


《计算机应用》唯一官方网站 ›› 2023, Vol. 43 ›› Issue (11): 3587-3593.DOI: 10.11772/j.issn.1001-9081.2022101593
罗芳1( ), 刘阳1, 何道森2
), 刘阳1, 何道森2
收稿日期:2022-10-25
修回日期:2023-01-10
接受日期:2023-01-16
发布日期:2023-04-12
出版日期:2023-11-10
通讯作者:
罗芳
作者简介:罗芳(1977—),女,湖北天门人,副教授,博士,CCF会员,主要研究方向:数据挖掘、智能信息处理 luof@whut.edu.cn基金资助:
Fang LUO1(), Yang LIU1, G. T. S HO2
Received:2022-10-25
Revised:2023-01-10
Accepted:2023-01-16
Online:2023-04-12
Published:2023-11-10
Contact:
Fang LUO
About author:LUO Fang, born in 1977, Ph. D., associate professor. Her research interests include data mining, intelligent information processing.Supported by:摘要:
受台风、大雾、雨雪等复杂天气以及遮挡、尺度变化等影响,现有船舶检测方法存在误检和漏检问题。针对上述复杂场景问题,在YOLOX-S模型的基础上,提出一种自适应特征融合的多尺度船舶检测方法。首先,在主干特征提取网络中引入特征增强模块,抑制复杂背景噪声对船舶特征提取的干扰;其次,考虑深浅层次特征融合比例问题,设计自适应特征融合模块,充分利用深浅层次特征,提高模型的多尺度船舶检测能力;最后,在检测头网络,将检测头解耦,并引入自适应的多任务损失函数,平衡分类任务和回归任务,提高船舶检测的鲁棒性。实验结果显示,所提方法在公开船舶检测数据集SeaShips和McShips上的检测平均精度均值(mAP)分别达到了97.43%和96.10%,检测速度达到每秒189帧,满足实时检测的要求,验证了所提方法在复杂场景下仍能对多尺度船舶目标实现高精度检测。
中图分类号:
罗芳, 刘阳, 何道森. 复杂场景下自适应特征融合的多尺度船舶检测[J]. 计算机应用, 2023, 43(11): 3587-3593.
Fang LUO, Yang LIU, G. T. S HO. Multi-scale ship detection based on adaptive feature fusion in complex scenes[J]. Journal of Computer Applications, 2023, 43(11): 3587-3593.

图1 自适应特征融合的多尺度船舶检测网络结构
Fig. 1 Structure of multi-scale ship detection model based on adaptive feature fusion
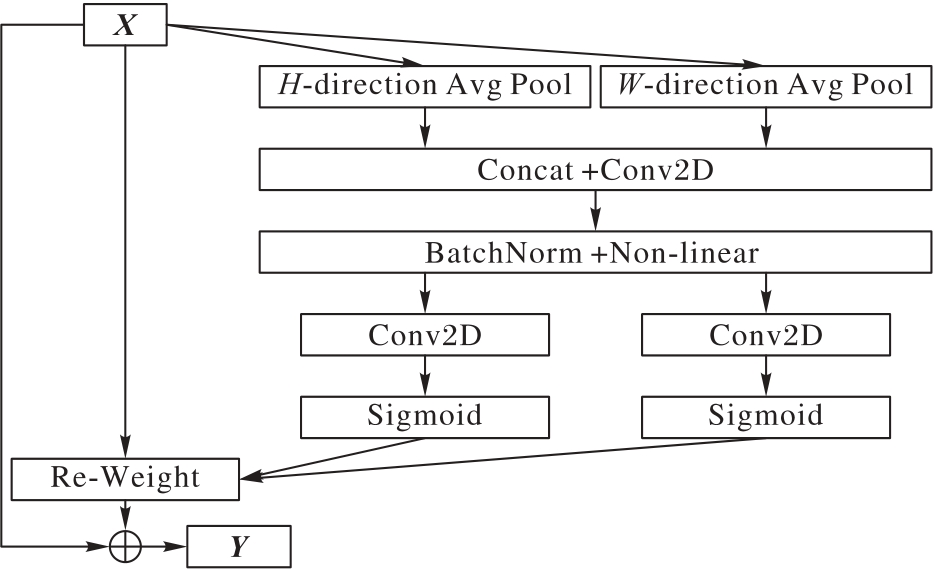
图2 改进的基于CA的特征增强模块
Fig. 2 Improved feature augmentation module based on CA
| 类型 | 输入 | 输出 |
|---|---|---|
| Focus | 640×640×3 | 320×320×12 |
| Conv2D_BN_SiLU | 320×320×12 | 320×320×32 |
| Conv2D_BN_SiLU | 320×320×32 | 160×160×64 |
| CSPLayer | 160×160×64 | 160×160×64 |
| Conv2D_BN_SiLU | 160×160×64 | 80×80×128 |
| CSPLayer | 80×80×128 | 80×80×128 |
| 特征增强模块 | 80×80×128 | 80×80×128 |
| Conv2D_BN_SiLU | 80×80×256 | 40×40×256 |
| CSPLayer | 40×40×256 | 40×40×256 |
| 特征增强模块 | 40×40×256 | 40×40×256 |
| Conv2D_BN_SiLU | 40×40×256 | 20×20×512 |
| SPPBottleNeck | 20×20×512 | 20×20×512 |
| CSPLayer | 20×20×512 | 20×20×512 |
| 特征增强模块 | 20×20×512 | 20×20×512 |
表1 改进的主干特征提取网络结构
Tab. 1 Structure of improved backbone feature extraction network
| 类型 | 输入 | 输出 |
|---|---|---|
| Focus | 640×640×3 | 320×320×12 |
| Conv2D_BN_SiLU | 320×320×12 | 320×320×32 |
| Conv2D_BN_SiLU | 320×320×32 | 160×160×64 |
| CSPLayer | 160×160×64 | 160×160×64 |
| Conv2D_BN_SiLU | 160×160×64 | 80×80×128 |
| CSPLayer | 80×80×128 | 80×80×128 |
| 特征增强模块 | 80×80×128 | 80×80×128 |
| Conv2D_BN_SiLU | 80×80×256 | 40×40×256 |
| CSPLayer | 40×40×256 | 40×40×256 |
| 特征增强模块 | 40×40×256 | 40×40×256 |
| Conv2D_BN_SiLU | 40×40×256 | 20×20×512 |
| SPPBottleNeck | 20×20×512 | 20×20×512 |
| CSPLayer | 20×20×512 | 20×20×512 |
| 特征增强模块 | 20×20×512 | 20×20×512 |

图3 自适应特征融合网络的结构
Fig. 3 Structure of adaptive feature fusion network

图4 自适应特征融合前后的检测热力图对比
Fig. 4 Comparison of detection heatmaps before and after adaptive feature fusion

图5 不同场景下不同模型的船舶检测结果
Fig. 5 Detection results of ships by different models in different scenes
| 配置/参数 | 属性/取值 | 配置/参数 | 属性/取值 |
|---|---|---|---|
| GPU | RTX 3080Ti | 初始学习率 | 0.01 |
| CPU | Intel i7-12700K | 最小学习率 | 0.000 1 |
| 梯度下降方法 | 随机梯度下降 | 训练代数 | 100 |
| 初始动量 | 0.937 | 图片输入尺寸 | 640×640 |
| 学习率下降方式 | Cos |
表2 模型训练配置
Tab. 2 Model training configuration
| 配置/参数 | 属性/取值 | 配置/参数 | 属性/取值 |
|---|---|---|---|
| GPU | RTX 3080Ti | 初始学习率 | 0.01 |
| CPU | Intel i7-12700K | 最小学习率 | 0.000 1 |
| 梯度下降方法 | 随机梯度下降 | 训练代数 | 100 |
| 初始动量 | 0.937 | 图片输入尺寸 | 640×640 |
| 学习率下降方式 | Cos |
| SeaShipst | McShips | ||
|---|---|---|---|
| 船舶类别 | 数量 | 船舶类别 | 数量 |
| 矿砂船 | 2 199 | 民用船 | 5 945 |
| 散装货船 | 1 505 | 军用船 | 5 382 |
| 集装箱船 | 1 952 | ||
| 杂货船 | 901 | ||
| 渔船 | 2 190 | ||
| 客船 | 474 | ||
表3 SeaShipst和McShips数据集的船舶种类及数量
Tab. 3 Types and numbers of SeaShips and McShips datasets
| SeaShipst | McShips | ||
|---|---|---|---|
| 船舶类别 | 数量 | 船舶类别 | 数量 |
| 矿砂船 | 2 199 | 民用船 | 5 945 |
| 散装货船 | 1 505 | 军用船 | 5 382 |
| 集装箱船 | 1 952 | ||
| 杂货船 | 901 | ||
| 渔船 | 2 190 | ||
| 客船 | 474 | ||
| 模型 | AP | 精确率 | 召回率 | mAP | |||||
|---|---|---|---|---|---|---|---|---|---|
| 散装货船 | 集装箱船 | 渔船 | 杂货船 | 矿砂船 | 客船 | ||||
| Faster-RCNN | 95.92 | 98.77 | 93.28 | 97.20 | 98.28 | 91.51 | 69.21 | 97.18 | 91.04 |
| SSD | 96.59 | 98.77 | 90.82 | 97.16 | 94.92 | 94.97 | 96.63 | 85.13 | 90.87 |
| YOLOv3 | 94.76 | 97.92 | 93.47 | 97.11 | 95.65 | 89.63 | 94.81 | 87.64 | 83.67 |
| YOLOv7 | 93.62 | 97.47 | 93.60 | 94.14 | 94.17 | 91.39 | 95.60 | 83.93 | 93.83 |
| YOLOX | 99.28 | 98.96 | 97.17 | 99.22 | 99.34 | 96.55 | 97.40 | 95.85 | 96.81 |
| 本文模型 | 99.52 | 98.96 | 97.89 | 99.55 | 99.55 | 98.84 | 97.37 | 96.54 | 97.43 |
表4 SeaShips数据集上不同模型的对比 ( %)
Tab. 4 Comparison of different models on SeaShips dataset
| 模型 | AP | 精确率 | 召回率 | mAP | |||||
|---|---|---|---|---|---|---|---|---|---|
| 散装货船 | 集装箱船 | 渔船 | 杂货船 | 矿砂船 | 客船 | ||||
| Faster-RCNN | 95.92 | 98.77 | 93.28 | 97.20 | 98.28 | 91.51 | 69.21 | 97.18 | 91.04 |
| SSD | 96.59 | 98.77 | 90.82 | 97.16 | 94.92 | 94.97 | 96.63 | 85.13 | 90.87 |
| YOLOv3 | 94.76 | 97.92 | 93.47 | 97.11 | 95.65 | 89.63 | 94.81 | 87.64 | 83.67 |
| YOLOv7 | 93.62 | 97.47 | 93.60 | 94.14 | 94.17 | 91.39 | 95.60 | 83.93 | 93.83 |
| YOLOX | 99.28 | 98.96 | 97.17 | 99.22 | 99.34 | 96.55 | 97.40 | 95.85 | 96.81 |
| 本文模型 | 99.52 | 98.96 | 97.89 | 99.55 | 99.55 | 98.84 | 97.37 | 96.54 | 97.43 |
| 模型 | AP | 精确率 | 召回率 | mAP | |
|---|---|---|---|---|---|
| 民用船 | 军用船 | ||||
| Faster-RCNN | 87.75 | 86.92 | 48.57 | 93.68 | 87.33 |
| SSD | 86.51 | 94.10 | 91.79 | 83.30 | 90.31 |
| YOLOv3 | 90.04 | 92.59 | 92.21 | 82.92 | 91.31 |
| YOLOv7 | 91.54 | 94.98 | 93.28 | 73.01 | 93.26 |
| YOLOX | 93.61 | 97.71 | 93.24 | 91.25 | 95.66 |
| 本文模型 | 94.62 | 97.58 | 93.22 | 91.68 | 96.10 |
表5 McShips数据集上不同模型的性能对比 ( %)
Tab. 5 Performance comparison of different models on McShips dataset
| 模型 | AP | 精确率 | 召回率 | mAP | |
|---|---|---|---|---|---|
| 民用船 | 军用船 | ||||
| Faster-RCNN | 87.75 | 86.92 | 48.57 | 93.68 | 87.33 |
| SSD | 86.51 | 94.10 | 91.79 | 83.30 | 90.31 |
| YOLOv3 | 90.04 | 92.59 | 92.21 | 82.92 | 91.31 |
| YOLOv7 | 91.54 | 94.98 | 93.28 | 73.01 | 93.26 |
| YOLOX | 93.61 | 97.71 | 93.24 | 91.25 | 95.66 |
| 本文模型 | 94.62 | 97.58 | 93.22 | 91.68 | 96.10 |
| 改进方法 | 特征增强 | 自适应特征融合 | 多任务损失函数 | AP | mAP | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| 散装货船 | 集装箱船 | 渔船 | 杂货船 | 矿砂船 | 客船 | |||||
| a | 97.02 | 98.61 | 95.81 | 97.25 | 97.42 | 94.75 | 96.81 | |||
| b | √ | 97.30 | 99.27 | 95.61 | 98.06 | 97.78 | 94.66 | 97.12 | ||
| c | √ | 98.19 | 99.69 | 95.75 | 97.53 | 96.82 | 95.44 | 97.24 | ||
| d | √ | 97.92 | 99.26 | 95.81 | 97.86 | 97.43 | 94.17 | 97.07 | ||
| 本文方法 | √ | √ | √ | 97.68 | 99.29 | 96.14 | 98.24 | 97.42 | 95.79 | 97.43 |
表6 SeaShips数据集上的消融实验结果 ( %)
Tab. 6 Ablation experiment results on SeaShips dataset
| 改进方法 | 特征增强 | 自适应特征融合 | 多任务损失函数 | AP | mAP | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| 散装货船 | 集装箱船 | 渔船 | 杂货船 | 矿砂船 | 客船 | |||||
| a | 97.02 | 98.61 | 95.81 | 97.25 | 97.42 | 94.75 | 96.81 | |||
| b | √ | 97.30 | 99.27 | 95.61 | 98.06 | 97.78 | 94.66 | 97.12 | ||
| c | √ | 98.19 | 99.69 | 95.75 | 97.53 | 96.82 | 95.44 | 97.24 | ||
| d | √ | 97.92 | 99.26 | 95.81 | 97.86 | 97.43 | 94.17 | 97.07 | ||
| 本文方法 | √ | √ | √ | 97.68 | 99.29 | 96.14 | 98.24 | 97.42 | 95.79 | 97.43 |
改进 方法 | 特征 增强 | 自适应 特征融合 | 多任务 损失函数 | AP | mAP | |
|---|---|---|---|---|---|---|
| 民用船 | 军用船 | |||||
| a | 93.61 | 97.71 | 95.66 | |||
| b | √ | 93.66 | 97.67 | 95.67 | ||
| c | √ | 94.04 | 97.33 | 95.69 | ||
| d | √ | 93.98 | 97.69 | 95.83 | ||
| 本文方法 | √ | √ | √ | 94.62 | 97.58 | 96.10 |
表7 McShips数据集上的消融实验结果 ( %)
Tab. 7 Ablation experiment results on McShips dataset
改进 方法 | 特征 增强 | 自适应 特征融合 | 多任务 损失函数 | AP | mAP | |
|---|---|---|---|---|---|---|
| 民用船 | 军用船 | |||||
| a | 93.61 | 97.71 | 95.66 | |||
| b | √ | 93.66 | 97.67 | 95.67 | ||
| c | √ | 94.04 | 97.33 | 95.69 | ||
| d | √ | 93.98 | 97.69 | 95.83 | ||
| 本文方法 | √ | √ | √ | 94.62 | 97.58 | 96.10 |
| 1 | 王培玉,李峰,周书仁,等. 复杂码头环境下的船舶检测与跟踪算法[J].计算机工程与科学, 2017, 39(5):992-998. 10.3969/j.issn.1007-130X.2017.05.026 |
| WANG P Y, LI F, ZHOU S R, et al. A ship detection and tracking algorithm under complex wharf environment[J]. Computer Engineering and Science, 2017, 39(5): 992-998. 10.3969/j.issn.1007-130X.2017.05.026 | |
| 2 | REN L, RAN X, PENG J, et al. Saliency detection for small maritime target using singular value decomposition of amplitude spectrum[J]. IETE Technical Review, 2017, 34(6): 631-641. 10.1080/02564602.2016.1231023 |
| 3 | 黄致君,桑庆兵. 改进R-FCN的船舶识别方法[J]. 计算机科学与探索, 2020, 14(6):1045-1053. 10.3778/j.issn.1673-9418.1904061 |
| HUANG Z J, SANG Q B. Ship detection based on improved R-FCN[J]. Journal of Frontiers of Computer Science and Technology, 2020, 14(6):1045-1053. 10.3778/j.issn.1673-9418.1904061 | |
| 4 | 李佳东,张丹普,范亚琼,等. 基于改进YOLOv5的轻量级船舶目标检测算法[J]. 计算机应用, 2023, 43(3):923-929. 10.11772/j.issn.1001-9081.2022071096 |
| LI J D, ZHANG D P, FAN Y Q, et al. Lightweight ship target detection algorithm based on improved YOLOv5[J]. Journal of Computer Applications, 2023, 43(3):923-929. 10.11772/j.issn.1001-9081.2022071096 | |
| 5 | 姚婷婷,张波,柳晓鸣. 特征增强全卷积网络下的船舶检测[J]. 计算机辅助设计与图形学学报, 2022, 34(7):1028-1036. 10.3724/sp.j.1089.2022.19105 |
| YAO T T, ZHANG B, LIU X M. Feature enhanced fully convolutional network for ship detection[J]. Journal of Computer-Aided Design and Computer Graphics, 2022, 34(7): 1028-1036. 10.3724/sp.j.1089.2022.19105 | |
| 6 | 王文亮,李延祥,张一帆,等. MPANet-YOLOv5:多路径聚合网络复杂海域目标检测[J]. 湖南大学学报(自然科学版), 2022, 49(10):69-76. 10.16339/j.cnki.hdxbzkb.2022360 |
| WANG W L, LI Y X, ZHANG Y F, et al. MPANet-YOLOv5: multi-path aggregation network for complex sea object detection[J]. Journal of Hunan University (Natural Sciences), 2022, 49(10):69-76. 10.16339/j.cnki.hdxbzkb.2022360 | |
| 7 | HUANG G, WAN Z, LIU X, et al. Ship detection based on squeeze excitation skip-connection path networks for optical remote sensing images[J]. Neurocomputing, 2019, 332: 215-223. 10.1016/j.neucom.2018.12.050 |
| 8 | 李辉. 面向航运船舶的检测与跟踪方法研究[D]. 武汉:武汉科技大学, 2019: 1-62. |
| LI H. Research on detection and tracking methods for shipping vessel[D]. Wuhan: Wuhan University of Science and Technology, 2019: 1-62. | |
| 9 | 聂鑫,刘文,吴巍.复杂场景下基于增强YOLOv3的船舶目标检测[J].计算机应用,2020,40(9):2561-2570. 10.11772/j.issn.1001-9081.2020010097 |
| NIE X, LIU W, WU W. Ship detection based on enhanced YOLOv3 under complex environments[J]. Journal of Computer Applications, 2020, 40(9): 2561-2570. 10.11772/j.issn.1001-9081.2020010097 | |
| 10 | GE Z, LIU S, WANG F, et al. YOLOX: exceeding YOLO series in 2021[EB/OL]. [2022-07-18].. |
| 11 | YUN S, HAN D, CHUN S, et al. CutMix: regularization strategy to train strong classifiers with localizable features[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 6022-6031. 10.1109/iccv.2019.00612 |
| 12 | LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 936-944. 10.1109/cvpr.2017.106 |
| 13 | HOU Q, ZHOU D, FENG J. Coordinate attention for efficient mobile network design[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 13708-13717. 10.1109/cvpr46437.2021.01350 |
| 14 | CIPOLLA R, GAI Y, KENDALL A. Multi-task learning using uncertainty to weigh losses for scene geometry and semantics[C]// Proceedings of the 2017 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 7482-7491. 10.1109/cvpr.2018.00781 |
| 15 | SHAO Z, WU W, WANG Z, et al. SeaShips: a large-scale precisely annotated dataset for ship detection[J]. IEEE Transactions on Multimedia, 2018, 20(10): 2593-2604. 10.1109/tmm.2018.2865686 |
| 16 | ZHENG Y, ZHANG S. McShips: a large-scale ship dataset for detection and fine-grained categorization in the wild[C]// Proceedings of the 2020 IEEE International Conference on Multimedia and Expo. Piscataway: IEEE, 2020: 1-6. 10.1109/icme46284.2020.9102907 |
| 17 | REN S, HE K, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. 10.1109/tpami.2016.2577031 |
| 18 | LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot multiBox detector[C]// Proceedings of the 2016 European Conference on Computer Vision, LNCS 9905. Cham: Springer, 2016: 21-37. |
| 19 | REDMON J, FARHADI A. YOLOv3: an incremental improvement[EB/OL]. (2018-04-08) [2022-04-08].. 10.1109/cvpr.2017.690 |
| 20 | WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 7464-7475. 10.1109/cvpr52729.2023.00721 |
| [1] | 李威, 陈玲, 徐修远, 朱敏, 郭际香, 周凯, 牛颢, 张煜宸, 易珊烨, 章毅, 罗凤鸣. 基于多任务学习的间质性肺病分割算法[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1285-1293. |
| [2] | 王杰, 孟华. 基于点云整体拓扑结构的图像分类算法[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1107-1113. |
| [3] | 李新叶, 侯晔凝, 孔英会, 燕志旗. 结合特征融合与增强注意力的少样本目标检测[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 745-751. |
| [4] | 陈佳, 张鸿. 基于特征增强和语义相关性匹配的图像文本检索方法[J]. 《计算机应用》唯一官方网站, 2024, 44(1): 16-23. |
| [5] | 袁国龙, 张玉金, 刘洋. 基于残差反馈和自注意力的图像篡改取证网络[J]. 《计算机应用》唯一官方网站, 2023, 43(9): 2925-2931. |
| [6] | 李豆豆, 李汪根, 夏义春, 束阳, 高坤. 基于特征交互与自适应融合的骨骼动作识别[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2581-2587. |
| [7] | 郭奕裕, 周箩鱼, 刘新瑜, 李尧. 改进注意力机制的电梯场景下危险品检测方法[J]. 《计算机应用》唯一官方网站, 2023, 43(7): 2295-2302. |
| [8] | 鲁斌, 柳杰林. 基于特征增强的三维点云语义分割[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1818-1825. |
| [9] | 谭湘粤, 胡晓, 杨佳信, 向俊将. 基于递进式特征增强聚合的伪装目标检测[J]. 《计算机应用》唯一官方网站, 2022, 42(7): 2192-2200. |
| [10] | 温静, 李强. 基于时空上下文信息增强的目标跟踪算法[J]. 《计算机应用》唯一官方网站, 2021, 41(12): 3565-3570. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||