


Journal of Computer Applications ›› 0, Vol. ›› Issue (): 192-200.DOI: 10.11772/j.issn.1001-9081.2023081097
• Multimedia computing and computer simulation • Previous Articles Next Articles
Xiangjun ZHANG, Guoshu HUANG, Tao QIU( ), Ming WANG, Xungang YIN, Bingbing FAN
), Ming WANG, Xungang YIN, Bingbing FAN
Received:2023-08-14
Revised:2024-03-21
Accepted:2024-03-25
Online:2025-01-24
Published:2024-12-31
Contact:
Tao QIU
张向军, 黄国书, 邱涛(), 王明, 尹逊刚, 范兵兵
通讯作者:
邱涛
作者简介:张向军(1981—),男,河南安阳人,高级工程师,硕士,CCF会员,主要研究方向:虚拟现实、系统软件CLC Number:
Xiangjun ZHANG, Guoshu HUANG, Tao QIU, Ming WANG, Xungang YIN, Bingbing FAN. Design and implementation of VR head tracking system based on ARM platform[J]. Journal of Computer Applications, 0, (): 192-200.
张向军, 黄国书, 邱涛, 王明, 尹逊刚, 范兵兵. 基于ARM平台的VR头部追踪系统的设计与实现[J]. 《计算机应用》唯一官方网站, 0, (): 192-200.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2023081097
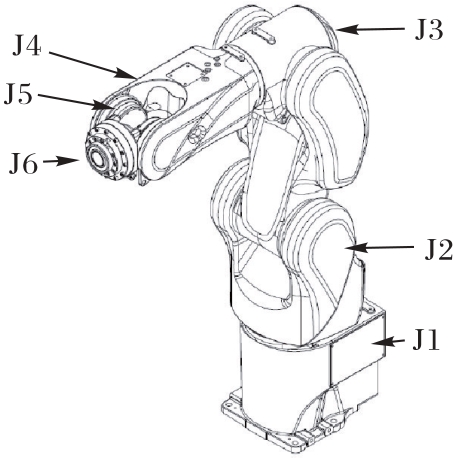
| 坐标轴 | 平移 | 旋转 | 移动速度/(mm·s-1) |
|---|---|---|---|
| X | J2 | J4 | 240 |
| Y | J1 | J5 | 240 |
| Z | J3 | J6 | 240 |
| 坐标轴 | 平移 | 旋转 | 移动速度/(mm·s-1) |
|---|---|---|---|
| X | J2 | J4 | 240 |
| Y | J1 | J5 | 240 |
| Z | J3 | J6 | 240 |
| 参数 | Camera1 | Camera2 | 参数 | Camera1 | Camera2 |
|---|---|---|---|---|---|
| fx | 242.863 1 | 242.866 9 | k1 | -0.023 4 | -0.033 7 |
| fy | 243.056 7 | 242.833 7 | k2 | 0.096 1 | 0.119 1 |
| cx | 318.899 7 | 319.951 9 | k3 | -0.066 9 | -0.089 2 |
| cy | 239.252 9 | 239.632 2 | k4 | 0.012 1 | 0.019 6 |
| 参数 | Camera1 | Camera2 | 参数 | Camera1 | Camera2 |
|---|---|---|---|---|---|
| fx | 242.863 1 | 242.866 9 | k1 | -0.023 4 | -0.033 7 |
| fy | 243.056 7 | 242.833 7 | k2 | 0.096 1 | 0.119 1 |
| cx | 318.899 7 | 319.951 9 | k3 | -0.066 9 | -0.089 2 |
| cy | 239.252 9 | 239.632 2 | k4 | 0.012 1 | 0.019 6 |
| 指标 | Camera1/px | Camera2/px | 陀螺仪/(rad·s-1) | 加速度计/(m·s-2) |
|---|---|---|---|---|
| 平均值 | 0.114 6 | 0.102 8 | 0.008 4 | 0.061 6 |
| 标准差 | 0.073 4 | 0.063 6 | 0.007 7 | 0.136 6 |
| 指标 | Camera1/px | Camera2/px | 陀螺仪/(rad·s-1) | 加速度计/(m·s-2) |
|---|---|---|---|---|
| 平均值 | 0.114 6 | 0.102 8 | 0.008 4 | 0.061 6 |
| 标准差 | 0.073 4 | 0.063 6 | 0.007 7 | 0.136 6 |
| 误差类型 | 陀螺仪 | 加速度计 |
|---|---|---|
| 噪声密度 | 3.911 367 04 rad/s0.5 | 0.000 570 16 m/s1.5 |
| 随机游走 | 1.535 914 64 rad/s1.5 | 2.607 395 48 m/s2.5 |
| 误差类型 | 陀螺仪 | 加速度计 |
|---|---|---|
| 噪声密度 | 3.911 367 04 rad/s0.5 | 0.000 570 16 m/s1.5 |
| 随机游走 | 1.535 914 64 rad/s1.5 | 2.607 395 48 m/s2.5 |
| 追踪状态 | 状态值 | 追踪状态 | 状态值 |
|---|---|---|---|
| SYSTEM_NOT_READY | -1 | RECENTLY_LOST | 3 |
| NO_IMAGES_YET | 0 | LOST | 4 |
| NOT_INITIALIZED | 1 | OK_KLT | 5 |
| OK | 2 | CAMERA_COVERED | 6 |
| 追踪状态 | 状态值 | 追踪状态 | 状态值 |
|---|---|---|---|
| SYSTEM_NOT_READY | -1 | RECENTLY_LOST | 3 |
| NO_IMAGES_YET | 0 | LOST | 4 |
| NOT_INITIALIZED | 1 | OK_KLT | 5 |
| OK | 2 | CAMERA_COVERED | 6 |


| 硬件模块 | 选型 | 规格 |
|---|---|---|
应用 处理器 | 高通 SXR2130P | CPU: 8核 操作系统:Android 10 |
Camera 传感器*2 | OV7251 | 支持分辨率:640*480,320*240,160*120 支持输出格式:8/10-bit RAW |
IMU 传感器 | ICM-42688-P | 陀螺仪: 量程/精度:±2 000 dps; 16/19-bits 加速度计: 量程/精度:±16g; 16/18-bits |
| 硬件模块 | 选型 | 规格 |
|---|---|---|
应用 处理器 | 高通 SXR2130P | CPU: 8核 操作系统:Android 10 |
Camera 传感器*2 | OV7251 | 支持分辨率:640*480,320*240,160*120 支持输出格式:8/10-bit RAW |
IMU 传感器 | ICM-42688-P | 陀螺仪: 量程/精度:±2 000 dps; 16/19-bits 加速度计: 量程/精度:±16g; 16/18-bits |

| 测试指标 | 测试结果 |
|---|---|
| 运行总时间/s | 1 300 |
| 运行次数 | 10 |
| 单次运行时间/s | 130 |
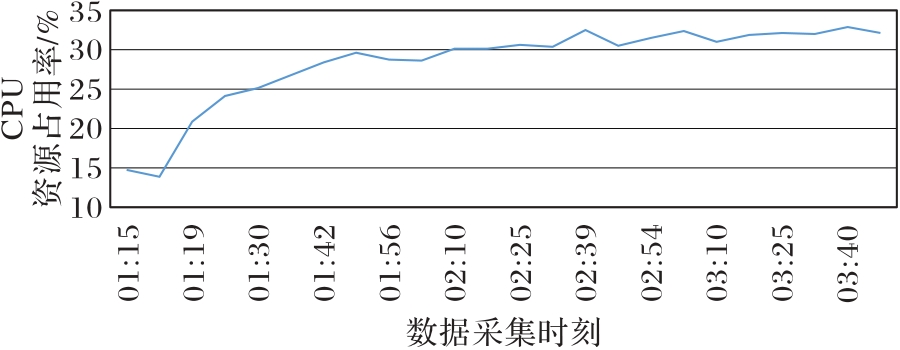
| CPU平均占用率/% | 28 |
| CPU最大占用率/% | 33 |
| 测试指标 | 测试结果 |
|---|---|
| 运行总时间/s | 1 300 |
| 运行次数 | 10 |
| 单次运行时间/s | 130 |
| CPU平均占用率/% | 28 |
| CPU最大占用率/% | 33 |
| 参数 | 值 | 参数 | 值 |
|---|---|---|---|
| 分辨率 | 2 048*1 536 | 视场角/(°) | 60*46 |
| 帧率/(frame·s-1) | 120 | 最远工作距离/m | 18 |
| 参数 | 值 | 参数 | 值 |
|---|---|---|---|
| 分辨率 | 2 048*1 536 | 视场角/(°) | 60*46 |
| 帧率/(frame·s-1) | 120 | 最远工作距离/m | 18 |
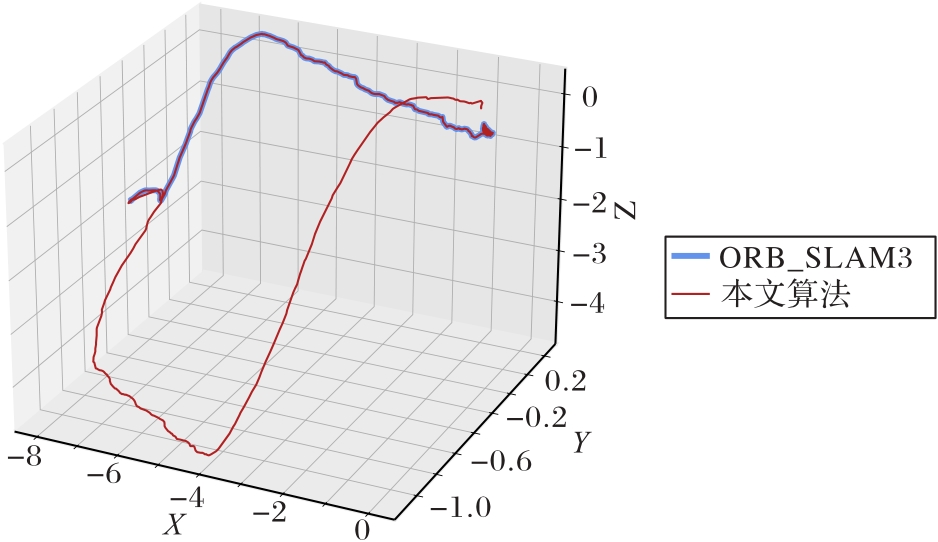
| 指标 | ORB-SLAM3算法/优化后算法 | |||
|---|---|---|---|---|
| Max | Min | RMS | Mean | |
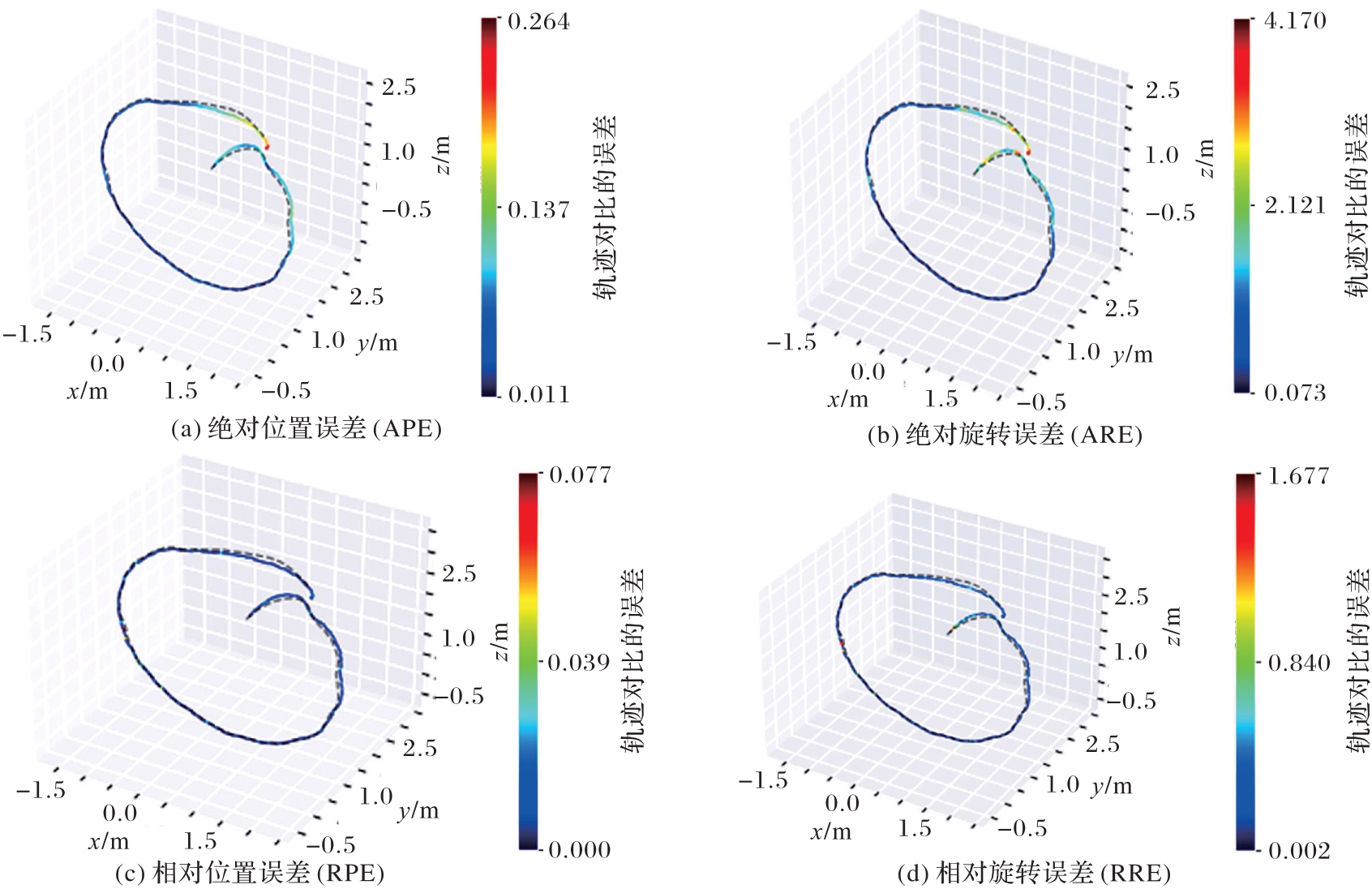
| APE/m | 0.687/0.263 | 0.027/0.011 | 0.251/0.124 | 0.203/0.100 |
| ARE/(°) | 30.48/4.170 | 0.056/1.002 | 5.989/1.933 | 4.845/1.534 |
| RPE/m | 0.096/0.077 | 0.001/0.000 1 | 0.011/0.008 | 0.009/0.005 |
| RRE/(°) | 4.871/1.677 | 0.023/0.002 | 0.893/0.264 | 0.753/0.200 |
| 指标 | ORB-SLAM3算法/优化后算法 | |||
|---|---|---|---|---|
| Max | Min | RMS | Mean | |
| APE/m | 0.687/0.263 | 0.027/0.011 | 0.251/0.124 | 0.203/0.100 |
| ARE/(°) | 30.48/4.170 | 0.056/1.002 | 5.989/1.933 | 4.845/1.534 |
| RPE/m | 0.096/0.077 | 0.001/0.000 1 | 0.011/0.008 | 0.009/0.005 |
| RRE/(°) | 4.871/1.677 | 0.023/0.002 | 0.893/0.264 | 0.753/0.200 |
| 1 | 高翔,张涛,刘毅,等. 视觉SLAM十四讲:从理论到实践[M]. 2版. 北京:电子工业出版社, 2019: 283-303. |
| 2 | KHOLE A, THAKAR A, SHENDE S, et al. A comprehensive study on Simultaneous Localization and Mapping (SLAM): types, challenges and applications[C]// Proceedings of the 2023 International Conference on Sustainable Computing and Smart Systems. Piscataway: IEEE, 2023: 643-650. |
| 3 | SHIN U, LEE K, LEE S, et al. Self-supervised depth and ego-motion estimation for monocular thermal video using multi-spectral consistency loss[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 1103-1110. |
| 4 | ZHU Z, PENG S, LARSSON V, et al. NICE-SLAM: neural implicit scalable encoding for SLAM[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 12776-12786. |
| 5 | KLEIN G, MURRAY D. Parallel tracking and mapping for small AR workspaces[C]// Proceedings of the 6th IEEE and ACM International Symposium on Mixed and Augmented Reality. Piscataway: IEEE, 2007: 225-234. |
| 6 | MUR-ARTAL R, MONTIEL J M M, TARDÓS J D. ORB-SLAM: a versatile and accurate monocular SLAM system[J]. IEEE Transactions on Robotics, 2015, 31(5):1147-1163. |
| 7 | MUR-ARTAL R, TARDÓS J D. ORB-SLAM2: an open-source SLAM system for monocular, stereo, and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262. |
| 8 | CAMPOS C, ELVIRA R, RODRÍGUEZ J J G, et al. ORB-SLAM3: an accurate open-source library for visual, visual-inertial, and multimap SLAM[J]. IEEE Transactions on Robotics, 2021, 37(6): 1874-1890. |
| 9 | YU Z, PENG S, NIEMEYERM, et al. MonoSDF: exploring monocular geometric cues for neural implicit surface reconstruction[C]// Proceedings of the 36th International Conference on Neural Information Processing Systems. Red Hook, NY: Curran Associates Inc., 2022: 25018-25032. |
| 10 | CHAN E R, LIN C Z, CHAN M A, et al. Efficient geometry-aware 3D generative adversarial networks[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 16102-16112. |
| 11 | KARNEWAR A, RITSCHEL T, WANG O, et al. ReLU fields: the little non-linearity that could[C]// Proceedings of the 2022 ACM SIGGRAPH Conference. New York: ACM, 2022: No.27. |
| 12 | FRIDOVICH-KEIL S, YU A, TANCIK M, et al. Plenoxels: Radiance fields without neural networks[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 5491-5500. |
| 13 | EFTEKHAR A, SAX A, MALIK J, et al. Omnidata: a scalable pipeline for making multi-task mid-level vision datasets from 3D scans[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 10766-10776. |
| 14 | SARLIN P E, UNAGAR A, LARSSON M, et al. Back to the feature: learning robust camera localization from pixels to pose[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 3246-3256. |
| 15 | SHAN W, LU H, WANG S, et al. Improving robustness and accuracy via relative information encoding in 3D human pose estimation[C]// Proceedings of the 29th ACM International Conference on Multimedia. New York: ACM, 2021: 3446-3454. |
| 16 | LIU Z, LIN Y, CAO Y, et al. Swin Transformer: hierarchical vision Transformer using shifted windows[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 9992-10002. |
| 17 | CAMPOS C, MONTIEL J M M, TARDÓS J D. Inertial-only optimization for visual-inertial initialization[C]// Proceedings of the 2020 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2020: 51-57. |
| 18 | ELVIRA R, TARDÓS J D, MONTIEL J M M. ORBSLAM-Atlas: a robust and accurate multi-map system[C]// Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2019: 6253-6259. |
| 19 | 赵珊,管启,丁德锐,等. COVFast-LCD:一种组合ORB和VLAD特征的快速回环检测算法[J]. 小型微型计算机系统, 2023, 44(6):1318-1323. |
| 20 | 许芬,王振. 基于Kinect传感器和ORB特征的视觉SLAM算法设计与实现[J]. 计算机工程与科学, 2018, 40(5): 836-841. |
| 21 | HOU L, XU X, ITO T, et al. An optimization-based IMU/lidar/camera co-calibration method[C]// Proceedings of the 7th International Conference on Robotics and Automation Engineering. Piscataway: IEEE, 2022: 118-122. |
| 22 | HUAI J, ZHUANG Y, LIN Y, et al. Continuous-time spatiotemporal calibration of a rolling shutter camera-IMU system[J]. IEEE Sensors Journal, 2022, 22(8): 7920-7930. |
| 23 | REHDER J, NIKOLIC J, SCHNEIDER T, et al. Extending kalibr: calibrating the extrinsics of multiple IMUs and of individual axes[C]// Proceedings of the 2016 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2016: 4304-4311. |
| 24 | KANNALA J, BRANDT S S. A generic camera model and calibration method for conventional, wide-angle, and fish-eye lenses[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2006, 28(8): 1335-1340. |
| 25 | FURGALE P, REHDER J, SIEGWART R. Unified temporal and spatial calibration for multi-sensor systems[C]// Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2013: 1280-1286. |
| 26 | WANG Z, PANG B, SONG Y, et al. Robust visual-inertial odometry based on a Kalman filter and factor graph[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(7): 7048-7060. |
| 27 | YEH S H, WANG D, YAN W, et al. Detection of camera model inconsistency and the existence of optical image stabilization system[C]// Proceedings of the IEEE 18th International Conference on Automation Science and Engineering. Piscataway: IEEE, 2022: 1358-1363. |
| 28 | CAI J, YANG K, CHENG L, et al. Pixel-wise fisheye image correction method with single-view phase target[J]. IEEE Photonics Technology Letters, 2022, 34(19): 1038-1041. |
| 29 | YIN H, LIU P X, ZHENG M. Stereo visual-inertial odometry with online initialization and extrinsic self-calibration[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: No.9508210. |
| 30 | QIN T, LI P, SHEN S. VINS-Mono: a robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4): 1004-1020. |
| 31 | FENG L, ZHANG X, PENG X, et al. Monocular visual-inertial odometry with point and line features using improved line feature extraction[C]// Proceedings of the 2022 China Automation Congress. Piscataway: IEEE, 2022: 4107-4112. |
| 32 | WANG S, ZHANG A, LI Y. Feature extraction algorithm based on improved ORB with adaptive threshold[C]// Proceedings of the 2023 IEEE International Conference on Industrial Technology. Piscataway: IEEE, 2023: 1-6. |
| 33 | CHUNG C M, TSENG Y C, HSU Y C, et al. Orbeez-SLAM: a real-time monocular visual slam with orb features and nerf-realized mapping[C]// Proceedings of the 2023 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2023: 9400-9406. |
| 34 | DAVISON A J, REID I D, MOLTON N D, et al. MonoSLAM: real-time single camera SLAM[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(6): 1052-1067. |
| 35 | AZIMI A, HOSSEININAVEH AHMADABADIAN A, REMONDINO F. PKS: a photogrammetric key-frame selection method for visual-inertial systems built on ORB-SLAM3[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2022, 191: 18-32. |
| 36 | AZIMI A, HOSSEININAVEH A, REMONDINO F. A novel geometric key-frame selection method for visual-inertial SLAM and odometry systems[J]. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2022, XLIII-B2-2022: 9-14. |
| 37 | WU Z, PAN S, CHEN F, et al. A comprehensive survey on graph neural networks[J]. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(1): 4-24. |
| 38 | YU Y, LIU Y, FU F, et al. Fast extrinsic calibration for multiple inertial measurement units in visual-inertial system[C]// Proceedings of the 2023 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2023: 1-7. |
| [1] | Yi XIONG, Caiqi WANG, Ling MEI, Shiqian WU. Global feature pose estimation method based on keypoint distance [J]. Journal of Computer Applications, 2026, 46(1): 260-269. |
| [2] | Jian LIU, Chenchen YOU, Jinming CAO, Qiong ZENG, Changhe TU. Construction and application of 3D dataset of human grasping objects [J]. Journal of Computer Applications, 2024, 44(1): 278-284. |
| [3] | Jinyan LU, Xiaoke QI. Decoupled visual servoing control method based on point and line features [J]. Journal of Computer Applications, 2022, 42(8): 2556-2563. |
| [4] | Jieke WANG, Lin LI, Hailong ZHANG, Liping ZHENG. Passive haptic interaction method for multiple virtual targets in vast virtual reality space [J]. Journal of Computer Applications, 2022, 42(11): 3544-3550. |
| [5] | Shouming HOU, Chaolan JIA, Mingmin ZHANG. Review of eye movement‑based interaction techniques for virtual reality systems [J]. Journal of Computer Applications, 2022, 42(11): 3534-3543. |
| [6] | WANG Yi, LYU Jian, YOU Qian, ZHAO Zeyu, YAN Baoming, ZHU Shuman. Virtual reality arbitrary shape selection model based on Fitts' law [J]. Journal of Computer Applications, 2020, 40(11): 3320-3326. |
| [7] | FANG Guokang, LI Jun, WANG Yaoru. Real-time face recognition on ARM platform based on deep learning [J]. Journal of Computer Applications, 2019, 39(8): 2217-2222. |
| [8] | HU Min, LI Chong, LU Rongrong, HUANG Hongcheng. Performance analysis of motor imagery training based on 3D visual guidance [J]. Journal of Computer Applications, 2018, 38(3): 836-841. |
| [9] | ZHOU Feng, LIN Nan, CHEN Xiaoping. Inverse kinematics equation solving method for six degrees of freedom manipulator based on six dimensional linear interpolation [J]. Journal of Computer Applications, 2018, 38(2): 563-567. |
| [10] | LIN Chang, LI Guoping, ZHAO Haiwu, WANG Guozhong, GU Xiao. Double ring mapping projection for panoramic video [J]. Journal of Computer Applications, 2017, 37(9): 2631-2635. |
| [11] | WU Saiwen, CHEN Jian, SUN Xiaoying. Electrostatic force tactile rendering method for video perception [J]. Journal of Computer Applications, 2016, 36(4): 1137-1140. |
| [12] | LI Danni, LIU Qi, TIAN Qi, ZHAO Leiyu, HE Ling, HUANG Yunzhi, ZHANG Jing. Design of virtual surgery system in reduction of maxillary fracture [J]. Journal of Computer Applications, 2015, 35(6): 1730-1733. |
| [13] | CAO Yanjue, AN Bowen, LI Qiming. Real-time simulation and application of depth-of-field based on post-processing [J]. Journal of Computer Applications, 2015, 35(5): 1439-1443. |
| [14] | YANG Xiaowen, ZHANG Zhichun, KUANG liqun, HAN Xie. Key technologies of human-computer interaction based on virtual hand [J]. Journal of Computer Applications, 2015, 35(10): 2945-2949. |
| [15] | TANG Yong HU Ming-hua WU Hong-gang HUANG Zhong-tao XU Zi-li HE Dong-lin. 3D Simulation of A-SMGCS Surface Movement Based on FlightGear [J]. Journal of Computer Applications, 2012, 32(11): 3228-3231. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||