


Journal of Computer Applications ›› 2026, Vol. 46 ›› Issue (3): 1004-1010.DOI: 10.11772/j.issn.1001-9081.2025030362
• Frontier and comprehensive applications • Previous Articles Next Articles
Tingquan DENG1( ), Yuling LI1, Yonghang REN1, Tian XIA1, Kunfu WANG2, Shengchun WANG2
), Yuling LI1, Yonghang REN1, Tian XIA1, Kunfu WANG2, Shengchun WANG2
Received:2025-04-07
Revised:2025-07-03
Accepted:2025-07-04
Online:2025-08-13
Published:2026-03-10
Contact:
Tingquan DENG
About author:LI Yuling, born in 1999, M. S. candidate. His research interests include data mining, machine learning.Supported by:
邓廷权1(), 李予凌1, 任泳行1, 夏天1, 王坤福2, 王盛春2
通讯作者:
邓廷权
作者简介:李予凌(1999—),男,四川成都人,硕士研究生,主要研究方向:数据挖掘、机器学习基金资助:CLC Number:
Tingquan DENG, Yuling LI, Yonghang REN, Tian XIA, Kunfu WANG, Shengchun WANG. UAV swarm formation recognition algorithm based on multi-scale complex networks[J]. Journal of Computer Applications, 2026, 46(3): 1004-1010.
邓廷权, 李予凌, 任泳行, 夏天, 王坤福, 王盛春. 基于多尺度复杂网络的无人机集群队形识别算法[J]. 《计算机应用》唯一官方网站, 2026, 46(3): 1004-1010.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2025030362
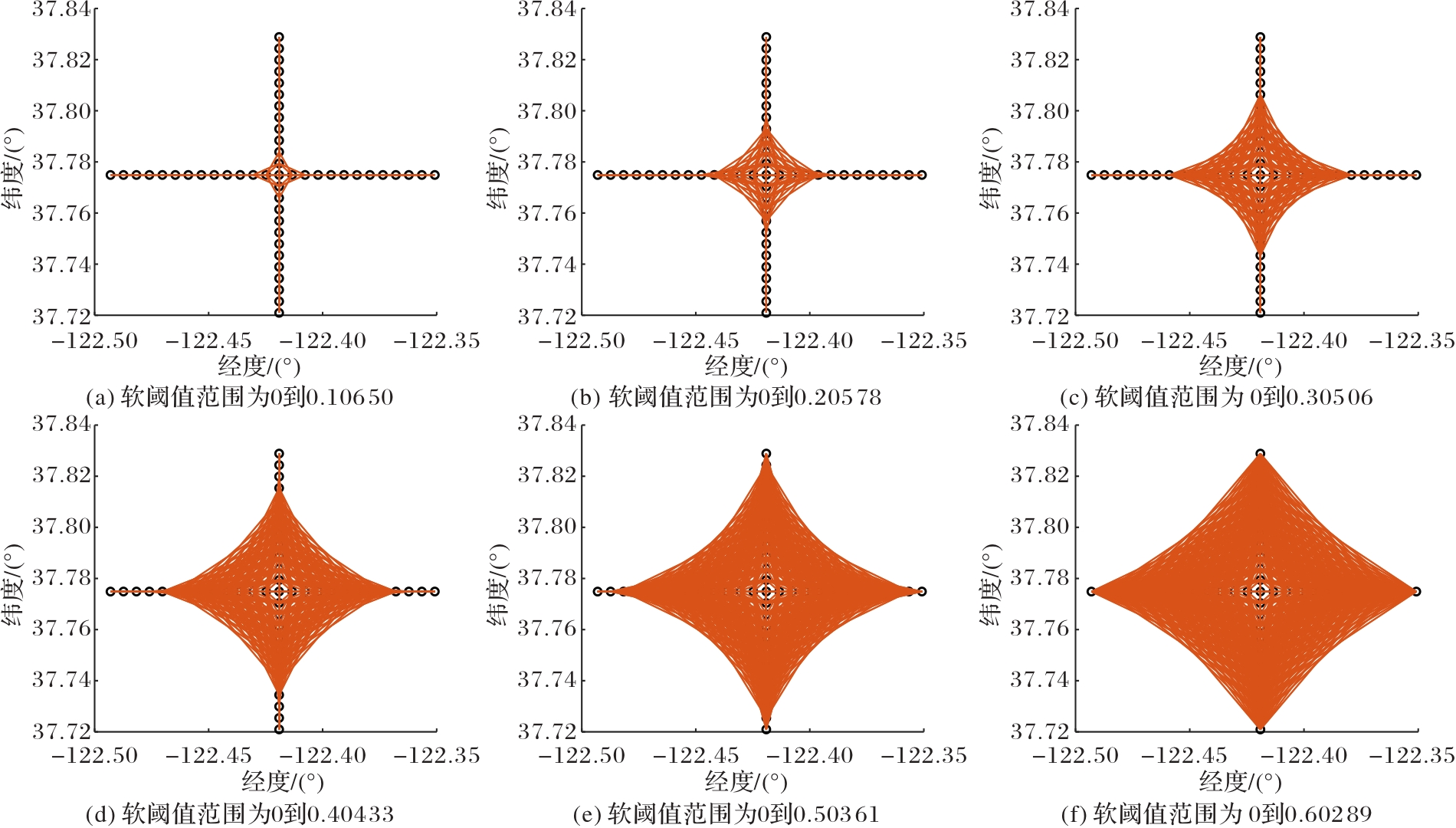
Fig. 1 Multi-scale complex networks of cross-shaped formation under different soft threshold ranges
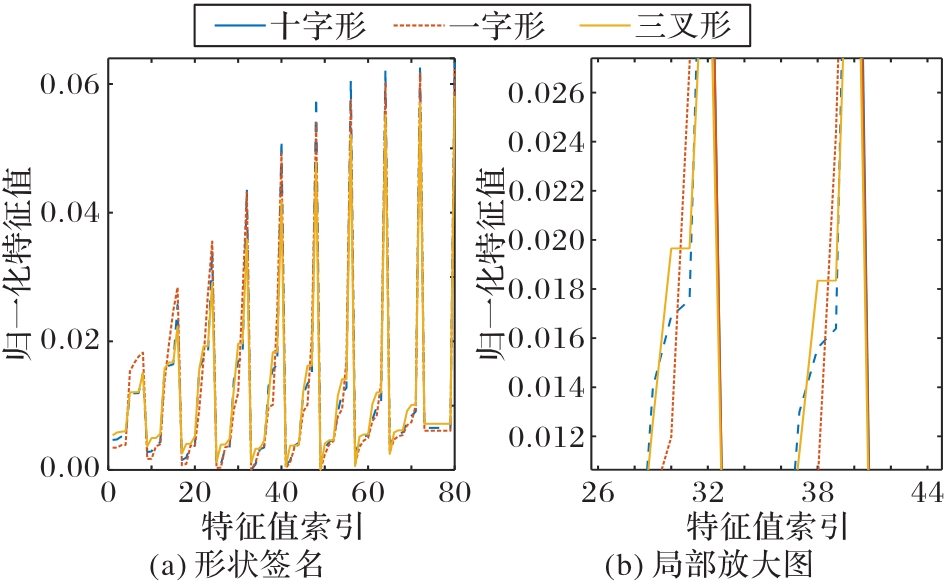
Fig. 2 Comparison of three formations’ shape signatures
| 度量方法 | 队形 | 十字形 | 一字形 | 三叉形 |
|---|---|---|---|---|
| Hellinger距离 | 十字形 | 0.000 0 | 0.079 3 | 0.076 3 |
| 一字形 | 0.079 3 | 0.000 0 | 0.105 5 | |
| 三叉形 | 0.076 3 | 0.105 5 | 0.000 0 | |
Pearson 相关系数 | 十字形 | 0.000 0 | 0.018 7 | 0.007 0 |
| 一字形 | 0.018 7 | 0.000 0 | 0.019 9 | |
| 三叉形 | 0.007 0 | 0.019 9 | 0.000 0 | |
| 余弦相似度 | 十字形 | 0.000 0 | 0.011 3 | 0.006 9 |
| 一字形 | 0.011 3 | 0.000 0 | 0.014 3 | |
| 三叉形 | 0.006 9 | 0.014 3 | 0.000 0 | |
| 欧氏距离 | 十字形 | 0.000 0 | 0.026 5 | 0.024 7 |
| 一字形 | 0.026 5 | 0.000 0 | 0.032 4 | |
| 三叉形 | 0.024 7 | 0.032 4 | 0.000 0 |
Tab. 1 Similarity measurements of three formation templates
| 度量方法 | 队形 | 十字形 | 一字形 | 三叉形 |
|---|---|---|---|---|
| Hellinger距离 | 十字形 | 0.000 0 | 0.079 3 | 0.076 3 |
| 一字形 | 0.079 3 | 0.000 0 | 0.105 5 | |
| 三叉形 | 0.076 3 | 0.105 5 | 0.000 0 | |
Pearson 相关系数 | 十字形 | 0.000 0 | 0.018 7 | 0.007 0 |
| 一字形 | 0.018 7 | 0.000 0 | 0.019 9 | |
| 三叉形 | 0.007 0 | 0.019 9 | 0.000 0 | |
| 余弦相似度 | 十字形 | 0.000 0 | 0.011 3 | 0.006 9 |
| 一字形 | 0.011 3 | 0.000 0 | 0.014 3 | |
| 三叉形 | 0.006 9 | 0.014 3 | 0.000 0 | |
| 欧氏距离 | 十字形 | 0.000 0 | 0.026 5 | 0.024 7 |
| 一字形 | 0.026 5 | 0.000 0 | 0.032 4 | |
| 三叉形 | 0.024 7 | 0.032 4 | 0.000 0 |
| 顶点数n | 时间复杂度 |
|---|---|
| O(103) | |
| O(4×104) | |
| O(106) | |
| O(n2) |
Tab. 2 Time complexity corresponding to different values of n
| 顶点数n | 时间复杂度 |
|---|---|
| O(103) | |
| O(4×104) | |
| O(106) | |
| O(n2) |
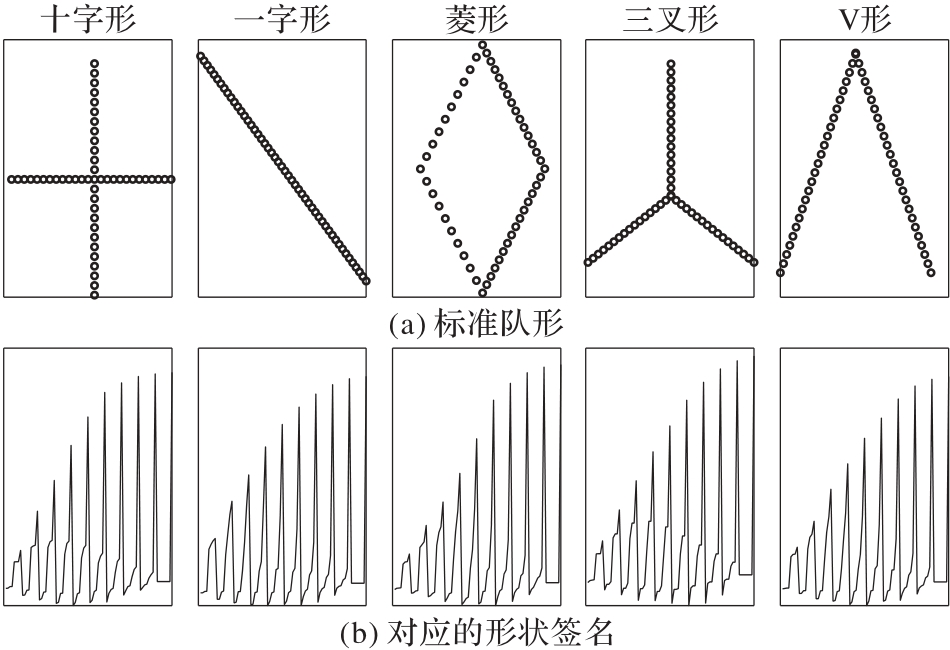
Fig. 3 Five standard formations and their corresponding shape signatures
| Δ | 不同队形的准确率/% | |||||
|---|---|---|---|---|---|---|
| 十字形 | 一字形 | 菱形 | 三叉形 | V形 | ||
| 4 | 0.02 | 100.00 | 100.00 | 8.33 | 95.00 | 100.00 |
| 0.05 | 100.00 | 100.00 | 3.33 | 88.33 | 93.33 | |
| 0.10 | 100.00 | 100.00 | 3.33 | 85.00 | 91.67 | |
| 0.20 | 100.00 | 100.00 | 6.67 | 58.33 | 35.00 | |
| 6 | 0.02 | 100.00 | 100.00 | 8.33 | 93.33 | 100.00 |
| 0.05 | 100.00 | 100.00 | 3.33 | 86.67 | 100.00 | |
| 0.10 | 100.00 | 100.00 | 0.00 | 85.00 | 95.00 | |
| 0.20 | 100.00 | 100.00 | 10.00 | 58.33 | 58.33 | |
| 8 | 0.02 | 100.00 | 100.00 | 18.33 | 93.33 | 100.00 |
| 0.05 | 100.00 | 100.00 | 5.00 | 91.67 | 100.00 | |
| 0.10 | 100.00 | 100.00 | 5.00 | 88.33 | 98.33 | |
| 0.20 | 100.00 | 100.00 | 18.33 | 58.33 | 66.67 | |
Tab. 3 Impact of nλand Δ on accuracy
| Δ | 不同队形的准确率/% | |||||
|---|---|---|---|---|---|---|
| 十字形 | 一字形 | 菱形 | 三叉形 | V形 | ||
| 4 | 0.02 | 100.00 | 100.00 | 8.33 | 95.00 | 100.00 |
| 0.05 | 100.00 | 100.00 | 3.33 | 88.33 | 93.33 | |
| 0.10 | 100.00 | 100.00 | 3.33 | 85.00 | 91.67 | |
| 0.20 | 100.00 | 100.00 | 6.67 | 58.33 | 35.00 | |
| 6 | 0.02 | 100.00 | 100.00 | 8.33 | 93.33 | 100.00 |
| 0.05 | 100.00 | 100.00 | 3.33 | 86.67 | 100.00 | |
| 0.10 | 100.00 | 100.00 | 0.00 | 85.00 | 95.00 | |
| 0.20 | 100.00 | 100.00 | 10.00 | 58.33 | 58.33 | |
| 8 | 0.02 | 100.00 | 100.00 | 18.33 | 93.33 | 100.00 |
| 0.05 | 100.00 | 100.00 | 5.00 | 91.67 | 100.00 | |
| 0.10 | 100.00 | 100.00 | 5.00 | 88.33 | 98.33 | |
| 0.20 | 100.00 | 100.00 | 18.33 | 58.33 | 66.67 | |
| nλ | nΔ | 不同队形下的准确率/% | ||||
|---|---|---|---|---|---|---|
| 十字形 | 一字形 | 菱形 | 三叉形 | V形 | ||
| 4 | 6 | 100.00 | 100.00 | 25.00 | 86.67 | 51.67 |
| 8 | 100.00 | 100.00 | 8.33 | 68.33 | 60.00 | |
| 10 | 100.00 | 100.00 | 73.33 | 71.67 | 93.33 | |
| 6 | 6 | 100.00 | 100.00 | 35.00 | 93.33 | 60.00 |
| 8 | 100.00 | 100.00 | 8.33 | 75.00 | 75.00 | |
| 10 | 100.00 | 100.00 | 81.67 | 71.67 | 96.67 | |
| 8 | 6 | 100.00 | 100.00 | 40.00 | 93.33 | 65.00 |
| 8 | 100.00 | 100.00 | 11.67 | 71.67 | 78.33 | |
| 10 | 100.00 | 100.00 | 88.33 | 73.33 | 96.67 | |
Tab. 4 Impact of nλ and nΔ on accuracy
| nλ | nΔ | 不同队形下的准确率/% | ||||
|---|---|---|---|---|---|---|
| 十字形 | 一字形 | 菱形 | 三叉形 | V形 | ||
| 4 | 6 | 100.00 | 100.00 | 25.00 | 86.67 | 51.67 |
| 8 | 100.00 | 100.00 | 8.33 | 68.33 | 60.00 | |
| 10 | 100.00 | 100.00 | 73.33 | 71.67 | 93.33 | |
| 6 | 6 | 100.00 | 100.00 | 35.00 | 93.33 | 60.00 |
| 8 | 100.00 | 100.00 | 8.33 | 75.00 | 75.00 | |
| 10 | 100.00 | 100.00 | 81.67 | 71.67 | 96.67 | |
| 8 | 6 | 100.00 | 100.00 | 40.00 | 93.33 | 65.00 |
| 8 | 100.00 | 100.00 | 11.67 | 71.67 | 78.33 | |
| 10 | 100.00 | 100.00 | 88.33 | 73.33 | 96.67 | |
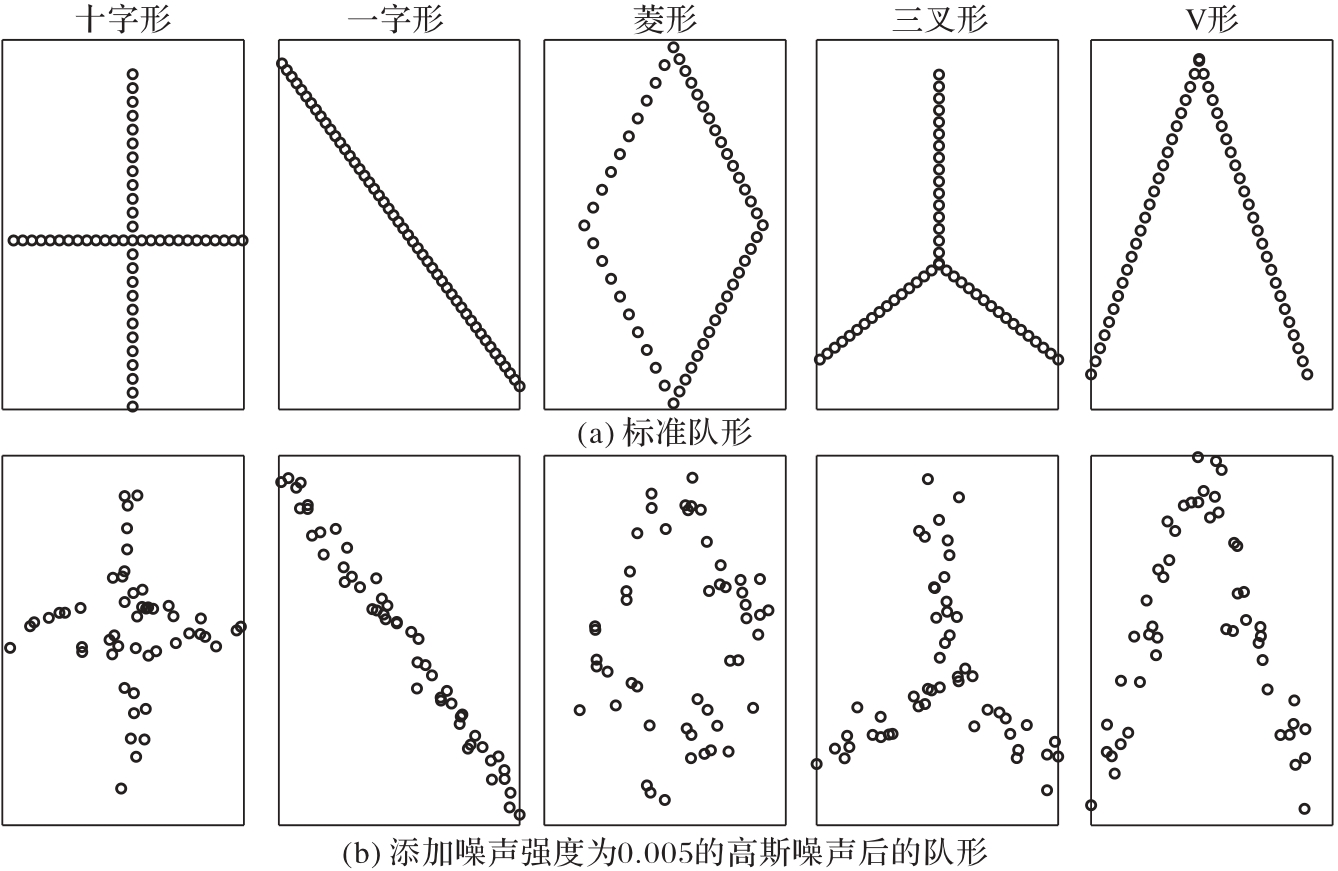
Fig. 4 Comparison of five formations before and after adding noise
| 强度 | 队形 | 不同方法的识别准确率/% | |||
|---|---|---|---|---|---|
| 自适应阈值 | 硬阈值 | Hough变换 | SC | ||
| 0.003 | 十字形 | 100.00 | 100.00 | 100.00 | 100.00 |
| 一字形 | 100.00 | 100.00 | 100.00 | 100.00 | |
| 菱形 | 96.67 | 13.33 | 100.00 | 100.00 | |
| 三叉形 | 100.00 | 100.00 | 85.00 | 95.00 | |
| V形 | 100.00 | 100.00 | 100.00 | 100.00 | |
| 0.004 | 十字形 | 100.00 | 100.00 | 100.00 | 100.00 |
| 一字形 | 100.00 | 100.00 | 100.00 | 98.33 | |
| 菱形 | 96.67 | 46.67 | 100.00 | 93.33 | |
| 三叉形 | 85.00 | 90.00 | 86.67 | 91.67 | |
| V形 | 100.00 | 100.00 | 98.33 | 95.00 | |
| 0.005 | 十字形 | 100.00 | 100.00 | 98.33 | 100.00 |
| 一字形 | 100.00 | 100.00 | 100.00 | 100.00 | |
| 菱形 | 88.33 | 18.33 | 76.67 | 86.67 | |
| 三叉形 | 93.33 | 85.00 | 91.67 | 83.33 | |
| V形 | 96.70 | 100.00 | 90.00 | 88.33 | |
Tab. 5 Recognition accuracies of five formations under different noise intensities
| 强度 | 队形 | 不同方法的识别准确率/% | |||
|---|---|---|---|---|---|
| 自适应阈值 | 硬阈值 | Hough变换 | SC | ||
| 0.003 | 十字形 | 100.00 | 100.00 | 100.00 | 100.00 |
| 一字形 | 100.00 | 100.00 | 100.00 | 100.00 | |
| 菱形 | 96.67 | 13.33 | 100.00 | 100.00 | |
| 三叉形 | 100.00 | 100.00 | 85.00 | 95.00 | |
| V形 | 100.00 | 100.00 | 100.00 | 100.00 | |
| 0.004 | 十字形 | 100.00 | 100.00 | 100.00 | 100.00 |
| 一字形 | 100.00 | 100.00 | 100.00 | 98.33 | |
| 菱形 | 96.67 | 46.67 | 100.00 | 93.33 | |
| 三叉形 | 85.00 | 90.00 | 86.67 | 91.67 | |
| V形 | 100.00 | 100.00 | 98.33 | 95.00 | |
| 0.005 | 十字形 | 100.00 | 100.00 | 98.33 | 100.00 |
| 一字形 | 100.00 | 100.00 | 100.00 | 100.00 | |
| 菱形 | 88.33 | 18.33 | 76.67 | 86.67 | |
| 三叉形 | 93.33 | 85.00 | 91.67 | 83.33 | |
| V形 | 96.70 | 100.00 | 90.00 | 88.33 | |
| [1] | SKOROBOGATOV G, BARRADO C, SALAMÍ E. Multiple UAV systems: a survey [J]. Unmanned Systems, 2020, 8(2): 149-169. |
| [2] | KHELIFI M, BUTUN I. Swarm Unmanned Aerial Vehicles (SUAVs): a comprehensive analysis of localization, recent aspects, and future trends [J]. Journal of Sensors, 2022, 2022: No.8600674. |
| [3] | KAMEL M A, YU X, ZHANG Y. Formation control and coordination of multiple unmanned ground vehicles in normal and faulty situations: a review [J]. Annual Reviews in Control, 2020, 49: 128-144. |
| [4] | ABRAHAM A, GUO H, LIU H. Swarm intelligence: foundations, perspectives and applications [M]// NEDJAH N, DE MACEDO MOURELLE L. Swarm intelligent systems, SCI 26. Berlin: Springer, 2006: 3-25. |
| [5] | 李鹏举,毛鹏军,耿乾,等. 无人机集群技术研究现状与趋势[J]. 航空兵器, 2020, 27(4): 25-32. |
| LI P J, MAO P J, GENG Q, et al. Research status and trend of UAV swarm technology [J]. Aero Weaponry, 2020, 27(4): 25-32. | |
| [6] | CEVIK P, KOCAMAN I, AKGUL A S, et al. The small and silent force multiplier: a swarm UAV — electronic attack [J]. Journal of Intelligent and Robotic Systems, 2013, 70(1/2/3/4): 595-608. |
| [7] | 梁晓龙,张佳强,吕娜. 无人机集群[M]. 西安:西北工业大学出版社, 2018. |
| LIANG X L, ZHANG J Q, LYU N. UAV swarms[M]. Xi’an: Northwestern Polytechnical University Press, 2018. | |
| [8] | 冷画屏,关庆云,吴晓锋. 基于领域知识的海上编队线型队形识别[J]. 舰船科学技术, 2013, 35(2): 103-106. |
| LENG H P, GUAN Q Y, WU X F. Recognition of naval fleet line type formation based on domain knowledge [J]. Ship Science and Technology, 2013, 35(2): 103-106. | |
| [9] | 刘文一,孙伟,朱良明,等. 舰载飞行器打击水面舰艇编队队形识别和目标选择方法[J]. 兵器装备工程学报, 2020, 41(2): 85-89. |
| LIU W Y, SUN W, ZHU L M, et al. Study on formation recognition and target selection method of shipborne aircraft against warship formation [J]. Journal of Ordnance Equipment Engineering, 2020, 41(2): 85-89. | |
| [10] | HE H, WU L, HU X. Warship formation extraction and recognition based on density-based spatial clustering of applications with noise and improved convolutional neural network[J]. IET Radar, Sonar and Navigation, 2022, 16(12): 1912-1923. |
| [11] | SAGI S V V, PETNGA L. Multi-UAS formation recognition in dynamic environments [J]. Procedia Computer Science, 2020, 168: 241-248. |
| [12] | HAN Y, CHEN J, QIAN J, et al. Graph spectral perturbation for 3D point cloud contrastive learning [C]// Proceedings of the 31st ACM International Conference on Multimedia. New York: ACM, 2023: 5389-5398. |
| [13] | ZHAO Z, WANG H, YU X. Spectral-spatial graph attention network for semisupervised hyperspectral image classification [J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: No.5503905. |
| [14] | COSTA L F, RODRIGUES F A, TRAVIESO G, et al. Characterization of complex networks: a survey of measurements[J]. Advances in Physics, 2007, 56(1): 167-242. |
| [15] | BACKES A R, CASANOVA D, BRUNO O M. A complex network-based approach for boundary shape analysis [J]. Pattern Recognition, 2009, 42(1): 54-67. |
| [16] | 陈宝林. 最优化理论与算法[M]. 2版. 北京:清华大学出版社, 2005: 256-259. |
| CHEN B L. Optimization theory and algorithms [M]. 2nd ed. Beijing: Tsinghua University Press, 2005: 256-259. | |
| [17] | ALBERT R, BARABÁSI A L. Statistical mechanics of complex networks [J]. Reviews of Modern Physics, 2002, 74(1): 47-97. |
| [18] | DE OLIVEIRA A B, SILVA P R DA, BARONE D A C. A novel 2D shape signature method based on complex network spectrum[J]. Pattern Recognition Letters, 2015, 63: 43-49. |
| [1] | Hengxian TANG, Yuan YAO, Haoxiang KANG. Research and implementation of large-scale unmanned aerial vehicle swarm simulation engine based on container [J]. Journal of Computer Applications, 2025, 45(8): 2704-2711. |
| [2] | Bogan FAN, Shuqing WANG, Kaiyuan CHEN. Small target detection model for UAV aerial photography based on improved YOLOv8 [J]. Journal of Computer Applications, 2025, 45(7): 2342-2350. |
| [3] | Bingquan LIN, Lei LIU, Huafeng LI, Chen LIU. Secure cluster control of UAVs under DoS attacks based on APF and DDPG algorithm [J]. Journal of Computer Applications, 2025, 45(4): 1241-1248. |
| [4] | Xingwang WANG, Qingyang ZHANG, Shouyong JIANG, Yongquan DONG. Dynamic UAV path planning based on modified whale optimization algorithm [J]. Journal of Computer Applications, 2025, 45(3): 928-936. |
| [5] | Hailin XIAO, Bo TIAN, Bin HU, Xiangting KONG, Yuanyuan WU, Renyu MA, Zhongshan ZHANG. Multi-scale small target detection algorithm for UAV perspective based on channel-prior multi-scale cross-axis attention-YOLO [J]. Journal of Computer Applications, 2025, 45(12): 4021-4029. |
| [6] | Xiaojuan CHEN, Wei ZHANG. Task allocation of unmanned aerial vehicle for rural last-mile delivery based on reinforcement learning [J]. Journal of Computer Applications, 2025, 45(12): 4055-4063. |
| [7] | Lili GUO, Xiaodong JI, Shibing ZHANG. Throughput maximization of UAV relaying system with multiple user pairs [J]. Journal of Computer Applications, 2025, 45(11): 3692-3697. |
| [8] | Lingxia MU, Zhengjun ZHOU, Ban WANG, Youmin ZHANG, Xianghong XUE, Kaikai NING. Formation obstacle-avoidance and reconfiguration method for multiple UAVs [J]. Journal of Computer Applications, 2024, 44(9): 2938-2946. |
| [9] | Tianyu HUANG, Yuanxing LI, Hao CHEN, Zijia GUO, Mingjun WEI. User cluster partitioning method based on weighted fuzzy clustering in ground-air collaboration scenarios [J]. Journal of Computer Applications, 2024, 44(5): 1555-1561. |
| [10] | Zhiqiang ZHENG, Haibin DUAN. Short-range UAV air combat maneuver decision-making via finite tolerance pigeon-inspired optimization [J]. Journal of Computer Applications, 2024, 44(5): 1401-1407. |
| [11] | Rui TANG, Shibo YUE, Ruizhi ZHANG, Chuan LIU, Chuanlin PANG. Energy efficiency optimization mechanism for UAV-assisted and non-orthogonal multiple access-enabled data collection system [J]. Journal of Computer Applications, 2024, 44(4): 1209-1218. |
| [12] | Meiyu CAI, Runzhe ZHU, Fei WU, Kaiyu ZHANG, Jiale LI. Cross-view matching model based on attention mechanism and multi-granularity feature fusion [J]. Journal of Computer Applications, 2024, 44(3): 901-908. |
| [13] | Huzhen GAO, Changping DU, Yao ZHENG. Gimbal system control algorithm of unmanned aerial vehicle based on extended state observer [J]. Journal of Computer Applications, 2024, 44(2): 604-610. |
| [14] | Lin WANG, Jingliang LIU, Wuwei WANG. Small target detection method in UAV images based on fusion of dilated convolution and Transformer [J]. Journal of Computer Applications, 2024, 44(11): 3595-3602. |
| [15] | Jian SUN, Baoquan MA, Zhuiwei WU, Xiaohuan YANG, Tao WU, Pan CHEN. Joint optimization of UAV swarm path planning and task allocation balance in earthquake scenarios [J]. Journal of Computer Applications, 2024, 44(10): 3232-3239. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||