


《计算机应用》唯一官方网站 ›› 2025, Vol. 45 ›› Issue (10): 3294-3301.DOI: 10.11772/j.issn.1001-9081.2024101437
• 多媒体计算与计算机仿真 • 上一篇
李维刚1,2, 曹文杰1( ), 李金灵1
), 李金灵1
收稿日期:2024-10-12
修回日期:2024-11-28
接受日期:2024-12-02
发布日期:2024-12-05
出版日期:2025-10-10
通讯作者:
曹文杰
作者简介:李维刚(1977—),男,湖北咸宁人,教授,博士,主要研究方向:工业过程控制、人工智能、机器学习基金资助:
Weigang LI1,2, Wenjie CAO1(), Jinling LI1
Received:2024-10-12
Revised:2024-11-28
Accepted:2024-12-02
Online:2024-12-05
Published:2025-10-10
Contact:
Wenjie CAO
About author:LI Weigang, born in 1977, Ph. D., professor. His research interests include industrial process control, artificial intelligence, machine learning.Supported by:摘要:
点云补全指利用不完整的点云数据重建高质量的完整点云。然而,现有的大多数点云补全网络在捕捉局部特征和重建细节方面存在不足,导致生成的点云在局部细节和补全精度上表现不佳。为解决上述问题,提出一种基于自适应邻域特征融合的多阶段点云补全网络(ANFF-Net)。首先,特征提取器通过自适应调整关键点的邻域选择适应不同形状的点云,有效捕捉不同语义点之间的空间关系,减少局部细节信息的丢失;其次,特征拓展器利用局部感知Transformer进一步扩展邻近点的局部特征信息,提升网络的细节恢复能力;最后,点云生成器采用交叉注意力机制选择性传递不完整点云的局部特征信息,并使用折叠模块逐步细化点云的局部区域,显著增强补全后点云的细节保留,生成更一致的几何细节。实验结果表明,ANFF-Net在ShapeNet55数据集上的平均补全精度相较于ProxyFormer提升了9.68%,并在PCN和KITTI数据集上取得了较好的补全效果。可视化结果显示,ANFF-Net生成的点云具有更高的细粒度,形状更接近真实值。
中图分类号:
李维刚, 曹文杰, 李金灵. 基于自适应邻域特征融合的多阶段点云补全网络[J]. 计算机应用, 2025, 45(10): 3294-3301.
Weigang LI, Wenjie CAO, Jinling LI. Multi-stage point cloud completion network based on adaptive neighborhood feature fusion[J]. Journal of Computer Applications, 2025, 45(10): 3294-3301.
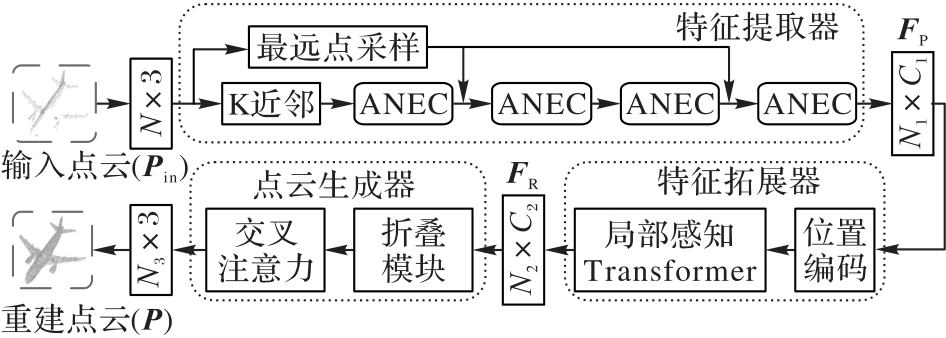
图1 ANFF-Net的总体框架
Fig. 1 Overall framework of ANFF-Net

图2 自适应邻域边缘卷积处理目标点邻域
Fig. 2 Target point neighborhood processed by adaptive neighborhood edge convolution
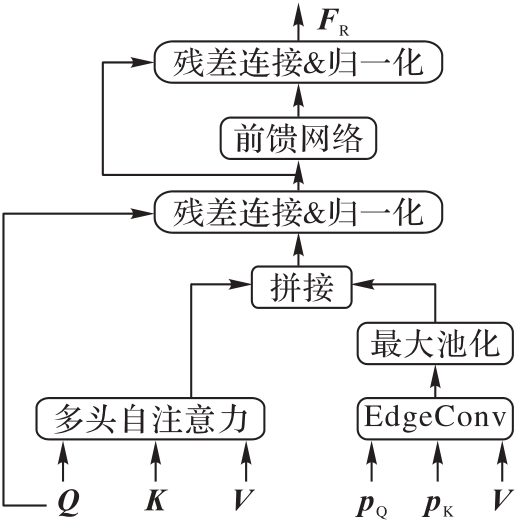
图3 局部感知Transformer
Fig. 3 Local perception Transformer

图4 点云生成器的结构
Fig. 4 Structure of point cloud generator
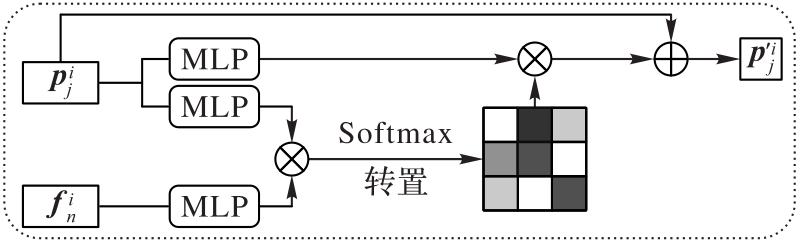
图5 交叉注意力的结构
Fig. 5 Structure of cross-attention
| 网络 | 类别 | 平均值 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 飞机 | 橱柜 | 汽车 | 椅子 | 台灯 | 沙发 | 桌子 | 船 | ||
| FoldingNet[ | 8.37 | 13.74 | 11.23 | 14.41 | 14.83 | 14.57 | 12.52 | 11.75 | 12.68 |
| TopNet[ | 7.61 | 13.31 | 10.90 | 13.82 | 14.44 | 14.78 | 11.22 | 11.12 | 12.15 |
| PCN[ | 6.86 | 12.94 | 10.25 | 13.17 | 13.42 | 14.06 | 11.07 | 10.49 | 11.53 |
| GRNet[ | 6.45 | 10.37 | 9.45 | 9.41 | 7.96 | 10.51 | 8.44 | 8.04 | 8.83 |
| PMP-Net[ | 5.65 | 11.24 | 9.64 | 9.51 | 6.95 | 10.83 | 8.72 | 7.25 | 8.73 |
| CRN[ | 4.79 | 9.97 | 8.41 | 9.49 | 8.94 | 10.69 | 7.81 | 8.05 | 8.51 |
| PoinTr[ | 4.75 | 10.47 | 8.68 | 9.39 | 7.75 | 10.93 | 7.78 | 7.29 | 8.38 |
| PMP-Net++[ | 4.39 | 9.96 | 8.53 | 8.09 | 6.06 | 9.82 | 7.17 | 6.52 | 7.56 |
| SnowflakeNet[ | 4.29 | 9.16 | 8.08 | 7.89 | 6.07 | 9.23 | 6.55 | 6.40 | 7.21 |
| GSFormer[ | 4.02 | 9.12 | 7.93 | 7.50 | 5.74 | 8.83 | 6.32 | 6.18 | 6.96 |
| PointAttN[ | 3.87 | 9.01 | 7.63 | 7.43 | 5.90 | 8.68 | 6.32 | 6.09 | 6.86 |
| ProxyFormer[ | 4.01 | 9.01 | 7.88 | 7.11 | 5.35 | 8.77 | 6.03 | 5.98 | 6.77 |
| ANFF-Net | 3.65 | 9.04 | 7.46 | 6.85 | 5.32 | 8.23 | 6.02 | 5.76 | 6.53 |
表1 不同网络在PCN数据集8种类别上的CD-L1指标对比
Tab. 1 Comparison of CD-L1 metrics of different networks on eight categories in PCN dataset
| 网络 | 类别 | 平均值 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 飞机 | 橱柜 | 汽车 | 椅子 | 台灯 | 沙发 | 桌子 | 船 | ||
| FoldingNet[ | 8.37 | 13.74 | 11.23 | 14.41 | 14.83 | 14.57 | 12.52 | 11.75 | 12.68 |
| TopNet[ | 7.61 | 13.31 | 10.90 | 13.82 | 14.44 | 14.78 | 11.22 | 11.12 | 12.15 |
| PCN[ | 6.86 | 12.94 | 10.25 | 13.17 | 13.42 | 14.06 | 11.07 | 10.49 | 11.53 |
| GRNet[ | 6.45 | 10.37 | 9.45 | 9.41 | 7.96 | 10.51 | 8.44 | 8.04 | 8.83 |
| PMP-Net[ | 5.65 | 11.24 | 9.64 | 9.51 | 6.95 | 10.83 | 8.72 | 7.25 | 8.73 |
| CRN[ | 4.79 | 9.97 | 8.41 | 9.49 | 8.94 | 10.69 | 7.81 | 8.05 | 8.51 |
| PoinTr[ | 4.75 | 10.47 | 8.68 | 9.39 | 7.75 | 10.93 | 7.78 | 7.29 | 8.38 |
| PMP-Net++[ | 4.39 | 9.96 | 8.53 | 8.09 | 6.06 | 9.82 | 7.17 | 6.52 | 7.56 |
| SnowflakeNet[ | 4.29 | 9.16 | 8.08 | 7.89 | 6.07 | 9.23 | 6.55 | 6.40 | 7.21 |
| GSFormer[ | 4.02 | 9.12 | 7.93 | 7.50 | 5.74 | 8.83 | 6.32 | 6.18 | 6.96 |
| PointAttN[ | 3.87 | 9.01 | 7.63 | 7.43 | 5.90 | 8.68 | 6.32 | 6.09 | 6.86 |
| ProxyFormer[ | 4.01 | 9.01 | 7.88 | 7.11 | 5.35 | 8.77 | 6.03 | 5.98 | 6.77 |
| ANFF-Net | 3.65 | 9.04 | 7.46 | 6.85 | 5.32 | 8.23 | 6.02 | 5.76 | 6.53 |
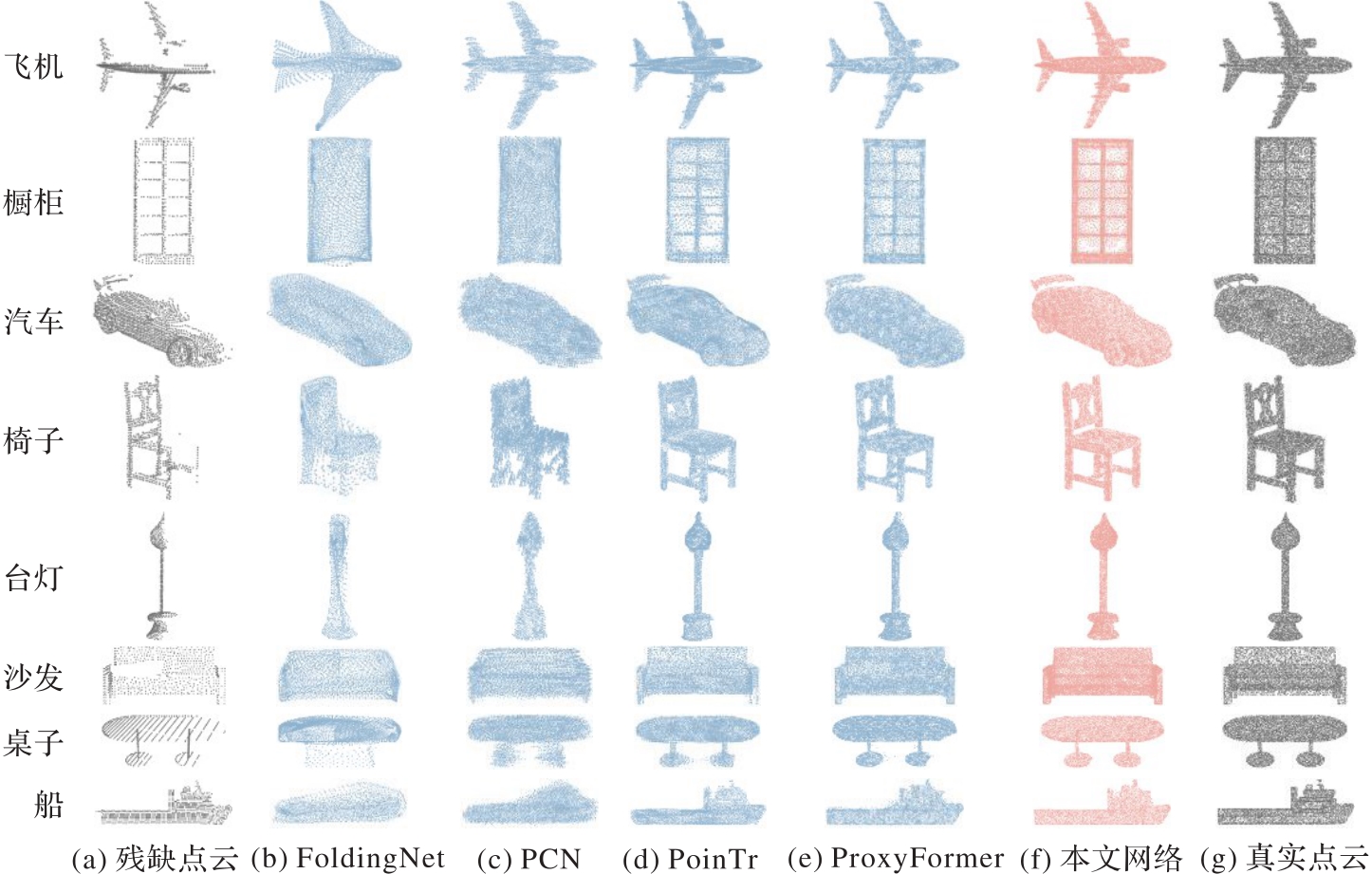
图6 不同网络在PCN数据集上的补全结果可视化
Fig. 6 Visualization of completion results of different networks on PCN dataset
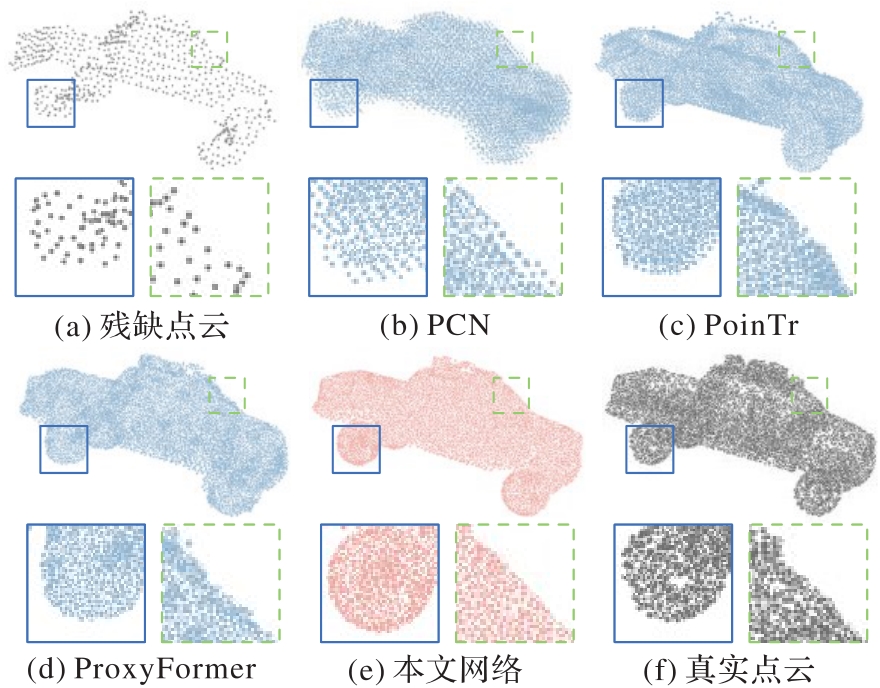
图7 不同网络对汽车类别的补全结果可视化
Fig. 7 Visualization of completion results of different networks for car category
| 网络 | 类别 | 难度 | 平均值 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 桌子 | 椅子 | 飞机 | 汽车 | 沙发 | 简单 | 中等 | 困难 | ||
| PF-Net[ | 3.95 | 4.24 | 1.81 | 2.53 | 3.34 | 3.83 | 3.87 | 7.97 | 5.22 |
| TopNet[ | 2.21 | 2.53 | 1.14 | 2.18 | 2.36 | 2.26 | 2.16 | 4.3 | 2.91 |
| PCN[ | 2.13 | 2.29 | 1.02 | 1.85 | 2.06 | 1.94 | 1.96 | 4.08 | 2.66 |
| GRNet[ | 1.63 | 1.88 | 1.01 | 1.64 | 1.72 | 1.35 | 1.71 | 2.85 | 1.97 |
| SnowflakeNet[ | 0.98 | 1.12 | 0.54 | 0.98 | 1.02 | 0.70 | 1.06 | 1.96 | 1.24 |
| PoinTr[ | 0.81 | 0.95 | 0.44 | 0.91 | 0.79 | 0.58 | 0.88 | 1.79 | 1.09 |
| ProxyFormer[ | 0.70 | 0.83 | 0.34 | 0.78 | 0.69 | 0.49 | 0.75 | 1.55 | 0.93 |
| ANFF-Net | 0.65 | 0.71 | 0.33 | 0.75 | 0.66 | 0.49 | 0.70 | 1.33 | 0.84 |
表2 不同网络在ShapeNet-55数据集5种常见类别和3种难度上的CD-L2指标对比
Tab. 2 Comparison of CD-L2 metrics of different networks on five common categories and three difficulty levels in ShapeNet-55 dataset
| 网络 | 类别 | 难度 | 平均值 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 桌子 | 椅子 | 飞机 | 汽车 | 沙发 | 简单 | 中等 | 困难 | ||
| PF-Net[ | 3.95 | 4.24 | 1.81 | 2.53 | 3.34 | 3.83 | 3.87 | 7.97 | 5.22 |
| TopNet[ | 2.21 | 2.53 | 1.14 | 2.18 | 2.36 | 2.26 | 2.16 | 4.3 | 2.91 |
| PCN[ | 2.13 | 2.29 | 1.02 | 1.85 | 2.06 | 1.94 | 1.96 | 4.08 | 2.66 |
| GRNet[ | 1.63 | 1.88 | 1.01 | 1.64 | 1.72 | 1.35 | 1.71 | 2.85 | 1.97 |
| SnowflakeNet[ | 0.98 | 1.12 | 0.54 | 0.98 | 1.02 | 0.70 | 1.06 | 1.96 | 1.24 |
| PoinTr[ | 0.81 | 0.95 | 0.44 | 0.91 | 0.79 | 0.58 | 0.88 | 1.79 | 1.09 |
| ProxyFormer[ | 0.70 | 0.83 | 0.34 | 0.78 | 0.69 | 0.49 | 0.75 | 1.55 | 0.93 |
| ANFF-Net | 0.65 | 0.71 | 0.33 | 0.75 | 0.66 | 0.49 | 0.70 | 1.33 | 0.84 |
| 网络 | Fidelity | MMD |
|---|---|---|
| PCN[ | 2.235 | 1.366 |
| TopNet[ | 5.354 | 0.636 |
| GRNet[ | 0.816 | 0.568 |
| CRN[ | 1.023 | 0.872 |
| PointAttN[ | 0.672 | 0.504 |
| PoinTr[ | 0.000 | 0.526 |
| ProxyFormer[ | 0.000 | 0.508 |
| ANFF-Net | 0.000 | 0.504 |
表3 不同网络在KITTI数据集上的保真度与MMD指标对比
Tab. 3 Comparison of Fidelity and MMD metrics of different networks on KITTI dataset
| 网络 | Fidelity | MMD |
|---|---|---|
| PCN[ | 2.235 | 1.366 |
| TopNet[ | 5.354 | 0.636 |
| GRNet[ | 0.816 | 0.568 |
| CRN[ | 1.023 | 0.872 |
| PointAttN[ | 0.672 | 0.504 |
| PoinTr[ | 0.000 | 0.526 |
| ProxyFormer[ | 0.000 | 0.508 |
| ANFF-Net | 0.000 | 0.504 |
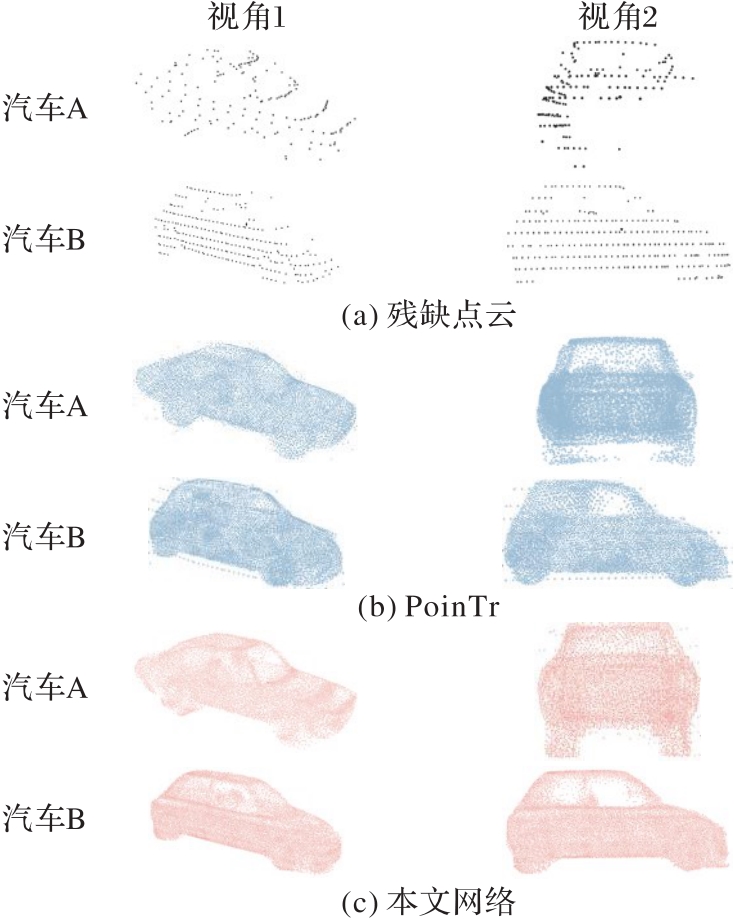
图8 不同网络在KITTI数据集上的补全结果可视化
Fig. 8 Visualization of completion results of different networks on KITTI dataset
| 分组 | 消融设置 | CD-L1 |
|---|---|---|
| A | 将ANEC替换为PointNet | 7.16 |
| B | 将ANEC替换为DGCNN | 6.88 |
| C | w/o Cross-attention | 6.80 |
| D | w/o EdgeConv | 6.72 |
| E | 将折叠模块替换为SPD模块 | 6.64 |
| F | 完整ANFF-Net | 6.53 |
表4 消融实验结果
Tab. 4 Ablation experimental results
| 分组 | 消融设置 | CD-L1 |
|---|---|---|
| A | 将ANEC替换为PointNet | 7.16 |
| B | 将ANEC替换为DGCNN | 6.88 |
| C | w/o Cross-attention | 6.80 |
| D | w/o EdgeConv | 6.72 |
| E | 将折叠模块替换为SPD模块 | 6.64 |
| F | 完整ANFF-Net | 6.53 |
| 网络 | Params/106 | 浮点运算次数/GFLOPs | CD-L1 |
|---|---|---|---|
| FoldingNet[ | 2.41 | 27.65 | 12.68 |
| PCN[ | 6.84 | 14.69 | 11.53 |
| GRNet[ | 76.71 | 25.88 | 8.83 |
| PoinTr[ | 30.90 | 10.41 | 8.38 |
| ANFF-Net | 32.49 | 15.09 | 6.53 |
表5 不同网络在PCN数据集上的复杂性分析
Tab. 5 Complexity analysis of different networks on PCN dataset
| 网络 | Params/106 | 浮点运算次数/GFLOPs | CD-L1 |
|---|---|---|---|
| FoldingNet[ | 2.41 | 27.65 | 12.68 |
| PCN[ | 6.84 | 14.69 | 11.53 |
| GRNet[ | 76.71 | 25.88 | 8.83 |
| PoinTr[ | 30.90 | 10.41 | 8.38 |
| ANFF-Net | 32.49 | 15.09 | 6.53 |
| [1] | 陈建文,赵丽丽,任蓝草,等. 深度学习点云质量增强方法综述[J]. 中国图象图形学报, 2023, 28(11): 3295-3319. |
| CHEN J W, ZHAO L L, REN L C, et al. Deep learning-based quality enhancement for 3D point clouds: a survey[J]. Journal of Image and Graphics, 2023, 28(11): 3295-3319. | |
| [2] | 李朝,兰海,魏宪. 基于注意力的毫米波‒激光雷达融合目标检测[J]. 计算机应用, 2021, 41(7): 2137-2144. |
| LI C, LAN H, WEI X. Attention-based object detection with millimeter wave radar-lidar fusion[J]. Journal of Computer Applications, 2021, 41(7): 2137-2144. | |
| [3] | 任柯燕,谷美颖,袁正谦,等. 自动驾驶3D目标检测研究综述[J]. 控制与决策, 2023, 38(4): 865-889. |
| REN K Y, GU M Y, YUAN Z Q, et al. 3D object detection algorithms in autonomous driving: a review[J]. Control and Decision, 2023, 38(4): 865-889. | |
| [4] | 张磊,徐孝彬,曹晨飞,等. 基于动态特征剔除的图像与点云融合的机器人位姿估计方法[J]. 中国激光, 2022, 49(6): No.0610001. |
| ZHANG L, XU X B, CAO C F, et al. Robot pose estimation method based on image and point cloud fusion with dynamic feature elimination[J]. Chinese Journal of Lasers, 2022, 49(6): No.0610001. | |
| [5] | 周静,胡怡宇,胡成玉,等. 基于点云补全和多分辨Transformer的弱感知目标检测方法[J]. 计算机应用, 2023, 43(7): 2155-2165. |
| ZHOU J, HU Y Y, HU C Y, et al. Weakly perceived object detection method based on point cloud completion and multi-resolution Transformer[J]. Journal of Computer Applications, 2023, 43(7): 2155-2165. | |
| [6] | GRAHAM B, ENGELCKE M, VAN DER MAATEN L. 3D semantic segmentation with submanifold sparse convolutional networks[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 9224-9232. |
| [7] | XIE H, YAO H, ZHOU S, et al. GRNet: gridding residual network for dense point cloud completion[C]// Proceedings of the 2020 European Conference on Computer Vision, LNCS 12354. Cham: Springer, 2020: 365-381. |
| [8] | QI C R, SU H, MO K, et al. PointNet: deep learning on point sets for 3D classification and segmentation[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 77-85. |
| [9] | YUAN W, KHOT T, HELD D, et al. PCN: point completion network[C]// Proceedings of the 2018 International Conference on 3D Vision. Piscataway: IEEE, 2018: 728-737. |
| [10] | YANG Y, FENG C, SHEN Y, et al. FoldingNet: point cloud auto-encoder via deep grid deformation[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 206-215. |
| [11] | WANG X, ANG M H, LEE G H. Cascaded refinement network for point cloud completion[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 787-796. |
| [12] | TCHAPMI L P, KOSARAJU V, REZATOFIGHI H, et al. TopNet: structural point cloud decoder[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 383-392. |
| [13] | HUANG Z, YU Y, XU J, et al. PF-Net: point fractal network for 3D point cloud completion[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 7659-7667. |
| [14] | WEN X, XIANG P, HAN Z, et al. PMP-Net++: point cloud completion by Transformer-enhanced multi-step point moving paths[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(1): 852-867. |
| [15] | XIANG P, WEN X, LIU Y S, et al. SnowflakeNet: point cloud completion by snowflake point deconvolution with skip-transformer[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 5479-5489. |
| [16] | ZHAO H, JIANG L, JIA J, et al. Point Transformer[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 16239-16248. |
| [17] | YU X, RAO Y, WANG Z, et al. PoinTr: diverse point cloud completion with geometry-aware Transformers[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 12478-12487. |
| [18] | WANG Y, SUN Y, LIU Z, et al. Dynamic graph CNN for learning on point clouds[J]. ACM Transactions on Graphics, 2019, 38(5): No.146. |
| [19] | WANG J, CUI Y, GUO D, et al. PointAttN: you only need attention for point cloud completion[C]// Proceedings of the 38th AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2024: 5472-5480. |
| [20] | LONG Y, CHEN Z, LU H, et al. GSFormer: geometric-spatial Transformer on point cloud completion[C]// Proceedings of the 2023 IEEE International Conference on Multimedia and Expo. Piscataway: IEEE, 2023: 1175-1180. |
| [21] | LI S, GAO P, TAN X, et al. ProxyFormer: proxy alignment assisted point cloud completion with missing part sensitive Transformer[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 9466-9475. |
| [22] | ZHOU H, FENG Y, FANG M, et al. Adaptive graph convolution for point cloud analysis[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 4945-4954. |
| [23] | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 6000-6010. |
| [24] | WU Z, SONG S, KHOSLA A, et al. 3D ShapeNets: a deep representation for volumetric shapes[C]// Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2015: 1912-1920. |
| [25] | LOSHCHILOV I, HUTTER F. Fixing weight decay regularization in Adam[EB/OL]. [2024-11-24].. |
| [26] | WEN X, XIANG P, HAN Z, et al. PMP-Net: point cloud completion by learning multi-step point moving paths[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 7439-7448. |
| [1] | 梁一鸣, 范菁, 柴汶泽. 基于双向交叉注意力的多尺度特征融合情感分类[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2773-2782. |
| [2] | 王艺涵, 路翀, 陈忠源. 跨模态文本信息增强的多模态情感分析模型[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2237-2244. |
| [3] | 丁宇伟, 石洪波, 李杰, 梁敏. 基于局部和全局特征解耦的图像去噪网络[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2571-2579. |
| [4] | 陈丽安, 过弋. 融合个体偏差信息的文本情感分析模型[J]. 《计算机应用》唯一官方网站, 2024, 44(1): 145-151. |
| [5] | 周静, 胡怡宇, 胡成玉, 王天江. 基于点云补全和多分辨Transformer的弱感知目标检测方法[J]. 《计算机应用》唯一官方网站, 2023, 43(7): 2155-2165. |
| [6] | 郑智雄, 刘建华, 孙水华, 徐戈, 林鸿辉. 融合多窗口局部信息的方面级情感分析模型[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1796-1802. |
| [7] | 郭玉彬, 文向, 刘攀, 李西明. 基于双流结构的跨模态行人重识别关系网络[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1803-1810. |
| [8] | 廉飞宇, 张良, 王杰栋, 靳于康, 柴玉. 基于图模型与注意力机制的室外场景点云分割模型[J]. 《计算机应用》唯一官方网站, 2023, 43(12): 3911-3917. |
| [9] | 仇天昊, 陈淑荣. 基于EfficientNet的双分路多尺度联合学习行人再识别[J]. 《计算机应用》唯一官方网站, 2022, 42(7): 2065-2071. |
| [10] | 李杏峰, 黄玉清, 任珍文, 李毅红. 基于自适应邻域的鲁棒多视图聚类算法[J]. 计算机应用, 2021, 41(4): 1093-1099. |
| [11] | 李华峰, 黄樟灿, 张蔷, 湛航, 谈庆. 求解需求可拆分车辆路径问题的改进的金字塔演化策略[J]. 计算机应用, 2021, 41(1): 300-306. |
| [12] | 石志良, 蔡旺月, 汪国强, 熊林杰. 基于自适应邻域的固有形状特征算法[J]. 计算机应用, 2020, 40(4): 1151-1156. |
| [13] | 武婷, 曹春萍. 融合位置权重的基于注意力交叉注意力的长短期记忆方面情感分析模型[J]. 计算机应用, 2019, 39(8): 2198-2203. |
| [14] | 叶双, 杨晓敏, 严斌宇. 基于自适应锚定邻域回归的图像超分辨率算法[J]. 计算机应用, 2019, 39(10): 3040-3045. |
| [15] | 邹承明, 罗莹, 徐晓龙. 基于多特征组合的细粒度图像分类方法[J]. 计算机应用, 2018, 38(7): 1853-1856. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||