


《计算机应用》唯一官方网站 ›› 2025, Vol. 45 ›› Issue (11): 3573-3582.DOI: 10.11772/j.issn.1001-9081.2024111625
• 人工智能 • 上一篇
徐梦楠1, 叶海良1, 曹飞龙2( )
)
收稿日期:2024-11-18
修回日期:2025-03-25
接受日期:2025-04-16
发布日期:2025-04-22
出版日期:2025-11-10
通讯作者:
曹飞龙
作者简介:徐梦楠(1997—),女,浙江杭州人,硕士,主要研究方向:深度学习、图神经网络、点云配准基金资助:
Mengnan XU1, Hailiang YE1, Feilong CAO2()
Received:2024-11-18
Revised:2025-03-25
Accepted:2025-04-16
Online:2025-04-22
Published:2025-11-10
Contact:
Feilong CAO
About author:XU Mengnan, born in 1997, M. S. Her research interests include deep learning, graph neural network, point cloud registration.Supported by:摘要:
现有的大部分点云配准方法通常忽略了邻域内相邻节点之间的关系,导致对局部几何结构特征提取不足。针对该问题,提出一种面向鲁棒点云配准的邻域关注和拓扑感知的图卷积(NATA)方法,以捕捉更深层次的语义特征和更丰富的几何信息。首先,设计了级联几何感知模块,该模块利用基于自注意力的局部邻域更新图卷积模块,关注局部图的内在几何结构,以获得更精确的局部拓扑信息;其次,级联结构组合不同维度的局部拓扑信息,以产生更具判别性的局部描述符;最后,提出特征交互图更新模块,该模块在点云中建立了一种注意力机制来捕捉点云的隐含关系并感知点云的形状特征。在具有挑战性的3D点云基准测试上的实验结果表明,所提方法在部分噪声点云配准中的平均绝对误差(MAE)在未知形状和未知类别下分别取得了0.157 2和0.154 4的优异结果。
中图分类号:
徐梦楠, 叶海良, 曹飞龙. 面向鲁棒点云配准的邻域关注和拓扑感知的图卷积方法[J]. 计算机应用, 2025, 45(11): 3573-3582.
Mengnan XU, Hailiang YE, Feilong CAO. Neighborhood-attention and topology-aware graph convolution method for robust point cloud registration[J]. Journal of Computer Applications, 2025, 45(11): 3573-3582.
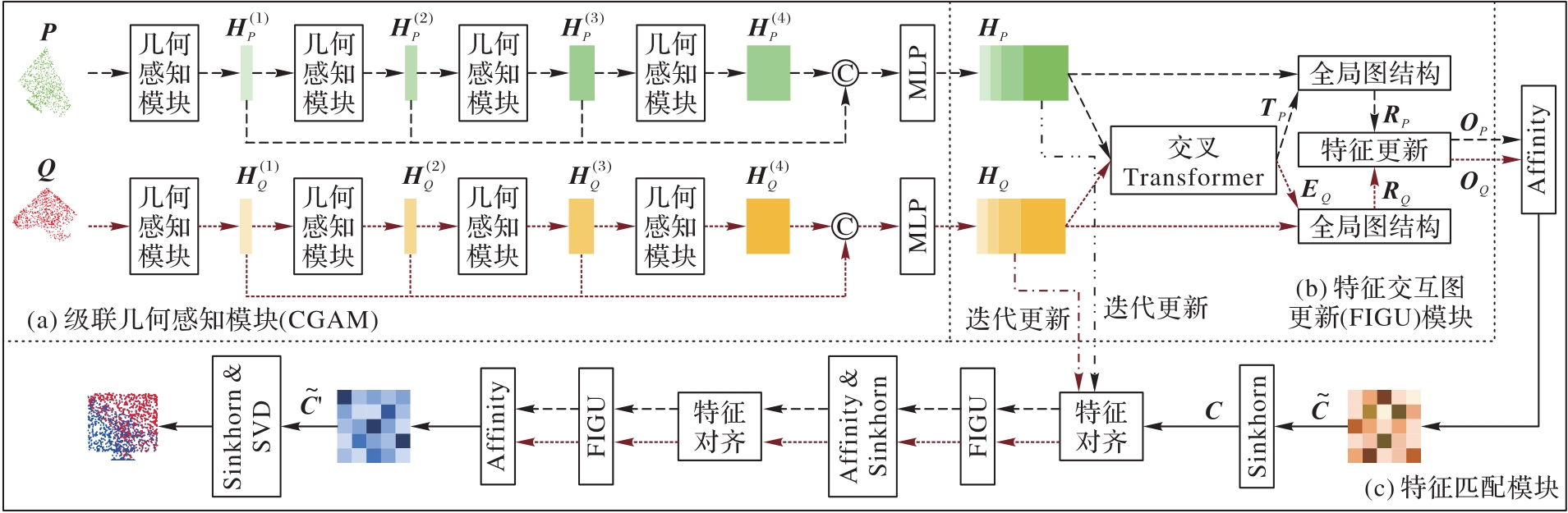
图1 NATA模型框架
Fig.1 NATA model framework
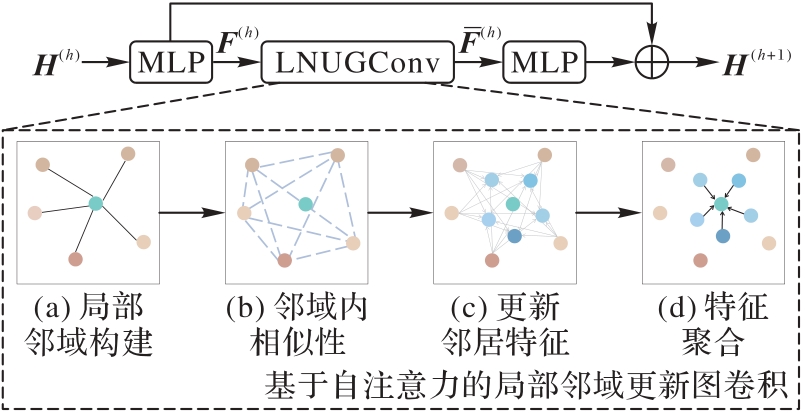
图2 几何感知模块
Fig.2 Geometry-aware module
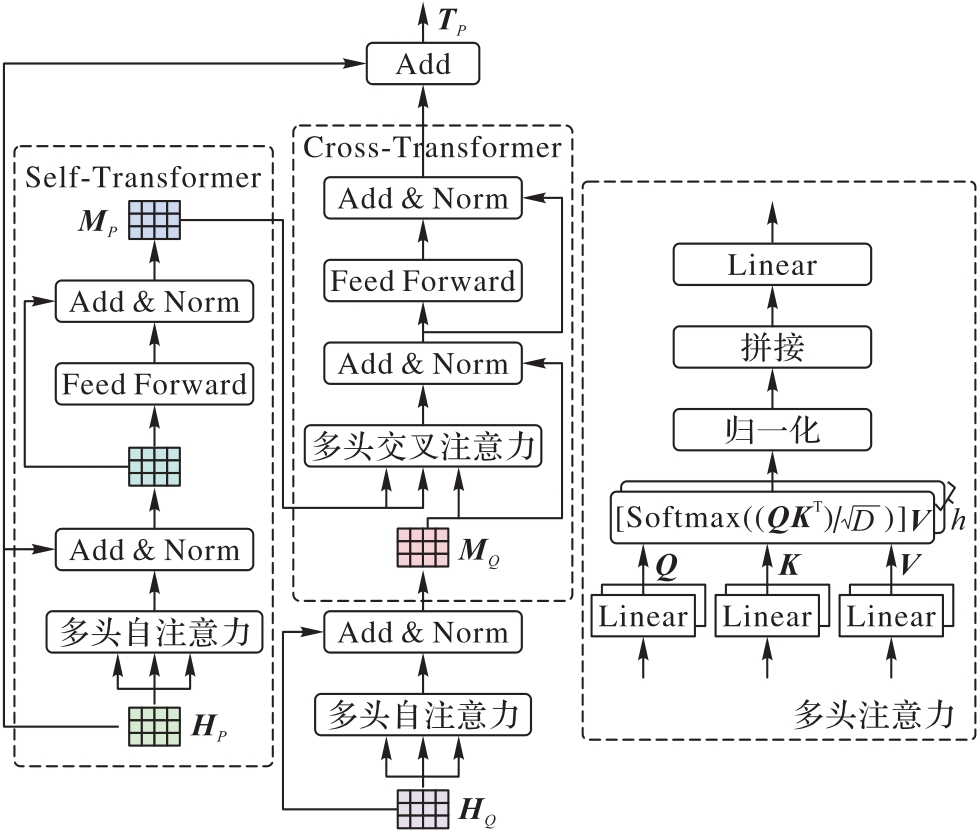
图3 Transformer模块的流程
Fig.3 Flow of Transformer module
| 网络层 | 设置 | 输入维度 | 输出维度 |
|---|---|---|---|
| 输入层 | 3D点坐标 | — | |
| CGAM | GAM-1{ | ||
| GAM-2{ | |||
| GAM-3{ | |||
| GAM-4{ | |||
| 整合层 | |||
| FIGU | Transformer模块 | ||
| 全局图结构 | |||
| 特征更新 | |||
| 特征对齐 | |||
估计 变换 | SVD |
表1 NATA的实现细节
Tab. 1 Implementation details of NATA
| 网络层 | 设置 | 输入维度 | 输出维度 |
|---|---|---|---|
| 输入层 | 3D点坐标 | — | |
| CGAM | GAM-1{ | ||
| GAM-2{ | |||
| GAM-3{ | |||
| GAM-4{ | |||
| 整合层 | |||
| FIGU | Transformer模块 | ||
| 全局图结构 | |||
| 特征更新 | |||
| 特征对齐 | |||
估计 变换 | SVD |
| 方法 | 未知形状 | 未知类别 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MAE | MIE | RMSE | MAE | MIE | RMSE | |||||||
| R | t | R | t | R | t | R | t | R | t | R | t | |
| DCP-v2[ | 2.391 3 | 0.005 9 | 4.645 4 | 0.011 7 | 3.720 4 | 0.008 4 | 3.000 8 | 0.012 2 | 5.903 5 | 0.024 2 | 4.820 9 | 0.017 1 |
| IDAM+GNN[ | 1.878 8 | 0.011 3 | 3.690 7 | 0.022 7 | 4.249 7 | 0.019 5 | 1.807 8 | 0.011 2 | 3.502 3 | 0.022 4 | 3.462 6 | 0.018 7 |
| RPMNet[ | 0.305 1 | 0.002 8 | 0.583 6 | 0.005 8 | 0.843 0 | 0.006 4 | 0.306 3 | 0.002 7 | 0.583 7 | 0.005 5 | 0.834 3 | 0.004 5 |
| DeepBBS[ | 0.291 1 | 0.572 3 | 0.001 1 | 2.137 5 | 0.514 0 | 0.000 7 | 1.054 5 | 0.001 5 | 3.265 1 | 0.004 4 | ||
| PREDATOR[ | 0.880 4 | 0.007 6 | 1.729 3 | 0.015 7 | 2.152 8 | 0.014 8 | 0.798 2 | 0.007 2 | 1.505 6 | 0.014 7 | 1.569 4 | 0.012 8 |
| REGTR[ | 0.458 0 | 0.003 5 | 0.913 0 | 0.007 5 | 1.547 5 | 0.010 5 | 0.633 6 | 0.004 4 | 1.259 3 | 0.009 4 | 2.620 7 | 0.014 7 |
| FINet[ | 2.616 1 | 0.028 8 | 4.992 6 | 0.058 2 | 3.929 8 | 0.038 5 | 0.993 1 | 0.009 5 | 2.034 3 | 0.020 0 | 2.818 2 | 0.020 4 |
| RGM[ | 0.077 2 | 0.000 7 | 0.143 7 | 0.341 1 | 0.001 9 | 0.079 6 | 0.000 7 | 0.145 4 | 0.001 4 | 0.305 7 | 0.002 6 | |
| GeoTransformer[ | 0.375 1 | 0.004 3 | 0.739 2 | 0.008 4 | 0.437 1 | 0.004 2 | 0.320 4 | 0.003 1 | 0.632 4 | 0.007 2 | 0.376 1 | 0.004 3 |
| LFGNet[ | 0.084 8 | 0.000 7 | 0.157 2 | 0.361 1 | 0.002 7 | 0.073 4 | 0.135 9 | 0.001 3 | 0.290 8 | 0.001 7 | ||
| GMCNet[ | 0.087 5 | 0.000 8 | 0.166 0 | 0.001 6 | 0.001 3 | 0.088 8 | 0.003 1 | 0.164 4 | 0.001 6 | |||
| IFNet[ | 0.171 3 | 0.000 7 | 0.376 4 | 1.905 5 | 0.005 9 | 0.195 2 | 0.001 0 | 0.420 0 | 0.002 0 | 1.714 9 | 0.007 6 | |
| SharpGConv[ | 0.318 5 | 0.002 5 | 0.244 0 | 0.001 6 | ||||||||
| NATA | 0.061 9 | 0.000 5 | 0.113 9 | 0.001 1 | 0.096 1 | 0.000 8 | 0.056 1 | 0.000 5 | 0.100 8 | 0.001 1 | 0.077 5 | 0.000 7 |
表2 未知形状与未知类别的完整到完整的噪声点云配准性能
Tab. 2 Registration performance of complete-to-complete noisy point clouds with unknown shapes and unknown categories
| 方法 | 未知形状 | 未知类别 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MAE | MIE | RMSE | MAE | MIE | RMSE | |||||||
| R | t | R | t | R | t | R | t | R | t | R | t | |
| DCP-v2[ | 2.391 3 | 0.005 9 | 4.645 4 | 0.011 7 | 3.720 4 | 0.008 4 | 3.000 8 | 0.012 2 | 5.903 5 | 0.024 2 | 4.820 9 | 0.017 1 |
| IDAM+GNN[ | 1.878 8 | 0.011 3 | 3.690 7 | 0.022 7 | 4.249 7 | 0.019 5 | 1.807 8 | 0.011 2 | 3.502 3 | 0.022 4 | 3.462 6 | 0.018 7 |
| RPMNet[ | 0.305 1 | 0.002 8 | 0.583 6 | 0.005 8 | 0.843 0 | 0.006 4 | 0.306 3 | 0.002 7 | 0.583 7 | 0.005 5 | 0.834 3 | 0.004 5 |
| DeepBBS[ | 0.291 1 | 0.572 3 | 0.001 1 | 2.137 5 | 0.514 0 | 0.000 7 | 1.054 5 | 0.001 5 | 3.265 1 | 0.004 4 | ||
| PREDATOR[ | 0.880 4 | 0.007 6 | 1.729 3 | 0.015 7 | 2.152 8 | 0.014 8 | 0.798 2 | 0.007 2 | 1.505 6 | 0.014 7 | 1.569 4 | 0.012 8 |
| REGTR[ | 0.458 0 | 0.003 5 | 0.913 0 | 0.007 5 | 1.547 5 | 0.010 5 | 0.633 6 | 0.004 4 | 1.259 3 | 0.009 4 | 2.620 7 | 0.014 7 |
| FINet[ | 2.616 1 | 0.028 8 | 4.992 6 | 0.058 2 | 3.929 8 | 0.038 5 | 0.993 1 | 0.009 5 | 2.034 3 | 0.020 0 | 2.818 2 | 0.020 4 |
| RGM[ | 0.077 2 | 0.000 7 | 0.143 7 | 0.341 1 | 0.001 9 | 0.079 6 | 0.000 7 | 0.145 4 | 0.001 4 | 0.305 7 | 0.002 6 | |
| GeoTransformer[ | 0.375 1 | 0.004 3 | 0.739 2 | 0.008 4 | 0.437 1 | 0.004 2 | 0.320 4 | 0.003 1 | 0.632 4 | 0.007 2 | 0.376 1 | 0.004 3 |
| LFGNet[ | 0.084 8 | 0.000 7 | 0.157 2 | 0.361 1 | 0.002 7 | 0.073 4 | 0.135 9 | 0.001 3 | 0.290 8 | 0.001 7 | ||
| GMCNet[ | 0.087 5 | 0.000 8 | 0.166 0 | 0.001 6 | 0.001 3 | 0.088 8 | 0.003 1 | 0.164 4 | 0.001 6 | |||
| IFNet[ | 0.171 3 | 0.000 7 | 0.376 4 | 1.905 5 | 0.005 9 | 0.195 2 | 0.001 0 | 0.420 0 | 0.002 0 | 1.714 9 | 0.007 6 | |
| SharpGConv[ | 0.318 5 | 0.002 5 | 0.244 0 | 0.001 6 | ||||||||
| NATA | 0.061 9 | 0.000 5 | 0.113 9 | 0.001 1 | 0.096 1 | 0.000 8 | 0.056 1 | 0.000 5 | 0.100 8 | 0.001 1 | 0.077 5 | 0.000 7 |
| 方法 | 未知形状 | 未知类别 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MAE | MIE | RMSE | MAE | MIE | RMSE | |||||||
| R | t | R | t | R | t | R | t | R | t | R | t | |
| DCP-v2[ | 5.012 9 | 0.060 8 | 9.653 2 | 0.121 2 | 6.861 4 | 0.078 7 | 6.376 3 | 0.066 7 | 12.525 7 | 0.122 0 | 8.627 8 | 0.085 2 |
| IDAM+GNN[ | 6.238 8 | 0.067 5 | 12.140 0 | 0.134 2 | 10.081 2 | 0.104 9 | 6.293 3 | 0.082 7 | 12.120 3 | 0.163 2 | 10.169 9 | 0.119 4 |
| RPMNet[ | 0.769 3 | 0.007 0 | 1.508 7 | 0.014 9 | 1.915 3 | 0.014 9 | 0.820 4 | 0.007 9 | 1.572 4 | 0.016 7 | 1.956 1 | 0.017 5 |
| DeepBBS[ | 1.556 3 | 0.016 4 | 3.140 9 | 0.032 7 | 5.111 0 | 0.044 7 | 2.285 8 | 0.024 8 | 4.513 3 | 0.049 3 | 7.984 4 | 0.061 7 |
| PREDATOR[ | 1.027 1 | 0.008 8 | 1.976 9 | 0.018 1 | 2.397 9 | 0.019 9 | 1.024 6 | 0.009 9 | 1.934 5 | 0.020 6 | 3.431 7 | 0.027 0 |
| REGTR[ | 0.809 4 | 0.006 3 | 1.601 3 | 0.013 3 | 2.132 1 | 0.015 4 | 0.931 0 | 0.008 1 | 1.795 9 | 0.017 1 | 2.292 2 | 0.020 6 |
| FINet[ | 2.800 4 | 0.027 8 | 5.424 9 | 0.058 5 | 4.645 0 | 0.046 8 | 3.733 3 | 0.040 6 | 7.206 8 | 0.085 3 | 5.740 0 | 0.063 2 |
| RGM[ | 0.539 5 | 0.004 2 | 1.056 4 | 0.009 0 | 3.928 2 | 0.020 7 | 0.915 5 | 0.007 1 | 1.683 1 | 0.014 7 | 4.086 4 | 0.030 1 |
| GeoTransformer[ | 0.781 1 | 0.008 4 | 1.541 0 | 0.018 3 | 0.725 2 | 0.008 1 | 1.435 0 | 0.018 1 | 0.010 3 | |||
| LFGNet[ | 0.370 6 | 0.003 3 | 0.695 1 | 0.006 9 | 1.251 7 | 0.011 9 | 0.700 2 | 0.006 3 | 1.327 7 | 0.012 3 | 2.352 1 | 0.022 9 |
| GMCNet[ | 1.609 3 | 0.013 2 | 3.003 2 | 0.027 1 | 5.034 9 | 0.034 5 | 1.784 3 | 0.014 7 | 3.390 0 | 0.030 3 | 5.613 9 | 0.042 8 |
| IFNet[ | 4.089 3 | 0.029 3 | 7.976 0 | 0.058 0 | 9.227 8 | 0.045 2 | 3.895 5 | 0.030 2 | 7.528 5 | 0.059 5 | 8.765 8 | 0.046 3 |
| SharpGConv[ | 2.884 6 | 0.015 6 | 1.351 9 | |||||||||
| NATA | 0.157 2 | 0.001 4 | 0.293 1 | 0.002 8 | 0.301 6 | 0.002 6 | 0.154 4 | 0.001 6 | 0.288 0 | 0.003 3 | 0.339 1 | 0.011 0 |
表3 未知形状和未知类别的部分到部分的噪声点云配准性能
Tab. 3 Registration performance of partial-to-partial noisy point clouds with unknown shapes and unknown categories
| 方法 | 未知形状 | 未知类别 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MAE | MIE | RMSE | MAE | MIE | RMSE | |||||||
| R | t | R | t | R | t | R | t | R | t | R | t | |
| DCP-v2[ | 5.012 9 | 0.060 8 | 9.653 2 | 0.121 2 | 6.861 4 | 0.078 7 | 6.376 3 | 0.066 7 | 12.525 7 | 0.122 0 | 8.627 8 | 0.085 2 |
| IDAM+GNN[ | 6.238 8 | 0.067 5 | 12.140 0 | 0.134 2 | 10.081 2 | 0.104 9 | 6.293 3 | 0.082 7 | 12.120 3 | 0.163 2 | 10.169 9 | 0.119 4 |
| RPMNet[ | 0.769 3 | 0.007 0 | 1.508 7 | 0.014 9 | 1.915 3 | 0.014 9 | 0.820 4 | 0.007 9 | 1.572 4 | 0.016 7 | 1.956 1 | 0.017 5 |
| DeepBBS[ | 1.556 3 | 0.016 4 | 3.140 9 | 0.032 7 | 5.111 0 | 0.044 7 | 2.285 8 | 0.024 8 | 4.513 3 | 0.049 3 | 7.984 4 | 0.061 7 |
| PREDATOR[ | 1.027 1 | 0.008 8 | 1.976 9 | 0.018 1 | 2.397 9 | 0.019 9 | 1.024 6 | 0.009 9 | 1.934 5 | 0.020 6 | 3.431 7 | 0.027 0 |
| REGTR[ | 0.809 4 | 0.006 3 | 1.601 3 | 0.013 3 | 2.132 1 | 0.015 4 | 0.931 0 | 0.008 1 | 1.795 9 | 0.017 1 | 2.292 2 | 0.020 6 |
| FINet[ | 2.800 4 | 0.027 8 | 5.424 9 | 0.058 5 | 4.645 0 | 0.046 8 | 3.733 3 | 0.040 6 | 7.206 8 | 0.085 3 | 5.740 0 | 0.063 2 |
| RGM[ | 0.539 5 | 0.004 2 | 1.056 4 | 0.009 0 | 3.928 2 | 0.020 7 | 0.915 5 | 0.007 1 | 1.683 1 | 0.014 7 | 4.086 4 | 0.030 1 |
| GeoTransformer[ | 0.781 1 | 0.008 4 | 1.541 0 | 0.018 3 | 0.725 2 | 0.008 1 | 1.435 0 | 0.018 1 | 0.010 3 | |||
| LFGNet[ | 0.370 6 | 0.003 3 | 0.695 1 | 0.006 9 | 1.251 7 | 0.011 9 | 0.700 2 | 0.006 3 | 1.327 7 | 0.012 3 | 2.352 1 | 0.022 9 |
| GMCNet[ | 1.609 3 | 0.013 2 | 3.003 2 | 0.027 1 | 5.034 9 | 0.034 5 | 1.784 3 | 0.014 7 | 3.390 0 | 0.030 3 | 5.613 9 | 0.042 8 |
| IFNet[ | 4.089 3 | 0.029 3 | 7.976 0 | 0.058 0 | 9.227 8 | 0.045 2 | 3.895 5 | 0.030 2 | 7.528 5 | 0.059 5 | 8.765 8 | 0.046 3 |
| SharpGConv[ | 2.884 6 | 0.015 6 | 1.351 9 | |||||||||
| NATA | 0.157 2 | 0.001 4 | 0.293 1 | 0.002 8 | 0.301 6 | 0.002 6 | 0.154 4 | 0.001 6 | 0.288 0 | 0.003 3 | 0.339 1 | 0.011 0 |

图4 在ModelNet40数据集上实现的配准可视化
Fig. 4 Registration visualization realized on ModelNet40 dataset
| K | MAE | MIE | RMSE | |||
|---|---|---|---|---|---|---|
| R | t | R | t | R | t | |
| 10 | 0.317 9 | 0.002 3 | 0.531 0 | 0.004 6 | 3.815 7 | 0.017 4 |
| 20 | 0.154 4 | 0.001 6 | 0.288 0 | 0.003 3 | 0.339 1 | 0.011 0 |
| 30 | 0.160 6 | 0.001 6 | 0.309 8 | 0.003 4 | 0.676 7 | 0.009 4 |
表4 最近邻数K的讨论
Tab. 4 Discussion of number of nearest neighbors K
| K | MAE | MIE | RMSE | |||
|---|---|---|---|---|---|---|
| R | t | R | t | R | t | |
| 10 | 0.317 9 | 0.002 3 | 0.531 0 | 0.004 6 | 3.815 7 | 0.017 4 |
| 20 | 0.154 4 | 0.001 6 | 0.288 0 | 0.003 3 | 0.339 1 | 0.011 0 |
| 30 | 0.160 6 | 0.001 6 | 0.309 8 | 0.003 4 | 0.676 7 | 0.009 4 |
| L | MAE | MIE | RMSE | |||
|---|---|---|---|---|---|---|
| R | t | R | t | R | t | |
| 1 | 0.670 3 | 0.006 4 | 1.268 3 | 0.013 6 | 2.034 6 | 0.022 4 |
| 2 | 0.167 2 | 0.001 8 | 0.313 8 | 0.003 6 | 0.518 3 | 0.010 1 |
| 3 | 0.154 4 | 0.001 6 | 0.288 0 | 0.003 3 | 0.339 1 | 0.011 0 |
| 4 | 0.156 3 | 0.001 6 | 0.290 7 | 0.003 2 | 0.613 0 | 0.009 0 |
表5 FIGU模块迭代次数L的讨论
Tab. 5 Discussion of number of FIGU module iterations L
| L | MAE | MIE | RMSE | |||
|---|---|---|---|---|---|---|
| R | t | R | t | R | t | |
| 1 | 0.670 3 | 0.006 4 | 1.268 3 | 0.013 6 | 2.034 6 | 0.022 4 |
| 2 | 0.167 2 | 0.001 8 | 0.313 8 | 0.003 6 | 0.518 3 | 0.010 1 |
| 3 | 0.154 4 | 0.001 6 | 0.288 0 | 0.003 3 | 0.339 1 | 0.011 0 |
| 4 | 0.156 3 | 0.001 6 | 0.290 7 | 0.003 2 | 0.613 0 | 0.009 0 |
| 方法 | 模块 | MAE | MIE | RMSE | |||||
|---|---|---|---|---|---|---|---|---|---|
| BL | CGAM | FIGU | R | t | R | t | R | t | |
| 1 | √ | 2.635 6 | 0.026 9 | 5.124 6 | 0.056 8 | 5.808 1 | 0.060 1 | ||
| 2 | √ | √ | 0.552 1 | 0.004 6 | 1.019 1 | 0.009 5 | 3.238 4 | 0.028 7 | |
| 3 | √ | √ | 0.574 0 | 0.004 8 | 1.079 5 | 0.009 9 | 2.147 2 | 0.016 2 | |
| 4 | √ | √ | √ | 0.154 4 | 0.001 6 | 0.288 0 | 0.003 3 | 0.339 1 | 0.011 0 |
表6 NATA在ModelNet40数据集上的消融实验结果
Tab. 6 Ablation experimental results of NATA on ModelNet40 dataset
| 方法 | 模块 | MAE | MIE | RMSE | |||||
|---|---|---|---|---|---|---|---|---|---|
| BL | CGAM | FIGU | R | t | R | t | R | t | |
| 1 | √ | 2.635 6 | 0.026 9 | 5.124 6 | 0.056 8 | 5.808 1 | 0.060 1 | ||
| 2 | √ | √ | 0.552 1 | 0.004 6 | 1.019 1 | 0.009 5 | 3.238 4 | 0.028 7 | |
| 3 | √ | √ | 0.574 0 | 0.004 8 | 1.079 5 | 0.009 9 | 2.147 2 | 0.016 2 | |
| 4 | √ | √ | √ | 0.154 4 | 0.001 6 | 0.288 0 | 0.003 3 | 0.339 1 | 0.011 0 |
| 数据集 | 方法 | MAE | MIE | RMSE | |||
|---|---|---|---|---|---|---|---|
| R | t | R | t | R | t | ||
| FAUST | DCP-v2[ | 9.206 5 | 0.085 5 | 18.682 5 | 0.168 7 | 12.339 6 | 0.108 4 |
| IDAM+GNN[ | 7.960 1 | 0.104 8 | 15.070 1 | 0.204 8 | 11.120 0 | 0.148 9 | |
| RPMNet[ | 3.877 2 | 0.025 5 | 7.575 7 | 0.049 9 | 5.812 6 | 0.036 7 | |
| DeepBBS[ | 5.226 7 | 0.046 1 | 9.794 6 | 0.091 6 | 13.630 2 | 0.089 5 | |
| PREDATOR[ | 1.939 1 | 0.017 3 | 3.624 3 | 0.036 2 | 3.860 4 | 0.049 3 | |
| REGTR[ | 0.714 3 | 0.005 8 | 1.367 3 | 0.011 7 | 0.982 6 | 0.007 9 | |
| FINet[ | 3.570 9 | 0.033 2 | 6.994 9 | 0.068 6 | 5.345 2 | 0.047 5 | |
| RGM[ | 1.135 6 | 0.008 5 | 2.184 9 | 0.016 7 | 3.174 6 | 0.023 3 | |
| GeoTransformer[ | 0.445 5 | 0.004 2 | 0.878 4 | 0.009 6 | 0.520 0 | 0.005 0 | |
| LFGNet[ | 1.411 4 | 0.010 2 | 2.682 0 | 0.020 9 | 5.801 9 | 0.045 6 | |
| GMCNet[ | 1.251 7 | 0.008 8 | 2.342 9 | 0.017 8 | 2.062 4 | 0.015 9 | |
| IFNet[ | 3.100 7 | 0.117 0 | 4.209 5 | 0.235 9 | 5.497 1 | 0.168 7 | |
| SharpGConv[ | 0.102 4 | 0.000 8 | 0.190 2 | 0.001 7 | 0.139 8 | 0.001 1 | |
| NATA | |||||||
| ShapeNet Parts | DCP-v2[ | 9.128 2 | 0.084 7 | 18.078 4 | 0.169 3 | 13.215 7 | 0.108 4 |
| IDAM+GNN[ | 7.698 5 | 0.081 3 | 14.701 6 | 0.162 6 | 12.521 8 | 0.117 6 | |
| RPMNet[ | 3.950 5 | 0.026 4 | 5.778 3 | 0.052 7 | 5.575 4 | 0.042 0 | |
| DeepBBS[ | 4.384 1 | 0.041 2 | 8.568 2 | 0.082 4 | 13.792 4 | 0.085 7 | |
| PREDATOR[ | 1.268 2 | 0.009 2 | 2.555 3 | 0.018 3 | 3.930 1 | 0.035 4 | |
| REGTR[ | 0.601 7 | 0.005 1 | 1.188 1 | 0.010 6 | 1.816 3 | 0.012 3 | |
| FINet[ | 3.501 4 | 0.033 0 | 6.854 5 | 0.068 0 | 5.233 4 | 0.047 4 | |
| RGM[ | 1.835 1 | 0.014 5 | 3.540 2 | 0.031 2 | 8.090 0 | 0.050 6 | |
| GeoTransformer[ | 0.566 2 | 0.005 4 | 1.095 5 | 0.011 3 | |||
| LFGNet[ | 1.211 9 | 0.009 9 | 2.312 1 | 0.021 3 | 4.423 2 | 0.036 3 | |
| GMCNet[ | 2.446 8 | 0.019 5 | 4.840 4 | 0.040 5 | 8.195 4 | 0.057 6 | |
| IFNet[ | 1.600 7 | 0.011 2 | 3.048 5 | 0.022 1 | 6.932 3 | 0.033 5 | |
| SharpGConv[ | 1.337 4 | 0.009 8 | |||||
| NATA | 0.170 3 | 0.001 5 | 0.319 6 | 0.003 1 | 0.351 1 | 0.005 0 | |
表7 在未知数据集上的通用性问题
Tab. 7 General issues on unknown datasets
| 数据集 | 方法 | MAE | MIE | RMSE | |||
|---|---|---|---|---|---|---|---|
| R | t | R | t | R | t | ||
| FAUST | DCP-v2[ | 9.206 5 | 0.085 5 | 18.682 5 | 0.168 7 | 12.339 6 | 0.108 4 |
| IDAM+GNN[ | 7.960 1 | 0.104 8 | 15.070 1 | 0.204 8 | 11.120 0 | 0.148 9 | |
| RPMNet[ | 3.877 2 | 0.025 5 | 7.575 7 | 0.049 9 | 5.812 6 | 0.036 7 | |
| DeepBBS[ | 5.226 7 | 0.046 1 | 9.794 6 | 0.091 6 | 13.630 2 | 0.089 5 | |
| PREDATOR[ | 1.939 1 | 0.017 3 | 3.624 3 | 0.036 2 | 3.860 4 | 0.049 3 | |
| REGTR[ | 0.714 3 | 0.005 8 | 1.367 3 | 0.011 7 | 0.982 6 | 0.007 9 | |
| FINet[ | 3.570 9 | 0.033 2 | 6.994 9 | 0.068 6 | 5.345 2 | 0.047 5 | |
| RGM[ | 1.135 6 | 0.008 5 | 2.184 9 | 0.016 7 | 3.174 6 | 0.023 3 | |
| GeoTransformer[ | 0.445 5 | 0.004 2 | 0.878 4 | 0.009 6 | 0.520 0 | 0.005 0 | |
| LFGNet[ | 1.411 4 | 0.010 2 | 2.682 0 | 0.020 9 | 5.801 9 | 0.045 6 | |
| GMCNet[ | 1.251 7 | 0.008 8 | 2.342 9 | 0.017 8 | 2.062 4 | 0.015 9 | |
| IFNet[ | 3.100 7 | 0.117 0 | 4.209 5 | 0.235 9 | 5.497 1 | 0.168 7 | |
| SharpGConv[ | 0.102 4 | 0.000 8 | 0.190 2 | 0.001 7 | 0.139 8 | 0.001 1 | |
| NATA | |||||||
| ShapeNet Parts | DCP-v2[ | 9.128 2 | 0.084 7 | 18.078 4 | 0.169 3 | 13.215 7 | 0.108 4 |
| IDAM+GNN[ | 7.698 5 | 0.081 3 | 14.701 6 | 0.162 6 | 12.521 8 | 0.117 6 | |
| RPMNet[ | 3.950 5 | 0.026 4 | 5.778 3 | 0.052 7 | 5.575 4 | 0.042 0 | |
| DeepBBS[ | 4.384 1 | 0.041 2 | 8.568 2 | 0.082 4 | 13.792 4 | 0.085 7 | |
| PREDATOR[ | 1.268 2 | 0.009 2 | 2.555 3 | 0.018 3 | 3.930 1 | 0.035 4 | |
| REGTR[ | 0.601 7 | 0.005 1 | 1.188 1 | 0.010 6 | 1.816 3 | 0.012 3 | |
| FINet[ | 3.501 4 | 0.033 0 | 6.854 5 | 0.068 0 | 5.233 4 | 0.047 4 | |
| RGM[ | 1.835 1 | 0.014 5 | 3.540 2 | 0.031 2 | 8.090 0 | 0.050 6 | |
| GeoTransformer[ | 0.566 2 | 0.005 4 | 1.095 5 | 0.011 3 | |||
| LFGNet[ | 1.211 9 | 0.009 9 | 2.312 1 | 0.021 3 | 4.423 2 | 0.036 3 | |
| GMCNet[ | 2.446 8 | 0.019 5 | 4.840 4 | 0.040 5 | 8.195 4 | 0.057 6 | |
| IFNet[ | 1.600 7 | 0.011 2 | 3.048 5 | 0.022 1 | 6.932 3 | 0.033 5 | |
| SharpGConv[ | 1.337 4 | 0.009 8 | |||||
| NATA | 0.170 3 | 0.001 5 | 0.319 6 | 0.003 1 | 0.351 1 | 0.005 0 | |
| [1] | ZHENG Y, LI Y, YANG S, et al. Global-PBNet: a novel point cloud registration for autonomous driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(11): 22312-22319. |
| [2] | HUANG Z, WEN Y, WANG Z, et al. Surface reconstruction from point clouds: a survey and a benchmark[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2024, 46(12): 9727-9748. |
| [3] | ZHENG C, WU W, CHEN C, et al. Deep learning-based human pose estimation: a survey[J]. ACM Computing Surveys, 2024, 56(1): No.11. |
| [4] | DANG Z, WANG L, GUO Y, et al. Match normalization: learning-based point cloud registration for 6D object pose estimation in the real world[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2024, 46(6): 4489-4503. |
| [5] | PLACED J A, STRADER J, CARRILLO H, et al. A survey on active simultaneous localization and mapping: state of the art and new frontiers[J]. IEEE Transactions on Robotics, 2023, 39(3): 1686-1705. |
| [6] | BESI P J, McKAY N D. A method for registration of 3-D shapes[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1992, 14(2): 239-256. |
| [7] | FISCHLER M A, BOLLES R C. Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography[J]. Communications of the ACM, 1981, 24(6): 381-395. |
| [8] | WANG Y, SOLOMON J. PRNet: self-supervised learning for partial-to-partial registration[C]// Proceedings of the 33rd International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2019: 8814-8826. |
| [9] | ZHANG X, YANG J, ZHANG S, et al. 3D registration with maximal cliques[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 17745-17754. |
| [10] | XU J, HUANG Y, WAN Z, et al. GLORN: strong generalization fully convolutional network for low-overlap point cloud registration[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: No.5704814. |
| [11] | WANG Y, YAN C, FENG Y, et al. STORM: structure-based overlap matching for partial point cloud registration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(1): 1135-1149. |
| [12] | GUO L, CHEN Z, CHENG S, et al. Learning compact and overlap-biased interactions for point cloud registration[J]. Neurocomputing, 2024, 598: No.127949. |
| [13] | YUAN Y, WU Y, FAN X, et al. EGST: enhanced geometric structure Transformer for point cloud registration[J]. IEEE Transactions on Visualization and Computer Graphics, 2024, 30(9): 6222-6234. |
| [14] | WANG Y, ZHOU P, GENG G, et al. CCAG: end-to-end point cloud registration[J]. IEEE Robotics and Automation Letters, 2024, 9(1): 435-442. |
| [15] | LV C, LIN W, ZHAO B. KSS-ICP: point cloud registration based on Kendall shape space[J]. IEEE Transactions on Image Processing, 2023, 32: 1681-1693. |
| [16] | HE L, WANG S, HU Q, et al. GFOICP: geometric feature optimized iterative closest point for 3-D point cloud registration[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: No.5704217. |
| [17] | AIGER D, MITRA N J, COHEN-OR D. 4-points congruent sets for robust pairwise surface registration[J]. ACM Transactions on Graphics, 2008, 27(3): 1-10. |
| [18] | CHEN H, CHEN B, ZHAO Z, et al. Point cloud registration based on learning Gaussian mixture models with global-weighted local representations[J]. IEEE Geoscience and Remote Sensing Letters, 2023, 20: No.6500505. |
| [19] | AOKI Y, GOFORTH H, SRIVATSAN R A, et al. PointNetLK: robust & efficient point cloud registration using PointNet[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 7156-7165. |
| [20] | QI C R, SU H, MO K, et al. PointNet: deep learning on point sets for 3D classification and segmentation[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 77-85. |
| [21] | YEW Z J, LEE G H. RPM-Net: robust point matching using learned features[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 11821-11830. |
| [22] | XU H, LIU S, WANG G, et al. OMNet: learning overlapping mask for partial-to-partial point cloud registration[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 3112-3121. |
| [23] | GINZBURG D, RAVIV D. Deep weighted consensus dense correspondence confidence maps for 3D shape registration[C]// Proceedings of the 2022 IEEE International Conference on Image Processing. Piscataway: IEEE, 2022: 71-75. |
| [24] | WANG Y, SOLOMON J. Deep Closest Point: learning representations for point cloud registration[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 3522-3531. |
| [25] | QIN Z, YU H, WANG C, et al. GeoTransformer: fast and robust point cloud registration with geometric Transformer[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(8): 9806-9821. |
| [26] | XIE Y, WANG B, LI S, et al. Iterative feedback network for unsupervised point cloud registration[J]. IEEE Robotics and Automation Letters, 2024, 9(3): 2327-2334. |
| [27] | FU K, LUO J, LUO X, et al. Robust point cloud registration framework based on deep graph matching[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(5): 6183-6195. |
| [28] | SHI C, CHEN X, HUANG K, et al. Keypoint matching for point cloud registration using multiplex dynamic graph attention networks[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 8221-8228. |
| [29] | ZAMAN A, YANGYU F, AYUB M S, et al. CMDGAT: knowledge extraction and retention based continual graph attention network for point cloud registration[J]. Expert Systems with Applications, 2023, 214: No.119098. |
| [30] | SUN L, ZHANG Z, ZHONG R, et al. A weakly supervised graph deep learning framework for point cloud registration[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: No.5702012. |
| [31] | LIU S, WANG T, ZHANG Y, et al. Deep semantic graph matching for large-scale outdoor point cloud registration[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: No.5701412. |
| [32] | PAN L, CAI Z, LIU Z. Robust partial-to-partial point cloud registration in a full range[J]. IEEE Robotics and Automation Letters, 2024, 9(3): 2861-2868. |
| [33] | SHE R, KANG Q, WANG S, et al. PointDifformer: robust point cloud registration with neural diffusion and Transformer[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: No.5701015. |
| [34] | GUO M H, XU T X, LIU J J, et al. Attention mechanisms in computer vision: a survey[J]. Computational Visual Media, 2022, 8(3): 331-368. |
| [35] | WU Z, SONG S, KHOSLA A, et al. 3D ShapeNets: a deep representation for volumetric shapes[C]// Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2015: 1912-1920. |
| [36] | YI L, KIM V G, CEYLAN D, et al. A scalable active framework for region annotation in 3D shape collections[J]. ACM Transactions on Graphics, 2016, 35(6): No.210. |
| [37] | BOGO F, ROMERO J, LOPER M, et al. FAUST: dataset and evaluation for 3D mesh registration[C]// Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2014: 3794-3801. |
| [38] | HEZRONI I, DRORY A, GIRYES R, et al. DeepBBS: deep best buddies for point cloud registration[C]// Proceedings of the 2021 International Conference on 3D Vision. Piscataway: IEEE, 2021: 342-351. |
| [39] | LI J, ZHANG C, XU Z, et al. Iterative distance-aware similarity matrix convolution with mutual-supervised point elimination for efficient point cloud registration[C]// Proceedings of the 2020 European Conference on Computer Vision, LNCS 12369. Cham: Springer, 2020: 378-394. |
| [40] | HUANG S, GOJCIC Z, USVYATSOV M, et al. PREDATOR: registration of 3D point clouds with low overlap[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 4265-4274. |
| [41] | YEW Z J, LEE G H. REGTR: end-to-end point cloud correspondences with Transformers[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 6667-6676. |
| [42] | XU H, YE N, LIU G, et al. FINet: dual branches feature interaction for partial-to-partial point cloud registration[C]// Proceedings of the 36th AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2022: 2848-2856. |
| [43] | LIU Z, HE K, ZHANG D, et al. Local feature guidance framework for robust 3D point cloud registration[J]. The Visual Computer, 2023, 39(12): 6459-6472. |
| [44] | CAO F, WANG L, YE H. SharpGConv: a novel graph method with plug-and-play sharpening convolution for point cloud registration[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2024, 34(8): 7095-7105. |
| [1] | 张宏俊, 潘高军, 叶昊, 陆玉彬, 缪宜恒. 结合深度学习和张量分解的多源异构数据分析方法[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2838-2847. |
| [2] | 李进, 刘立群. 基于残差Swin Transformer的SAR与可见光图像融合[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2949-2956. |
| [3] | 殷兵, 凌震华, 林垠, 奚昌凤, 刘颖. 兼容缺失模态推理的情感识别方法[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2764-2772. |
| [4] | 吕景刚, 彭绍睿, 高硕, 周金. 复频域注意力和多尺度频域增强驱动的语音增强网络[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2957-2965. |
| [5] | 李维刚, 邵佳乐, 田志强. 基于双注意力机制和多尺度融合的点云分类与分割网络[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 3003-3010. |
| [6] | 王翔, 陈志祥, 毛国君. 融合局部和全局相关性的多变量时间序列预测方法[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2806-2816. |
| [7] | 许志雄, 李波, 边小勇, 胡其仁. 对抗样本嵌入注意力U型网络的3D医学图像分割[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 3011-3016. |
| [8] | 景攀峰, 梁宇栋, 李超伟, 郭俊茹, 郭晋育. 基于师生学习的半监督图像去雾算法[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2975-2983. |
| [9] | 石超, 周昱昕, 扶倩, 唐万宇, 何凌, 李元媛. 基于骨架和3D热图的注意缺陷多动障碍患者动作识别算法[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 3036-3044. |
| [10] | 邓伊琳, 余发江. 基于LSTM和可分离自注意力机制的伪随机数生成器[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2893-2901. |
| [11] | 彭鹏, 蔡子婷, 刘雯玲, 陈才华, 曾维, 黄宝来. 基于CNN和双向GRU混合孪生网络的语音情感识别方法[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2515-2521. |
| [12] | 敬超, 全育涛, 陈艳. 基于多层感知机-注意力模型的功耗预测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2646-2655. |
| [13] | 张硕, 孙国凯, 庄园, 冯小雨, 王敬之. 面向区块链节点分析的eclipse攻击动态检测方法[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2428-2436. |
| [14] | 林进浩, 罗川, 李天瑞, 陈红梅. 基于跨尺度注意力网络的胸部疾病分类方法[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2712-2719. |
| [15] | 葛丽娜, 王明禹, 田蕾. 联邦学习的高效性研究综述[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2387-2398. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||