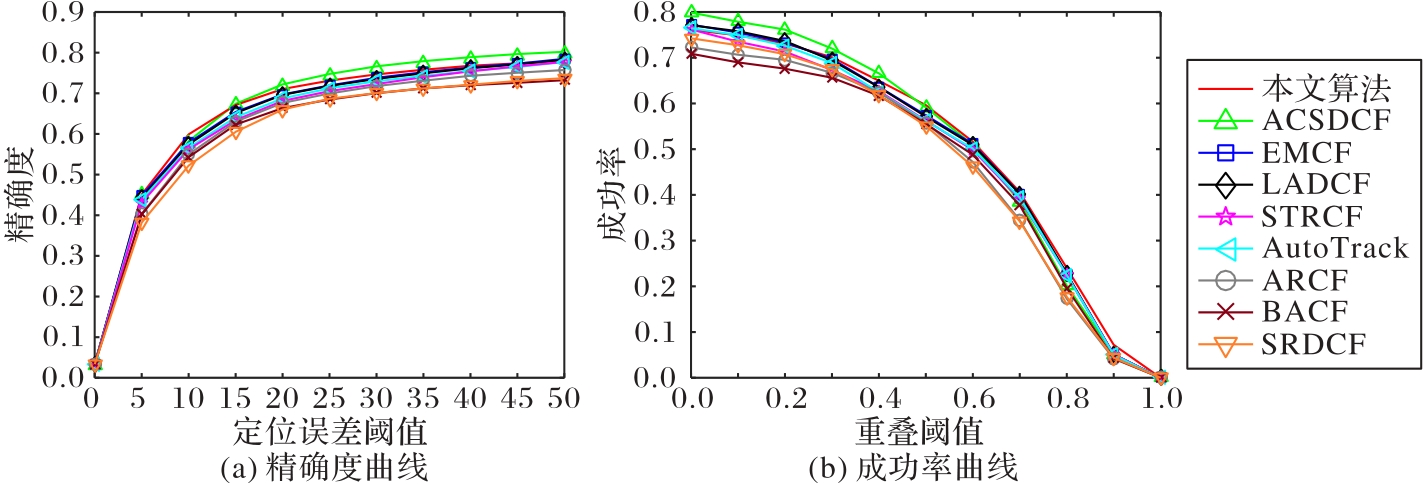
图6 各跟踪算法在UAV123上的定量比较结果
Fig. 6 Quantitative comparison resutls of various algorithms on UAV123

图7 各算法在DTB70上的定量比较结果
Fig. 7 Quantitative comparison results of various algorithms on DTB70
| 算法 | OTB50数据集 | OTB100数据集 | UAV123数据集 | DTB70数据集 | ||||
|---|---|---|---|---|---|---|---|---|
| DP | AUC | DP | AUC | DP | AUC | DP | AUC | |
| 本文算法 | 0.830 | 0.796 | 0.838 | 0.798 | 0.711 | 0.596 | 0.689 | 0.482 |
| STRCF算法 | 0.830 | 0.788 | 0.829 | 0.769 | 0.681 | 0.563 | 0.670 | 0.472 |
| LADCF算法 | 0.818 | 0.771 | 0.814 | 0.760 | 0.696 | 0.571 | 0.660 | 0.454 |
| EMCF算法 | 0.803 | 0.739 | 0.774 | 0.711 | 0.697 | 0.574 | 0.719 | 0.496 |
| BACF算法 | 0.800 | 0.755 | 0.786 | 0.738 | 0.664 | 0.555 | 0.582 | 0.398 |
| ACSDCF算法 | 0.798 | 0.737 | 0.799 | 0.761 | 0.719 | 0.591 | 0.649 | 0.437 |
| AutoTrack算法 | 0.744 | 0.707 | 0.765 | 0.688 | 0.688 | 0.562 | 0.717 | 0.479 |
| ARCF算法 | 0.759 | 0.712 | 0.773 | 0.700 | 0.660 | 0.557 | 0.629 | 0.428 |
| SRDCF算法 | 0.724 | 0.680 | 0.734 | 0.672 | 0.676 | 0.551 | 0.512 | 0.363 |
表1 各算法在4个标准数据集上的定量比较结果
Tab. 1 Quantitative comparison results of various algorithms on 4 standard datasets
| 算法 | OTB50数据集 | OTB100数据集 | UAV123数据集 | DTB70数据集 | ||||
|---|---|---|---|---|---|---|---|---|
| DP | AUC | DP | AUC | DP | AUC | DP | AUC | |
| 本文算法 | 0.830 | 0.796 | 0.838 | 0.798 | 0.711 | 0.596 | 0.689 | 0.482 |
| STRCF算法 | 0.830 | 0.788 | 0.829 | 0.769 | 0.681 | 0.563 | 0.670 | 0.472 |
| LADCF算法 | 0.818 | 0.771 | 0.814 | 0.760 | 0.696 | 0.571 | 0.660 | 0.454 |
| EMCF算法 | 0.803 | 0.739 | 0.774 | 0.711 | 0.697 | 0.574 | 0.719 | 0.496 |
| BACF算法 | 0.800 | 0.755 | 0.786 | 0.738 | 0.664 | 0.555 | 0.582 | 0.398 |
| ACSDCF算法 | 0.798 | 0.737 | 0.799 | 0.761 | 0.719 | 0.591 | 0.649 | 0.437 |
| AutoTrack算法 | 0.744 | 0.707 | 0.765 | 0.688 | 0.688 | 0.562 | 0.717 | 0.479 |
| ARCF算法 | 0.759 | 0.712 | 0.773 | 0.700 | 0.660 | 0.557 | 0.629 | 0.428 |
| SRDCF算法 | 0.724 | 0.680 | 0.734 | 0.672 | 0.676 | 0.551 | 0.512 | 0.363 |
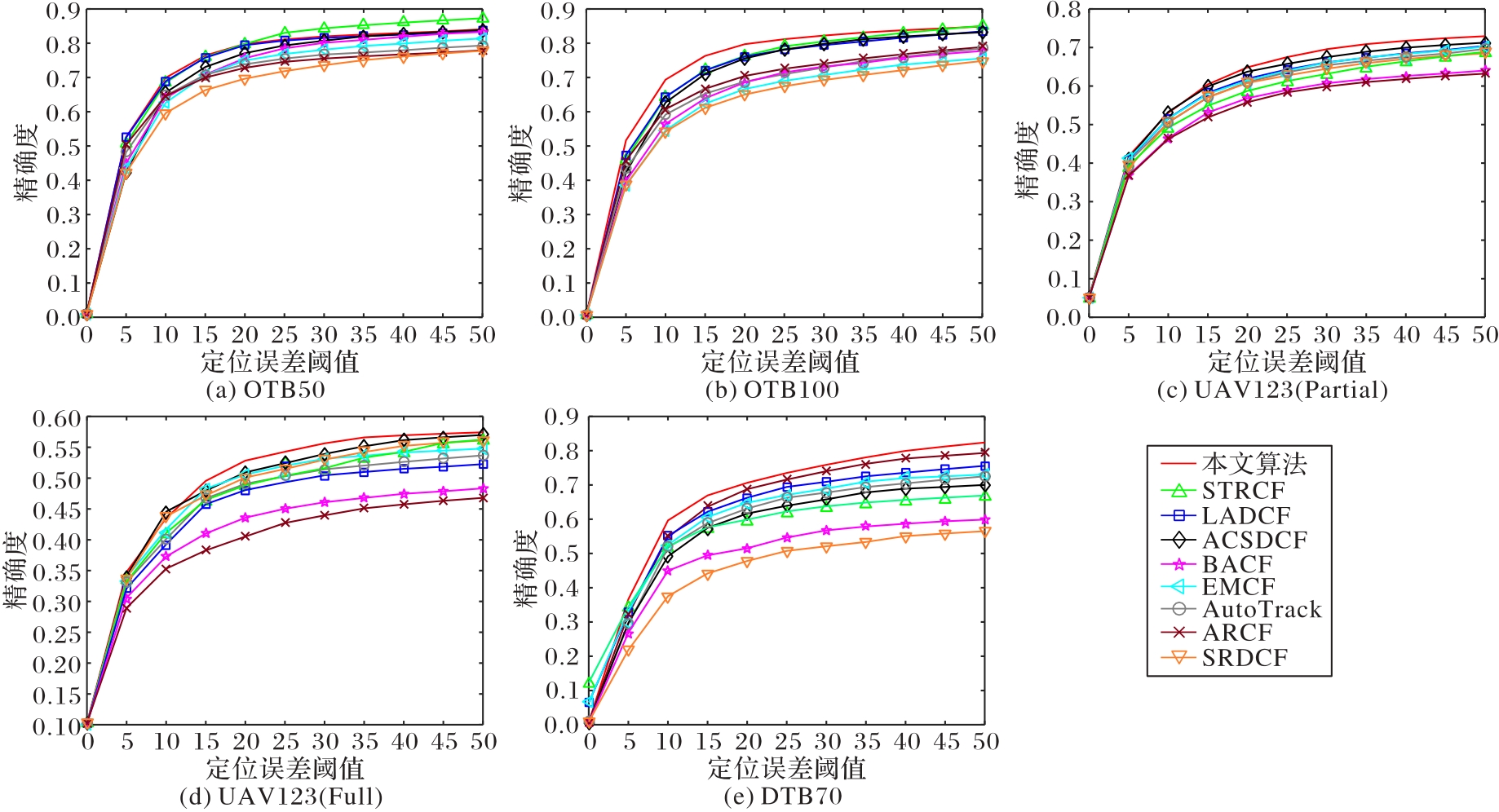
图8 各跟踪算法在遮挡属性下的精确度曲线
Fig. 8 Precision curves of various tracking algorithms for occlusion sequence
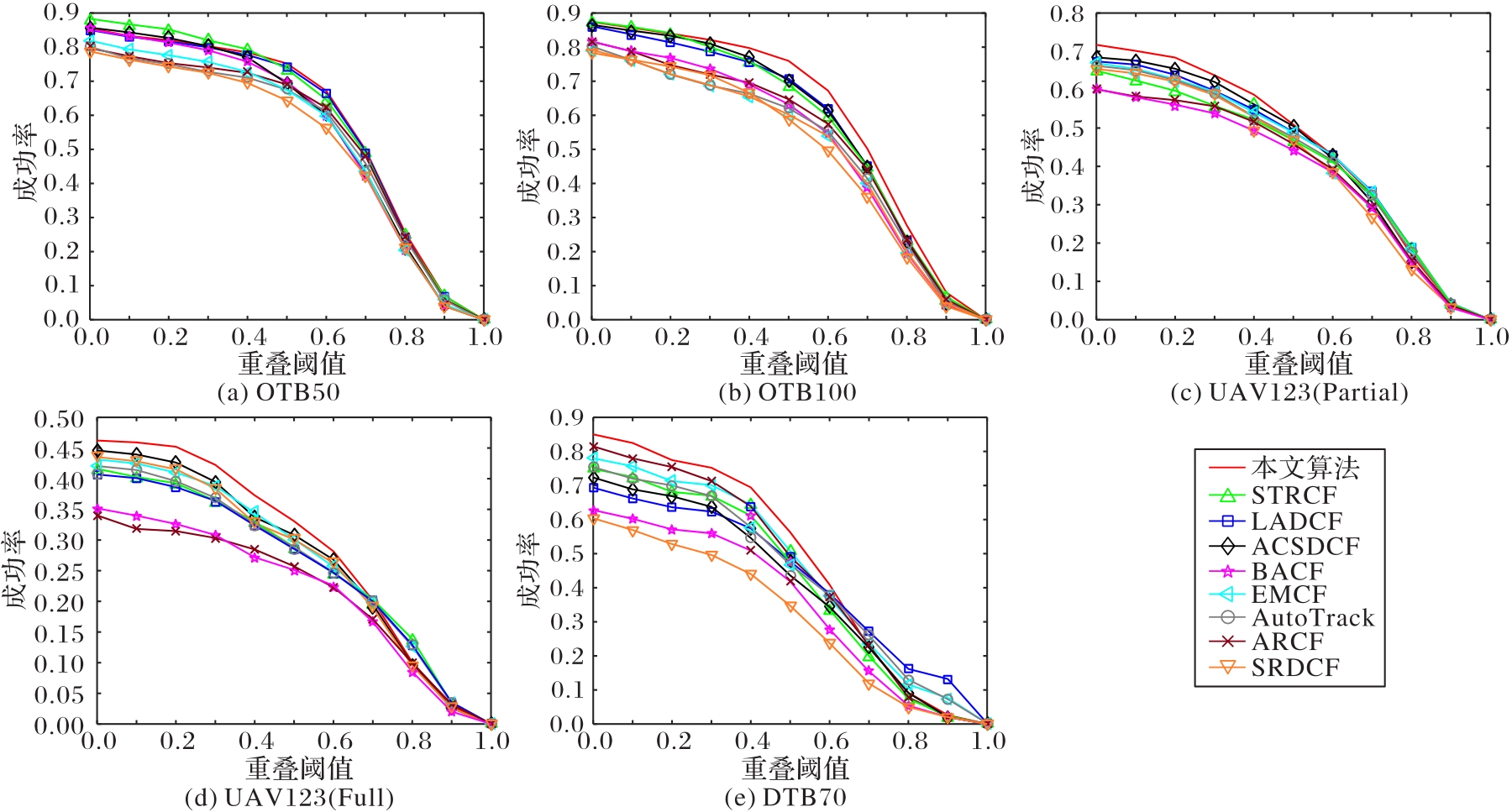
图9 各跟踪算法在遮挡属性下的成功率曲线
Fig. 9 Success rate curves of various tracking algorithms for occlusion sequence
| 算法 | OTB50数据集 | OTB100数据集 | UAV123数据集(Partail) | UAV123数据集(Full) | DTB70数据集 | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| DP | AUC | DP | AUC | DP | AUC | DP | AUC | DP | AUC | |
| 本文算法 | 0.798 | 0.752 | 0.797 | 0.760 | 0.645 | 0.506 | 0.518 | 0.321 | 0.706 | 0.476 |
| STRCF算法 | 0.798 | 0.736 | 0.763 | 0.689 | 0.587 | 0.468 | 0.488 | 0.289 | 0.599 | 0.425 |
| LADCF算法 | 0.794 | 0.743 | 0.761 | 0.707 | 0.619 | 0.489 | 0.481 | 0.285 | 0.663 | 0.434 |
| EMCF算法 | 0.750 | 0.675 | 0.666 | 0.602 | 0.614 | 0.488 | 0.506 | 0.301 | 0.648 | 0.449 |
| BACF算法 | 0.756 | 0.699 | 0.686 | 0.632 | 0.568 | 0.442 | 0.436 | 0.251 | 0.515 | 0.347 |
| ACSDCF算法 | 0.771 | 0.694 | 0.756 | 0.702 | 0.637 | 0.505 | 0.509 | 0.308 | 0.617 | 0.400 |
| AutoTrack算法 | 0.738 | 0.678 | 0.688 | 0.621 | 0.610 | 0.475 | 0.491 | 0.288 | 0.631 | 0.415 |
| ARCF算法 | 0.728 | 0.690 | 0.704 | 0.647 | 0.558 | 0.458 | 0.405 | 0.257 | 0.688 | 0.447 |
| SRDCF算法 | 0.697 | 0.643 | 0.650 | 0.588 | 0.608 | 0.468 | 0.501 | 0.301 | 0.478 | 0.310 |
表2 遮挡属性下各算法在4个标准数据集上的对比结果
Tab. 2 Comparison results of various algorithms on 4 standard datasets under occlusion property
| 算法 | OTB50数据集 | OTB100数据集 | UAV123数据集(Partail) | UAV123数据集(Full) | DTB70数据集 | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| DP | AUC | DP | AUC | DP | AUC | DP | AUC | DP | AUC | |
| 本文算法 | 0.798 | 0.752 | 0.797 | 0.760 | 0.645 | 0.506 | 0.518 | 0.321 | 0.706 | 0.476 |
| STRCF算法 | 0.798 | 0.736 | 0.763 | 0.689 | 0.587 | 0.468 | 0.488 | 0.289 | 0.599 | 0.425 |
| LADCF算法 | 0.794 | 0.743 | 0.761 | 0.707 | 0.619 | 0.489 | 0.481 | 0.285 | 0.663 | 0.434 |
| EMCF算法 | 0.750 | 0.675 | 0.666 | 0.602 | 0.614 | 0.488 | 0.506 | 0.301 | 0.648 | 0.449 |
| BACF算法 | 0.756 | 0.699 | 0.686 | 0.632 | 0.568 | 0.442 | 0.436 | 0.251 | 0.515 | 0.347 |
| ACSDCF算法 | 0.771 | 0.694 | 0.756 | 0.702 | 0.637 | 0.505 | 0.509 | 0.308 | 0.617 | 0.400 |
| AutoTrack算法 | 0.738 | 0.678 | 0.688 | 0.621 | 0.610 | 0.475 | 0.491 | 0.288 | 0.631 | 0.415 |
| ARCF算法 | 0.728 | 0.690 | 0.704 | 0.647 | 0.558 | 0.458 | 0.405 | 0.257 | 0.688 | 0.447 |
| SRDCF算法 | 0.697 | 0.643 | 0.650 | 0.588 | 0.608 | 0.468 | 0.501 | 0.301 | 0.478 | 0.310 |
| 算法 | IV | SV | OCC | DEF | MB | FM | IPR | OPR | OV | BC | LR |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 本文算法 | 0.813 | 0.797 | 0.771 | 0.816 | 0.835 | 0.778 | |||||
| LADCF算法 | 0.762 | 0.793 | 0.761 | 0.753 | 0.740 | 0.738 | 0.788 | 0.736 | 0.742 | 0.661 | |
| SRDCF算法 | 0.729 | 0.691 | 0.650 | 0.696 | 0.648 | 0.651 | 0.731 | 0.685 | 0.605 | 0.677 | 0.538 |
| BACF算法 | 0.754 | 0.748 | 0.686 | 0.752 | 0.667 | 0.748 | 0.755 | 0.746 | 0.684 | 0.727 | 0.669 |
| STRCF算法 | 0.780 | 0.788 | 0.765 | 0.752 | 0.789 | 0.797 | 0.717 | 0.798 | 0.672 | ||
| ARCF算法 | 0.715 | 0.757 | 0.704 | 0.702 | 0.725 | 0.715 | 0.715 | 0.723 | 0.693 | 0.663 | |
| AutoTrack算法 | 0.719 | 0.731 | 0.688 | 0.699 | 0.688 | 0.684 | 0.727 | 0.721 | 0.679 | 0.705 | 0.671 |
| ACSDCF算法 | 0.761 | 0.775 | 0.756 | 0.730 | 0.765 | 0.778 | 0.667 | 0.741 | 0.767 | ||
| EMCF算法 | 0.749 | 0.723 | 0.666 | 0.752 | 0.678 | 0.720 | 0.741 | 0.728 | 0.582 | 0.746 | 0.656 |
表3 各对比算法在OTB100中各属性的DP得分
Tab. 3 DP scores of attributes in OTB100 for different comparison algorithms
| 算法 | IV | SV | OCC | DEF | MB | FM | IPR | OPR | OV | BC | LR |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 本文算法 | 0.813 | 0.797 | 0.771 | 0.816 | 0.835 | 0.778 | |||||
| LADCF算法 | 0.762 | 0.793 | 0.761 | 0.753 | 0.740 | 0.738 | 0.788 | 0.736 | 0.742 | 0.661 | |
| SRDCF算法 | 0.729 | 0.691 | 0.650 | 0.696 | 0.648 | 0.651 | 0.731 | 0.685 | 0.605 | 0.677 | 0.538 |
| BACF算法 | 0.754 | 0.748 | 0.686 | 0.752 | 0.667 | 0.748 | 0.755 | 0.746 | 0.684 | 0.727 | 0.669 |
| STRCF算法 | 0.780 | 0.788 | 0.765 | 0.752 | 0.789 | 0.797 | 0.717 | 0.798 | 0.672 | ||
| ARCF算法 | 0.715 | 0.757 | 0.704 | 0.702 | 0.725 | 0.715 | 0.715 | 0.723 | 0.693 | 0.663 | |
| AutoTrack算法 | 0.719 | 0.731 | 0.688 | 0.699 | 0.688 | 0.684 | 0.727 | 0.721 | 0.679 | 0.705 | 0.671 |
| ACSDCF算法 | 0.761 | 0.775 | 0.756 | 0.730 | 0.765 | 0.778 | 0.667 | 0.741 | 0.767 | ||
| EMCF算法 | 0.749 | 0.723 | 0.666 | 0.752 | 0.678 | 0.720 | 0.741 | 0.728 | 0.582 | 0.746 | 0.656 |
| 算法 | IV | SV | OCC | DEF | MB | FM | IPR | OPR | OV | BC | LR |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 本文算法 | 0.762 | 0.769 | 0.760 | 0.740 | 0.755 | 0.788 | 0.708 | ||||
| LADCF算法 | 0.728 | 0.737 | 0.684 | 0.722 | 0.711 | 0.708 | 0.729 | 0.670 | 0.700 | 0.569 | |
| SRDCF算法 | 0.678 | 0.603 | 0.588 | 0.644 | 0.626 | 0.634 | 0.655 | 0.622 | 0.528 | 0.632 | 0.384 |
| BACF算法 | 0.730 | 0.700 | 0.632 | 0.690 | 0.661 | 0.727 | 0.689 | 0.686 | 0.594 | 0.692 | 0.571 |
| STRCF算法 | 0.728 | 0.689 | 0.731 | 0.711 | 0.715 | 0.656 | 0.760 | 0.572 | |||
| ARCF算法 | 0.677 | 0.675 | 0.647 | 0.596 | 0.681 | 0.672 | 0.613 | 0.633 | 0.645 | 0.645 | 0.549 |
| AutoTrack算法 | 0.671 | 0.646 | 0.621 | 0.604 | 0.646 | 0.642 | 0.617 | 0.620 | 0.581 | 0.626 | 0.551 |
| ACSDCF算法 | 0.714 | 0.702 | 0.691 | 0.756 | 0.765 | 0.720 | 0.723 | 0.745 | |||
| EMCF算法 | 0.706 | 0.644 | 0.602 | 0.642 | 0.677 | 0.649 | 0.641 | 0.540 | 0.713 | 0.591 |
表4 各对比算法在OTB100中各属性的AUC得分
Tab. 4 AUC scores of attributes in OTB100 for different comparison algorithms
| 算法 | IV | SV | OCC | DEF | MB | FM | IPR | OPR | OV | BC | LR |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 本文算法 | 0.762 | 0.769 | 0.760 | 0.740 | 0.755 | 0.788 | 0.708 | ||||
| LADCF算法 | 0.728 | 0.737 | 0.684 | 0.722 | 0.711 | 0.708 | 0.729 | 0.670 | 0.700 | 0.569 | |
| SRDCF算法 | 0.678 | 0.603 | 0.588 | 0.644 | 0.626 | 0.634 | 0.655 | 0.622 | 0.528 | 0.632 | 0.384 |
| BACF算法 | 0.730 | 0.700 | 0.632 | 0.690 | 0.661 | 0.727 | 0.689 | 0.686 | 0.594 | 0.692 | 0.571 |
| STRCF算法 | 0.728 | 0.689 | 0.731 | 0.711 | 0.715 | 0.656 | 0.760 | 0.572 | |||
| ARCF算法 | 0.677 | 0.675 | 0.647 | 0.596 | 0.681 | 0.672 | 0.613 | 0.633 | 0.645 | 0.645 | 0.549 |
| AutoTrack算法 | 0.671 | 0.646 | 0.621 | 0.604 | 0.646 | 0.642 | 0.617 | 0.620 | 0.581 | 0.626 | 0.551 |
| ACSDCF算法 | 0.714 | 0.702 | 0.691 | 0.756 | 0.765 | 0.720 | 0.723 | 0.745 | |||
| EMCF算法 | 0.706 | 0.644 | 0.602 | 0.642 | 0.677 | 0.649 | 0.641 | 0.540 | 0.713 | 0.591 |
| 算法 | SV | ARC | LR | FM | FOC | POC | OV | BC | IV | VC | CM | SO |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 本文算法 | 0.610 | 0.564 | 0.518 | 0.645 | 0.592 | 0.517 | 0.637 | 0.694 | ||||
| LADCF算法 | 0.660 | 0.620 | 0.588 | 0.481 | 0.619 | 0.568 | 0.494 | 0.558 | 0.598 | 0.672 | ||
| SRDCF算法 | 0.639 | 0.587 | 0.579 | 0.524 | 0.501 | 0.608 | 0.576 | 0.600 | 0.593 | 0.627 | 0.678 | |
| BACF算法 | 0.621 | 0.579 | 0.526 | 0.525 | 0.436 | 0.568 | 0.543 | 0.513 | 0.531 | 0.590 | 0.642 | 0.680 |
| STRCF算法 | 0.643 | 0.586 | 0.589 | 0.554 | 0.488 | 0.587 | 0.570 | 0.502 | 0.538 | 0.581 | 0.658 | 0.648 |
| ARCF算法 | 0.617 | 0.579 | 0.540 | 0.505 | 0.405 | 0.558 | 0.494 | 0.526 | 0.559 | 0.573 | 0.618 | 0.662 |
| AutoTrack算法 | 0.650 | 0.614 | 0.574 | 0.491 | 0.610 | 0.556 | 0.520 | 0.573 | 0.595 | 0.693 | ||
| ACSDCF算法 | 0.686 | 0.650 | 0.655 | 0.600 | 0.630 | 0.638 | 0.657 | 0.694 | 0.704 | |||
| EMCF算法 | 0.662 | 0.610 | 0.599 | 0.562 | 0.506 | 0.614 | 0.570 | 0.493 | 0.536 | 0.589 | 0.672 | 0.716 |
表5 各对比算法在UAV123中各属性的DP得分
Tab. 5 DP scores of attributes in UAV123 for different comparison algorithms
| 算法 | SV | ARC | LR | FM | FOC | POC | OV | BC | IV | VC | CM | SO |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 本文算法 | 0.610 | 0.564 | 0.518 | 0.645 | 0.592 | 0.517 | 0.637 | 0.694 | ||||
| LADCF算法 | 0.660 | 0.620 | 0.588 | 0.481 | 0.619 | 0.568 | 0.494 | 0.558 | 0.598 | 0.672 | ||
| SRDCF算法 | 0.639 | 0.587 | 0.579 | 0.524 | 0.501 | 0.608 | 0.576 | 0.600 | 0.593 | 0.627 | 0.678 | |
| BACF算法 | 0.621 | 0.579 | 0.526 | 0.525 | 0.436 | 0.568 | 0.543 | 0.513 | 0.531 | 0.590 | 0.642 | 0.680 |
| STRCF算法 | 0.643 | 0.586 | 0.589 | 0.554 | 0.488 | 0.587 | 0.570 | 0.502 | 0.538 | 0.581 | 0.658 | 0.648 |
| ARCF算法 | 0.617 | 0.579 | 0.540 | 0.505 | 0.405 | 0.558 | 0.494 | 0.526 | 0.559 | 0.573 | 0.618 | 0.662 |
| AutoTrack算法 | 0.650 | 0.614 | 0.574 | 0.491 | 0.610 | 0.556 | 0.520 | 0.573 | 0.595 | 0.693 | ||
| ACSDCF算法 | 0.686 | 0.650 | 0.655 | 0.600 | 0.630 | 0.638 | 0.657 | 0.694 | 0.704 | |||
| EMCF算法 | 0.662 | 0.610 | 0.599 | 0.562 | 0.506 | 0.614 | 0.570 | 0.493 | 0.536 | 0.589 | 0.672 | 0.716 |
| 算法 | SV | ARC | LR | FM | FOC | POC | OV | BC | IV | VC | CM | SO |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 本文算法 | 0.558 | 0.488 | 0.415 | 0.321 | 0.509 | 0.410 | 0.477 | 0.503 | 0.526 | 0.547 | ||
| LADCF算法 | 0.526 | 0.438 | 0.384 | 0.382 | 0.285 | 0.489 | 0.467 | 0.376 | 0.399 | 0.443 | 0.556 | |
| SRDCF算法 | 0.510 | 0.431 | 0.359 | 0.366 | 0.301 | 0.468 | 0.465 | 0.457 | 0.441 | 0.512 | 0.532 | |
| BACF算法 | 0.509 | 0.442 | 0.335 | 0.387 | 0.251 | 0.442 | 0.462 | 0.380 | 0.411 | 0.454 | 0.538 | 0.546 |
| STRCF算法 | 0.516 | 0.418 | 0.388 | 0.359 | 0.289 | 0.468 | 0.470 | 0.382 | 0.385 | 0.426 | 0.545 | 0.550 |
| ARCF算法 | 0.512 | 0.440 | 0.377 | 0.349 | 0.257 | 0.458 | 0.441 | 0.418 | 0.457 | 0.429 | 0.518 | 0.537 |
| AutoTrack算法 | 0.515 | 0.440 | 0.386 | 0.380 | 0.288 | 0.475 | 0.455 | 0.381 | 0.408 | 0.447 | 0.553 | 0.561 |
| ACSDCF算法 | 0.417 | 0.506 | 0.451 | 0.578 | 0.580 | |||||||
| EMCF算法 | 0.529 | 0.434 | 0.392 | 0.383 | 0.301 | 0.488 | 0.469 | 0.377 | 0.400 | 0.442 | 0.591 |
表6 各对比算法在UAV123中各属性的AUC得分
Tab. 6 AUC scores of attributes in UAV123 for different comparison algorithms
| 算法 | SV | ARC | LR | FM | FOC | POC | OV | BC | IV | VC | CM | SO |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 本文算法 | 0.558 | 0.488 | 0.415 | 0.321 | 0.509 | 0.410 | 0.477 | 0.503 | 0.526 | 0.547 | ||
| LADCF算法 | 0.526 | 0.438 | 0.384 | 0.382 | 0.285 | 0.489 | 0.467 | 0.376 | 0.399 | 0.443 | 0.556 | |
| SRDCF算法 | 0.510 | 0.431 | 0.359 | 0.366 | 0.301 | 0.468 | 0.465 | 0.457 | 0.441 | 0.512 | 0.532 | |
| BACF算法 | 0.509 | 0.442 | 0.335 | 0.387 | 0.251 | 0.442 | 0.462 | 0.380 | 0.411 | 0.454 | 0.538 | 0.546 |
| STRCF算法 | 0.516 | 0.418 | 0.388 | 0.359 | 0.289 | 0.468 | 0.470 | 0.382 | 0.385 | 0.426 | 0.545 | 0.550 |
| ARCF算法 | 0.512 | 0.440 | 0.377 | 0.349 | 0.257 | 0.458 | 0.441 | 0.418 | 0.457 | 0.429 | 0.518 | 0.537 |
| AutoTrack算法 | 0.515 | 0.440 | 0.386 | 0.380 | 0.288 | 0.475 | 0.455 | 0.381 | 0.408 | 0.447 | 0.553 | 0.561 |
| ACSDCF算法 | 0.417 | 0.506 | 0.451 | 0.578 | 0.580 | |||||||
| EMCF算法 | 0.529 | 0.434 | 0.392 | 0.383 | 0.301 | 0.488 | 0.469 | 0.377 | 0.400 | 0.442 | 0.591 |
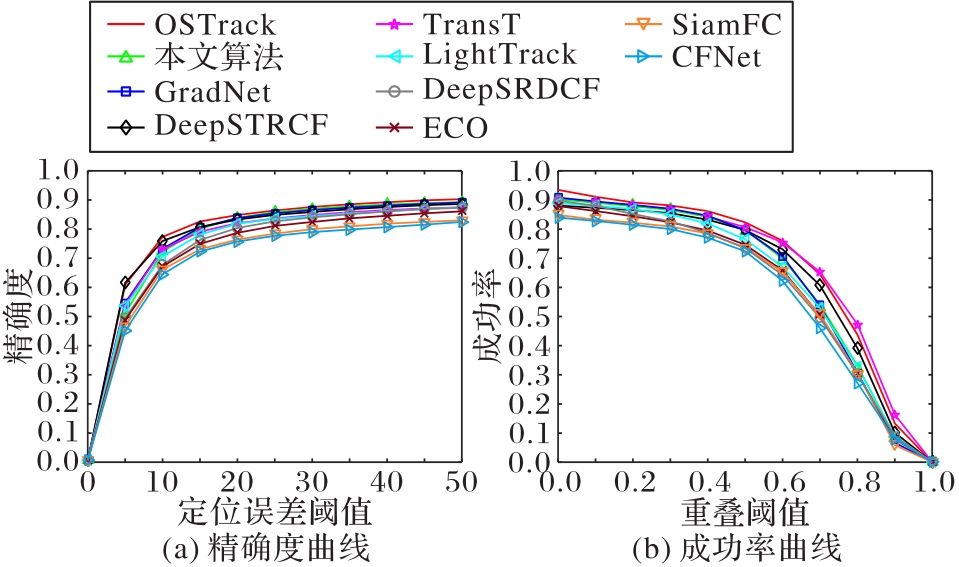
图10 本文算法与深度学习类跟踪算法在OTB100上的性能曲线
Fig. 10 Performance curves of proposed algorithm and deep learning tracking algorithms on OTB100 dataset
| OSTrack | 本文算法 | GradNet | DeepSTRCF | TransT | |||||
|---|---|---|---|---|---|---|---|---|---|
| DP | AUC | DP | AUC | DP | AUC | DP | AUC | DP | AUC |
| 0.848 | 0.823 | 0.838 | 0.789 | 0.837 | 0.796 | 0.833 | 0.797 | 0.820 | 0.807 |
| LightTrack | DeepSRDCF | ECO | SiamFC | CFNet | |||||
| DP | AUC | DP | AUC | DP | AUC | DP | AUC | DP | AUC |
| 0.818 | 0.765 | 0.804 | 0.735 | 0.787 | 0.746 | 0.764 | 0.736 | 0.757 | 0.724 |
表7 本文算法与深度学习类跟踪算法在OTB100上的定量比较结果
Tab. 7 Quantitative comparison results between proposed algorithm and deep learning tracking algorithms on OTB100 dataset
| OSTrack | 本文算法 | GradNet | DeepSTRCF | TransT | |||||
|---|---|---|---|---|---|---|---|---|---|
| DP | AUC | DP | AUC | DP | AUC | DP | AUC | DP | AUC |
| 0.848 | 0.823 | 0.838 | 0.789 | 0.837 | 0.796 | 0.833 | 0.797 | 0.820 | 0.807 |
| LightTrack | DeepSRDCF | ECO | SiamFC | CFNet | |||||
| DP | AUC | DP | AUC | DP | AUC | DP | AUC | DP | AUC |
| 0.818 | 0.765 | 0.804 | 0.735 | 0.787 | 0.746 | 0.764 | 0.736 | 0.757 | 0.724 |

图11 OTB100数据集上各算法跟踪结果对比
Fig. 11 Comparison of tracking results of various algorithms on OTB100 dataset

图12 UAV123数据集上各算法跟踪结果对比
Fig. 12 Comparison of tracking results of various algorithms on UAV123 dataset
| 算法 | FPS | 算法 | FPS |
|---|---|---|---|
| 本文算法 | 26.20 | ARCF算法 | 37.30 |
| LADCF算法 | 24.60 | AutoTrack算法 | 25.20 |
| SRDCF算法 | 13.13 | ACSDCF算法 | 31.79 |
| BACF算法 | 51.48 | EMCF算法 | 66.89 |
| STRCF算法 | 26.18 |
表8 各跟踪算法在OTB100数据集上的平均跟踪速度对比
Tab. 8 Comparison of average tracking speed among various algorithms on OTB100 dataset
| 算法 | FPS | 算法 | FPS |
|---|---|---|---|
| 本文算法 | 26.20 | ARCF算法 | 37.30 |
| LADCF算法 | 24.60 | AutoTrack算法 | 25.20 |
| SRDCF算法 | 13.13 | ACSDCF算法 | 31.79 |
| BACF算法 | 51.48 | EMCF算法 | 66.89 |
| STRCF算法 | 26.18 |
| 算法 | NTCT | NFU | DP | AUC |
|---|---|---|---|---|
| 算法1 | × | × | 0.814 | 0.760 |
| 算法2 | √ | × | 0.825 | 0.767 |
| 算法3 | × | √ | 0.820 | 0.782 |
| 算法4 | √ | √ | 0.838 | 0.798 |
表9 消融实验结果
Tab. 9 Results of ablation experiments
| 算法 | NTCT | NFU | DP | AUC |
|---|---|---|---|---|
| 算法1 | × | × | 0.814 | 0.760 |
| 算法2 | √ | × | 0.825 | 0.767 |
| 算法3 | × | √ | 0.820 | 0.782 |
| 算法4 | √ | √ | 0.838 | 0.798 |
| 1 | 韩瑞泽,冯伟,郭青,等.视频单目标跟踪研究进展综述[J].计算机学报, 2022,45(9):1877-1907. |
| HAN R Z, FENG W, GUO Q, et al. Single object tracking research: a survey[J]. Chinese Journal of Computers, 2022, 45(9): 1877-1907. | |
| 2 | 才华,寇婷婷,杨依宁,等.基于轨迹优化的三维车辆多目标跟踪[J/OL].吉林大学学报(工学版):1-9(2023-05-09)[2023-05-28].. |
| CAI H, KOU T T, YANG Y N,et al.Three-dimensional vehicle multi-target tracking based on trajectory optimization[J/OL]. Journal of Jilin University (Engineering and Technology Edition):1-9.(2023-05-09)[2023-05-28].. | |
| 3 | 张楠,史建华,亿吉,等.基于加权质心定位的井下移动目标实时跟踪方法[J].吉林大学学报(工学版),2023,53(5):1458-1464. |
| ZHANG N, SHI J H, YI J, et al. Real-time tracking method of underground moving target based on weighted centroid positioning[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(5): 1458-1464. | |
| 4 | 侯艳丽,王鑫涛,魏义仑,等.基于IMPSiamCAR孪生网络无人机目标跟踪算法[J].计算机应用研究,2023,40(1):315-320. |
| HOU Y L, WANG X T, WEI Y L, et al. Tracking algorithm of unmanned aerial vehicle targets based on IMPSiamCAR for siamese network[J]. Application Research of Computers, 2023, 40(1): 315-320. | |
| 5 | 刘艺,李蒙蒙,郑奇斌,等.视频目标跟踪算法综述[J].计算机科学与探索,2022,16(7):1504-1515. |
| LIU Y, LI M M, ZHENG Q B, et al. Survey on video object tracking algorithms[J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(7): 1504-1515. | |
| 6 | 黄月平,李小锋,杨小冈,等.基于相关滤波的视觉目标跟踪算法新进展[J].系统工程与电子技术,2021,43(8):2051-2065. |
| HUANG Y P, LI X F, YANG X G, et al. Advances in visual object tracking algorithm based on correlation filter[J]. Systems Engineering and Electronics, 2021, 43(8): 2051-2065. | |
| 7 | BOLME D S, BEVERIDGE J R, DRAPER B A, et al. Visual object tracking using adaptive correlation filters [C]// Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Washington, DC: IEEE Computer Society,2010: 2544-2550. |
| 8 | DANELLJAN M, HÄGER G, KHAN F S, et al. Accurate scale estimation for robust visual tracking [C]// Proceedings of the 2014 British Machine Vision Conference. Nottingham: British Machine Vision Association, 2014: 384-393. |
| 9 | HENRIQUES J F, CASEIRO R, MARTINS P, et al. High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(3): 583-596. |
| 10 | DALAL N, TRIGGS B. Histograms of oriented gradients for human detection [C]// Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Washington, DC: IEEE Computer Society, 2005: 886-893. |
| 11 | DANELLJAN M, HÄGER G, KHAN F S, et al. Learning spatially regularized correlation filters for visual tracking [C]// Proceedings of the 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2015: 4310-4318. |
| 12 | GALOOGAHI H K, FAGG A, LUCEY S. Learning background-aware correlation filters for visual tracking [C]∥ Proceedings of the 2017 International Conference on Computer Vision. Piscataway: IEEE, 2017: 1144-1152. |
| 13 | LI F, TIAN C, ZUO W, et al. Learning spatial-temporal regularized correlation filters for visual tracking [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 4904-4913. |
| 14 | HUANG Z, FU C, LI Y, et al. Learning aberrance repressed correlation filters for real-time UAV tracking [C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 2891-2900. |
| 15 | XU T, FENG Z-H, WU X-J, et al. Learning adaptive discriminative correlation filters via temporal consistency preserving spatial feature selection for robust visual object tracking[J]. IEEE Transactions on Image Processing, 2019, 28(11): 5596-5609. |
| 16 | LI Y, FU C, DING F, et al. AutoTrack: towards high-performance visual tracking for UAV with automatic spatio-temporal regularization [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 11920-11929. |
| 17 | XU T, FENG Z, WU X-J, et al. Adaptive channel selection for robust visual object tracking with discriminative correlation filters[J]. International Journal of Computer Vision, 2021, 129: 1359-1375. |
| 18 | ZHANG F, MA S, ZHANG Y, et al. Perceiving temporal environment for correlation filters in real-time UAV tracking[J]. IEEE Signal Processing Letters, 2022, 29: 6-10. |
| 19 | 孙子文,钱立志,杨传栋,等.基于Transformer的视觉目标跟踪方法综述[J].计算机应用, 2024, 44(5): 1644-1654. |
| SUN Z W, QIAN L Z, YANG C D, et al. Survey of visual object tracking methods based on Transformer[J]. Journal of Computer Applications, 2024, 44(5): 1644-1654. | |
| 20 | WANG G, LUO C, SUN X, et al. Tracking by instance detection: a meta-learning approach [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 6287-6296. |
| 21 | 徐健,张林耀,袁皓,等.ATOM多注意力融合工件跟踪方法研究[J].光电子·激光,2022,33(10):1047-1054. |
| XU J, ZHANG L Y, YUAN H, et al. Research on ATOM multi-attention fusion workpiece tracking method[J]. Journal of Optoelectronics·Laser, 2022, 33(10): 1047-1054. | |
| 22 | BERTINETTO L, VALMADRE J, HENRIQUES J F, et al. Fully convolutional siamese networks for object tracking [C]// Proceedings of the 14th European Conference on Computer Vision. Cham: Springer, 2016: 850-865. |
| 23 | VALMADRE J, BERTINETTO L, HENRIQUES J, et al. End-to-end representation learning for correlation filter based tracking [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 5000-5008. |
| 24 | CHEN X, YAN B, ZHU J, et al. Transformer tracking [C]// Proceedings of the 2021 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 8122-8131. |
| 25 | 张天路,张强.基于深度学习的RGB-T目标跟踪技术综述[J].模式识别与人工智能,2023,36(4):327-353. |
| ZHANG T L, ZHANG Q. A survey of RGB-T object tracking technologies based on deep learning[J]. Pattern Recognition and Artificial Intelligence, 2023, 36(4): 327-353. | |
| 26 | 张长弓,杨海涛,王晋宇,等.基于深度学习的视觉单目标跟踪综述[J].计算机应用研究,2021,38(10):2888-2895. |
| ZHANG C G, YANG H T, WANG J Y, et al. Survey on visual single object tracking based on deep learning[J]. Application Research of Computers, 2021, 38(10): 2888-2895. | |
| 27 | STEVENS S S. To honor Fechner and repeal his law: a power function, not a log function, describes the operating characteristic of a sensory system[J]. Science, 1961, 133(3446): 80-86. |
| 28 | 韦联福.再谈拉格朗日函数非唯一性的物理意义:广义规范变换和正则变换的等价性证明[J].物理与工程,2021,31(2):31-35,40. |
| WEI L F. Remarks on the non-uniqueness of Lagrange function: an equivalence proof between the gauge and canonical transformations[J]. Physics and Engineering, 2021, 31(2): 31-35, 40. | |
| 29 | 姜文涛,刘晓璇,涂潮,等.自适应空间异常的目标跟踪[J].电子与信息学报,2022,44(2):523-533. |
| JIANG W T, LIU X X, TU C, et al. Adaptive spatial and anomaly target tracking[J]. Journal of Electronics & Information Technology, 2022, 44(2): 523-533. | |
| 30 | WU Y, LIM J, YANG M-H. Online object tracking: a benchmark [C]// Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2013: 2411-2418. |
| 31 | WU Y, LIM J, YANG M-H. Object tracking benchmark[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1834-1848. |
| 32 | MUELLER M, SMITH N, GHANEM B. A benchmark and simulator for UAV tracking [C]// Proceedings of the 14th IEEE European Conference on Computer Vision. Cham: Springer, 2016: 445-461. |
| 33 | LI S, D-Y YEUNG. Visual object tracking for unmanned aerial vehicles: a benchmark and new motion models [J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2017, 31(1): 4140-4146. |
| 34 | DANELLJAN M, HAGER G, KHAN F S, et al. Convolutional features for correlation filter based visual tracking [C]// Proceedings of the 2015 IEEE International Conference on Computer Vision Workshop. Piscataway: IEEE, 2015:621-629. |
| 35 | DANELLJAN M, BHAT G, KHAN F S, et al. ECO: efficient convolution operators for tracking [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 6931-6939. |
| 36 | LI P, CHEN B, OUYANG W, et al. GradNet: gradient-guided network for visual object tracking [C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 6161-6170. |
| 37 | YAN B, PENG H, WU K, et al. LightTrack: finding lightweight neural networks for object tracking via one-shot architecture search [C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 15175-15184. |
| 38 | YE B, CHANG H, MA B, et al. Joint feature learning and relation modeling for tracking: a one-stream framework [C]// Proceedings of the 17th European Conference on Computer Vision. Cham: Springer, 2022: 341-357. |
| [1] | 孙子文, 钱立志, 杨传栋, 高一博, 陆庆阳, 袁广林. 基于Transformer的视觉目标跟踪方法综述[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1644-1654. |
| [2] | 崔晨辉, 蔺素珍, 李大威, 禄晓飞, 武杰. 基于孪生网络和Transformer的红外弱小目标跟踪方法[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 563-571. |
| [3] | 廖存燚, 郑毅, 刘玮瑾, 于欢, 刘守印. 自动驾驶环境感知多任务去耦-融合算法[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 424-431. |
| [4] | 唐鑫, 彭博, 滕飞. 基于状态信息的红外小目标跟踪方法[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1938-1942. |
| [5] | 王利, 宣士斌, 秦续阳, 李紫薇. 基于双解码器的Transformer多目标跟踪方法[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1919-1929. |
| [6] | 赵元龙, 单玉刚, 袁杰, 赵康迪. 基于实例分割与毕达哥拉斯模糊决策的目标跟踪[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1930-1937. |
| [7] | 张广耀, 宋纯锋. 融合人体全身表观特征的行人头部跟踪模型[J]. 《计算机应用》唯一官方网站, 2023, 43(5): 1372-1377. |
| [8] | 窦光义, 魏发南, 邱创一, 巢建树. 基于注意力自相关机制的跟踪外观特征[J]. 《计算机应用》唯一官方网站, 2023, 43(4): 1248-1254. |
| [9] | 王梦亭, 杨文忠, 武雍智. 基于孪生网络的单目标跟踪算法综述[J]. 《计算机应用》唯一官方网站, 2023, 43(3): 661-673. |
| [10] | 公海涛, 陈志华, 盛斌, 祝冰艳. 基于孪生网络和Transformer的小目标跟踪算法SiamTrans[J]. 《计算机应用》唯一官方网站, 2023, 43(12): 3733-3739. |
| [11] | 薛远亮, 金国栋, 谭力宁, 许剑锟. 基于像素分类的多尺度无人机航拍目标旋转跟踪算法[J]. 《计算机应用》唯一官方网站, 2022, 42(7): 2239-2247. |
| [12] | 庄屹, 赵海涛. 面向三维点云单目标跟踪的提案聚合网络[J]. 《计算机应用》唯一官方网站, 2022, 42(5): 1407-1416. |
| [13] | 黄勇康, 梁美玉, 王笑笑, 陈徵, 曹晓雯. 基于深度时空残差卷积神经网络的课堂教学视频中多人课堂行为识别[J]. 《计算机应用》唯一官方网站, 2022, 42(3): 736-742. |
| [14] | 朱文球, 邹广, 曾志高. 融合层次特征和混合注意力的目标跟踪算法[J]. 《计算机应用》唯一官方网站, 2022, 42(3): 833-843. |
| [15] | 姬张建, 任兴旺. 带旋转与尺度估计的全卷积孪生网络目标跟踪算法[J]. 计算机应用, 2021, 41(9): 2705-2711. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||