


Journal of Computer Applications ›› 2026, Vol. 46 ›› Issue (2): 613-619.DOI: 10.11772/j.issn.1001-9081.2025020170
• Multimedia computing and computer simulation • Previous Articles
Quanjie LIU1, Zhaoyi GU2, Chunyuan WANG1( )
)
Received:2025-02-24
Revised:2025-04-29
Accepted:2025-04-30
Online:2025-05-16
Published:2026-02-10
Contact:
Chunyuan WANG
About author:LIU Quanjie, born in 2000, M. S. candidate. His research interests include object detection and tracking algorithms, deep learning.Supported by:
刘权捷1, 顾兆一2, 王春源1()
通讯作者:
王春源
作者简介:刘权捷(2000—),男,辽宁抚顺人,硕士研究生,CCF会员,主要研究方向:目标检测跟踪算法、深度学习基金资助:CLC Number:
Quanjie LIU, Zhaoyi GU, Chunyuan WANG. Unsafe driving behavior detection under complex lighting conditions[J]. Journal of Computer Applications, 2026, 46(2): 613-619.
刘权捷, 顾兆一, 王春源. 复杂光照条件下的不安全驾驶行为检测[J]. 《计算机应用》唯一官方网站, 2026, 46(2): 613-619.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2025020170
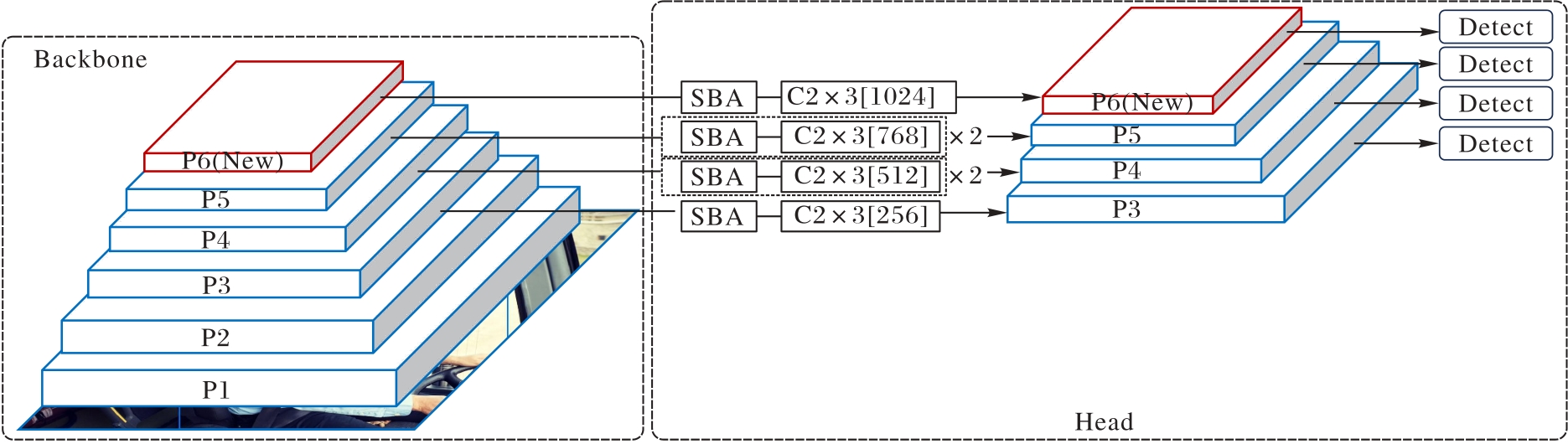
Fig. 1 Overall pyramid structure of improved YOLOv8n
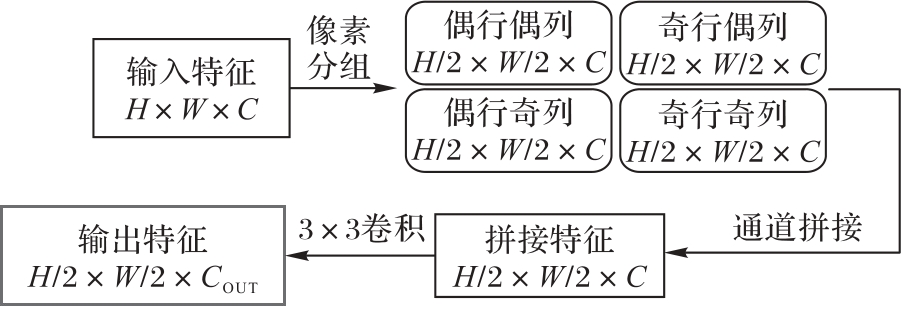
Fig. 2 SSAC structure
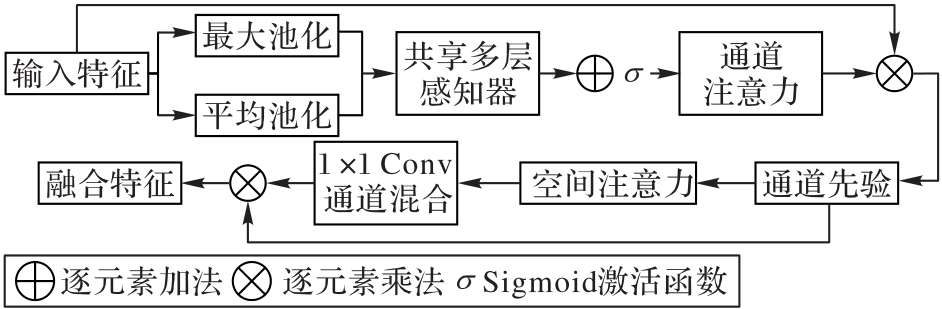
Fig. 3 CPCA structure
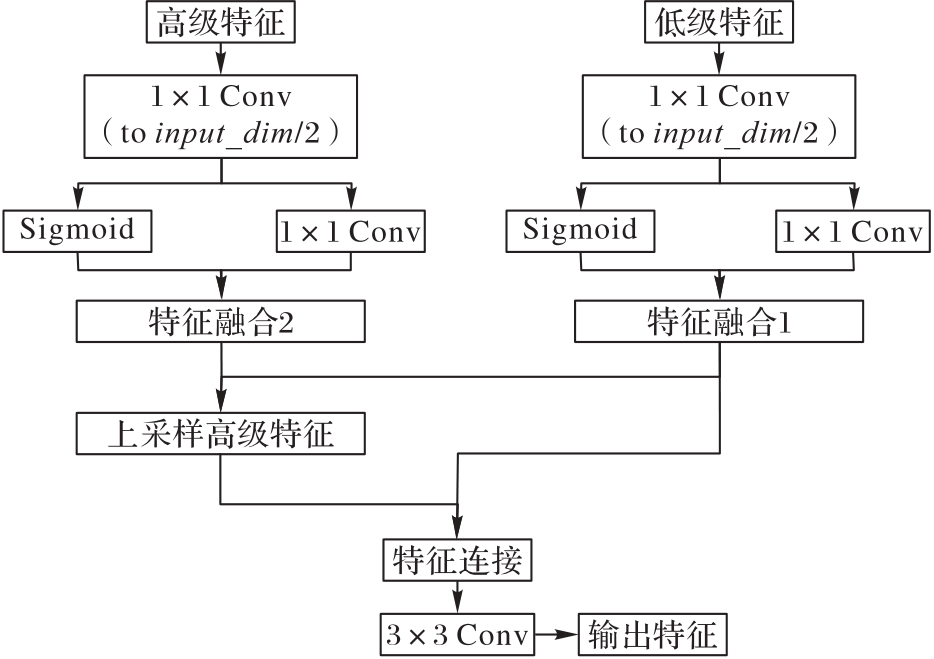
Fig. 4 Structure of SBA block
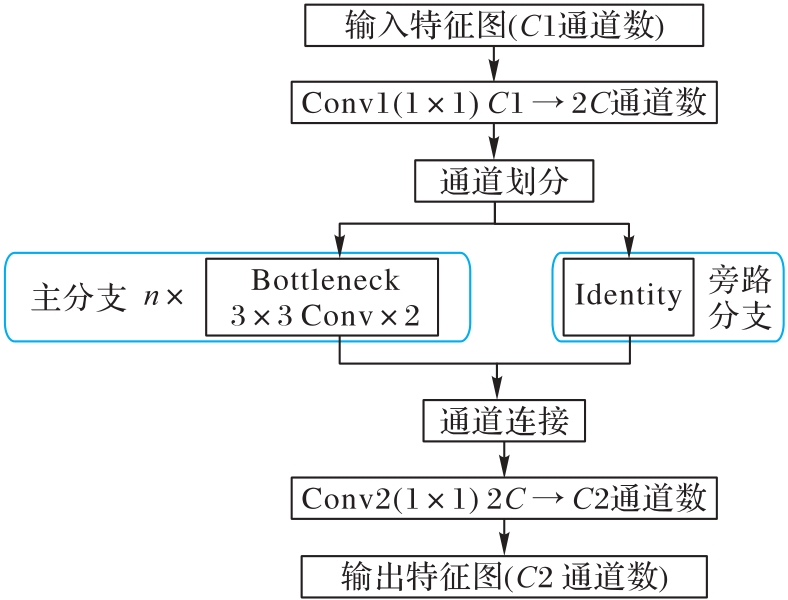
Fig. 5 Structure of C2 block
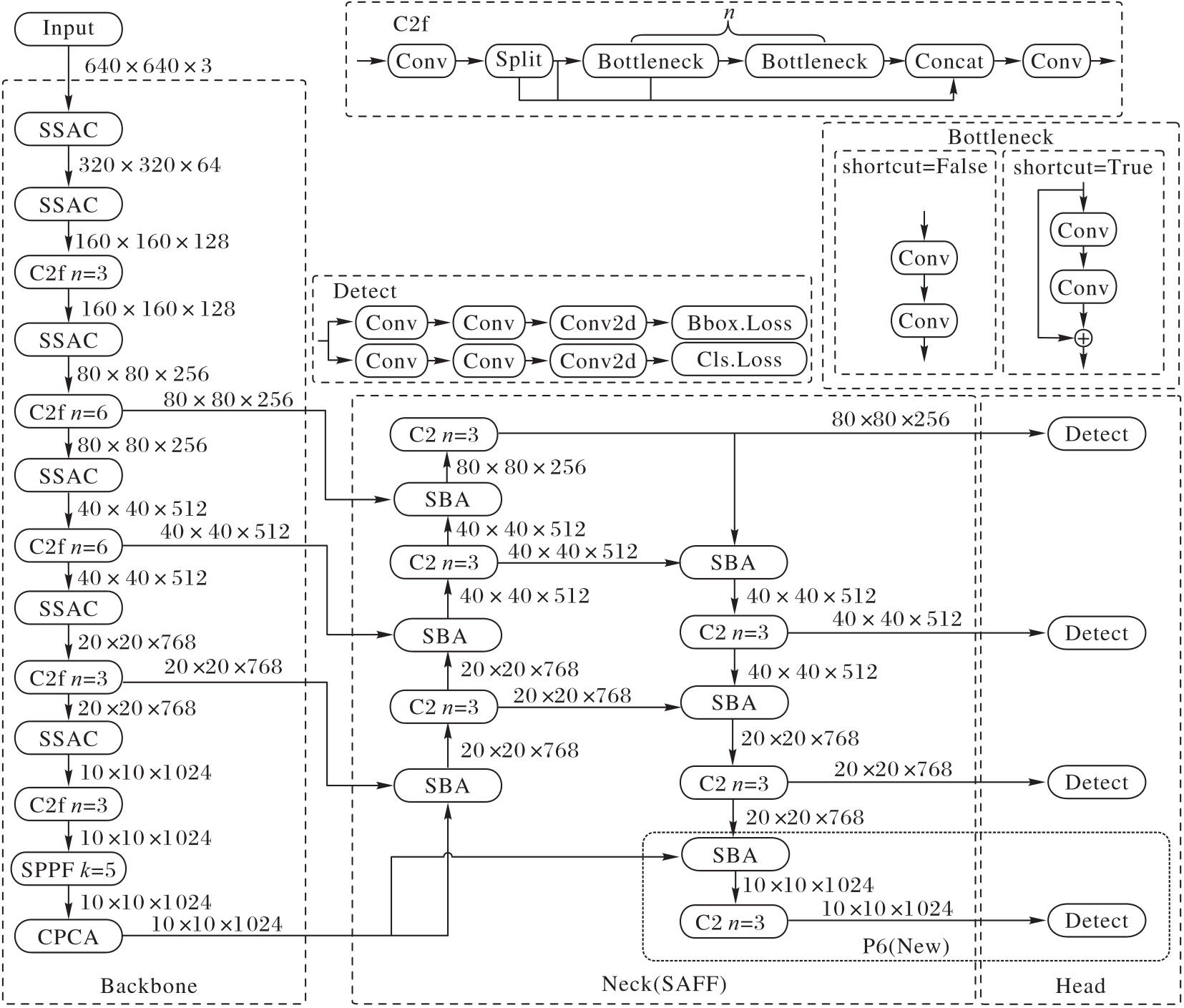
Fig. 6 Structure of improved YOLOv8n
| YOLOv8 | P6融合SAFF | CPCA | SSAC | mAP | mAP50:95 | mAP75 | R | AP | |||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 抽烟 | 安全带 | 手机 | 食物 | ||||||||
| √ | 0.969 | 0.735 | 0.869 | 0.780 | 0.910 | 0.978 | 0.945 | 0.883 | |||
| √ | √ | 0.972 | 0.732 | 0.855 | 0.782 | 0.911 | 0.970 | 0.965 | 0.880 | ||
| √ | √ | 0.966 | 0.725 | 0.862 | 0.775 | 0.903 | 0.978 | 0.944 | 0.876 | ||
| √ | √ | 0.972 | 0.727 | 0.874 | 0.780 | 0.905 | 0.975 | 0.952 | 0.875 | ||
| √ | √ | √ | 0.974 | 0.736 | 0.873 | 0.781 | 0.930 | 0.975 | 0.961 | 0.879 | |
| √ | √ | √ | 0.965 | 0.720 | 0.851 | 0.769 | 0.968 | 0.966 | 0.964 | 0.884 | |
| √ | √ | √ | 0.970 | 0.723 | 0.846 | 0.770 | 0.987 | 0.962 | 0.972 | 0.871 | |
| √ | √ | √ | √ | 0.990 | 0.751 | 0.886 | 0.792 | 0.968 | 0.979 | 0.969 | 0.917 |
Tab. 1 Ablation test results
| YOLOv8 | P6融合SAFF | CPCA | SSAC | mAP | mAP50:95 | mAP75 | R | AP | |||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 抽烟 | 安全带 | 手机 | 食物 | ||||||||
| √ | 0.969 | 0.735 | 0.869 | 0.780 | 0.910 | 0.978 | 0.945 | 0.883 | |||
| √ | √ | 0.972 | 0.732 | 0.855 | 0.782 | 0.911 | 0.970 | 0.965 | 0.880 | ||
| √ | √ | 0.966 | 0.725 | 0.862 | 0.775 | 0.903 | 0.978 | 0.944 | 0.876 | ||
| √ | √ | 0.972 | 0.727 | 0.874 | 0.780 | 0.905 | 0.975 | 0.952 | 0.875 | ||
| √ | √ | √ | 0.974 | 0.736 | 0.873 | 0.781 | 0.930 | 0.975 | 0.961 | 0.879 | |
| √ | √ | √ | 0.965 | 0.720 | 0.851 | 0.769 | 0.968 | 0.966 | 0.964 | 0.884 | |
| √ | √ | √ | 0.970 | 0.723 | 0.846 | 0.770 | 0.987 | 0.962 | 0.972 | 0.871 | |
| √ | √ | √ | √ | 0.990 | 0.751 | 0.886 | 0.792 | 0.968 | 0.979 | 0.969 | 0.917 |
| 光照条件 | 模型 | mAP | mAP50:95 | mAP75 | R |
|---|---|---|---|---|---|
| 正常光照 | YOLOv8n | 0.968 | 0.754 | 0.880 | 0.791 |
| 改进YOLOv8n | 0.985 | 0.768 | 0.908 | 0.804 | |
| 夜间条件 | YOLOv8n | 0.970 | 0.778 | 0.902 | 0.811 |
| 改进YOLOv8n | 0.987 | 0.799 | 0.925 | 0.825 | |
| 逆光条件 | YOLOv8n | 0.949 | 0.682 | 0.800 | 0.739 |
| 改进YOLOv8n | 0.972 | 0.695 | 0.811 | 0.748 |
Tab. 2 Performance comparison between improved and original YOLOv8n under different lighting conditions
| 光照条件 | 模型 | mAP | mAP50:95 | mAP75 | R |
|---|---|---|---|---|---|
| 正常光照 | YOLOv8n | 0.968 | 0.754 | 0.880 | 0.791 |
| 改进YOLOv8n | 0.985 | 0.768 | 0.908 | 0.804 | |
| 夜间条件 | YOLOv8n | 0.970 | 0.778 | 0.902 | 0.811 |
| 改进YOLOv8n | 0.987 | 0.799 | 0.925 | 0.825 | |
| 逆光条件 | YOLOv8n | 0.949 | 0.682 | 0.800 | 0.739 |
| 改进YOLOv8n | 0.972 | 0.695 | 0.811 | 0.748 |
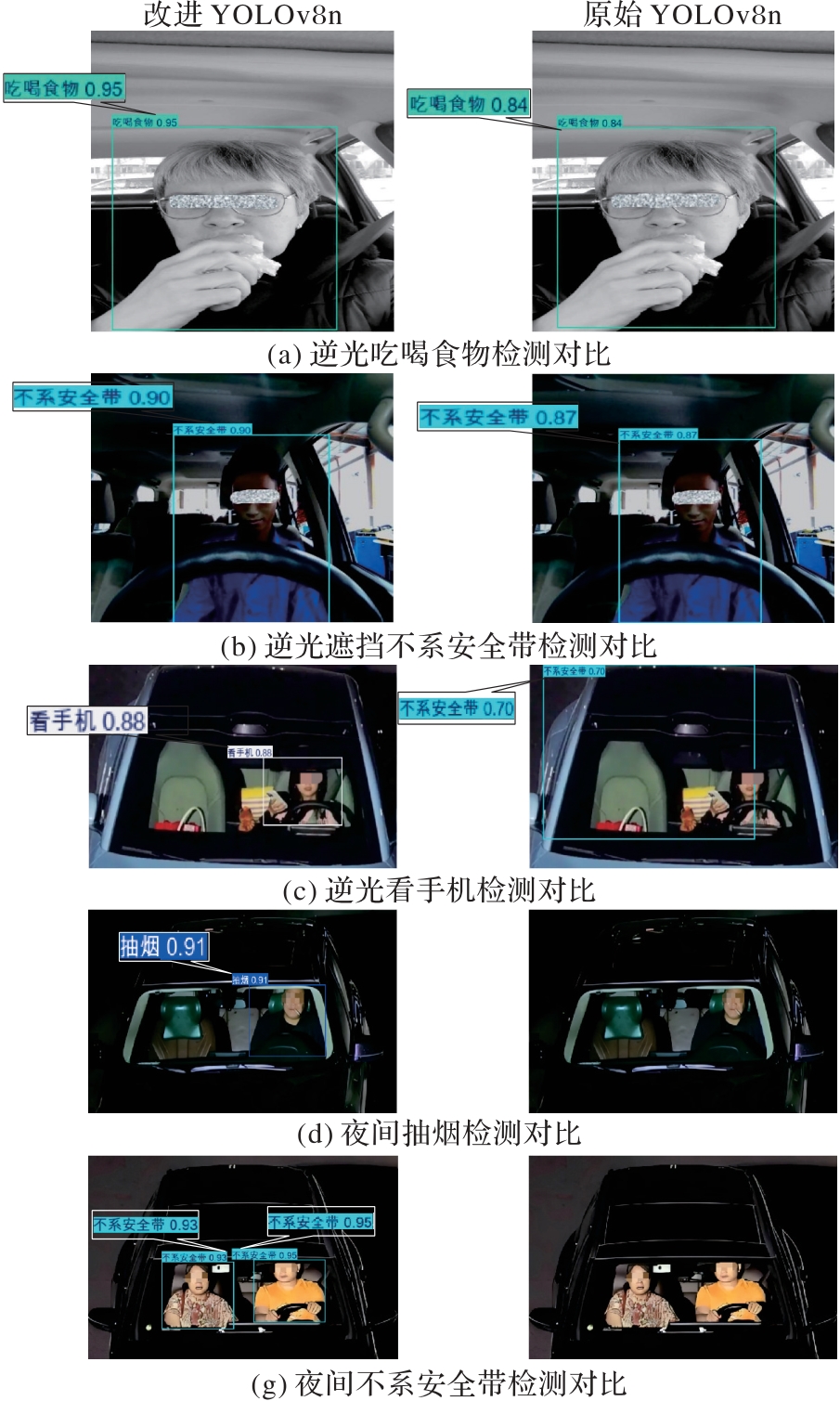
Fig. 7 Detection comparison between improved and original YOLOv8n
| 模型 | mAP | mAP50:95 | mAP75 | R | GFLOPs | Params/106 | FPS |
|---|---|---|---|---|---|---|---|
| YOLOv3 | 0.973 | 0.702 | 0.829 | 0.756 | 282.0 | 103.67 | 37 |
| YOLOv5n | 0.972 | 0.735 | 0.866 | 0.773 | 7.1 | 2.50 | 134 |
| YOLOv6n | 0.971 | 0.729 | 0.867 | 0.774 | 7.9 | 2.67 | 98 |
| YOLOv8n | 0.969 | 0.735 | 0.869 | 0.780 | 8.1 | 3.00 | 129 |
| YOLOv9t[ | 0.970 | 0.738 | 0.867 | 0.777 | 8.5 | 3.17 | 130 |
| YOLOv10n | 0.963 | 0.721 | 0.872 | 0.776 | 8.2 | 3.08 | 131 |
| YOLO11n | 0.964 | 0.727 | 0.868 | 0.773 | 6.3 | 2.19 | 141 |
| Gold-YOLO | 0.974 | 0.732 | 0.859 | 0.768 | 10.5 | 6.02 | 107 |
| YOLOv8-SPDConv | 0.967 | 0.733 | 0.856 | 0.771 | 9.7 | 4.74 | 111 |
| YOLOv8-EfficientViT | 0.968 | 0.725 | 0.845 | 0.777 | 9.4 | 4.18 | 113 |
| YOLOv8-StarNet | 0.970 | 0.719 | 0.853 | 0.770 | 6.5 | 2.21 | 138 |
| SSD-VGG16 | 0.962 | 0.731 | 0.859 | 0.764 | 98.0 | 28.17 | 64 |
| Faster-RCNN-R50-FPN | 0.974 | 0.732 | 0.812 | 0.699 | 208.0 | 34.39 | 45 |
| Cascade-RCNN-R50-FPN | 0.965 | 0.712 | 0.803 | 0.714 | 236.0 | 69.29 | 39 |
| RetinaNet-R50-FPN | 0.968 | 0.726 | 0.822 | 0.689 | 210.0 | 36.52 | 44 |
| RT-DETR-R18 | 0.975 | 0.733 | 0.852 | 0.720 | 57.0 | 19.87 | 59 |
| 文献[ | 0.959 | 0.722 | 0.823 | 0.731 | — | — | — |
| 文献[ | 0.934 | 0.697 | 0.813 | 0.687 | — | — | — |
| 文献[ | 0.970 | 0.738 | 0.854 | 0.761 | 89.0 | 22.89 | 72 |
| 文献[ | 0.972 | 0.729 | 0.841 | 0.737 | 234.5 | 74.82 | — |
| 改进的YOLOv8n | 0.990 | 0.751 | 0.886 | 0.792 | 9.1 | 4.06 | 118 |
Tab. 3 Performance comparison of other detection models and improved YOLOv8n
| 模型 | mAP | mAP50:95 | mAP75 | R | GFLOPs | Params/106 | FPS |
|---|---|---|---|---|---|---|---|
| YOLOv3 | 0.973 | 0.702 | 0.829 | 0.756 | 282.0 | 103.67 | 37 |
| YOLOv5n | 0.972 | 0.735 | 0.866 | 0.773 | 7.1 | 2.50 | 134 |
| YOLOv6n | 0.971 | 0.729 | 0.867 | 0.774 | 7.9 | 2.67 | 98 |
| YOLOv8n | 0.969 | 0.735 | 0.869 | 0.780 | 8.1 | 3.00 | 129 |
| YOLOv9t[ | 0.970 | 0.738 | 0.867 | 0.777 | 8.5 | 3.17 | 130 |
| YOLOv10n | 0.963 | 0.721 | 0.872 | 0.776 | 8.2 | 3.08 | 131 |
| YOLO11n | 0.964 | 0.727 | 0.868 | 0.773 | 6.3 | 2.19 | 141 |
| Gold-YOLO | 0.974 | 0.732 | 0.859 | 0.768 | 10.5 | 6.02 | 107 |
| YOLOv8-SPDConv | 0.967 | 0.733 | 0.856 | 0.771 | 9.7 | 4.74 | 111 |
| YOLOv8-EfficientViT | 0.968 | 0.725 | 0.845 | 0.777 | 9.4 | 4.18 | 113 |
| YOLOv8-StarNet | 0.970 | 0.719 | 0.853 | 0.770 | 6.5 | 2.21 | 138 |
| SSD-VGG16 | 0.962 | 0.731 | 0.859 | 0.764 | 98.0 | 28.17 | 64 |
| Faster-RCNN-R50-FPN | 0.974 | 0.732 | 0.812 | 0.699 | 208.0 | 34.39 | 45 |
| Cascade-RCNN-R50-FPN | 0.965 | 0.712 | 0.803 | 0.714 | 236.0 | 69.29 | 39 |
| RetinaNet-R50-FPN | 0.968 | 0.726 | 0.822 | 0.689 | 210.0 | 36.52 | 44 |
| RT-DETR-R18 | 0.975 | 0.733 | 0.852 | 0.720 | 57.0 | 19.87 | 59 |
| 文献[ | 0.959 | 0.722 | 0.823 | 0.731 | — | — | — |
| 文献[ | 0.934 | 0.697 | 0.813 | 0.687 | — | — | — |
| 文献[ | 0.970 | 0.738 | 0.854 | 0.761 | 89.0 | 22.89 | 72 |
| 文献[ | 0.972 | 0.729 | 0.841 | 0.737 | 234.5 | 74.82 | — |
| 改进的YOLOv8n | 0.990 | 0.751 | 0.886 | 0.792 | 9.1 | 4.06 | 118 |
| [1] | MOHD AZAMI M F A, MISRO M Y, HAMIDUN R. Road crash dynamics in Malaysia: analysis of trends and patterns[J]. Heliyon, 2024, 10(18): No.e37457. |
| [2] | KHOSRAVI E, HEMMATYAR A M A, SIAVOSHANI M J, et al. Safe Deep Driving behavior Detection (S3D)[J]. IEEE Access, 2022, 10: 113827-113838. |
| [3] | 宁华晶. 不安全驾驶行为与道路交通事故之间的关系研究[D]. 兰州:兰州交通大学, 2023: 62-63. |
| NING H J. Study on the relationship between unsafe driving behaviors and traffic crashes[D]. Lanzhou: Lanzhou Jiaotong University, 2023: 62-63. | |
| [4] | LATTANZI E, FRESCHI V. Machine learning techniques to identify unsafe driving behavior by means of in-vehicle sensor data[J]. Expert Systems with Applications, 2021, 176: No.114818. |
| [5] | QU F, DANG N, FURHT B, et al. Comprehensive study of driver behavior monitoring systems using computer vision and machine learning techniques[J]. Journal of Big Data, 2024, 11: No.32. |
| [6] | KANG H B. Various approaches for driver and driving behavior monitoring: a review[C]// Proceedings of the 2013 IEEE International Conference on Computer Vision Workshops. Piscataway: IEEE, 2013: 616-623. |
| [7] | ABOSAQ H A, RAMZAN M, ALTHOBIANI F, et al. Unusual driver behavior detection in videos using deep learning models[J]. Sensors, 2022, 23(1): No.311. |
| [8] | HU J, ZHANG X, MAYBANK S. Abnormal driving detection with normalized driving behavior data: a deep learning approach[J]. IEEE Transactions on Vehicular Technology, 2020, 69(7): 6943-6951. |
| [9] | 田文洪,曾柯铭,莫中勤,等. 基于卷积神经网络的驾驶员不安全行为识别[J]. 电子科技大学学报, 2019, 48(3): 381-387. |
| TIAN W H, ZENG K M, MO Z Q, et al. Recognition of unsafe driving behaviors based on convolutional neural network[J]. Journal of University of Electronic Science and Technology of China, 2019, 48(3): 381-387. | |
| [10] | 骆文婕. 基于机器视觉的非安全驾驶行为检测算法研究[D]. 长沙:湖南大学, 2018: 26-27. |
| LUO W J. Research on the detection algorithm of non-safe driving behavior based on machine vision[D]. Changsha: Hunan University, 2018: 26-27. | |
| [11] | 宋知霖. 基于深度学习的不安全驾驶行为检测算法研究[D]. 沈阳:沈阳工业大学, 2021: 22-27. |
| SONG Z L. Research on unsafe driving behavior detection algorithm based on deep learning[D]. Shenyang: Shenyang University of Technology, 2021: 22-27. | |
| [12] | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 779-788. |
| [13] | 李明煜,林家泉,高梅. 面向驾驶员面部目标的FD-YOLOv8轻量化检测算法[J]. 小型微型计算机系统, 2025, 46(11): 2700-2707. |
| LI M Y, LIN J Q, GAO M. FD-YOLOv8 lightweight detection algorithm for driver’s facial target[J]. Journal of Chinese Computer Systems, 2025, 46(11): 2700-2707. | |
| [14] | 孙铁强,魏光辉,宋超,等. 基于YOLO的多模态钢轨表面缺陷检测方法[J]. 电子测量技术, 2024, 47(21): 72-81. |
| SUN T Q, WEI G H, SONG C, et al. Multi-modal rail surface defect detection method based on YOLO[J]. Electronic Measurement Technology, 2024, 47(21): 72-81. | |
| [15] | 邱琳琳,朱卫纲,李永刚,等. 基于改进YOLOv8的SAR图像飞机目标检测算法[J]. 电光与控制, 2025, 32(3): 101-110. |
| QIU L L, ZHU W G, LI Y G, et al. Aircraft detection in SAR images based on improved YOLOv8[J]. Electronics Optics and Control, 2025, 32(3): 101-110. | |
| [16] | HUANG H, CHEN Z, ZOU Y, et al. Channel prior convolutional attention for medical image segmentation[J]. Computers in Biology and Medicine, 2024, 178: No.108784. |
| [17] | 赵佰亭,程瑞丰,贾晓芬. 融合多尺度特征的YOLOv8裂缝缺陷检测算法[J]. 计算机工程与应用, 2024, 60(22): 261-270. |
| ZHAO B T, CHENG R F, JIA X F. YOLOv8 crack defect detection algorithm based on multi-scale features[J]. Computer Engineering and Applications, 2024, 60(22): 261-270. | |
| [18] | BOUHSISSIN S, SAEL N, BENABBOU F, et al. SafeSmartDrive: real-time traffic environment detection and driver behavior monitoring with machine and deep learning[J]. IEEE Access, 2024, 12: 169499-169517. |
| [19] | CHENG Q, LI H, YANG Y, et al. Towards efficient risky driving detection: a benchmark and a semi-supervised model[J]. Sensors, 2024, 24(5): No.1386. |
| [1] | Ming LI, Mengqi WANG, Aili ZHANG, Hua REN, Yuqiang DOU. Image steganography method based on conditional generative adversarial networks and hybrid attention mechanism [J]. Journal of Computer Applications, 2026, 46(2): 475-484. |
| [2] | Zeyi GUO, Fenglian LI, Lichun XU. Double decision mechanism-based deep symbolic regression algorithm [J]. Journal of Computer Applications, 2026, 46(2): 406-415. |
| [3] | Xiaolei CHEN, Zhiwei ZHENG, Xue HUANG, Zhenbin QU. Panoramic video super-resolution network combining spherical alignment and adaptive geometric correction [J]. Journal of Computer Applications, 2026, 46(2): 528-535. |
| [4] | Jinjiao LIN, Canshun ZHANG, Shuya CHEN, Tianxin WANG, Jian LIAN, Yonghui XU. Vehicle insurance fraud detection method based on improved graph attention network [J]. Journal of Computer Applications, 2026, 46(2): 437-444. |
| [5] | Haoqian JIANG, Dong ZHANG, Guanyu LI, Heng CHEN. SetaCRS: Conversational recommender system with structure-enhanced hierarchical task-oriented prompting strategy [J]. Journal of Computer Applications, 2026, 46(2): 368-377. |
| [6] | Feng HAN, Yongfeng BU, Haoxiang LIANG, Shuwen HUANG, Zhaoyang ZHANG, Shijie SUN. Vehicle trajectory anomaly detection based on multi-level spatio-temporal interaction dependency [J]. Journal of Computer Applications, 2026, 46(2): 604-612. |
| [7] | Xiaoyong BIAN, Peiyang YUAN, Qiren HU. Dual-coding space-frequency mixing method for infrared small target detection [J]. Journal of Computer Applications, 2026, 46(1): 252-259. |
| [8] | Zhihui ZAN, Yajing WANG, Ke LI, Zhixiang YANG, Guangyu YANG. Multi-feature fusion speech emotion recognition method based on SAA-CNN-BiLSTM network [J]. Journal of Computer Applications, 2026, 46(1): 69-76. |
| [9] | Hongjun ZHANG, Gaojun PAN, Hao YE, Yubin LU, Yiheng MIAO. Multi-source heterogeneous data analysis method combining deep learning and tensor decomposition [J]. Journal of Computer Applications, 2025, 45(9): 2838-2847. |
| [10] | Jin LI, Liqun LIU. SAR and visible image fusion based on residual Swin Transformer [J]. Journal of Computer Applications, 2025, 45(9): 2949-2956. |
| [11] | Bing YIN, Zhenhua LING, Yin LIN, Changfeng XI, Ying LIU. Emotion recognition method compatible with missing modal reasoning [J]. Journal of Computer Applications, 2025, 45(9): 2764-2772. |
| [12] | Weigang LI, Jiale SHAO, Zhiqiang TIAN. Point cloud classification and segmentation network based on dual attention mechanism and multi-scale fusion [J]. Journal of Computer Applications, 2025, 45(9): 3003-3010. |
| [13] | Zhixiong XU, Bo LI, Xiaoyong BIAN, Qiren HU. Adversarial sample embedded attention U-Net for 3D medical image segmentation [J]. Journal of Computer Applications, 2025, 45(9): 3011-3016. |
| [14] | Panfeng JING, Yudong LIANG, Chaowei LI, Junru GUO, Jinyu GUO. Semi-supervised image dehazing algorithm based on teacher-student learning [J]. Journal of Computer Applications, 2025, 45(9): 2975-2983. |
| [15] | Lina GE, Mingyu WANG, Lei TIAN. Review of research on efficiency of federated learning [J]. Journal of Computer Applications, 2025, 45(8): 2387-2398. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||