


《计算机应用》唯一官方网站 ›› 2023, Vol. 43 ›› Issue (6): 1930-1937.DOI: 10.11772/j.issn.1001-9081.2022050674
所属专题: 多媒体计算与计算机仿真
赵元龙1, 单玉刚2( ), 袁杰1, 赵康迪1
), 袁杰1, 赵康迪1
收稿日期:2022-05-11
修回日期:2023-02-15
接受日期:2023-02-15
发布日期:2023-06-08
出版日期:2023-06-10
通讯作者:
单玉刚
作者简介:赵元龙(1994—),男,湖北襄阳人,硕士研究生,主要研究方向:目标跟踪、目标检测基金资助:
Yuanlong ZHAO1, Yugang SHAN2(), Jie YUAN1, Kangdi ZHAO1
Received:2022-05-11
Revised:2023-02-15
Accepted:2023-02-15
Online:2023-06-08
Published:2023-06-10
Contact:
Yugang SHAN
About author:ZHAO Yuanlong, born in 1994, M. S. candidate. His research interests include object tracking, object detection.Supported by:摘要:
为了解决目标跟踪中的尺度变化、相似性干扰、遮挡等问题,提出一种基于实例分割与毕达哥拉斯模糊决策的目标跟踪算法。在实例分割网络YOLACT++ (improved You Only Look At CoefficienTs)的基础上,融合3种不同的匹配方式针对不同场景预测跟踪结果;同时提出一种基于毕达哥拉斯模糊决策的模板更新机制,即根据预测结果的质量作出是否更新目标模板和更换匹配方式的决定。实验结果表明,所提算法能够更准确地跟踪存在尺度变化、相似性干扰、遮挡等问题的视频序列。相较于SiamMask算法,所提算法在DAVIS 2016、DAVIS 2017数据集上的区域相似度分别提高了12.3、15.3个百分点,在VOT2016、VOT2018数据集上的预期平均重叠率(EAO)分别提高了4.2、4.1个百分点,且所提算法的平均跟踪速度为每秒32.00帧,满足实时性要求。
中图分类号:
赵元龙, 单玉刚, 袁杰, 赵康迪. 基于实例分割与毕达哥拉斯模糊决策的目标跟踪[J]. 计算机应用, 2023, 43(6): 1930-1937.
Yuanlong ZHAO, Yugang SHAN, Jie YUAN, Kangdi ZHAO. Object tracking based on instance segmentation and Pythagorean fuzzy decision-making[J]. Journal of Computer Applications, 2023, 43(6): 1930-1937.

图1 目标模板
Fig. 1 Object template

图2 本文算法的跟踪框架
Fig. 2 Tracking framework of the proposed algorithm

图3 搜索区域reg
Fig. 3 Region of search reg

图4 加入SPP的孪生网络框架
Fig. 4 Architecture of Siamese network with SPP

图5 改进后的SPP
Fig. 5 Improved SPP
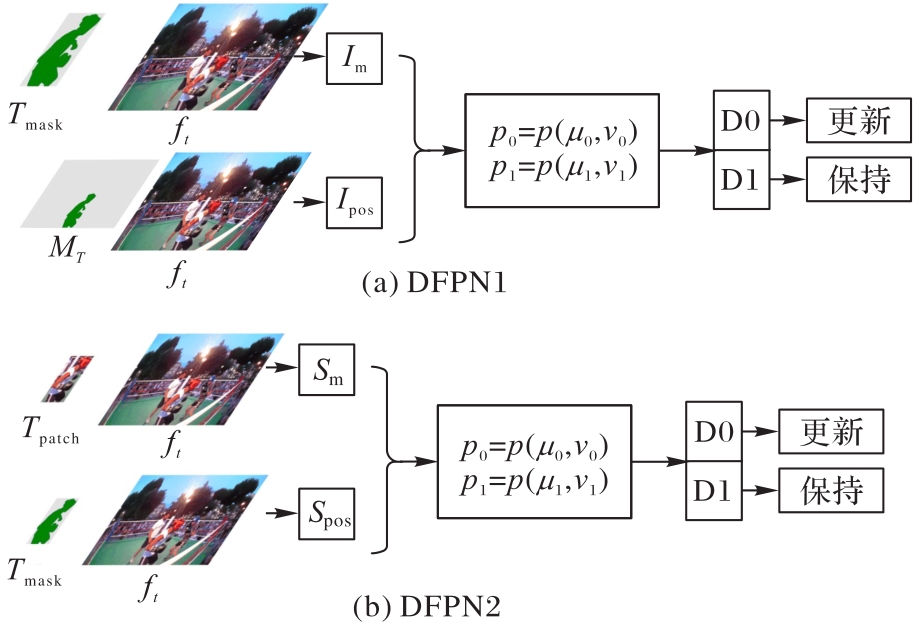
图6 模板更新机制DFPN
Fig. 6 Template update mechanism DFPN
| 算法 | OL | M | DAVIS 2016 | DAVIS 2017 | 运行速度/ (frame·s-1) | ||||
|---|---|---|---|---|---|---|---|---|---|
| J&F | J | F | J&F | J | F | ||||
| OnAVOS | √ | √ | 0.855 0 | 0.861 | 0.849 | 0.678 5 | 0.645 | 0.712 | 0.08 |
| OSVOS | √ | √ | 0.802 0 | 0.798 | 0.806 | 0.602 5 | 0.566 | 0.639 | 0.10 |
| OSVOSS | √ | √ | — | — | — | 0.680 0 | 0.647 | 0.713 | 0.22 |
| MSK | √ | √ | 0.775 5 | 0.797 | 0.754 | — | — | — | 0.10 |
| FAVOS | × | √ | 0.809 5 | 0.824 | 0.795 | 0.582 0 | 0.546 | 0.618 | 0.80 |
| RGMP | × | √ | 0.817 5 | 0.815 | 0.820 | 0.667 0 | 0.648 | 0.689 | 8.00 |
| OSMN | × | √ | 0.734 5 | 0.740 | 0.729 | 0.548 0 | 0.525 | 0.571 | 8.00 |
| SiamMask | × | × | 0.697 5 | 0.717 | 0.678 | 0.564 0 | 0.543 | 0.585 | 55.00 |
| 本文算法 | × | × | 0.836 5 | 0.840 | 0.833 | 0.690 5 | 0.696 | 0.685 | 32.00 |
表1 不同算法在DAVIS 2016与DAVIS 2017数据集上的实验结果
Tab. 1 Experimental results of different algorithms on DAVIS 2016 and DAVIS 2017 datasets
| 算法 | OL | M | DAVIS 2016 | DAVIS 2017 | 运行速度/ (frame·s-1) | ||||
|---|---|---|---|---|---|---|---|---|---|
| J&F | J | F | J&F | J | F | ||||
| OnAVOS | √ | √ | 0.855 0 | 0.861 | 0.849 | 0.678 5 | 0.645 | 0.712 | 0.08 |
| OSVOS | √ | √ | 0.802 0 | 0.798 | 0.806 | 0.602 5 | 0.566 | 0.639 | 0.10 |
| OSVOSS | √ | √ | — | — | — | 0.680 0 | 0.647 | 0.713 | 0.22 |
| MSK | √ | √ | 0.775 5 | 0.797 | 0.754 | — | — | — | 0.10 |
| FAVOS | × | √ | 0.809 5 | 0.824 | 0.795 | 0.582 0 | 0.546 | 0.618 | 0.80 |
| RGMP | × | √ | 0.817 5 | 0.815 | 0.820 | 0.667 0 | 0.648 | 0.689 | 8.00 |
| OSMN | × | √ | 0.734 5 | 0.740 | 0.729 | 0.548 0 | 0.525 | 0.571 | 8.00 |
| SiamMask | × | × | 0.697 5 | 0.717 | 0.678 | 0.564 0 | 0.543 | 0.585 | 55.00 |
| 本文算法 | × | × | 0.836 5 | 0.840 | 0.833 | 0.690 5 | 0.696 | 0.685 | 32.00 |
| 数据集 | 算法 | A | R | EAO |
|---|---|---|---|---|
| VOT2016 | SiamMask | 0.640 | 0.214 | 0.433 |
| ATOM | 0.610 | 0.180 | 0.430 | |
| ECO | 0.550 | 0.200 | 0.375 | |
| ASRCF | 0.560 | 0.187 | 0.391 | |
| C-COT | 0.540 | 0.238 | 0.331 | |
| TCNN | 0.550 | 0.268 | 0.325 | |
| SiamRPN | 0.560 | 0.302 | 0.344 | |
| DaSiamRPN | 0.610 | 0.220 | 0.411 | |
| SiamRPN++ | 0.640 | 0.200 | 0.464 | |
| 本文算法 | 0.620 | 0.142 | 0.475 | |
| VOT2018 | SiamMask | 0.610 | 0.276 | 0.380 |
| ATOM | 0.590 | 0.204 | 0.401 | |
| ECO | 0.484 | 0.276 | 0.280 | |
| LADCF | 0.510 | 0.159 | 0.389 | |
| SPM | 0.580 | 0.300 | 0.338 | |
| RCO | 0.507 | 0.155 | 0.376 | |
| UPDT | 0.536 | 0.184 | 0.379 | |
| MFT | 0.505 | 0.140 | 0.386 | |
| GFS-DCF | 0.510 | 0.140 | 0.397 | |
| 本文算法 | 0.586 | 0.183 | 0.421 |
表2 在不同数据集上的实验结果对比
Tab. 2 Comparison of experimental results on different datasets
| 数据集 | 算法 | A | R | EAO |
|---|---|---|---|---|
| VOT2016 | SiamMask | 0.640 | 0.214 | 0.433 |
| ATOM | 0.610 | 0.180 | 0.430 | |
| ECO | 0.550 | 0.200 | 0.375 | |
| ASRCF | 0.560 | 0.187 | 0.391 | |
| C-COT | 0.540 | 0.238 | 0.331 | |
| TCNN | 0.550 | 0.268 | 0.325 | |
| SiamRPN | 0.560 | 0.302 | 0.344 | |
| DaSiamRPN | 0.610 | 0.220 | 0.411 | |
| SiamRPN++ | 0.640 | 0.200 | 0.464 | |
| 本文算法 | 0.620 | 0.142 | 0.475 | |
| VOT2018 | SiamMask | 0.610 | 0.276 | 0.380 |
| ATOM | 0.590 | 0.204 | 0.401 | |
| ECO | 0.484 | 0.276 | 0.280 | |
| LADCF | 0.510 | 0.159 | 0.389 | |
| SPM | 0.580 | 0.300 | 0.338 | |
| RCO | 0.507 | 0.155 | 0.376 | |
| UPDT | 0.536 | 0.184 | 0.379 | |
| MFT | 0.505 | 0.140 | 0.386 | |
| GFS-DCF | 0.510 | 0.140 | 0.397 | |
| 本文算法 | 0.586 | 0.183 | 0.421 |

图7 在不同视频序列上的定性对比
Fig. 7 Qualitative comparison on different video sequences
| 模型 | MaskIoU | Appearance | KF | DFPN1 | DFPN2 | EAO | J | 跟踪速度/ (frame·s-1) |
|---|---|---|---|---|---|---|---|---|
| MaskIoU_based | √ | 0.334 | 0.613 | 48 | ||||
| Appearance_based | √ | 0.386 | 0.667 | 19 | ||||
| MaskIoU+Appearance+DFPN1 | √ | √ | √ | 0.403 | 0.696 | 32 | ||
| 本文模型 | √ | √ | √ | √ | √ | 0.421 | 0.696 | 32 |
表3 消融实验对比结果
Tab. 3 Comparative results of ablation experiments
| 模型 | MaskIoU | Appearance | KF | DFPN1 | DFPN2 | EAO | J | 跟踪速度/ (frame·s-1) |
|---|---|---|---|---|---|---|---|---|
| MaskIoU_based | √ | 0.334 | 0.613 | 48 | ||||
| Appearance_based | √ | 0.386 | 0.667 | 19 | ||||
| MaskIoU+Appearance+DFPN1 | √ | √ | √ | 0.403 | 0.696 | 32 | ||
| 本文模型 | √ | √ | √ | √ | √ | 0.421 | 0.696 | 32 |

图8 本文算法在VOT和DAVIS数据集上的定性分析结果
Fig. 8 Qualitative analysis results of the proposed algorithm on VOT and DAVIS datasets
| 1 | 李玺,查宇飞,张天柱,等. 深度学习的目标跟踪算法综述[J]. 中国图象图形学报, 2019, 24(12): 2057-2080. 10.11834/jig.190372 |
| LI X, ZHA Y F, ZHANG T Z, et al. Survey of visual object tracking algorithms based on deep learning [J]. Journal of Image and Graphics, 2019, 24(12): 2057-2080. 10.11834/jig.190372 | |
| 2 | DANELLJAN M, HAGER G, KHAN F S, et al. Convolutional features for correlation filter based visual tracking [C]// Proceedings of the 2015 IEEE International Conference on Computer Vision Workshops. Piscataway: IEEE, 2015:621-629. 10.1109/iccvw.2015.84 |
| 3 | BERTINETTO L, VALMADRE J, HENRIQUES J F, et al. Fully-convolutional Siamese networks for object tracking[C]// Proceedings of the 2016 European Conference on Computer Vision, LNCS 9914. Cham: Springer, 2016:850-865. |
| 4 | DANELLJAN M, ROBINSON A, KHAN F S, et al. Beyond correlation filters: learning continuous convolution operators for visual tracking [C]// Proceedings of the 2016 European Conference on Computer Vision, LNCS 9909. Cham: Springer, 2016:472-488. |
| 5 | DANELLJAN M, BHAT G, KHAN F S, et al. ECO: efficient convolution operators for tracking[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017:6931-6939. 10.1109/cvpr.2017.733 |
| 6 | NAM H, BAEK M, HAN B. Modeling and propagating CNNs in a tree structure for visual tracking [EB/OL]. (2016-08-25) [2022-03-10].. |
| 7 | LI B, YAN J J, WU W, et al. High performance visual tracking with Siamese region proposal network [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 8971-8980. 10.1109/cvpr.2018.00935 |
| 8 | WANG Q, ZHANG L, BERTINETTO L, et al. Fast online object tracking and segmentation: a unifying approach [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019:1328-1338. 10.1109/cvpr.2019.00142 |
| 9 | PENG X D, MA X L. Pythagorean fuzzy multi-criteria decision making method based on CODAS with new score function[J]. Journal of Intelligent and Fuzzy Systems, 2020, 38(3):3307-3318. 10.3233/jifs-190043 |
| 10 | BOLYA D, ZHOU C, XIAO F, et al. YOLACT++: better real-time instance segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(2):1108-1121. 10.1109/tpami.2020.3014297 |
| 11 | RGEY Z, NIKOS K. Learning to compare image patches via convolutional neural networks [C]// Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2015: 4353-4361. 10.1109/cvpr.2015.7299064 |
| 12 | PERAZZI F, PONT-TUSET J, McWILLIAMS B, et al. A benchmark dataset and evaluation methodology for video object segmentation [C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016:724-732. 10.1109/cvpr.2016.85 |
| 13 | PONT-TUSET J, PERAZZI F, CAELLES S, et al. The 2017 DAVIS challenge on video object segmentation [EB/OL]. (2018-03-01) [2022-03-10].. 10.1109/cvpr.2017.565 |
| 14 | VOIGTLAENDER P, LEIBE B. Online adaptation of convolutional neural networks for video object segmentation [C]// Proceedings of the 2017 British Machine Vision Conference. Durham: BMVA Press, 2017: No.116. 10.5244/c.31.116 |
| 15 | CAELLES S, MANINIS K K, PONT-TUSET J, et al. One-shot video object segmentation[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017:5320-5329. 10.1109/cvpr.2017.565 |
| 16 | MANINIS K K, CAELLES S, CHEN Y, et al. Video object segmentation without temporal information [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2019, 41(6): 1515-1530. 10.1109/tpami.2018.2838670 |
| 17 | PERAZZI F, KHOREVA A, BENENSON R, et al. Learning video object segmentation from static images [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 3491-3500. 10.1109/cvpr.2017.372 |
| 18 | CHENG J C, TSAI Y H, HUNG W C, et al. Fast and accurate online video object segmentation via tracking parts[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018:7415-7424. 10.1109/cvpr.2018.00774 |
| 19 | OH S W, LEE J Y, SUNKAVALLI K, et al. Fast video object segmentation by reference-guided mask propagation[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 7376-7385. 10.1109/cvpr.2018.00770 |
| 20 | YANG L J, WANG Y R, XIONG X H, et al. Efficient video object segmentation via network modulation [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018:6499-6507. 10.1109/cvpr.2018.00680 |
| 21 | KRISTAN M, LEONARDIS A, MATAS J, et al. The visual object tracking VOT2016 challenge results [C]// Proceedings of the 2016 European Conference on Computer Vision, LNCS 9914. Cham: Springer, 2016:777-823. |
| 22 | KRISTAN M, LEONARDIS A, MATAS J, et al. The sixth visual object tracking VOT2018 challenge results [C]// Proceedings of the 2018 European Conference on Computer Vision, LNCS 11129. Cham: Springer, 2019: 3-53. |
| 23 | DANELLJAN M, BHAT G, KHAN F S, et al. ATOM: accurate tracking by overlap maximization[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019:4660-4669. 10.1109/cvpr.2019.00479 |
| 24 | DAI K, WANG D, LU H, et al. Visual tracking via adaptive spatially-regularized correlation filters[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019:4670-4679. 10.1109/cvpr.2019.00480 |
| 25 | ZHU Z, WANG Q, LI B, et al. Distractor-aware Siamese networks for visual object tracking [C]// Proceedings of the 2018 International Conference on European Conference on Computer Vision. Berlin, Heidelberg: Springer, 2018: 101-117. 10.1007/978-3-030-01240-3_7 |
| 26 | LI B, WU W, WANG Q, et al. SiamRPN++: evolution of siamese visual tracking with very deep networks [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020:4282-4291. 10.1109/cvpr.2019.00441 |
| 27 | XU T, FENG Z H, WU X J, et al. Learning adaptive discriminative correlation filters via temporal consistency preserving spatial feature selection for robust visual object tracking[J]. IEEE Transactions on Image Processing, 2019, 28(11):5596-5609. 10.1109/tip.2019.2919201 |
| 28 | WANG G T, LUO C, XIONG Z W. Spmtracker: series-parallel matching for real-time visual object tracking [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 3643-3652. 10.1109/cvpr.2019.00376 |
| 29 | BHAT G, JOHNANDER J, DANELLJAN M, et al. Unveiling the power of deep tracking [C]// Proceedings of the 2018 European Conference on Computer Vision. Berlin, Heidelberg: Springer-Verlag, 2018:483-498. 10.1007/978-3-030-01216-8_30 |
| 30 | BAI S, HE Z, XU T-B, et al. Multi-hierarchical independent correlation filters for visual tracking[EB/OL]. (2018-11-26) [2022-03-11]. . 10.1109/icme46284.2020.9102759 |
| 31 | XU T, FENG Z H, WU X J, et al. Joint group feature selection and discriminative filter learning for robust visual object tracking[C]// Proceedings of the 2019 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2019: 7950-796. 10.1109/iccv.2019.00804 |
| [1] | 姜文涛, 李宛宣, 张晟翀. 非线性时间一致性的相关滤波目标跟踪[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2558-2570. |
| [2] | 熊武, 曹从军, 宋雪芳, 邵云龙, 王旭升. 基于多尺度混合域注意力机制的笔迹鉴别方法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2225-2232. |
| [3] | 孙逊, 冯睿锋, 陈彦如. 基于深度与实例分割融合的单目3D目标检测方法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2208-2215. |
| [4] | 刘源泂, 何茂征, 黄益斌, 钱程. 基于ResNet50和改进注意力机制的船舶识别模型[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1935-1941. |
| [5] | 孙子文, 钱立志, 杨传栋, 高一博, 陆庆阳, 袁广林. 基于Transformer的视觉目标跟踪方法综述[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1644-1654. |
| [6] | 廖存燚, 郑毅, 刘玮瑾, 于欢, 刘守印. 自动驾驶环境感知多任务去耦-融合算法[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 424-431. |
| [7] | 荆智文, 张屿佳, 孙伯廷, 郭浩. 二阶段孪生图卷积神经网络推荐算法[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 469-476. |
| [8] | 崔晨辉, 蔺素珍, 李大威, 禄晓飞, 武杰. 基于孪生网络和Transformer的红外弱小目标跟踪方法[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 563-571. |
| [9] | 曾蠡, 杨婧如, 黄罡, 景翔, 罗超然. 超图应用方法综述:问题、进展与挑战[J]. 《计算机应用》唯一官方网站, 2024, 44(11): 3315-3326. |
| [10] | 黄睿, 张超群, 成旭毅, 邢艳, 张宝. 不完整实例引导的航空发动机叶片实例分割[J]. 《计算机应用》唯一官方网站, 2024, 44(1): 167-174. |
| [11] | 路琨婷, 费蓉蓉, 张选德. 融合卷积神经网络的遥感图像全色锐化[J]. 《计算机应用》唯一官方网站, 2023, 43(9): 2963-2969. |
| [12] | 杨君宇, 董岩, 龙镇南, 杨新, 韩斌. 基于事件相机的雨滴检测算法[J]. 《计算机应用》唯一官方网站, 2023, 43(9): 2904-2909. |
| [13] | 姜钧舰, 刘达维, 刘逸凡, 任酉贵, 赵志滨. 基于孪生网络的小样本目标检测算法[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2325-2329. |
| [14] | 唐鑫, 彭博, 滕飞. 基于状态信息的红外小目标跟踪方法[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1938-1942. |
| [15] | 王利, 宣士斌, 秦续阳, 李紫薇. 基于双解码器的Transformer多目标跟踪方法[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1919-1929. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||